Новые возможности автономной системы управления модернизированных кораблей «Союз» и «Прогресс» для реализации «быстрой» встречи с МКС

Автор: Микрин Евгений Анатольевич, Орловский Игорь Владимирович, Брагазин Александр Федорович, Усков Алексей Викторович
Журнал: Космическая техника и технологии @ktt-energia
Рубрика: Динамика, баллистика, управление движением летательных аппаратов
Статья в выпуске: 4 (11), 2015 года.
Бесплатный доступ
Рассматриваются алгоритмы навигации, наведения и управления траекторией, реализованные в процессе модернизации системы управления российских кораблей серий «Союз» и «Прогресс». Система управления базируется на корректируемой бесплатформенной инерциальной навигационной системе, использующей близкую к реальной модель движения космических аппаратов. Модернизация алгоритмов управления обусловлена новыми возможностями навигации, связанными с установкой аппаратуры спутниковой навигации на кораблях и Международной космической станции, позволяющими начать автоматическое сближение со стартовой позиции. Приводится описание алгоритма наведения для расчета на борту корабля всех маневров плана встречи, учитывающего требование безопасного сближения и ограничение на скорость корабля относительно орбитальной станции на момент встречи. Рассматриваются возможности по реализации операции встречи по так называемым схемам «быстрой» стыковки. Представлена оценка зависимости границ оптимального диапазона фаз от продолжительности операции встречи для «быстрых» схем. Описывается стратегия расширения оптимального диапазона фаз для применяемой в настоящее время четырехвитковой схемы сближения с навигационным обеспечением от радио- контроля орбиты. Приводятся результаты реализации встречи корабля «Союз ТМА-15М» с МКС и моделирования сближения с использованием аппаратуры спутниковой навигации.
Корабль, космическая станция, "быстрая" встреча, маневр, спутниковая навигация, наведение, управление
Короткий адрес: https://sciup.org/14343497
IDR: 14343497 | УДК: 629.78.076.66
New capabilities of the autonomous control system of upgraded Soyuz and Progress spacecraft for implementing a «quick» rendezvous with the ISS
The paper discusses algorithms for navigation, guidance and trajectory control implemented in the course of upgrading the control system of Russian spacecraft of Soyuz and Progress series. The control system is based on an adjustable strapdown inertial navigation system, using a realistic model of spacecraft motion. The upgrade of control algorithms was prompted by the new navigation capabilities provided by the installation of satellite navigation hardware onboard spacecraft and the International Space Station, which allow starting automatic rendezvous from the initial position. It provides a description of the guidance algorithm for calculating onboard the spacecraft all the maneuvers of the rendezvous plan, which takes into account the requirement of safe approach and constraints on the spacecraft velocity with respect to the orbital station during rendezvous. It discusses the feasibility of implementing fhe rendezvous operation using the so-called «quick» docking profiles. It provides an estimate of the relationship between the boundaries of the optimal range of phases and the duration of the rendezvous operation for «quick» profiles. It describes a strategy for expanding the range of phases for the currently used 4-orbit rendezvous profile with navigation support from radio monitoring of the orbit. It provides the results of the rendezvous with the ISS performed by Soyuz TMA-15M spacecraft, and the results of a simulation of a rendezvous using satellite navigation equipment.
Текст научной статьи Новые возможности автономной системы управления модернизированных кораблей «Союз» и «Прогресс» для реализации «быстрой» встречи с МКС
МИКРИН Е.А.
ОРЛОВСКИЙ И.В.
БРАГАЗИН А.Ф.

УСКОВ А.В.
Принципы построения и алгоритмы системы управления сближением
Система управления движением (СУД) российских кораблей серий «Союз» и «Прогресс» с использованием бортовых цифровых вычислительных машин создана около сорока лет тому назад. С тех пор она неоднократно модернизировалась, расширяя свои функциональные возможности. Этапы модернизации, связанные с переходом на высокопроизводительный бортовой цифровой вычислительный комплекс (БЦВК) и современную измерительную аппаратуру, описаны в работе [1].
Опыт эксплуатации подтвердил правильность принципов, положенных в основу разработки и проектирования СУД. В первую очередь это относится к базовому принципу построения СУД — использованию корректируемой бесплатформенной инерциальной навигационной системы (БИНС) [2]. БИНС моделирует движение активного корабля (АК) — как перемещение центра масс, так и вращение вокруг центра масс — путем численного интегрирования системы дифференциальных уравнений для ряда кинематических параметров движения. Для повышения точности навигационных параметров БИНС корректируется в полете по информации от инерциальных датчиков и датчиков внешней информации.
Управление движением АК при сближении с орбитальной станцией (ОС) основывается на информации, получаемой от бортовой модели движения космических аппаратов (МДКА), реализованной в БЦВК. Применение методов диагностики первичной информации, современных методов динамической фильтрации для уточнения движения АК и ОС позволяет достичь высокой точности управления относительным движением объектов, участвующих во встрече. Полная информация о текущем векторе состояния дает возможность построить развитые алгоритмы управления, отвечающие назначенным показателям качества.
При создании системы управления сближением важнейшее значение имеет использование современных методов управления, поскольку улучшение качества выполнения операции сближения, в первую очередь сокращение продолжительности полета от выведения до механического контакта космических аппаратов (КА), уменьшение потребных затрат топлива и повышение точности причаливания, должно быть достигнуто, главным образом, за счет оптимизации алгоритмов.
В предлагаемой публикации рассматриваются алгоритмы навигации, наведения и управления траекторией, реализованные в процессе модернизации системы управления, и новые возможности по реализации операции встречи, в частности, при выполнении сближения по так называемым схемам «быстрой» встречи [3].
Навигационный блок системы управления сближением АК является составной частью БИНС. Для повышения точности навигационных параметров навигационный блок организован по классической схеме «предиктор – корректор», когда прогнозируемая на текущий момент времени информация о движении корректируется по данным измерителя орбитального движения — аппаратуры спутниковой навигации (АСН) и измерителя относительного движения КА — радиосистемы «Курс». Динамический фильтр измерений, поступающих от радиосистемы «Курс» на заключительном участке операции встречи с дальности от 200 км до контакта с ОС, подтверждает свою эффективность в полетах «Союз ТМ» и «Прогресс М» к ОС «Мир» и Международной космической станции (МКС), начиная с 1986 г. Доработки алгоритмов навигационного блока обусловлены новыми возможностями навигации, связанными с установкой АСН на кораблях и МКС [4–6].
Установка АСН на борту КА позволяет начать автоматическое сближение АК с МКС со стартовой позиции. В самом деле, начальная информация об орбите МКС может быть получена в Центре управления полетом (ЦУП) либо от аппаратуры АСН-М, размещенной на МКС, либо по измерениям с наземных измерительных пунктов на нескольких витках ее полета, предшествующих старту АК. На АК БИНС может начать функционирование со старта. Начальная информация о параметрах движения АК может задаваться в стартовой системе координат с геодезической точностью привязки. Для текущего прогнозирования вектора состояния может быть использована информация о кинематических параметрах движения в связанной системе координат, когда информация об ориентации АК поступает с датчиков угловой скорости, информация о перемещениях — с акселерометров. После выведения на орбиту и отделения от носителя АК ориентируется в расчетной орбитальной системе координат и, в принципе, можно начать процесс управления его движением.
Управление сближением производится на основе параметров относительного движения, получаемых в навигационном блоке как разность параметров орбитального движения МКС и АК. Отметим, что параметры орбиты
АК уточняются с помощью введенного в состав навигационного блока динамического фильтра, использующего измерения от АСН, а текущие параметры движения МКС на борту АК определяются прогнозированием. Для прогнозирования орбитального движения КА в модели гравитационного поля Земли учитываются все гармоники до восьмого порядка включительно. В качестве бортовой модели плотности верхней атмосферы Земли принят ГОСТ [7]. Выбранная модель движения КА совпадает с основной баллистической вычислительной моделью ЦУП, используемой для расчетов маневров [8]. При выборе модели движения учтено, что уставочные значения векторов состояния КА могут определяться на основе обработки траекторных измерений от наземных измерительных пунктов (НИП) и решения задачи согласования [9] используемых моделей движения на АК и в ЦУП на заданном интервале времени. Задача согласования МДКА решается тем быстрее (а качество ее решения тем выше), чем ближе бортовая модель движения к основной баллистической вычислительной модели ЦУП.
Наведение определяется [10] как схема организации кинематики движения центра масс КА. Задача наведения состоит в определении в детерминированной постановке программы полета АК к ОС, т. е. моментов приложения, величин и направлений поправок к скорости АК для решения задачи встречи. Для многовитковых перелетов, использующихся для практической реализации операции встречи [8], как правило, принимается, что импульсы прикладываются только на первом разрешенном витке и последнем витке, причем на каждом из них прикладывается не более двух импульсов. Формулировка «первый разрешенный виток» означает, что к началу маневрирования в БИНС АК введены вектора состояния ОС и АК, и построена опорная система координат. План встречи, таким образом, предусматривает реализацию двух межорбитальных перелетов. После реализации импульсов на первом витке корабль переходит с орбиты выведения на промежуточную, так называемую орбиту фазирования. После реализации импульсов на последнем витке КА касается орбиты станции с заданным значением скорости в расчетной точке встречи.
Алгоритмы наведения на последнем витке предусматривают сближение с вынесенной относительно ОС точкой для предотвращения столкновения КА при отказе двигательной установки. При подлете к ОС используются эффективные алгоритмы асимптотического торможения, корректирующие промах по координатам и уменьшающие величину относительной скорости [10, 11].
Стыковка является «запланированным столкновением» АК и ОС с заданными характеристиками относительного движения на момент механического контакта. Для того, чтобы они находились внутри допустимых границ, параметры движения должны поддерживаться в некоторых границах еще до контакта. При выходе за установленные границы должна исполняться коррекция относительной скорости для формирования безопасной траектории. С дальности порядка 400 м и до контакта, при выполнении облета ОС для выхода к назначенному стыковочному узлу и причаливания, используется метод управления по линии визирования. На причаливании, в частности, применен обеспечивающий безопасное сближение метод параллельного наведения [10] с периодическим обнулением угловой скорости вращения линии визирования.
Выбор стратегии управления является одной из главных задач алгоритма управления траекторией. На автономном участке сближения, начинающемся за виток до расчетного момента встречи, реализуется управление с обратной связью. Важнейшее значение имеют алгоритмы логики корректирования, определяющие момент приложения очередного импульса в зависимости от текущих оценок движения, и, в конечном счете, затраты топлива на операцию встречи. Реализация корректирующих импульсов до последнего витка производится по «разомкнутой» схеме управления. Назначается момент времени для начала разворота АК в требуемое положение, по окончании разворота включается двигательная установка. В процессе работы обеспечивается стабилизация АК, выключение двигателя производится по сигналу акселерометра, и АК переводится в штатную ориентацию.
Как и алгоритмы БИНС с коррекцией от радиосистемы «Курс», алгоритмы наведения и управления траекторией на втором перелете — с орбиты фазирования в заданную прицельную точку с заданным вектором скорости, называемые алгоритмами автономного управления [8], эффективно используются на российских кораблях с 1986 г. Доработки алгоритмов наведения и управления траекторией основаны на новых возможностях навигации, позволяющих начать сближение АК с ОС с момента выведения корабля.
Формально рассуждая, для достижения цели в состав алгоритмов наведения необходимо добавить алгоритм расчета межорбитального перелета с орбиты выведения на некомпланарную орбиту фазирования. Однако, поскольку параметры орбиты фазирования должны выбираться из условия встречи КА после завершения второго перелета, задача определения орбиты фазирования может быть решена только при одновременном определении двух перелетов, составляющих операцию встречи. При определении орбиты фазирования учтено ограничение на величину и направление относительной скорости по трансверсали к орбите ОС в расчетной точке встречи. Безопасное сближение может быть обеспечено назначением орбиты фазирования с заданным выносом по бинормали в расчетный момент встречи. Вид траекторий сближения автономного алгоритма наведения в орбитальной системе координат (ОСК) МКС представлен на рис. 1.
Рис. 1. Траектории сближения в орбитальной системе координат МКС в функции продолжительности встречи для начальной фазы 30°
Основное требование, предъявляемое к алгоритму операции встречи — минимизация потребного расхода топлива при выполнении заданных ограничений. Используются известные оптимальные решения задачи межорбитального перелета между околокруговыми некомпланарными орбитами [12, 13]. При большой продолжительности участка фазирования накопившаяся ошибка относительного расположения АК и ОС вдоль дуги орбиты должна быть скомпенсирована к началу второго перелета. В соответствии со сложившейся практикой, для решения этой задачи [8] предусматривается реализация поправочного импульса, направленного вдоль трансверсали к орбите. Момент приложения этого импульса назначается за целое число витков до расчетного момента встречи, а для пересчета текущей программы встречи используется метод распределения импульсов оптимального межорбитального перелета [10]. Решение, полученное для линеаризованной модели относительного движения КА, итеративно уточняется для близкой к реальной МДКА, используемой для прогнозирования орбитального движения.
Коррекция фазы при реализации «быстрой» встречи
Алгоритм расчета плана встречи как композиции двух оптимальных межорбитальных перелетов, разделенных участком пассивного полета по орбите фазирования, имеет структурное ограничение на продолжительность операции встречи с момента начала маневрирования до прицельного момента встречи. Для продолжительности первого оптимального межорбитального перелета необходимо зарезервировать виток [13]. При сохранении управления с обратной связью на последнем витке операции, что обеспечивает преемственность алгоритма, расчетная продолжительность операции ограничена снизу двумя витками. Отметим, что ограничение обусловлено требованием оптимальности первого перелета. Если же задачу решать при более слабом ограничении, что характеристическая скорость встречи ограничена сверху в соответствии с количеством топлива, которое разрешено потратить на операцию, то можно определить двухимпульсный перелет на орбиту фазирования продолжительностью менее витка.
Сверху продолжительность встречи принципиально не ограничена, и введенный в состав программного обеспечения алгоритм может использоваться для обеспечения стыковки модернизированных кораблей к МКС по традиционным схемам встречи продолжительностью 1…3 сут [8]. Настройки алгоритма, введенные на борт АК как полетное задание, позволяют при необходимости реализовать оптимальный перелет на заданную «парковочную» орбиту в окрестности МКС.
Для известных на момент выведения АК параметров движения ОС и АК выбор продолжительности схемы встречи определяется величиной угла между радиус-вектором ОС и проекцией радиус-вектора АК на плоскость движения станции. Этот угол принято называть фазой [8]. Для выбранного способа наведения каждой продолжительности встречи соответствует определенный диапазон фаз, в котором характеристическая скорость встречи минимальна. Ширина диапазона оптимальных фаз уменьшается с уменьшением продолжительности встречи. Так, если трехсуточная схема встречи обеспечивает оптимальный расход топлива при любой начальной фазе на момент выведения АК, то для двухсуточной ширина упомянутого диапазона составляет примерно 140°, для односуточной — 60° [8]. В последние годы появились публикации [3], описывающие кинематику так называемых «быстрых» схем встречи для обеспечения ускоренного доступа к ОС через несколько витков полета АК после выведения (в статье [3] приведена библиография по данной проблеме). При назначении продолжительности встречи для российских кораблей необходимо учитывать наличие «глухих» витков (с 6-го по 11-й) из-за отсутствия связи с НИП на территории России. Разумно ограничиться продолжительностью встречи около четырех витков, оставив на зону видимости пятого витка контроль заключительных операций по стыковке. В этой же зоне видимости возможно провести измерения орбиты АК и для нештатной ситуации, когда стыковка не выполнена, оперативно рассчитать маневры для повторного сближения, не дожидаясь зоны видимости 12-го витка.
Назначение продолжительности сближения до четырех витков требует, чтобы фаза на момент выведения АК находилась в пределах, обеспечивающих оптимальный или хотя бы приемлемый расход топлива, не превышающий заданной границы расхода. Поэтому, вообще говоря, до начала операции встречи следует предусмотреть коррекции орбиты ОС с целью управления фазой. В процессе эксплуатации МКС регулярно проводятся коррекции для поддержания рабочей высоты ее орбиты. Выбор моментов проведения этих коррекций практически обеспечивает заданную фазу на момент запуска АК с достаточной точностью [14]. Нарушения режима формирования фазы возникают при необходимости внеплановой коррекции орбиты ОС для уклонения от столкновения с космическим «мусором». В таком случае приходится использовать отработанные в практике полетов схемы встречи продолжительностью 1…3 сут.
Для оценки границ диапазона фаз используется линеаризованная модель относительного движения КА. Верхнюю границу фазы определим из условия, что орбита фазирования для заданной продолжительности встречи совпадает с орбитой выведения. В этом случае первый перелет вырождается в коррекцию относительного движения по бинормали, реализуемую в узле, а второй плоский перелет с фиксированной скоростью в точке прицеливания определяется по методу распределения импульсов оптимального межорбитального перелета между непересекающимися орбитами. Для определения нижней границы диапазона разности фаз в качестве орбиты фазирования следует рассматривать орбиту со средней разностью высот, равной величине относительного эксцентриситета, определяемой величиной скорости в точке прицеливания. Одна из апсид орбиты фазирования касается орбиты ОС в точке прицеливания, другая определяется максимальной разностью высот между АК и ОС на линии хомановских перелетов и равна 4 Vпр /юОС. Здесь Vпр — величина скорости в точке прицеливания, юОС — орбитальная угловая скорость ОС.
На рис. 2 представлены оценки верхней и нижней Ф ( Т ) границ диапазона фаз в функции продолжительности перелета Т . За начало отсчета Т принят момент приложения первого из импульсов программы встречи.
Рис. 2. Границы диапазона оптимальных фаз Ф в функции продолжительности встречи T: 1 — два импульса на подъем орбиты; 2 — орбита выведения; 3 — момент выведения Примечание. Подъем орбиты после 0,5 витка фазир о вания расширяет допустимый диапазон разностей фаз. — верхняя граница диапазона фаз; Ф ( Т ) — нижняя граница диапазона фаз; Т — продолжительность перелета космического аппарата в точку встречи.
Численные оценки для орбит выведения отечественных кораблей с целью встречи с МКС определяют скорость уменьшения верхней границы диапазона как 13° за виток. Принимая величину прицельной скорости V пр = 12,5 м/с, находим, что скорость уменьшения нижней границы ~1,4° за виток. В настоящее время для реализации «быстрой» стыковки используется навигационное обеспечение полета АК по данным измерений с НИП, обрабатываемых ЦУП. Аппаратура АСН-К, установленная на АК, проходит тестовые испытания. Для формирования вектора состояния АК проводятся измерения в зоне видимости первого полетного витка после выведения. Уставки для режима сближения закладываются в навигационный блок АК в зоне видимости НИП второго витка. В качестве момента начала маневрирования естественно принять конец зоны видимости на втором витке. Задержка исполнения программы встречи уменьшает диапазон оптимальных фаз на момент выведения.
Рассмотрим характерный пример. Пусть в качестве продолжительности встречи, отсчитываемой от момента отделения АК от ракеты-носителя (РН), принято четыре витка. Диапазон допустимых фаз на момент выведения Э в = 0 определяется как отрезок [ Ф ( Т ) , ] для Т = 4 витка, как показано на рис. 2. Примем, что реализация импульсов собственно программы встречи начинается за 2,25 витка до расчетного момента встречи Эпр, т. е. с задержкой Э 1 - Э в = 1,75 витка. Величина диапазона допустимых фаз АФ 0 на момент выведения определяется значением АФ для Т = Эпр - Э 1 = 2,25 витка, и уменьшается из-за задержки примерно на 19° по сравнению с диапазоном, определенным для Т = 4 витка. Для фазы Ф0, находящейся внутри диапазона АФ0 на момент выведения, маневр встречи начинается с фазы, находящейся внутри диапазона допустимых фаз, определенного для Э 1 = 1,75 витка.
Для начальной фазы Ф1 на рис. 2, находящейся вне диапазона АФ0, после пассивного полета по орбите выведения к моменту Э 1 = 1,75 витка фаза уходит за нижнюю границу Ф ( Т ). Предлагается [3] на первом витке полета АК уменьшить скорость изменения фазы так, чтобы к началу операции встречи разность фаз оставалась в диапазоне, определенном для продолжительности встречи Т = 2,25 витка. Уменьшение скорости изменения фазы достигается подъемом средней высоты орбиты АК. Реализуется следующая стратегия полета. После прохождения зоны видимости первого витка, где производятся измерения орбиты АК, до начала зоны видимости второго витка реализуется двухимпульсный маневр на подъем орбиты, в результате которого АК переходит на промежуточную орбиту фазирования. На рис. 2 представлена зависимость фазы Ф1 от последовательного исполнения импульсов маневра. Двухимпульсный маневр с трансверсальными импульсами рассчитывается ЦУП по известным параметрам орбиты ОС и номинальным параметрам орбиты выведения. В зоне видимости второго витка на борт АК закладывается вектор состояния, полученный по измерениям на первом витке с учетом реализованного маневра на подъем орбиты.
Предложенная стратегия полета практически не приводит к увеличению затрат топлива на операцию для фазы Ф1 по сравнению с вариантом, когда начальная разность фаз равна Ф0, и маневр подъема орбиты АК не нужен. Стратегия реализована в нескольких полетах кораблей «Прогресс М-М» и «Союз ТМА» с навигационной поддержкой от службы радиоконтроля орбиты (РКО) и ЦУП до перехода на навигационное обеспечение от АСН.
Результаты реализациии моделирования «быстрой» встречи
Рассмотрим реализацию описанной стратегии на примере типовой встречи продолжительностью четыре витка корабля «Союз ТМА-15М» с МКС 24 ноября 2014 г. Отделение АК от РН — в 00 ч 10 мин 02 с. Начальная фаза на момент отделения — 25,76°. Поскольку фаза на момент отделения АК от РН находится вне диапазона допустимых фаз АФ 0 , целесообразно исполнение маневра подъема орбиты АК на первом витке полета. Циклограмма основных событий встречи представлена на рис. 3.
Предварительная программа наведения, полученная ЦУП на основе априорной информации о номинальной орбите выведения корабля «Союз ТМА-15М», приведена в табл. 1.
Таблица 1
Предварительная программа наведения
|
Время вкл., ч:мин:с |
Виток |
Аргумент широты, ° |
Импульс, м/с |
Курс, ° |
Тангаж, ° |
|
00:46:10 |
1 |
229,3 |
36,11 |
0 |
0,00 |
|
01:29:55 |
2 |
44,4 |
30,11 |
0 |
0,00 |
|
02:05:05 |
2 |
183,8 |
7,00 |
0 |
0,00 |
|
02:35:28 |
2 |
303,7 |
7,00 |
0 |
0,00 |
|
03:50:41 |
3 |
239,8 |
1,78 |
0 |
–0,14 |
|
04:36:03 |
4 |
58,2 |
22,24 |
0 |
–1,73 |
|
05:22:14 |
4 |
239,9 |
12,50 |
0 |
0,00 |
Прежде всего отметим, что компоненты импульсов по бинормали к орбите отсутствуют, поскольку фактическая ошибка по наклонению определяется по результатам измерений.
Далее, два трансверсальных импульса (36,11 и 30,11 м/с) на подъем орбиты, реализуемые на первом и втором витках, в сумме требуют более половины топлива, отводимого на всю операцию. Это обусловлено коротким интервалом изменения фазы (примерно виток) между началом маневра на подъем орбиты АК и концом зоны видимости второго витка, когда начинается маневрирование по фактическим параметрам АК.
Программа наведения для встречи, рассчитанная и реализованная в автоматическом режиме функционирования СУД, начинающемся с момента начала маневрирования ТН (35 мин от начала второго витка), представлена в табл. 2.
Таблица 2
Программа наведения автоматического режима встречи
|
Время вкл., ч:мин:с |
Аргумент широты, витки от Т н |
Импульс, м/с |
Курс, ° |
Тангаж, ° |
|
02:23:30 |
0,3399 |
6,36 |
337,52 |
–0,46 |
|
03:06:17 |
0,8079 |
10,64 |
22,48 |
0,46 |
|
03:50:49 |
1,2949 |
7,61 |
0,00 |
0,00 |
|
04:36:31 |
1,7949 |
20,11 |
0,00 |
0,00 |
|
05:22:14 |
2,2949 |
12,50 |
0,00 |
0,00 |
Сравнивая данные табл. 1 и 2, следует отметить перераспределение величин импульсов, реализуемых после приложения первых двух импульсов, решающих задачу подъема орбиты АК. Это обусловлено использованием в расчетах для табл. 2 фактической орбиты выведения вместо номинальной, которая использовалась для результатов табл. 1. Траектория относительного движения в орбитальной системе координат МКС выделена на рис. 4 черным цветом с надписью «4 витка — РКО».
Рис. 3. Циклограмма четырехвитковой встречи с навигационным обеспечением от радиоконтроля орбиты
Примечание. НИП — наземный измерительный пункт; V — импульсы; РКО — радиоконтроль орбиты; ВС — векторы состояния; T — момент времени.
Рис. 4. Траектории сближения в орбитальной системе координат Международной космической станции
Примечание. РКО — радиоконтроль орбиты; V — импульсы;
АСН-К — аппаратура спутниковой навигации.
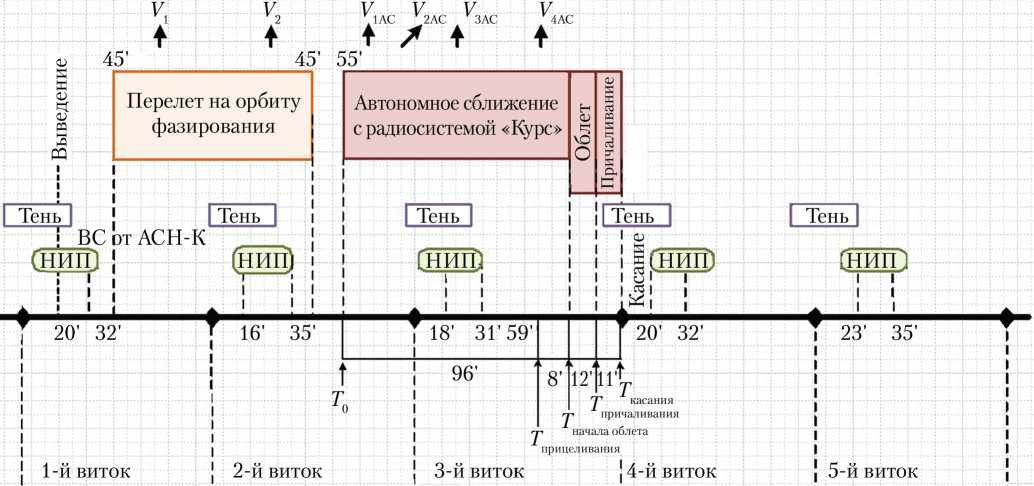
Представляют интерес результаты моделирования встречи по измерениям от АСН-К, поступающим на вход навигационного блока. Поскольку начальная фаза 25,76° на момент отделения «Союз ТМА-5М» находится в диапазоне допустимых фаз АФ0 для продолжительности встречи четыре и три витка, рассмотрим эти варианты встречи с навигационным обеспечением от АСН. Циклограмма основных событий трехвитковой встречи представлена на рис. 5.
Как следует из циклограммы, расчет и реализация программы встречи начинаются после проведения достаточного количества измерений АСН и построения на борту опорной ОСК примерно через 20 мин после отделения АК от РН. Для формирования орбиты фазирования отведен виток полета.
Расчетное начало маневрирования с поддержкой от радиоаппаратуры «Курс» назначается за 96 мин до момента прицеливания (расчетной точки встречи).
Результаты расчета программы трехвит-ковой встречи представлены в табл. 3.
Таблица 3
Программа наведения для трехвитковой встречи с навигацией от аппаратуры спутниковой навигации на корабле
|
Время вкл., ч:мин:с |
Аргумент широты, витки от Т н |
Импульс, м/с |
Курс, ° |
Тангаж, ° |
|
00:52:05 |
0,4436 |
14,04 |
341,57 |
–0,30 |
|
01:34:16 |
0,9122 |
7,26 |
18,43 |
0,30 |
|
02:16:59 |
1,3870 |
35,64 |
0,00 |
0,00 |
|
03:02:00 |
1,8870 |
48,14 |
0,00 |
0,00 |
|
03:47:00 |
2,3870 |
12,50 |
0,00 |
0,00 |
Следует заметить, что начальная фаза по выведению близка к верхней границе диапазона оптимальных фаз, поэтому орбита фазирования близка к орбите выведения, и более 80% расхода топлива приходится на традиционный автономный участок сближения с радиосистемой «Курс». Траектория перелета в ОСК МКС на рис. 4 выделена красным цветом и надписью «3 витка — АСН-К».
Циклограмма четырехвитковой встречи с навигационным обеспечением от АСН-К отличается от циклограммы трехвитковой встречи, увеличенной на виток продолжительностью пассивного полета по орбите фазирования.
V V V
,1АС 2АС ЗАС
V
1-й виток
96'
Т
3-й виток прицеливания
]4-й виток
Т р касания гр причаливания начала облета
| Тень |
I Тень |
!|Шп) I и I I
Шип) '
1 !
18' 31'59'
20' 32'
Автономное сближение с радиосистемой «Курс»
Перелет на орбиту фазирования
16' 35'
Тень| | Тень |
! ВС от АСН-К
I Тень |
ШЙП)
I I I I
Ж I I
23' 35'
2-й виток
5-й виток
Рис. 5. Циклограмма трехвитковой встречи с навигационным обеспечением от аппаратуры спутниковой навигации на корабле Примечание. НИП — наземный измерительный пункт; V — импульсы; ВС — векторы состояния; АСН-К — аппаратура спутниковой навигации; T — момент времени.
4 АС
Результаты расчета программы четырех-витковой встречи представлены в табл. 4.
Таблица 4
Программа наведения для четырехвитковой встречи с навигацией от аппаратуры спутниковой навигации на корабле
|
Время вкл., ч:мин:с |
Аргумент широты, витки от Т н |
Импульс, м/с |
Курс, ° |
Тангаж, ° |
|
00:51:38 |
0,4340 |
38,52 |
354,73 |
–0,10 |
|
01:35:53 |
0,9213 |
32,11 |
5,27 |
0,10 |
|
03:51:24 |
2,4133 |
10,41 |
0,00 |
0,00 |
|
04:36:49 |
2,9133 |
22,91 |
0,00 |
0,00 |
|
05:22:14 |
3,4133 |
12,50 |
0,00 |
0,00 |
Отметим, что для продолжительности че-тырехвитковой встречи орбита фазирования располагается выше, чем для трехвитковой встречи, и топливо расходуется более равномерно. Траектория перелета в ОСК МКС на рис. 4 выделена синим цветом и надписью «4 витка — АСН-К».
Выводы
В процессе модернизации отечественных кораблей реализуется тенденция к переносу функций управления сближением от наземных служб на борт АК, обусловленная как созданием новых бортовых алгоритмов наведения, позволяющих рассчитать программу полета от выведения до расчетного момента встречи, так и установкой на АК АСН, позволяющей определить текущие параметры орбиты корабля без использования НИП.
Введенные в состав программного обеспечения СУД алгоритмы управления позволяют обеспечить сближение модернизированных кораблей с МКС с момента выведения до механической стыковки как по традиционным схемам встречи продолжительностью 1…3 сут, так и по схемам «быстрой» встречи за три-четыре полетных витка. Для навигационного обеспечения операции сближения могут использоваться как измерения от НИП, так и измерения от АСН на кораблях и МКС. Расчет программы встречи производится на борту корабля, и процесс сближения реализуется автономно, без вмешательства наземных служб. Минимальный контроль ЦУП может быть предусмотрен на этапе причаливания к МКС.
Список литературы Новые возможности автономной системы управления модернизированных кораблей «Союз» и «Прогресс» для реализации «быстрой» встречи с МКС
- Легостаев В.П., Микрин Е. А., Орловский И.В., Борисенко ЮА., Платонов В.Н., Евдокимов С.Н. Создание и развитие систем управления движением транспортных космических кораблей «Союз» и «Прогресс»: опыт эксплуатации, планируемая модернизация//Труды МФТИ. 2009. Т. 1. № 3. С. 4-13.
- Бранец В.Н., Шмыглевский И.П. Введение в теорию бесплатформенных инерциальных навигационных систем. М.: Наука, 1992. 280 с.
- Муртазин РФ. Схемы ускоренного доступа к орбитальной станции для современных космических кораблей//Космические исследования. 2014. Т. 52. Вып. 2. С. 162-175.
- Дзесов Р.А., Жуков В.Н., Павлов В.П. Практические аспекты определения траектории МКС для обеспечения автоматической стыковки АТѴ с М КС/Сб. трудов XVI Санкт-Петербургской международной конференции по интегрированным навигационным системам. СПб.: ГКНЦ «Электроприбор», 2009. С. 253 259.
- Микрин Е.А., Михайлов М.В., Орловский И.В, Рожков С.Н., Семенов А.С. Автономная система навигации модернизированных кораблей «Союз» и «Прогресс»/Сб. трудов XX Санкт-Петербургской международной конференции по интегрированным навигационным системам. СПб.: ГКНЦ «Электроприбор», 2013. С. 304-309.
- Микрин Е.А., Михайлов М.В., Орловский И.В, Рожков С.Н., Семенов А.С., Федулов Р.В. Эксплуатация АСН-М МКС, ее характеристики и возможности. Перспективы использования АСН на КА «Союз» и «Прогресс»/Сб. трудов XVI Санкт-Петербургской международной конференции по интегрированным навигационным системам. СПб.: ГКНЦ «Электроприбор», 2009. С. 265 272.
- ГОСТ 25645.115-84. Атмосфера Земли верхняя. Модель плотности для баллистического обеспечения полетов искусственных спутников Земли. М.: Издательство стандартов, 1991 (переиздание с изменениями). 31с.
- Бажинов И.К., Гаврилов В.П., Ястребов ВД. и др. Навигационное обеспечение полета орбитального комплекса «Салют-6» -«Союз» -«Прогресс». М.: Наука, 1985. 376 с.
- Бажинов И.К., Ястребов ВД. Навигация в совместном полете космических кораблей «Союз» и «Аполлон». М.: Наука, 1978. 227 с.
- Ермилов Ю.А., Иванова Е.Е., Пантю-шин С.В. Управление сближением космических аппаратов. М.: Наука, 1977.448 с.
- Shapiro М. An attenuated intercept satellite rendezvous system//ARS J. 1961. V.31. № 12. Pp. 1733-1744.
- Ильин B.A., Кузмак Г.Е. Оптимальные перелеты космических аппаратов. М.: Наука, 1976. 744 с.
- Кузмак Г.Е. Исследование оптимальных многоимпульсных перелетов между близкими околокруговыми некомпланарными орбитами//Труды ЦАГИ. 1969. Вып. 1120. 44 с.
- Мельников Е.К., Смирнов А.И. Метод решения многоцелевой задачи управления движением околоземной космической станции//Космонавтика и ракетостроение. 2009. Вып. 2 (55). С. 69-78.
