О минимальной индуктивности сглаживающего дросселя тиристорного электропривода в граничном режиме работы преобразователя

Автор: Карнаухов Николай Фдорович, Мартынов Владимир Васильевич, Статовой Дмитрий Александрович
Журнал: Advanced Engineering Research (Rostov-on-Don) @vestnik-donstu
Рубрика: Технические науки
Статья в выпуске: 7-8 (75) т.13, 2013 года.
Бесплатный доступ
Исследованы режимы работы сглаживающего дросселя в цепи двигателя постоянного тока (ДПТ) тиристорного электропривода. Приведены основные математические и графические зависимости изменения индуктивности L с сглаживающего дросселя от угла управления и числа фаз тиристорного преобразователя (ТП). Рассмотрена ситуация малой скорости перемещения исполнительного механизма (ИМ) технологической машины (ТМ) и уменьшения зоны прерывистого тока (ЗПТ) якоря. Показано, что в этом случае для увеличения жёсткости механической характеристики ДПТ минимальное значение индуктивности сглаживающего дросселя (L с) целесообразно определять при граничном угле управления α гр, равном 50-60 эл. град. В этом случае состояние магнитопровода дросселя определяется ветвями частного предельного несимметричного гистерезисного цикла, характеризующего электромагнитные процессы в магнитопроводе под воздействием однополярных импульсов тока. Эффективность использования сердечника дросселя при этом определяется приращением индукции, т. е. разностью уровней остаточной индукции В(0) и индукции насыщения материала магнитопровода. Введение воздушного зазора (δ) стабилизирует эквивалентную магнитную проницаемость сердечника. Её могут нарушить нагрев магнитопровода сглаживающего дросселя током якоря, температурные колебания окружающей среды и условия эксплуатации тиристорного электропривода. В случае минимальной индуктивности L с сглаживающего дросселя (для граничного угла α гр) снижается влияние факторов дестабилизации эквивалентной магнитной проницаемости сердечника (при наличии воздушного зазора δ), исключаются ЗПТ. Это позволяет уменьшить электрические потери в силовом контуре системы ТП - ДПТ, а также формировать необходимую жёсткость механических характеристик ДПТ и равномерность движения ИМ ТМ в зонах малой частоты вращения якоря.
Тиристорный электропривод, сглаживающий дроссель, угол управления, непрерывный ток, снижение потерь, коэффициент пульсаций
Короткий адрес: https://sciup.org/14250032
IDR: 14250032 | УДК: 62-83:621.313.2.045.001.5 | DOI: 10.12737/2024
On minimal induction of thyristor drive smoothing throttle under converter edge operating conditions
The smoothing throttle operations in the DC-motor circuit of a thyristor drive are studied. The main mathematical and graphic dependences of the smoothing throttle Lс inductance modification on the control angle, and on the number of the thyristor converter (TC) phases are given. The situation of the technological machine (TM) executing mechanism (EM) low conveying speed and of the armature pulsating current zone (PCZ) reduction is considered. In this case, it is reasonable to determine the minimal induction value of the smoothing throttle (Lс) at the boundary control angle αboun equal to 50-60 electric degrees for the increase in the mechanical characteristic rigidity of the DC motor. Then, the throttle magnetic conductor condition is defined by the branches of the specific limit asymmetric hysteresis cycle characterizing the electromagnetic processes in the magnetic conductor under the influence of the unipolar current pulses. Thus, the efficiency of the throttle core usage is defined through the incremental induction, i.e. through the difference in the residual induction B(0) levels, and the magnetic conductor material saturation induction. The airgap injection (δ) stabilizes the core equivalent magnetic capacity which can be broken by heating the throttle magnetic conductor with the armature current, by the environmental temperature fluctuations, and by the operation conditions of the thyristor drive. At the minimum inductance Lc of a smoothing throttle (for a boundary angle αboun), effects of the stabilizing factors of the core equivalent magnetic capacity (with airgap δ) decrease, PCZ is excluded. This permits to reduce electric losses in the power contour of the TC - DC-motor system, and also to form the required rigidity of the DC-motor mechanical characteristics, and the TM EM movement steadiness in the anchor low rotation frequency zones.
Текст научной статьи О минимальной индуктивности сглаживающего дросселя тиристорного электропривода в граничном режиме работы преобразователя
Введение. Различные принципы преобразования электрической энергии находят применение в электромеханических системах (ЭМС) широкого назначения, в частности в структурах автоматизированного электропривода (АЭП) технологических машин (ТМ): промышленных роботов (ПР), металлорежущих станков и обрабатывающих модулей [1]. Важнейшее отличие управляемого АЭП — обеспечение программируемых технологических режимов работы ТМ, выполнимость требований к позиционированию исполнительного механизма (ИМ), включая и малые скорости его перемещения [2]. Традиционно тиристорный АЭП постоянного тока применяют в ТМ, где предусмотрено регулирование частоты вращения (перемещения ИМ), рабочего органа (РО) в широком диапазоне и с высоким быстродействием (при повышенной точности и равномерности его перемещения).
Известно [3, 4, 5], что использование дополнительной индуктивности (сглаживающего дросселя L с ) в цепи двигателя постоянного тока (ДПТ) при питании от тиристорного (ТП) (или широтно-импульсного преобразователя (ШИП)) уменьшает зону прерывистых токов (ЗПТ) якоря, повышает линейность механических характеристик ДПТ, увеличивает диапазон регулирования скорости, способствует улучшению технических и энергетических показателей АЭП. Известно, что при малой индуктивности цепи якоря ДПТ и прерывистом токе создаётся неблагоприятный режим работы ДПТ, сопровождаемый дополнительными потерями электроэнергии, ухудшением коммутационных процессов в коллекторной цепи машины постоянного тока (МПТ) из-за превышения мак-
Работа выполнена в рамках инициативной НИР.
симального тока якоря в 1,2—2 раза [3, 4]. В процессе регулирования тока якоря в системе ТП — ДПТ (или ШИП — ДПТ) от минимального ( I я . min ) до номинального ( I ян ) суммарная катодная индуктивность ( L Σ ) контура якоря (с последовательно включённым сглаживающим дросселем L с ) изменяется (рис. 1) из-за нелинейности кривой намагничивания сердечника дросселя. Это следует рассматривать как внутреннее параметрическое возмущение в системе [5], влияющее на режимы работы и управление АЭП.
Рис. 1. Упрощённая схема замещения энергетического канала АЭП системы ТП — ДПТ
Обобщённую систему ТП — ДПТ можно представить схемой (см. рис. 1). Регулируемое выходное напряжение U тп поступает на ДПТ (Д) через обмотку сглаживающего дросселя ( L с ) и эквивалентное (суммарное) активное сопротивление ( R э ) контура энергетического канала ТП. Введём обозначения: L s — суммарная индуктивность, определяемая как L ^ = Lя + Lc . Здесь Lя — индуктивность обмотки якоря двигателя; L с — индуктивность сглаживающего дросселя.
Представим напряжение U L на дросселе через известные физические переменные
U = Wd^ 0 = W . S — или dB = 1- U - dt , (1)
L dt dt W • S где W — число витков дросселя, Ф0 — магнитный поток и S — поперечное сечение сердечника дросселя.
В этом случае после интегрирования последнего соотношения из (1) воздействие очередного импульса напряжения Umr(t) длительностью t = tu повысит значение индукции B(t) в сердечнике до уровня tи
В ( t ) = rs | U - d + B ( 0 ) - (2)
где B (0) — остаточное значение индукции. Оно обусловлено результирующим эффектом влияния предыдущего импульса тока в формировании гистерезисного цикла кривой намагничивания сердечника, зависит от амплитуды и длительности однополярного импульса тока ( t и ), а также от величины установленного воздушного зазора δ в сердечнике [6, 7].
Изменением параметров напряжения U тп ( t ) в процессе регулирования угла управления (α) тиристорами ТП обусловлена неоднозначность величины индукции B ( t ). Она влияет на эффективность работы АЭП в зоне малых скоростей вращения якоря, на равномерность перемещения ИМ, которая также зависит от линейности механических характеристик ДПТ. В общем случае напряжение равновесия для контура управления (при постоянном магнитном потоке (Ф я ) двигателя Д) можно представить следующим уравнением:
и тп = 1 я 0 . R э + С е • ^ . Ф я + L . . dd 0- , (3)
где U тп — управляемое напряжение на якоре ДПТ, формируемое ТП; С Е — коэффициент пропорциональности двигателя по ЭДС; Q — угловая частота вращения ДПТ; 1я0 — постоянная составляющая тока якоря ДПТ.
В приведённой схеме (см. рис. 1) Ω регулируется в соответствии с зависимостью Q = f ( Um n при изменении тока якоря и индуктивного сопротивления контура тока, определяемого степенью насыщения сердечника дросселя ( L с ). Расчётные режимы работы АЭП в этом случае смещаются и изменяются электромагнитные процессы в силовом контуре ТП. В совокупности указанные факторы ухудшают качество управления системой ТП — ДПТ и снижают эффективность использования электроэнергии. Это обусловлено возникновением ЗПТ и увеличением коэффициента пульсаций тока ( k i ) [3, 6, 8].
Постановка задачи исследования. Если принять значение L я ДПТ как const, то значение L с обусловливает допустимые изменения коэффициента k i пульсаций тока якоря ДПТ (при выделении постоянной составляющей 1я 0 ) в широком диапазоне изменения Q. Зона же регулирования индуктивности L с (за счёт изменения δ сглаживающего дросселя) [9] обычно определяется при наладке силовой части АЭП. При этом исходят из данных измерений уровней коэффициента пульсаций k i тока ТП, зависимых от величины L Σ контура тока и угла управления α.
Известно, что переход от режима непрерывного тока к режиму прерывистого тока в ТП определяется критическим углом управления α кр ≈ π/2 - π/ m в [3, 7, 10], зависящим от числа фаз m в . Поиск математических зависимостей k i = f (α, L с ) и предварительная оценка искомых параметров модуля ТП на стадии проектирования ТМ позволяют повысить эффективность преобразования электроэнергии в системе ТП — ДПТ, предопределить и обеспечить технические характеристики, конструктивные особенности сглаживающего дросселя и оценить массогабаритные показатели модуля ТП АЭП.
Основные положения для решения задачи. Чтобы изложить подход к решению приведённой задачи [4, 6], представим напряжение Uтп на выходе ТП как сумму среднего значения выпрямленного напряжения Ud и некоторой переменной составляющей Ud~ по выражению го итп = Ud + 2 Ud (к), (4)
к = 1
где 2 u d ( к ) — сумма высших гармонических составляющих напряжения ( U d~ ). В соответствии k = 1
с (4) среднее значение тока якоря (iяс) двигателя (Д) также можно представить выражением го
■'яс = 1 я 0 + 2 ' я ( к ) , (5)
k где 1я0 — постоянная составляющая тока якоря; "2 'я (к) — суммарная переменная составляющая k тока якоря.
С учётом гармонических составляющих по (4) и (5) выражение (3) можно представить в виде го го
U d + 2 U d ( к ) = Е я + R я ■ 1 я 0 + 2 ' я ( к ) к = 1 L к
+ L ■
d
го
1 я 0 + 2 ' я ( к ) k
dt
где Eя = СЕ·Ω·Фя — среднее значение противо-ЭДС двигателя; Rя — омическое сопротивление об- мотки якоря.
Для установившегося режима работы ТП напряжение U d = Е я + к я ■ 1 я 0 , а значение
R я '2 ' я ( к ) в (6) мало в сравнении с остальными величинами и L c » 1я . Поэтому соотношение k
-
(4) можно представить как
го
d 2 'я (к)
U тп - U d = L ■ k df . (7)
Уравнение (7) соответствует уравновешиванию гармонических составляющих выпрямленного напряжения гармоническими составляющими ЭДС самоиндукции контура цепи тока ДПТ. Следовательно, уровень пульсаций тока якоря можно определить как разность между максимальным i яс max и минимальным i яс min значениями колебаний тока для конкретного периода времени фазного напряжения. Причём значение тока i яс min определяется в момент отпирания тиристора (например, для угла α 1 , (рис. 2) во временном интервале 0—π/2 оси ω t ) при периодическом синусоидальном напряжении, а максимальное значение i яс max — в момент равенства мгновенного и среднего значений выпрямленного напряжения, т. е. при угле α 2 .
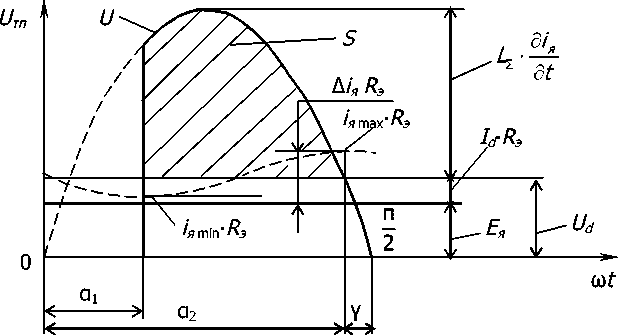
Рис. 2. Временные диаграммы фазного напряжения и тока управляемого выпрямителя
В результате интегрирования выражения (7) в пределах изменений угла управления ТП (от α 1 до α 2 ) можно получить
Здесь выражение
1 ω
α2
j U mn d ^ - U d • ( a2 - ai )
α1
J U rnn d 9" U d ' ( a2 " ai ) α1
Σ яс max
.
яс min .
определяет площадь S (см. рис. 2) при 9 = to • t , огра-
ниченную зависимостями: кривой мгновенного значения выпрямленного напряжения U , уровнем среднего значения напряжения U d и вертикальной линией, положение которой определяется углом управления α 1 . Примем, что коэффициент пульсаций тока k i определяется из соотношения
/ - i.
-
k. = —. При этом коэффициент загрузки ДПТ [8] — к
iз я 0
Iя 0 , другие параметры из I я 0 ном
соотношений R
ном
Ud 0
I я 0 ном
и r
R ; I ; 0 ном • R
R ном
Ud 0
я » 0,1 . Мгновенное U = Um и среднее U d значе-
ния выпрямленного напряжения составят и*тп
= Umm и U Ud 0
U
* d , соответственно отнесённые к d ,
U d .0
среднему значению напряжения U d 0 ТП при α 1 = 0. Таким образом, путём преобразования выражения (8) можно получить зависимость для определения k i тока якоря в виде [8]
α2
j UTnd 9 " Ud • ( a2 " ai )
-
k,. « ^1----------------------------------
,
0,1 • tgф • k3
где tg ф =
to • L ^
R я
— коэффициент учёта параметров элементов энергетического канала, k З —
коэффициент загрузки ТП.
Для номинальной нагрузки ТП при расчёте k i значение k З принимают соответственно k З = 1. Соотношение (9) позволяет определить минимальное значение индуктивности L с сглаживающего дросселя при допустимом уровне k i для конкретного значения L я в виде
R
L = tg ф ■ -я — L . c ω я
Экспериментальные исследования управляемых ТП проводились на собранных по схеме ТП —ДПТ лабораторных стендах. Число фаз силовых трансформаторов: m в = 2, m в = 3. Частота сети питания ω = 2π f = 314 с -1 .
В качестве силовых элементов использовались:
— сглаживающий дроссель (регулируемый за счёт воздушного зазора δ) [6, 9] типа Д255Т (ШЛМ 16×25, соединение обмоток последовательное), L нд = 0,02 Гн; I нд = 3,2 А; U ~ = 1,3 В; R д = 0,436 Ом;
-
— ДПТ типа СЛ661 [10]: P = 0,23 кВт, U н = 110 В, I ян = 2,9 А; n = 2400 об/мин, R я = 3,68 Ом; М н = 0,916 Н·м; L я = 0,0014 Гн; J = 0,91·10 -3 кг·м 2 .
Для выполнения расчётов и уточнения полученных соотношений были определены следующие величины: выпрямленное напряжение U d , интегральная площадь S для углов управления α, коэффициент пульсаций k i .
Выпрямленное напряжение:
m П
U d = Тв ■ J U m ■ sin M 9 2 ■ П
π
—
α
2-n nan mB
J U m ■ sin 9d 9 ,
где α 0 — угол управления тиристора, отсчитанный от точки пересечения синусоиды с линией U d .
П I
2 mв
Площадь S для углов a k < a < — ■ 1 1
S = U ■ — + J U ■ sin9d9 — YU ■ sin9d9 — U ■(П — a — Y) = U ■(e + Y) + VU. — U2 — U ■ cos9, (12) mв 00
4. UdQ ■ Ud D n L 2
где a. = arctg —d0-; у = arcsin -d-; 9 = a---1 k U U2 m mmV
Коэффициент пульсаций k i :
k i = 10 ■
( 9 + у ) ■ cos a +
π
π m ■ Sin-- B
V в /
2 n ■ cos 9
— cos2 a
π m ■ sin — в mв
tgφ
Выражение (13) после преобразований [4, 8] для случая, когда mв = 2 и mв = 3, можно записать в уточнённом виде:
I a + Y — k im B = 2 = 10 ■ R „ ■V--------
П I _ - ■ cos a +
2 J
n Y
— cos 2 a
to ■ L z
,
k mB = 3 = 10 ■ Rfl ■
п I I 2п I a + y — ■ cos a + . —
2 J <3У3 J
— cos 2 a
—
π sinα
>
to ■ L z
,
„ „ „ n 2 ■ cos a _ „ „ э. 343 ■ cos a где при mB = 2 y = arcsin-------, а при mB = 3, соответственно, y = arcsin---2----
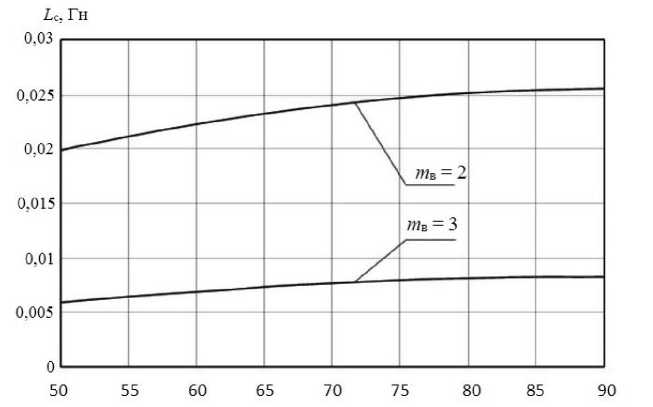
На рис. 3 представлены зависимости индуктивности L с от угла управления α при m в = 2, m в = 3 и условно принятом значении коэффициента пульсаций k i = 1 тока якоря. Это типично для работы АЭП в зоне изменения угла управления α (в диапазоне от 50 до 90 эл. град.), характеризуемой прерывистостью тока якоря как в начальной стадии «пуска» ДПТ, так и в конечной — «при торможении» [1, 6, 11].
а, зп. град
Рис. 3. Зависимость индуктивности сглаживающего дросселя от угла управления при единичном значении коэффициента пульсаций
По зависимости L c = f (a) можно определить ожидаемый диапазон изменения регулируемой индуктивности L c (с воздушным зазором δ). Это необходимо для сохранения режима работы ДПТ по допустимой пульсирующей составляющей однополярного тока якоря [10] — например, при движении ИМ в зоне малой скорости, реверсировании ДПТ и изменении тока.
Для улучшения характеристик дросселя из ферромагнитных материалов (за счёт введения воздушного зазора δ в пределах 0,01—1,5 мм в процессе наладки АЭП) эквивалентную магнитную проницаемость сердечника уменьшают. Это обусловливает снижение уровня остаточной индукции B (0) при перемагничивании сердечника по частному циклу в соответствии с выражением (2). Такое решение положительно изменяет характеристики сглаживающего дросселя [9, 11], работающего с изменяющимися амплитудой и длительностью однонаправленных импульсов тока якоря в схеме ТП — ДПТ при регулировании угла α. В рассматриваемом случае (при заданных параметрах: m в , ω, R я , L я и k i ) значение индуктивности L c (в зоне регулирования угла α управления ТЭП для m в = 2) изменяется в пределах 0,02—0,0255 Гн, что для схемы m в = 3, соответственно, составляет 0,0065—0,008 Гн.
Аналитические выражения (14) позволяют определить значения минимальной индуктивности L c (при стабилизации воздушного зазора сердечника дросселя в процессе выполнения наладочных работ) в зависимости от числа фаз и режима работы ТП АЭП по углу управления α. Сердечник сглаживающего дросселя работает в режиме подмагничивания [1, 3, 11], т. е. по частному гистерезисному циклу кривой намагничивания. Поэтому для сохранения k i изменение индуктивности составляет 27,5 % (при приращении Δα на 40 эл. град. для схемы m в = 2) и соответственно 23,2 % (для схемы m в = 3).
Предполагаемое равенство коэффициентов k i соблюдается, если значение L с для α кр в схеме m в = 2 превышает в 3,3 раза значение L с для случая, когда m в = 3.
Известно [11], что в процессе эксплуатации АЭП возможны изменения параметра L с из-за нарушения установленного зазора δ. Причины — нагревание сердечника сглаживающего дросселя, колебания значений dB , В (0) и ширины tu импульса тока якоря при работе ТП в ЗПТ. Указанные факторы в совокупности различно влияют на магнитное состояние сердечника. Это не позволяет по (1) и (2) дать однозначную оценку реальных изменений индуктивности L с в рассматриваемом диапазоне регулирования α кр согласно (14). Следовательно, при работе АЭП ТМ в повторнократковременном режиме для сохранения постоянства k i тока якоря, предсказуемости механических характеристик ДПТ в ЗПТ в процессе реализации минимальные расчётные значения индуктивности L c (при проектировании схемы ТП — ДПТ) целесообразно определять с учётом числа фаз ( m в ) и критического угла управления α кр = 50—60 эл. град. [2, 3, 10]. Это позволяет сохранить минимальный коэффициент k i при работе ДПТ в ЗПТ и расширенном диапазоне изменения статического момента на валу ДПТ, когда управление АЭП ТМ осуществляется в зоне малой скорости движения ИМ, а регулирование угла управления ТП находится в диапазоне от α = 50 до α ≈ 90 эл. град.
Таким образом, можно конкретизировать условия определения минимального значения L с и пульсаций магнитных составляющих электромагнитного поля B ( t ) сглаживающего дросселя. Это следует учитывать при выборе исходных данных для расчёта и оценки электромагнитной совместимости [12] проектируемой системы ТП — ДПТ, включающей собственно силовой блок ТП, сглаживающий дроссель и микропроцессорную систему управления (МСУ) при блочно-модульном исполнении АЭП ТМ.
Выводы. Выполненное исследование режимов работы сглаживающего дросселя тиристорного АЭП ТМ в системе ТП — ДПТ позволяет сделать следующие выводы.
-
1. При проектировании АЭП для уменьшения зоны прерывистых токов и снижения её влияния на линейность механических характеристик ДПТ минимальную индуктивность L c сглаживающего дросселя целесообразно рассчитывать для критического угла управления тиристорами ТП α кр = 50—60 эл. град. и с учётом числа фаз ( m в ) преобразователя.
-
2. Расчётная индуктивность L c сглаживающего дросселя сохраняет заданный коэффициент пульсаций тока в широком диапазоне изменения угла управления α (до 90 эл. град.) и позволяет обеспечить более равномерное движение ИМ в зонах малой скорости перемещения ИМ РО ТМ при сниженных потерях электрической энергии в ДПТ.
Список литературы О минимальной индуктивности сглаживающего дросселя тиристорного электропривода в граничном режиме работы преобразователя
- Лукинов, А. П. Проектирование мехатронных и робототехнических устройств: учеб. пособие/А. П. Лукинов. -Санкт-Петербург: Лань, 2012. -608 с.
- Карнаухов, Н. Ф. Электромеханические и мехатронные системы/Н. Ф. Карнаухов. -Ростов-на-Дону: Феникс, 2006. -320 с.
- Перельмутер, В. М. Системы управления тиристорными электроприводами постоянного тока/В. М. Перельмутер, В. А. Сидоренко. -Москва: Энергоатомиздат, 1988. -304 с.
- Булгаков, А. А. Новая теория управляемых выпрямителей/А. А. Булгаков. -Москва: Наука, 1970. -320 с.
- Карнаухов, Н. Ф. О возможностях программного управления режимом динамического торможения двигателя постоянного тока при позиционировании промышленного робота/Н. Ф. Карнаухов, М. Н. Филимонов, А. В. Бондаренко//Информационное обеспечение и управление в мехатронных производственных системах: межвуз. cб. науч. ст. -Ростов-на-Дону, 1998. -С. 74-82.
- Вдовин, С. С. Проектирование импульсных трансформаторов/С. С. Вдовин. -Ленинград: Энергоатомиздат, 1991. -148 с.
- Схема питания электропривода со сглаживающим дросселем в цепи постоянного тока: патент 2224350 Рос. Федерация: H02M1/14, H02P5/16, H02P7/29, B60L15/08/Н. Ф. Карнаухов, Р. С. Мироненко, М. Н. Филимонов. -Заявл. 10.09.2003; опубл. 20.02.2004.
- Тиристорные регулируемые электроприводы постоянного тока/Н. Н. Алексеева [и др.]. -Москва: Энергия, 1970. -134 c.
- Сидоров, И. Н. Индуктивные элементы радиоэлектронной аппаратуры: справочник/И. Н. Сидоров, М. Ф. Биннатов, Л. Г. Шведова. -Москва: Радио и связь, 1992. -228 с.
- Поздняков, О. И. Электропривод промышленных роботов: учеб. пособие/О. И. Поздняков. -Москва: Изд-во МПИ, 1990. -116 с.
- Ерофеев, А. А. Теория автоматического управления: учебник для вузов/А. А. Ерофеев. -2-е изд., перераб. и доп. -Санкт-Петербург: Политехника, 2001. -302 с.
- Карнаухов, Н. Ф. Проблемы электромагнитной совместимости применения преобразовательных устройств/Н. Ф. Карнаухов, А. А. Линьков, А. Ю. Ястребов//Управление. Конкурентоспособность. Автоматизация: сб. науч. тр. -Ростов-на-Дону: Изд-во ИУИ АП, 2004. -Вып. 3. -С. 8-12.
