О математических принципах построения областей виброизоляции

Автор: Горобцов Александр Сергеевич, Рыжов Евгений Николаевич
Журнал: НБИ технологии @nbi-technologies
Рубрика: Технико-технологические инновации
Статья в выпуске: 1 (8), 2013 года.
Бесплатный доступ
В работе, на основе теории устойчивости инвариантных множеств В.И. Зубова, получены новые схемы синтеза систем с виброизолированными областями движения. Сформулированы принципы нелинейной виброзащиты.
Устойчивость, автоколебательный режим, инвариантность, принцип суперпозиции решений, нелинейная виброзащита
Короткий адрес: https://sciup.org/14968468
IDR: 14968468 | УДК: 517.9;
About mathematical principles of vibroprotection domains constructing
Synthesys scheme of aperiodic links is proposed. Nonlinear vibroprotection principles based on V.I. Zubov’s theory of invariant sets are formulated in the paper.
Текст научной статьи О математических принципах построения областей виброизоляции
Основной из актуальных задач при проектировании систем управления является проблема корректного сопряжения генератора как источника питания и исполнительных органов. При этом привод от источника питания к исполнительной части устройства должен, кроме того, сглаживать вибрации от генератора, которые искажают требуемую динамику движения исполнительных органов. Решение этой проблемы является задачей виброизоляции или виброзащищенности пространства состояний исполнительной части устройства. В случае представления задач в виде линейных систем дифференциальных уравнений, решение проблемы опирается на принцип суперпозиции математической модели свободного движения управляющего объекта и управления с обратной связью. В случае нелинейного регулятора принцип суперпозиции решений, как известно, неприменим [2]. Колебательные системы с неидеальным источником энергии можно представлять как систему автономных динамических систем, содержащих подсистемы источника питания, связанных с колебательными системами, вообще говоря, нелинейными обратными связями по полному вектору состояния всей системы в целом. Термин «неидеальный источник» обязан своим происхождением именно формированию контуров нелинейных обратных связей между колебательными подсистемами и источником энергии. При этом поведение колебательных подсистем влияет на динамические характеристики источника. В свою очередь изменение характеристик источника питания влияет на поведение колебательных подсистем.
В данной статье подход к виброизоляции опирается на теорию устойчивости инвариантных множеств, построенной В.И. Зубовым [3].
Схема синтеза
Введем функцию F(xi,x2,™,x2n), повер- хности уровня которой являются односвязными и замкнутыми. Следуя работе [там же], запишем условие инвариантности для одной из поверхностей уровня функции F(x1,x2,...,x2n): ^L^дт + x2i lx--j(F(x))= ф(x)(С - F(x)), тогДа и только тогда, когда x = (x1, x2, „., x2n) удовлетворяет уравнению F (x) = C .
При этом, если положить, что n
^ ( x ) = E P 2 x 2 22 , где P 2 i > 0 - константы и i = 1
F (x) определенно положительна, то и ее полная производная на движениях системы в области Q1 = {x e R2n | F(x) < C} будет определенно положительной функцией, в области П2 = {x e R2n | F(x) > C} — определенно отрицательной , то есть F (x) – функция Ляпунова. Так как поверхность уровня F (x) = С, помимо всего прочего, является инвариантной, то при выполнении условий существования решений задачи Коши и их единственности следует, что траектории, лежащие внутри области фазового пространства, ограниченной этой поверхностью, и вне нее, не могут ее пересекать.
Если данная схема синтеза удовлетворяет теоремам Зубова [3], то задача синтеза имеет положительное решение.
1. Постановка задачи стабилизации произвольного числа свободных апериодических движений
Рассмотрим следующую задачу:
Y ■ Q Y + AY + U ( Y , Y ) = 0 , y n - а У n + « n У п + u n ( Y , Y ) = 0,
Теорема [1]. Пусть будут выполнены условия: 1) система состоит из неидеального источника питания и n – 1 двойных апериодических звеньев; 2) коэффициенты U управления с обратной связью по вектору состояния системы ( ) удовлетворяют следующим соотношениям: а) коэффициенты внутриконтур-ного управления: p2,-2i—1 = a, в2i,2i = ; б) со- ai отношения для коэффициентов обменных уп- равлений
2 α i
P 2i b 2 , P 21
212^1. + 2e2j2L + P2L + P2L = 0 2 222
2αj bi αbij bj b2,12i,21-1 a 2; с) b2 = sa2, где j ji ii i, j=1,2,...,n при i ^ j; 3) в неидеальном источнике устанавливается автоколебательный режим с амплитудой, равной величине полуоси эллипсоида an.
Тогда условия 1)–3) являются необходимыми и достаточными для стабилизации n – 1
n z i = 1
Г >ж a2
V ai
+1 bi 7
^ 1,
t ^i^
Будем искать такое управление с обратной связью, чтобы полная производная функции на движениях системы являлась полиномом четвертой степени по переменным состояния. Поэтому представляется целесообразным искать компоненты, стабилизирующие управление, в виде кубических полиномов: U i ( Y i , Y j , 1Y„ Y j ) = Р 2 , .2м УУ- + в 2 , ;2 , У 3 ' L e 2ij УУ ' L P yy
J== 7 =1 ,
T i *j T где Y = ( У1, y 2,..„ y„), Y = ( yv У2„.„ У n),
Y = ( y i ,у 2 , ™ ,y n ) — вектор состояния, скоростей и ускорений системы соответственно, вектор-функция U = (u , ,u 2 ,...,u n - 1 ) T - искомое стабилизирующее управление с обратной связью. Подсистема с номером n является искомым источником питания. Матрицы M , A – диагональные; A – матрица коэффициентов положительной обратной связи, определяющая неустойчивость процессов при отсутствии управления, где s i 2 = ц 2, при i = 1,2,..., n - 1, S' = w 2 .
апериодических звеньев в их пространствах состояний.
Таким образом, с учетом апериодичности группы процессов а2 > 4ц2, при i = 1,2,..., n – 1 следующие условия являются достаточными для стабилизации n – 1 апериодических звеньев в их пространствах состояний: систе-
ма состоит из неидеального источника питания и n –1 двойных апериодических звеньев; коэффициенты U управления с обратной свя-
зью по вектору состояния системы удовлетворяют соотношениям: коэффициенты внутри-
контурного управления: в 2 i ,2 i - 1 = а 2г , в 2 i ,2 i = ^ ; соотношения для коэффициентов об i менных уп i -
равлений
в 2 i ,2 j
—
i
a ibi + а ib1 R _R b i 2+ b 2 , P 2i2j P 2j2i ,
e 2i2j - 1 = a 2 , где i = 1,2,... , n, S j = ^ j2р b2 = Э 2a2 , j =
1,2,... , n при i ^ j . При выполнении этих условий
0 —a n J
Решение задачи опирается на следую-
щую теорему.
в неидеальном источнике устанавливается автоколебательный режим с амплитудой, равной величине полуоси эллипсоида an .
В частности, если в неидеальном источнике устанавливается автоколебательный режим с амплитудой меньшей величины полуоси an эллипсоида, тогда, по крайней мере в пространстве состояний одного из апериодических звеньев, возникают режимы вибраций в окрестности статического режима, звено теряет апериодичность и выходит на автоколебательный режим [1].
Отсюда вытекают два принципа виброизоляции процессов стабилизации апериодических звеньев, в случае, когда амплитуда установившегося процесса в источнике питания меньше an .
-
1. Для того чтобы обеспечить виброизоляцию процессов стабилизации, достаточно ввести дополнительное апериодическое звено, движения которого поглощают вибрации, вызванные работой неидеального источника питания.
-
2. Для обеспечения виброизоляции процессов стабилизации достаточно, чтобы неидеальный источник питания являлся двухконтурным. Причем оба контура должны быть колебательными.
-
2. Алгоритм нелинейного поглощения вибраций
В случае устройства, работающего на двух колебательных звеньях, в пространстве исполнительного органа происходит демпфирование колебаний. Если динамика исполнительного органа описывается апериодическим звеном второго порядка, то установление автоколебательного режима в пространстве состояний управляющего колебательного контура определяет стабилизацию исполнительного органа в статическом режиме. Не теряя общности рассуждений, полагаем, что статический режим в пространстве исполнительного органа совмещен с началом координат. Заметим, что решение нелинейной задачи ста- билизации апериодического звена второго порядка посредством автогенератора эквивалентно задаче стабилизации двух апериодических звеньев первого порядка при выходе управляющего контура на режим генерации устойчивого автоколебательного процесса. Таким образом, приходим к следующей постановке задачи:
- a yi + ®2 y + u, (y„ yi) + u12 (y„ y2, yi, y2 ) = 0, - a2 y2 + ^ y 2 + u2 ( y 2, y2 ) + u21 ( y„ У2, y„ y2 ) = 0, y2 y
X i=1
y i ( t ) + y ( t ) ^ 1, lim y2(t ) = 0, ^ = ® o .
-
2 2 t >+^ t ^+
2 1 0
a i i )
Согласно полученным достаточным условиям стабилизации, для амплитуды источника следует положить a 2 = Z 2 тогда, полагая в 2 4 = в 42, получаем следующий расчет параметров синтеза.
-
1. Коэффициенты в уравнении движения исполнительного звена - в 41 = а 44 Z t - 2 , - 2 а 44
-
2. Коэффициенты для формирования контура обратной связи для обмена сигналами между неидеальным источником и исполнительным а 22 + а 44 д д
в 43 = а 44 a 2 , в 44 = 2 2 .
, ω 22 a 22
органом - в 24 = ю 2 Z 2 + fl 2 a 2 , в 42 = в 24 .
Численное моделирование представлено на рис. 1 (движение апериодического звена), рис. 1, 2 (выход источника питания на автоколебательный режим). В случае если амплитуда автоколебательного процесса источника питания не выходит на величину, равную полуоси эллипса, исполнительное звено начинает вибрировать (рис. 3, 4).
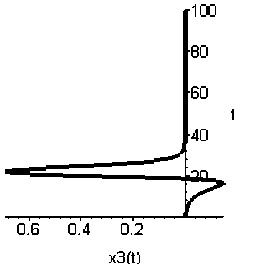
Рис. 1
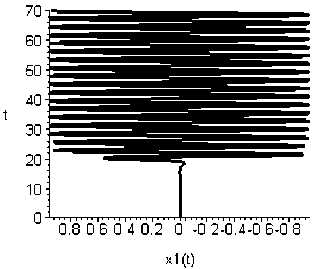
Рис. 2
62 А.С. Горобцов, Е.Н. Рыжов. О математических принципах построения областей виброизоляции
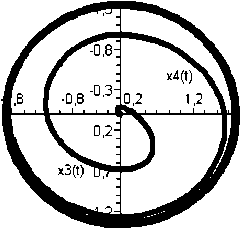
Рис. 3
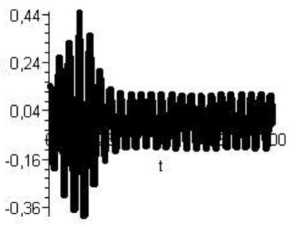
Рис. 4
Список литературы О математических принципах построения областей виброизоляции
- Горобцов, А. С. Задачи нелинейной стабилизации и аналитический синтез режимов движения многомерных динамических систем/А. С. Горобцов, Е. Н. Рыжов. -Волгоград, ВолгГТУ, 2008. -176 с.
- Гудвин, Г. К. Проектирование систем управления/Г. К. Гудвин, С. Ф. Гребе, М. А. Сальгадо. -М.: Бином. Лаборатория знаний, 2004. -911 с., ил.
- Зубов, В. И. Устойчивость движения/В. И. Зубов. -М.: Высш. шк., 1973. -272 с.
