Новый алгоритм технического диагностирования гребных электродвигателей

Автор: Серебряков Артм Владимирович, Стеклов Алексей Сергеевич, Титов Владимир Георгиевич
Журнал: Вестник Южно-Уральского государственного университета. Серия: Энергетика @vestnik-susu-power
Рубрика: Электромеханические системы
Статья в выпуске: 2 т.17, 2017 года.
Бесплатный доступ
Показано одно из направлений, определяющих повышение качества контроля и диагностики технического состояния электрооборудования судов. Рассматривается новый алгоритм диагностирования технического состояния гребных электродвигателей, основанный на представлении гребного электродвигателя изменяющимся объектом, эксплуатация которого заключается в трансформации структуры объекта под влиянием различных факторов. Определены параметры диагностирования гребных электродвигателей. Созданы функциональная и математическая модели диагностирования гребных электродвигателей. Разработанный алгоритм диагностирования гребного электродвигателя позволяет обнаруживать неисправности с заданной глубиной диагностирования. Данный алгоритм можно использовать в составе экспертных систем контроля технического состояния судовых электроэнергетических установок. Предложен комплексный подход к построению алгоритма технического диагностирования гребных электродвигателей на основе логической модели диагностирования. Отличительной особенностью и новизной предлагаемого алгоритма диагностирования гребного электродвигателя является то, что он позволяет учитывать взаимное влияние диагностических признаков на состояние объекта и с единых методологических позиций оценивать техническое состояние любого гребного электродвигателя.
Диагностика, алгоритм, гребной электродвигатель, математическая модель, функциональная модель
Короткий адрес: https://sciup.org/147158406
IDR: 147158406 | УДК: 621.313.13 | DOI: 10.14529/power170211
New technological diagnostics algorithm of required electric motors
The paper illustrates one of the directions determining the improvement of the quality of the ship electrical equipment technical condition control and diagnostics. We consider a new algorithm to diagnose the technical condition of propulsion motors based on the representation of a propulsion motor as a variable object the operation of which consists in the object structure transformation under the influence of various factors. The parameters of propulsion motors diagnostics are determined. Functional and mathematical models for diagnosing propellers have been created. The developed algorithm for propulsion motor diagnostics allows detecting faults with a given diagnosis depth. This algorithm can be used as a part of expert systems to monitor the technical condition of ship electric power plants. A complex approach to the construction of an algorithm for the propulsion motors technical diagnostics of based on the logical diagnosis model is proposed. A distinctive feature and novelty of the proposed algorithm for propulsion motor diagnostics is that it allows one to take into account the mutual influence of diagnostic features on the object state and assess the technical condition of any propulsion motor from consistent methodological positions.
Текст научной статьи Новый алгоритм технического диагностирования гребных электродвигателей
Большинство отказов гребных электродвигателей (ГЭД), влияющих на безопасную эксплуатацию судов, зарождаются и проявляются именно в процессе эксплуатации, что требует наличия эффективной бортовой системы диагностики, определяющей техническое состояние судовой электроэнергетической установки (СЭУ) в режиме реального времени непосредственно на борту судна [1–8].
В настоящее время существует несколько видов диагностирования электродвигателей:
– контроль состояния обмоток статора с помощью анализа посланных на обмотку импульсов различных видов;
– вибрационный контроль;
– контроль параметров электромагнитного поля.
Анализ параметров магнитного поля в воздушном зазоре и исследование гармонического состава напряжений и токов электрического двигателя позволяют сделать заключение о его техническом состоянии [9–10].
При вибрационном контроле может исследоваться сигнал вибрации как во временной, так и в частотной областях [11].
Методология диагностирования гребных электродвигателей
Наиболее предпочтительными методами являются методы, основанные на анализе параметров работающего оборудования, а именно токов, напряжений и т. д. Использование данных методов возможно без непосредственного доступа к диагностируемой машине.
Предполагаемый подход к диагностированию гребных электродвигателей включает в себя следующие этапы:
– построение логической модели ГЭД;
– построение математической модели ГЭД на основе логической модели;
– математическая интерпретация зависимостей между входящими в модель блоками;
– составление таблицы неисправностей (ТН);
– преобразование ТН;
– создание способа диагностирования ГЭД на основе полученных данных.
Для каждого вида судового электрооборудования можно указать ряд параметров и (или) признаков, характеризующих техническое состояние и дефекты (параметры, выраженные электрическими величинами, – напряжение, ток, частота, сопротивление и т. п.; параметры, выраженные неэлектрическими величинами, – температура, виброскорость, и т. п.). В зависимости от применяемого метода диагностирования используются те или иные из них, называемые диагностическими параметрами и (или) признаками [12].
Определение диагностических признаков (ДП) формальными методами предполагает построение и анализ диагностической модели объекта. Такие методы позволяют выбрать ДП, достаточные или необходимые для проведения соответствующего вида диагностирования: проверки исправности, работоспособности, функционирования, поиска дефекта [13, 14].
Выбор совокупности диагностических параметров является ответственной задачей разработки системы технического диагностирования. При выборе ДП учитываются их информативность, доступность для измерения и контроля, стоимость и время измерения. Предпочтение отдается параметрам, имеющим прямую функциональную связь с техническим состоянием (ТС) диагностируемого элемента или объекта, обладающим большей информативностью, относительно легко и по возможности непосредственно измеряемым простыми средствами.
Контролировать все параметры, определяющие техническое состояние сложных электромеханических объектов (полный контроль), практически невозможно, поэтому СТД контролируют некоторое множество наиболее существенных параметров.
При отсутствии количественных показателей безотказности элементов выбор диагностических параметров ГЭД может быть выполнен путем опроса специалистов (экспертов). С помощью метода экспертных оценок, используя опыт, знания и интуицию высококвалифицированных специалистов, можно, например, построить упорядоченный ряд параметров, определяющих техническое состояние элементов ГЭД. Самыми информативными для определения неисправностей ГЭД, по мнению экспертов, являются параметры [15–19]:
-
– токи в фазах ( I );
-
– напряжение по фазам ( U );
-
– скорость вращения ротора ( n );
-
– сопротивление изоляции на корпус ( R из );
-
– температура обмоток статора ( t обм );
-
– температура масла редуктора ( t масла );
-
– вибрация ГЭД.
Для обеспечения регистрации диагностических параметров в ГЭД предусмотрены штатные датчики температуры Pt-100 в обмотках статора. Дополнительно ГЭД оснащается датчиками тока, напряжения и сопротивления изоляции, установленными в каждой фазе; датчиком температуры Pt-100 масла редуктора; датчиком скорости ротора; датчиком виброскорости на корпусе ГЭД.
На основе полученного ряда параметров (признаков) с учетом расположения датчиков может быть составлена функциональная модель ГЭД.
Функциональная модель ГЭД представлена на рис. 1.
При описании ОД представим гребной электродвигатель изменяющимся объектом, эксплуатация которого заключается в трансформации структуры объекта под влиянием различных факторов. Эти факторы составляют следующие совокупности: R – совокупность состояний r объекта; V – совокупность моментов времени v ; Y и W – совокупность входных y и выходных w сигналов.
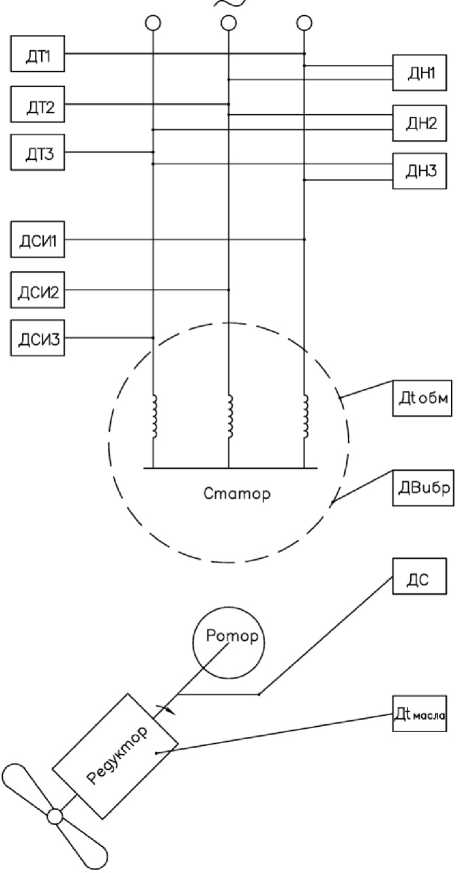
Рис. 1. Функциональная модель диагностирования ГЭД: ДТ1–ДТ3 – датчики тока в 1, 2, 3 фазах; ДСИ1–ДСИ3 – датчики сопротивления изоляции в 1, 2, 3 фазах; ДН1–ДН3 – датчики напряжения в 1,2,3 фазах; Дtобм – датчик температуры обмоток статора; Д Вибр – датчик вибрации ГЭД; Дt масла – датчик температуры масла редуктора; ДС – датчик скорости вращения ротора
Математическое описание объекта будет представлено как соотношение компонентов [20]:
r = ƒ ( y , w , v , D’ , D , M’ , M) , (1) где r ∈ R , y ∈ Y , w ∈ W , v ∈ V , D’ ( v , y , r ) = Q’ , D ( v , y , r )= Q – взаимосвязи, представляющие трансформацию структуры объекта под влиянием различных факторов; M’ ( v , y , n )= u’ , M ( v , y , n ) = u – выходные сигналы, отображающие формирование выходного сигнала под влиянием различных факторов. Индекс ( ’ ) учитывает действие внутренних факторов.
Для определения исправности или неисправности ГЭД необходимо пользоваться совокупностью различных состояний K. Принадлежащие ему совокупности Kj (где j = 0, 1, 2,…, N) отображают состояния kj ГЭД, выражающие возможные его состояния ri. Соответственно при K0 (при j = 0) объект исправен, а при Kj (при j ^ 0) - неисправен из-за возникновения повреждения в j-й части объекта.
Функциональные зависимости между входными и выходными командами ГЭД не нуждаются в строгом контроле.
Необходимо лишь получить результирующее техническое состояние элемента по итогам анализа его сигналов вида «в допускаемом интервале – не в допускаемом интервале». Тогда получаем итог влияния множества H j = ( D j , D’ j , M j , M’ j ) уравнения (1), воспроизводящий функцию критериев функционирования гребного электродвигателя. Каждый j -элемент ОД реализует лишь один алгоритм работы. Тогда выходной сигнал имеет вид:
W j = F j a K, (2) где F j – функция критерия работоспособности j -элемента, выражаемая логическим умножением внешних и внутренних аргументов:
F j = H j a j A y 2 a a y j . (3)
При всех допустимых входных сигналах и функционирующем состоянии блока его выход W j будет допустим. Если всё множество элементов математической модели исправно, т. е. если логическое умножение W 1 a W 2 a W 3 a ... a W N равно 1, то и весь ГЭД работоспособен.
Для получения математической модели диагностирования ГЭД каждый элемент заменяется логическим звеном, содержащим один выходной сигнал и соответствующие входные сигналы для этого выхода. Сигналы между элементами ОД являются одиночными функциональными сигналами.
Входные и выходные сигналы обозначены ребрами с символами X j и Z j . Параметры объекта представлены узлами графа с индексами j , где j – индекс параметра математической модели, на вход (с выхода) которого действуют (выходят) сигналы.
На основании изложенного разработана математическая модель ГЭД как объекта диагностирования.
Входные внешние сигналы X 1 – X n соответствуют входным сигналам, получаемым с датчиков системы диагностирования.
Внешний выходной сигнал Z 14 соответствует совокупности состояний ГЭД.
Обозначим совокупность всех исправностей k 0 и неисправностей k j , j = 1, 2,…, N , гребного электродвигателя символом E , а символом П – совокупность всех проверок π g , g = 1, 2,…, n . Тогда таблица, строки которой представляют собой элементарные проверки π g , а столбцы – технические состояния k j элементов ОД, а клеткам j , g , находящимся на пересечениях строк π g и столбцов k , соответствуют итоги Tj g проверок, будет представлять собой таблицу неисправностей ОД.
Совокупность П всех проверок совпадает с количеством логических элементов.
Заполнение ТН происходит согласно результатам решения логических уравнений (3) и (2) для каждого элемента математической модели:
Z 1 = e1 a X 1 Z 7 ; Z 2 = e 2 a X 2 Z 8 ;
Z 3 = e 3 a X 3 Z 9 ; Z 4 = e 4 a X 1 Z 1 Z 10;
Z 5 = e 5 A X 2 Z 2 Z 10; Z 6 = e 6 A X 3 Z 3 Z 10 ;
Z 7 = e 7 a X 1 X 2; Z 8 = e 8 a X 2 X 3;
' Z 9
= e 9 A X 1 X 3 ; Z 10
= e 10 A X 4 Z 7 Z 8 Z 9 ;
Z 11 = e 11 A X 5 ;
Z 12 = e 12 A X 6 Z 1 Z 2 Z 3 Z 7 Z 8 Z 9 Z 10 ;
Z 13 = e 13 A X 7 Z 12 ;
Z 14 = e 14 A Z 1 Z 2 Z 3 Z 4 Z 5 Z 6 Z 7 Z 8 Z 9 Z 10 Z 11 Z 12 Z 13 .
На рис. 2 представлена математическая модель диагностирования гребного электродвигателя.
ТН позволяет выявить и различить неисправность любого i-го элемента математической модели, поскольку все столбцы ei, i =0, 1, 2,…, N, таблицы отличаются от столбца e0, а также все столбцы таблицы, соответствующие дефектам элемен- тов, попарно различны.
Проблему разработки алгоритма диагностирования можно сформулировать следующим образом. Задана совокупность K возможных технических состояний ОД. Компонентами совокупности K являются исправные и неисправные состояния объекта. Задана требуемая глубина диагностирования объекта. Следует определить наименьшее число элементарных проверок π g и их последовательность, реализующих требуемую глубину диагностирования объекта.
Общее решение данной проблемы может быть выполнено по ТН, столбцы которой соответствуют совокупности технических состояний объекта – исправному k 0 и неисправным k j состояниям. Совокупность П допустимых проверок π g объекта, соответствующих строкам ТН, вычисляется из условия достижения заданной глубины диагностирования объекта.
Чтобы обеспечить заданную глубину диагно- стирования, совокупность проверок алгоритма диагностирования должна позволять обнаруживать и различать заданные дефекты объекта.
Построим алгоритм диагностирования для ГЭД. Алгоритм диагностирования для ГЭД в форме ориентированного графа представлен на рис. 3.
Внутренние узлы графа представляют собой проверки (выходные координаты Z j ) технического состояния j -х элементов логической модели ОД, конечные узлы графа отражают те j -е элементы, дефект которых выявлен, а ориентированные дуги графа соответствуют результату проверки технического состояния j -го элемента, из вершины которого исходят рёбра. Для наглядности конечные узлы графа изображены квадратами с номерами
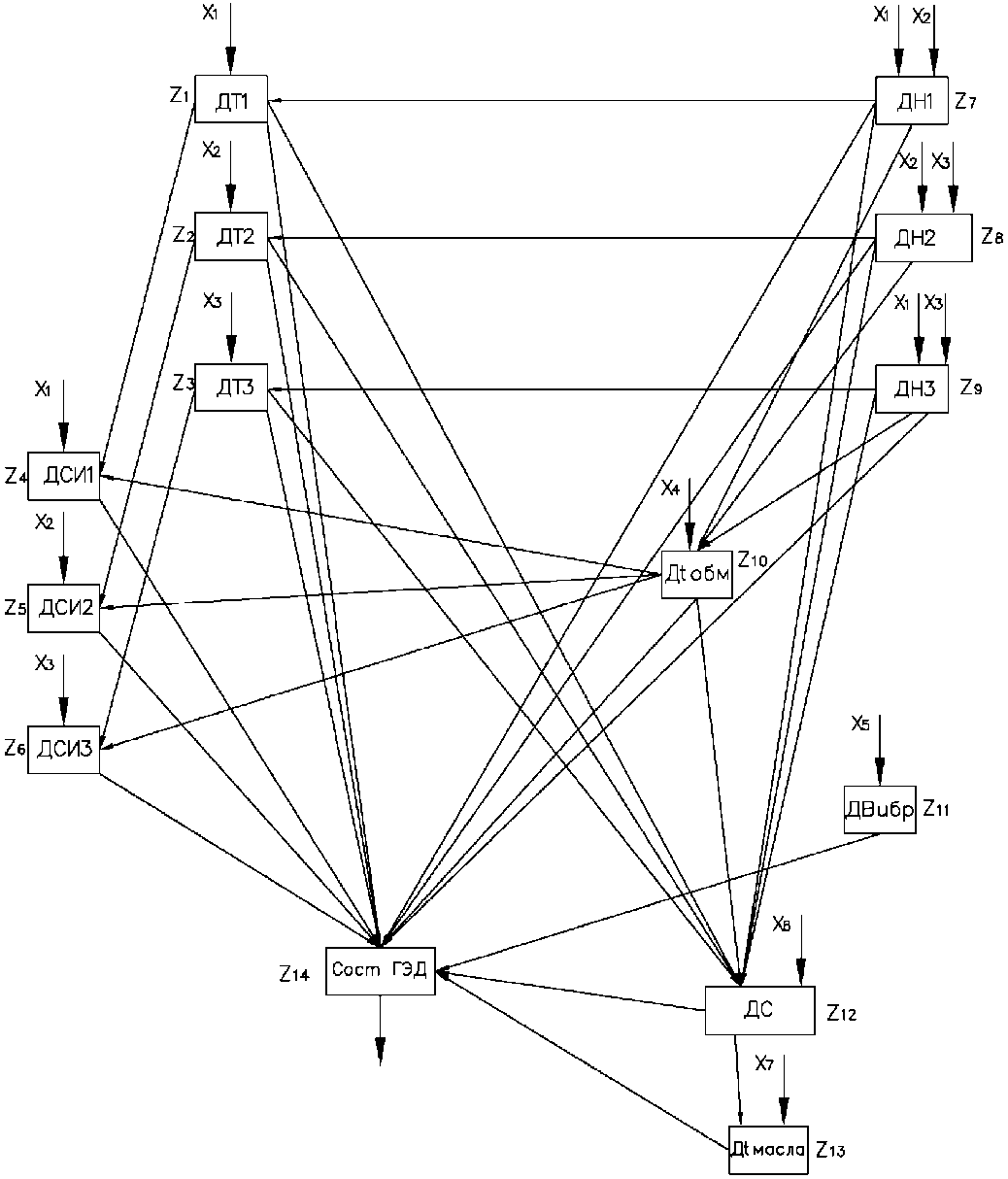
Рис. 2. Математическая модель диагностирования ГЭД
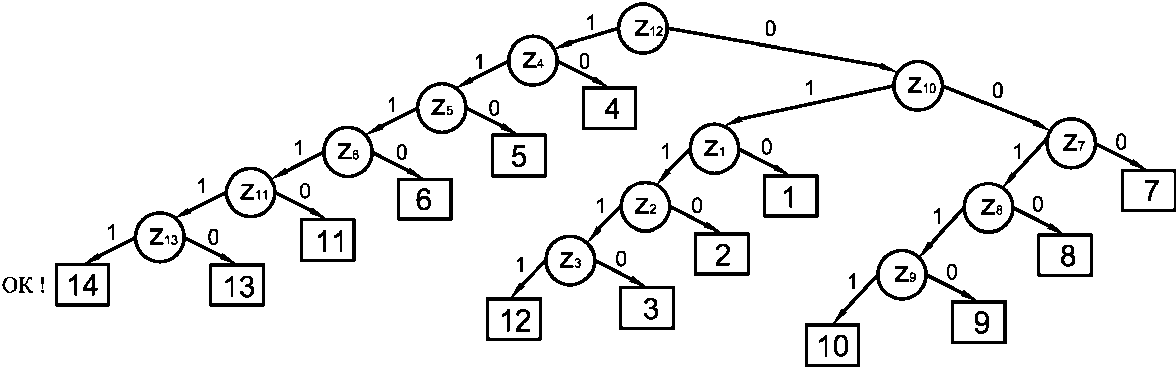
Рис. 3. Алгоритм диагностирования ГЭД элементов, неисправности которых выявлены, а над рёбрами указывается исправное (1) или неисправное (0) техническое состояние j-го элемента, из вершин которого исходят рёбра.
Выявление наименьшего числа проверок ОД создаёт возможность для упрощения интеграции в систему технической диагностики, поскольку значительно уменьшает количество элементов, требующих проверки их технического состояния, без изменения заданной глубины диагностирования.
Главной отличительной особенностью и новизной предлагаемого алгоритма диагностирования ГЭД является то, что он позволяет учитывать взаимное влияние диагностических признаков на состояние объекта и с единых методологических позиций оценивать техническое состояние любого ГЭД.
Выводы
Предложен новый алгоритм диагностирования технического состояния гребных электродвигателей, основанный на представлении ГЭД изменяющимся объектом, эксплуатация которого заключается в трансформации структуры объекта под влиянием различных факторов. Разработанный алгоритм диагностирования ГЭД позволяет объединять несколько диагностических параметров в едином комплексе, учитывать взаимное влияние диагностических признаков на состояние объекта, упростить последующую интеграцию в системы диагностирования, поскольку сокращает количество элементов, требующих проверки их технического состояния, без изменения требуемой глубины диагностирования.
Данный алгоритм можно использовать в экспертной системе контроля технического состояния судовых электроэнергетических установок.
Список литературы Новый алгоритм технического диагностирования гребных электродвигателей
- Patel, M.R. Shipboard Electrical Power Systems CRC Press/M.R. Patel. -Taylor & Francis Group, 2012. -370 p.
- Разработка и внедрение интеллектуальных систем диагностирования технического состояния электрического оборудования/С.И. Лукьянов, А.С. Карандаев, А.С. Сарваров и др.//Вестник Магнитогорского государственного технического университета им. Г.И. Носова. -2014. -№ 1 (45). -С. 129-134.
- Барков, А.В. Интеллектуальные системы мониторинга и диагностики машин по вибрации/А.В. Барков, Н.А. Баркова//Труды Петербургского энергетического института повышения квалификации Минтопэнерго Российской Федерации и Института вибрации США. -СПб., 1999. -Вып. 9.
- Kryukov, O.V. Intelligent electric drives with IT algorithms/O.V. Kryukov//Automation and Remote Control. -2013. -Vol. 74, no. 6. -P. 1043-1048 DOI: 10.1134/S0005117913060143
- Babichev, S.A. Automated monitoring system for drive motors of gas-compressor units/S.A. Babichev, P.A. Zakharov, O.V. Kryukov//Automation and Remote Control. -2011. -Vol. 72, no. 1. -P. 175-180 DOI: 10.1134/S0005117911010176
- Kryukov, O.V. Methodology and tools for neuro-fuzzy prediction of the status of electric drives of gas-compressor units/O.V. Kryukov//Russian Electrical Engineering. -2012. -Vol. 83, no. 9. -P. 516-520 DOI: 10.3103/S1068371212090064
- Kryukov, O.V. Development of CAC systems for autonomous wind-energy installations/O.V. Kryukov, V.V. Titov//Automation in the industry. -2009. -No. 4. -P. 35-37.
- Milov, V.R., Intellectual management decisions support in gas industry/V.R. Milov, B.A. Suslov, O.V. Kryukov//Automation and Remote Control. -2011. -Vol. 72, no. 5. -P. 1095-1101 DOI: 10.1134/S0005117911050183
- Innovative sol tions in design of systems of compressor station illumination/N.N. Kalnynsh, O.V. Kryukov, I.E. Rubtsova, E.Yu. Ryabkova//Automation in the industry. -2011. -No. 9. -P. 19-21.
- Подковырин, Д.С. Нейро-нечеткая модель диагностирования технического состояния синхронного генератора/Д.С. Подковырин//Главный энергетик. -2015. -№ 11-12. -C. 55-60.
- Korobeinikov, A.B. Analysis of existing methods for diagnostics of electric motors and perspectives of their development/A.B. Korobeinikov, A.S. Sarvarov//Вестник Магнитогорского государственного технического университета им. Г.И. Носова. -2015. -№. 1. -С. 4-9.
- Дарьенков, А.Б. Автономная высокоэффективная электрогенерирующая станция/А.Б. Дарьенков, О.С. Хватов//Труды Нижегородского государственного технического университета им. Р.Е. Алексеева. -2009. -Т. 77. -С. 68-72.
- Стеклов, А.С. Cистема диагностики технического состояния судового синхронного генератора/А.С. Стеклов, В.Г. Титов, А.В. Серебряков//Труды Нижегородского государственного технического университета им. Р.Е. Алексеева. -2016. -№ 1. -С. 60-64.
- Крюков, О.В. Метод и система принятия решений по прогнозированию технического состояния электроприводных газоперекачивающих агрегатов/О.В. Крюков, А.В. Серебряков//Электротехнические системы и комплексы. -2015. -№ 4 (29). -С. 35-38.
- Калявин, В.П. Надежность и диагностика элементов электроустановок/В.П. Калявин, Л.М. Рыбаков. -СПб.: Элмор, 2009. -336 с.
- Questions related to the development of metro-logical assurance in the design of Gazprom facilities/S.N. Kadin, A.P. Kazachenko, O.V. Kryukov, A.V. Reunov//Measurement Techniques. -2011. -Vol. 54, no. 8. -P. 944-952 DOI: 10.1007/s11018-011-9832-7
- Крюков, О.В. Диагностика электромеханической части ветроэнергетических установок/О.В. Крюков, А.В. Серебряков, А.Б. Васенин//Електромеханiчнi I енергозберiгаючi системи. -2012. -№ 3 (19). -С. 549-552.
- Babichev, S.A. Analysis of technical condition and safety of gas-pumping units/S.A. Babichev, E.V. Bychkov, O.V. Kryukov//Russian Electrical Engineering. -2010. -Vol. 81, no. 9. -P. 489-494 DOI: 10.3103/S1068371210090075
- Kryukov, O.V. Unified Monitoring and Control System of Electric Driven Gas Compressor Units/O.V. Kryukov//Advanced Information Technology, Automation Tools and Systems and their Implementation at Russian Enterprises: MNPK Collected Papers, AITA-2011. -М.: Изд-во РАН. -2011. -С. 329-350.
- Стеклов, А.С., Определение степени работоспособности судовых синхронных генераторов с применением искусственных нейро-нечетких сетей/А.С. Стеклов, В.Г. Титов, А.В. Серебряков/Вестник Чувашского университета. -2016. -№ 1. -С. 97-104.
