О непараметрических алгоритмах идентификации нелинейных динамических систем

Автор: Коплярова Надежда Владимировна, Сергеева Наталья Александровна
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Математика, механика, информатика
Статья в выпуске: 5 (45), 2012 года.
Бесплатный доступ
Рассматривается задача идентификации нелинейных динамических процессов с использованием моделей Винера и Гаммерштейна, в которой линейная динамическая часть объекта находится в условиях непараметрической неопределенности. Вид нелинейности предполагается неизвестным или известным с точностью до параметров. Приводится алгоритм для создания адекватных в смысле среднеквадратичного критерия моделей систем. Предложенный способ моделирования динамических объектов основан на непараметрическом оценивании линейной и нелинейной частей системы.
Нелинейность, непараметрика, модели винера и гаммерштейна
Короткий адрес: https://sciup.org/148176967
IDR: 148176967 | УДК: 62-506.1
About nonparametric algorithms of nonlinear dynamical processes identification
The authors consider a problem of nonlinear dynamical systems of Wiener-Hammerstein type identification, when linear dynamical part of the system is in conditions of nonparametric uncertainty. The type of nonlinearity is assumed to be unknown or known completing the parameters. The algorithm for creation of adequate, as root mean square criterion, for models of systems. The proposed method of dynamic objects modeling is on nonparametric estimation of linear and nonlinear sub-systems.
Текст научной статьи О непараметрических алгоритмах идентификации нелинейных динамических систем
Развитие теории и методов математического моделирования нелинейных динамических систем является актуальной проблемой современной прикладной математики. Наиболее важным с практической точки зрения классом динамических процессов являются системы, допускающие активный эксперимент при отсутствии полной априорной информации о структуре и параметрах моделируемого объекта.
Постановка задачи идентификации систем. В общем виде задача идентификации нелинейной динамической системы может быть представлена следующим образом (рис. 1).
Доступная априорная информация представляет собой неравномерную выборку {ut, xi, i = 1,5} измерений входных и выходных переменных объекта объемом 5. Данные о структуре объекта отсутствуют. Требуется по наблюдаемым входным-выходным переменным процесса построить математическую модель стохастического объекта, адекватно описывающую его поведение при произвольном входном воз- действии и наличии аддитивной помехи на выходные данные.
Непараметрические модели. Основная особенность нелинейных динамических систем заключается в том, что они обладают нелинейными и динамическими свойствами, которые невозможно четко разделить. Описание нелинейной динамической системы в форме линейного передаточного коэффициента (по аналогии с линейной системой) приводит к бесконечному многообразию передаточных функций Н(jw ), так как каждой реализации входного воздействия u ( t ) и отклика x ( t ) будет соответствовать своя функция Н(jw ) [1].
Для упрощения моделирования нелинейный объект может быть представлен в виде некоторой комбинации линейных динамических и безынерционных нелинейных блоков. В таком случае модель, которая описывает исследуемый объект с требуемой точностью, представляет собой наилучшую комбинацию линейных (ЛЭ) и нелинейных элементов (НЭ) и их параметров.
Рис. 1. Общая схема идентификации:
Объект - нелинейный динамический объект; £( t ) - ненаблюдаемое случайное воздействие;
u ( t ) - входные переменные объекта; х ( t ) - выходные переменные объекта, u j , х ^ - соответствующие наблюдения переменных процесса, далее обозначаемые { u , , х , , t = 1, 5 }; s u ( t ), s х ( t ) - случайные факторы, действующие в каналах измерения переменных в дискретные моменты времени t , такие что M { s } = 0, O ' s } < да ; х ( t ) - выход модели объекта
Модель Гаммерштейна
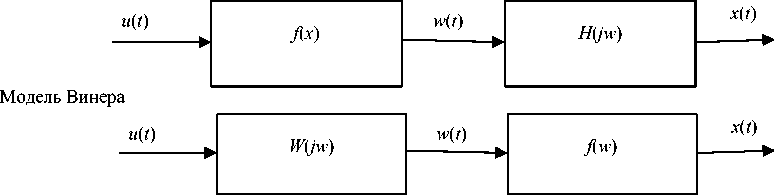
Рис. 2. Модели Винера и Гаммерштейна (обозначения см. в тексте)
Простейшие модели нелинейного динамического объекта - модели Винера и Гаммерштейна - представляют собой последовательное соединение двух блоков (рис. 2).
Преимуществом использования таких моделей является их относительная простота, выражающаяся в том, что нелинейные и динамические свойства исследуемого объекта в них искусственно разделены и сосредоточены во входном и выходном блоках. Линейный динамический блок простейшей модели должен в какой-то мере воспроизводить динамические свойства исследуемого объекта, а нелинейный блок - имитировать нелинейные свойства исследуемого объекта [1]. Однако простейшие модели описывают реальный объект лишь приближенно. Основная сложность в построении моделей таких объектов заключается в том, что внутренние сигналы w ( t ) являются недоступными для измерения.
Пусть исследуемая нелинейная динамическая система представлена в виде двух последовательно включенных звеньев - линейного динамического и нелинейного статического (модель Винера или Гаммерштейна) - и имеется выборка измерений реакции объекта на тестовое входное воздействие u ( t ): { u ( t, ) , x i } , i = 1, 5 . Данные о структуре объекта отсутствуют. Существует возможность проведения экспериментов.
Здесь возможны два случая:
-
1) структура и параметры линейной динамической части системы неизвестны. Предположим некоторый вид нелинейности в объекте - известный с точностью до набора параметров. Тогда нелинейный элемент может представлять собой одно из следующих звеньев:
-
- квадратор, который задан соотношением
x ( t ) = a ( w ( t ) ) 2; (1)
-
- звено насыщения с порогом насыщения b 1 :
w ( t ) , x 1 ( t ) ^ b 1 ,
x (t ) = < b, w (t )> b, (2)
E b, w (t) < - b;
-
2) тип нелинейного элемента неизвестен.
На основании имеющейся информации необходимо построить модель данной системы, адекватно описывающую ее поведение.
Задача идентификации нелинейной системы может быть разделена на две части: идентификацию линейного элемента и идентификацию нелинейной системы.
Рассмотрим задачу идентификации линейного элемента.
Метод построения непараметрической модели линейной динамической системы (ЛДС) основан на том, что реакция такой системы w ( t ) на входное воздействие u ( t ) описывается интегралом Дюамеля (сверткой) [2]:
t x (t) = k (0) u (t) + J k'(t - t) u (t) d т =
t
-
= k (0) u ( t ) + J h ( t — t ) u ( t ) d t , (3)
где k ( t ) - переходная функция системы; т - переменная интегрирования; h ( t ) - весовая функция системы.
Для вычисления значения выхода объекта x ( t ) необходимо знать его весовую функцию h ( t ) . Однако на практике снятие весовой функции с объекта представляется невозможным. Поэтому основная идея идентификации ЛДС в условиях непараметрической неопределенности состоит в непараметрическом оценивании весовой функции.
Запишем оценку переходной функцию системы в виде стохастической аппроксимации регрессии непараметрического типа следующим образом:
5 (1
k = Ek ■ H t-i , si
-
5 ■ C i = 1 I C J
где ki - реально снятые значения переходной характеристики ЛДС, т. е. сигнал, получаемый на выходе системы при подаче на ее вход единичного ступенчатого воздействия 1(t); H(■) - колоколообразная функция; С5 - параметр размытости. На них накла- дываются условия сходимости, которым они должны удовлетворять [3]:
C s > 0, s = 1, 2, ...; lim C s = 0, lim sC s = да , s ^да s ^да
J H ' ( u ) du = 0, (5)
Q ( u )
C s J H ‘ ( u ) udu = - 1,
Q ( u )
lim s c —1 H I — | = 5 ( т — t ), u = —,
I Cs )
limssCs = да, Cs > 0, s = 1, 2,..., Cs ^ 0.(6)
Переходная функция h ( t ) связана с весовой функцией k ( t ) соотношением [3]:
h (t) = dk^,(7)
dt
Тогда непараметрическая оценка весовой функции примет следующий вид:
( ks = hs (t) =----E ki- H 'I—i- s ■ C ,= I c
.
Подставив оценку весовой функции в интеграл Дюамеля, получим непараметрическую модель ЛДС, после чего, заменив интеграл его дискретным аналогом (суммой), будем иметь непараметрическую расчетную модель линейного динамического элемента системы:
1 " t /” 1 1 — т j - t i 1
x s = k s (0) ■ u ( t ) +— EE H 1 —-— I u ( t j ) Ат , (9) s ■ Cs i = 1 j = 1 I Cs )
где т - переменная интегрирования, которая изменяется с дискретностью Ат .
А теперь рассмотрим задачу идентификации нелинейной системы для моделей Винера и Гаммерштей-на.
Модель Винера. Предположим, что структура нелинейного элемента в модели Винера (см. рис. 2) задана с точностью до набора параметров, т. е. выход исследуемого объекта вычисляется как некоторая функция от интеграла Дюамеля:
x ( t ) = f { w ( t ) , a } , (10) где x ( t ) - выходной сигнал системы; w ( t ) - выход линейной части системы (не измеряемый); u ( t ) - входной сигнал системы; f { } - нелинейный оператор.
Математическая модель нелинейного объекта может быть представлена в виде системы уравнений (9), (10), в которых вместо весовой функции h ( t ) и параметров a используются их статистические оценки. Эти оценки могут быть получены, если при тех же условиях эксперимента, в которых были получены реализации { u i , x i }, i = 1, s , сформировать выборку { u i ,®Д, i = 1, s .
Для некоторых классов нелинейных элементов выражение (10) может быть разрешено относительно ® ( t ) [4]:
Ю ( t ) = f - 1( x ( t ), a ). (11)
В этом случае непараметрическая модель нелинейного объекта примет вид
x( t ) = f ( w ( t ), a ), w ( t ) = J h ( t - т ) u ( т ) d т . (12)
Идентификация нелинейной системы с квадратором. Пусть имеется система, представленная в виде модели Винера, причем нелинейная часть этой системы представляет собой квадратор, описываемый функцией вида f ( p ) = cp 2, где c - константа, а выход объекта вычисляется следующим образом: x ( t ) = f ( w , a ) = cw 2.
При единичном входном воздействии u ( t ) = 1 выход нелинейной системы x ( t ) = cw ( t )2, т. е. переходную характеристику линейного элемента w ( t ) = k ( t ) можно выразить через выход исследуемого процесса:
k ( t ) = 7 x ( t )/ c . (13)
При произвольном входном воздействии и нулевых начальных условиях выход линейной части системы описывается выражением (9). С учетом рассчитанного значения переходной функции (4) выход линейного элемента будет следующим:
1 -s_, t /А t I x_ к t — т j — t i ^
w ( t ) = —EE J ~ H 1-------I u ( т j ) Ат . (14)
scs i = 1 j = 1 V c ( cs )
Тогда модель нелинейного объекта x ( t ) имеет вид
-т j - c
i st / А t ( t xt ) = - EE V x i ; H j- sc i = 1 i = 1
t ) I 2
- I u (Ъ) Ат , (15)
где x 1 i - реакция нелинейной системы на единичное входное воздействие; u ( t ) - тестовое входное воздействие.
В качестве примера рассмотрим нелинейную динамическую систему, поведение которой имитируется следующим образом: линейная часть объекта описывается дифференциальным соотношением
2 ■ y "( t ) + 0,3 ■ у ‘ + 1,5 ■ y ( t ) = u ( t ), (16) а нелинейный элемент представляет собой квадратор вида (1) с параметром а = 4,37 (рис. 3).
Идентификация нелинейной системы с насыщением. Пусть нелинейное звено системы описывается функцией вида (2). В данном случае при w ( t ) < а выход объекта совпадает с выходом его линейной динамической части. В остальных случаях выход объекта представляет собой константу, которую можно определить опытным путем в результате нескольких статических экспериментов [1].
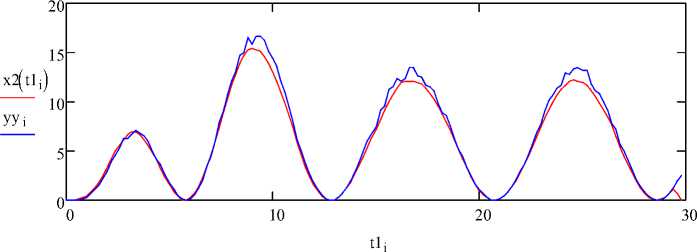
Рис. 3. Модель нелинейной системы x 2( t ) с выходом yyi , объемом выборки s = 150, шагом дискретизации h = 0,2, помехой 5 %, входным воздействием u ( t ) = 2cos(0,4 t ) и относительной средней ошибкой моделирования 2,5 %
x2( tli)
yyi
t1 i
Рис. 4. Модель нелинейной системы x 2( t ) с выходом yyi , объемом выборки s = 250, шагом дискретизации h = 0,12, помехой 5 % и относительной средней ошибкой моделирования 5,8 %
Для построения модели выполним следующие действия:
-
1) проведем ряд статических экспериментов, т. е. последовательно подаем на вход системы некоторые константы, в результате чего можно сделать вывод о значениях параметров функции, описывающей нелинейную часть системы;
-
2) получаем оценку нелинейного элемента системы, параметры которого определяются согласно следующему алгоритму:
-
– проведем серию экспериментов, в ходе которых будем подавать на вход системы воздействия u i j = C j , C j = const, в результате получим выборку { u , j , x , j }, i = 1, 5 , j = 1, m ;
-
– находим расстояние между двумя соседними измерениями: hh j = | x i j - x i - 1 j ^h ;
-
- если hh j < e , e > 0, b = x i j ;
-
- если x i j = b , то X j = y, - 1 j a = M { a j };
-
3) подаем на вход объекта ступенчатую функцию, амплитуда которой не превышает значения порога b , получаем переходную характеристику и строим модель линейной части объекта в виде интеграла Дюамеля;
-
4) строим модель объекта, выход которой вычисляется как значение функции, описывающей нелинейное звено с аргументом – выходом модели линейной части объекта.
Рассмотрим нелинейный динамический объект, линейная часть которого описывается дифференциальным соотношением
-
2,9 ■ y "( t ) + 1,27 ■ y ‘ ( t ) + 1 - y ( t ) = u ( t ) , (17) а нелинейный элемент представляет собой звено насыщения с параметрами b = 5, b 1 = 2, u ( t ) = 5sin( t ) (рис. 4).
Анализ работы модели нелинейного динамического объекта с видами нелинейности «звено насыщения» и «квадратор» позволяет сделать следующие выводы: полученная непараметрическая модель адекватно описывает систему при различных значениях параметров нелинейной части объекта, в условиях зашумленности каналов связи, при различном объеме выборки и различных входных воздействиях.
Модель Гаммерштейна. Рассмотрим систему, поведение которой может быть описано с помощью модели Гаммерштейна (см. рис. 2). Выход нелинейного элемента ro ( t ) в данном случае измерению недоступен. Предполагается, что параметризованная структура ЛЭ не известна, а нелинейная характеристика НЭ известна с точностью до набора параметров.
В модели Гаммерштейна связь между входом u ( t ) и выходом x ( t ) объекта при нулевых начальных условиях может быть описана уравнениями вида [4]:
t
w ( t ) = f ( u ( t )), x ( t ) = J h ( t -т ) ю ( т ) d t , (18)
или, исключая переменную ю ( t ),
t x (t) = J h (t-t) f (a, u (t)) d t, (19)
где h ( t ) - весовая функция динамического элемента; f ( a , u ) - нелинейная функция, заданная с точностью до вектора неизвестных параметров a .
Пусть x 1( t ) - реакция нелинейного объекта на входной сигнал в виде функции Хевисайда u ( t ) = 1( t ), x ( t ) - реакция объекта на тестовый сигнал, форма которого отличается от ступенчатого. Измерения сигналов x 1( t ) и x ( t ) в дискретные моменты времени образуют выборки наблюдений {1, x 1 i } и { u i , x i } i , i = (1, s ), соответственно.
Ступенчатый сигнал u(t) = 1 после прохождения нелинейного элемента сохраняет ступенчатую форму, но меняет амплитуду, т. е. ю1(t) = f (a, 1(t)) = c1, где c 1 - константа. Тогда выход нелинейной системы t x1( t) = J h1( t - t)1(t) d t можно рассматривать как пе-0
реходную функцию линейной системы с весовой функцией h 1( t ). Оценка этой функции М( t ) может быть получена на основе выборки ( x 1 i , t i , i = 1, s ).
С учетом оценки h1(t ) модель нелинейной системы (19) можно записать в виде tt
x ( t ) = J h 1 ( t - t ) w ( t ) d t = J h 1 ( t - t ) f ( u ( t ), a ) d t . (20) 0 0
Оценки параметров a находятся на основе выборки измерений { u i , x i }, i = 1, s ), реакции объекта x ( t ) на входной сигнал u ( t ) произвольной формы как решения экстремальной задачи.
Таким образом, нами в общем виде получены алгоритмы, позволяющие строить непараметрические модели нелинейных динамических систем, представленных в виде последовательного соединения линейного и нелинейного звеньев. Эти алгоритмы не предусматривают наличия полной априорной информации о структуре объекта.
Определение типа нелинейности моделей Винера и Гаммерштейна. Пусть исследуемая система может быть описана в виде модели Винера, вид нелинейности которой неизвестен.
Если подать на вход системы единичное воздействие, то выход ее линейной части w ( t ) = k ( t ) будет стремиться к неизвестной константе С 1, а выход нелинейного объекта - к величине, равной fC 1) . При некотором произвольном постоянном входном воздействии u ( t ) = C w ( t ) = Ck ( t ), q ( t ) = f ( Ck ( t )). Проведя серию экспериментов над данной системой, в ходе которых будем подавать на ее вход различные константы, получим выборку
{U , Q }: U = { u„u 2 ,..., uc }, Q = { q„q 2 ,..., qc }, (21)
где qi - установившееся значение выхода системы при входном воздействии u i , причем значения q i будут пропорциональны fu i ), т. е. q i = C 2 f ( u i ), С2 = const.
На основании полученной выборки можно построить непараметрическую оценку функции нелинейного звена объекта q = f 1 ( u ) = f ( u ):
ss f 1(u)=Zq1HI u^ I/ZHI u^ I (22) i =1 V C J/ i =1 k CS J где q1i - установившееся значение выхода системы при входном воздействии u 1 i; H(•) - колоколообразная функция; С5 - параметр размытости.
Далее получим оценку функции u = f 2( q ) = f 1 ( q ):
ss f 2( u) = Z u1iH Iq 1/Z н I / I (23) i =1 V C5 J/ i =1 V C5 J
При этом в общем случае восстанавливается лишь часть нелинейного звена fp ) при t > 0, однако нам необходимо восстановить вид функции при любом аргументе. Для этого предположим, что функция нелинейного звена симметрична относительно оси ординат f (- p ) = f ( p ) или f (- p ) = - f ( p ).
Таким образом, будем считать, что вид нелинейности системы известен. При этом значения переходной функции линейного звена объекта k ( t ) могут быть рассчитаны следующим образом:
k ( t ) = f - 1( q ( t )) = f 2( q ( t )) .
При произвольном входном воздействии модель линейного элемента следующая:
1 st IA t t-т \ t * t w (t) = — ZZ f 2(q1i) ■ HI---— I u (t^^t, (24) scs , =1 j=1 V cs J а выход нелинейного объекта - x(t) = f 1( w(t)).
Тогда непараметрическая модель примет вид
x ( t ) = f 1
1 5 11 A t
—ZZ f 2( x . ) ■ H'
sc. i =1 j =1

- t i
u ( t j ) At
где x i - реакция нелинейной системы на единичное входное воздействие; u - тестовое входное воздействие.
Рассмотрим систему, в которой линейная часть объекта описывается дифференциальным соотношением
2 ■ У"(t) + 0,3 ■ у ‘(t) + y (t ) = u (t), а нелинейный элемент представляет собой звено насыщения с параметрами b 1 = 2, v0 = 0,4 (рис. 5).
Полученная непараметрическая модель адекватно описывает данную систему при различных видах нелинейной части объекта, в условиях зашумленности каналов связи, при различном объеме выборки и входных воздействиях.
