О построении модели бесплатформенной инерциальной навигационной системы авиабомбы с неинвариантными алгоритмами обработки информации

Автор: Кондратов Андрей Александрович, Кривоноженков Валерий Александрович, Щипицын Анатолий Георгиевич
Статья в выпуске: 3 (103), 2008 года.
Бесплатный доступ
Короткий адрес: https://sciup.org/147154639
IDR: 147154639 | УДК: 621.396.988.6
Текст статьи О построении модели бесплатформенной инерциальной навигационной системы авиабомбы с неинвариантными алгоритмами обработки информации
Анализ существующих тенденций развития авиационного вооружения убедительно показывает, что в настоящее время и в ближайшем будущем основное внимание специалистов должно уделяться созданию и совершенствованию высокоточного «интеллектуального» оружия, обеспечивающего эффективное «точечное» поражение целей в любых условиях, независимо от противодействия противника, в том числе с помощью активных или пассивных помех [1].
Таким образом, весь арсенал последних достижений в области решения навигационных задач, таких как GPS/ГЛОНАСС технологии, бесплат-форменные инерциальные системы, микромеханика и другие могут и должны быть использованы для создания управляемых и корректируемых авиационных бомб.
В работах [1,2] приводятся различные схемы комплексирования БИНС со спутниковыми навигационными системами (СНС): раздельная, слабосвязанная, жестко связанная, глубоко интегрированная схемы. Все они имеют свои преимущества и недостатки, но потенциальная точность выходной навигационной информации в них повышается за счет применения специальных схем комплексирования и алгоритмического обеспечения.
В данной работе ставится задача на исследование метода повышения точности выходных навигационных параметров БИНС за счет использования информации о динамических свойствах объекта.
Идея оптимизации алгоритмов ИНС на основе учета динамических свойств объекта не нова. В работах [3,4] затронуты вопросы повышения эффективности навигационных алгоритмов для объектов с известной динамикой.
В настоящей работе предлагается методика построения алгоритмов для БИНС с учетом линеаризованных уравнений движения У АБ на основе расширенного фильтра Калмана. Предлагается непосредственное включение оцениваемых навигационных параметров в вектор состояния.
1. Постановка задачи неинвариантной обработки информации в БИНС
В настоящей работе используются следующие правые прямоугольные системы координат (СК) [5]:
-
• инерциальная ОоХИ¥И7И с началом в центре Земли, оси ХИ и ZH которой направлены в точку весеннего равноденствия и по оси мира
(вращения Земли) соответственно, ось Уи образует правую ортогональную тройку (рис. 1);
• гринвичская ОИХ¥Х, связанная с Землей, ось X которой проходит через пересечение гринвичского меридиана с экватором, ось Z совпадает с ZH, а ось К также образует правую ортогональную тройку;
• сопровождающий навигационный трехгранник OENU с началом в центре масс обьекта-УАБ, оси Е, N и U которого направлены по географической параллели на восток, по меридиану на север и по местной вертикали вверх соответственно;
• связанная с объектом Oxyz, оси х, у и z которой совпадают с главными осями инерции УАБ и направлены (относительно конструкции) вперед, вверх, и вправо соответственно.
2. Модель движения У АБ
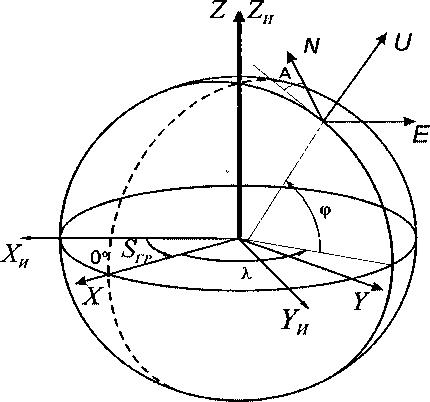
Рис. 1. Системы координат, используемые в БИНС
Задачу неинвариантной обработки информации в БИНС сформулируем следующим образом.
Будем считать, что гироскопы и акселерометры измеряют составляющие абсолютной угловой скорости УАБ и ее кажущиеся ускорения по связанным осям. Датчики положения аэродинамических рулей позволяют измерять управляющее воздействие на бомбу: отклонение руля высоты 8В, элеронов 8Э и руля направления 8Н. Стохастическая модель движения УАБ известна.
На основе измеряемых сигналов первичной инерциальной информации, а также сигналов управляющего воздействия на объект, используе- мых совместно с известной стохастической моделью его движения, требуется оценить параметры движения объекта.
Кинематические уравнения для поступательного и вращательного движения имеют вид [3, 5]:
Х = ^/((Д-ь/Осозф);
4> = WN/(R + hy, (1)
h = Wu;
С = С^ х]-[щ™и х] С. (2)
Здесь X, ф и h - географические координаты У АБ (долгота, широта и высота соответственно); WE,WN,WV - проекции на оси навигационного трехгранника ViENU - вектора скорости движения У АБ относительно Земли, которую в целях упрощения принимаем шаром радиуса R; ^ENU _р. QCOSф. ОзШф] _ угловая скорость вращения Земли в проекциях на оси навигационного трехгранника, ю™и =[-ф; Хсозф; Хзшф] - угловая скорость навигационного трехгранника относительно гринвичской системы координат; ®дм/и2и £1enu + ®™и - угловая скорость нави гационного трехгранника относительно инерциальной СК, определяемая вращением Земли и движением центра масс У АБ.
Поскольку из девяти элементов матрицы ориентации С независимыми являются только три, то при ее нахождении применяются различные варианты параметризации, например с помощью эйлеровых углов рыскания ф, тангажа и и крена у.
Матрица С с элементами су, i, j = 1,2,3 имеет сле дующий вид:
cn = -зшфсози;
С12 = 8Шф8ШиСО8у + СО8ф8Шу;
с13 = - sin ф sin и sin у + cos ф cos у;
^3x3 -
с21 = cos ф cos и;
с22 =-cos ф sin и cosy + sin ф sin у;
с23 = cos ф sin и sin у + sin ф cos у;
с31 =sinu;
с32 = cos и cos у;
с33 =-cos и sin у.
С учетом (3) уравнение (2) может быть записано в виде:
Ф = l/cosu^ cosy-o>z sin у);
■ и = ю^ siny+ у = <вх -tgu( Вектор относительной угловой скорости вычисляется по измерениям гироскопических датчи ков с учетом известной скорости вращения навигационного репера: ^ = й™ -С5™и = [о,; о,; х[8Шф8ши; - cos ф sin и; cosv] + +(cos ф sin у + sin ф cos у) [cos ф; зтф; 0]] . (5) Поступательное движение УАБ в инерциальной системе координат подчиняется основному закону динамики, который в проекциях векторов на оси навигационного трехгранника имеет вид: VNU = 1/М ■ CF^ + gENU - -(гСй^х]^®^])^, (6) где М - масса объекта, F^ - аэродинамическая сила, действующая на объект, в проекциях на оси связанной СК. Вращательное движение УАБ также описывается дифференциальным уравнением, вытекающим из основного закона динамики вращательного движения. Для УАБ, главные оси инерции которой совпадают с осями связанной СК, наиболее простой вид это уравнение имеет в проекциях на эти оси [3]: ^Tnu = (J^)"1(m^-[^x] J*^), (7) где J^=diag3x3(j„^,J:) (8) матрица моментов инерции, Jx,Jy,Jz - моменты инерции УАБ относительно осей связанной СК (главные моменты инерции УАБ). Аэродинамическая сила F^2, действующая на УАБ, определяется конфигурацией бомбы и характером обтекания ее воздушным потоком. В проекциях на оси связанной СК она может быть представлена в виде [3]: ^ =qSVcx; су, c^f. (9) Здесь ^ = рКВоЗД/2 - скоростной напор; р -плотность воздуха, зависящая от высоты полета; Квозд ~ величина воздушной скорости; S - характерная площадь УАБ; cx,cy,cz - безразмерные аэродинамические коэффициенты, получаемые в результате испытаний изделия в аэродинамической трубе и аппроксимируемые в соответствии с моделью: Сл=^(а) + с5в(а)8в; - 5 =су(а) + с®в (а)5в; (10) с, = с? (а) р + с?н (а)8н. где аир- углы атаки и скольжения УАБ, 8В,8Н — величины, характеризующие управляющее воздействие отклонения руля высоты и руля направления соответственно, wу - трехмерный вектор взаимно некоррелированных белых шумов, интенсивность которых определяется степенью неточности модели (10). Таким образом, Е£№/=СГПрЛ03д,а,Р,8в,8н^^^^ Аэродинамический момент сил, определяющий вращательное движение У АБ, в проекциях на оси связанной СК имеет представление, аналогичное (9): m™ = <7S/diag(l, 1,1)[тх; ту; m,] + wm, (12) где / - длина корпуса УАБ; тх, ту, mz - безразмерные коэффициенты аэродинамических моментов, аппроксимируемые в соответствии с моделью: тх=тх^а.,^*т^ (a)ox + +^ (a)^ + ™? (а)бэ + m®H ту = ту^а,^ + тух (а)а)х + CO (а)5н; +т^ (а)р + туэ (а)8э + т®н (а)8н; a = P = где mz = mz (a) + m<z‘ +m^ (a)5B. a + где 8Э - управляющее воздействие в виде отклонения элеронов; wm - трехмерный вектор взаимно некоррелированных белых шумов, интенсивность которых определяется степенью неточности (13); чертой обозначены безразмерные угловые скорости: co о,,, ®z =' = /о^/(2ЕВ0ЗД); = /гаг/(2КВ03Д); “ = /а/ЕВ03Д; .^ = ФКзд. Таким образом, m^ =m^'z(a,P,d,p,(ox,to^,a)z,83,8B, ^WmxlWmy,Wm2y (15) Параметры движения УАБ относительно воздушных масс - воздушная скорость Ивозд, а также углы атаки и скольжения аир- могут определяться по проекциям вектора воздушной скорости на оси связанной СК: V^ =c(w£OT/-U£W/); у2+ у2 + У2 • В03Дх г ВОЗД,, * В03Дг ’ a л2 + К2 ВОЗДХ Г ВОЗДу Скорость нарастания аэродинамических углов может быть определена дифференцированием выражений (16): _у у +у у ' воздх' ВОЗДу ' ' возд, ' воздх К2 + К2 ’ Т В03Дх’ ВОЗДу -V V V г воздхг воздхг воздг (у2 +у2 +у2 ) 1у2 Iг воздх1 г возд^, 1 г ВОЗДХ]МГ ВОЗД; У У У г ВОЗДу ’ ВОЗДу ’ воздг +и2 ' ' возд. воздх+ ^возд, +^возд2 )^^воздх+ ^возд, У (у2 +у2 ) г ВОЗД., I ВОЗДХ1 ' ВОЗДу I '2 + у2 +у2 ) 1у2 + у2 воздх 1 ' возд, 1 ' воздх 1 Ц ' воздх 1 ' возд. у г воздх Г ^^ = гВОЗДу возд /воздг _ х/^£№_и^ to^xjCx j^ENU _ у ENU ) Ветровое возмущение будем описывать как марковский процесс: 5£jvy=-T-1u№y + аиЕ ’ auN * аии ) V2/TUWU > где аи - среднеквадратическое значение составляющей скорости ветра в соответствующем направлении; Ту — период корреляции ветрового возмущения; Wy - трехмерный вектор взаимно некоррелированных белых шумов единичной интенсивности. Считаем, что измерение гироскопов и акселерометров искажено смещением нулей, ошибками масштабных коэффициентов и ориентации изме- ригельных осей, а также ставляюшую: имеет белошумную co- 1 + к, e e ^измер Ех E Здесь s и s 1 + K E s+As+ws. (20) S 1 + K гироскопов, a^z заменяют индексы ю^ и о для и а для акселерометров, w - трехмерные белые шумы. При этом все составляющие инструментальных погрешностей будем считать марковскими: X£rr - -TErrXErr + aErr 2/xErr wErr. Здесь Err заменяет необходимые индексы Аю^, Aa^, кю , ка (w - трехмерные векторы взаимно некоррелированных белых шумов единичной интенсивности), Ёт, Ёа (w - шестимерные векторы взаимно некоррелированных белых шумов единичной интенсивности). Особенность измерения ускорения состоит в том, что собственно ускорение в вектор состояния не входит. Однако, в соответствии с (9), (10) величина ускорения связана с параметрами движения УАБ относительно воздушных масс и с управлением. Поэтому для сигналов акселерометров в (20), с учетом (10), подставляем выражение: a^=l/M-qS^c/, су; с,]. (22)
3. Вектор состояния в задаче обработки информации Вектор состояния в задаче синтеза неинвариантного алгоритма для БИНС современной УАБ представим в виде набора векторных компонент, в числе которых: • вектор ХХфА = [X; ср; й], включающий географические координаты УАБ; • вектор Xw = [ср; и; у] параметров угловой ориентации УАБ; • вектор X^ENU = UVE’WN’Wul земной скорости УАБ; • вектор Х_^Уи2и = [шх ;юу; ®z] скорости углового движения УАБ относительно инерциальной системы координат; • вектор Xqenu = [UE-,UN',Uu} скорости ветра, характеризующий возмущающее воздействие на УАБ; • векторы, описывающие погрешности гироскопов и акселерометров: смещение сигнала Х№^ =[^;Л®^^] и Х^ =[Аах; Аа^; Aaz], ошибки масштабных коэффициентов ^Кщ “ [K ^ = k ’^xz’^yx"’ ^yz ’ E“>zr ’ Е®^ ] ’ Xea ~ [Eaw; Eaxz S Ea^ ’ Ea^ ’ Еаи > Ea^ ] • Таким образом, имеем 39-мерный вектор состояния: X = ^ХХфА; Хфиу; Х1 гои; Х^Уи2и ; х!ЛЖ; ). (23) Вектор состояния (23) определяет погрешности БИНС и не поддается непосредственному измерению. Однако имеется косвенная возможность его наблюдения при получении информации от спутникового приемника. Считая его измерения достаточно точными, предполагаем, что разница между параметрами, измеренными приемником и вычисленными БИНС определяет погрешности инерциальной системы. Далее синтезируем оптимальный дискретный фильтр Каймана, на выходе которого получаем оценку вектора состояния X [6]. На основании оценки вектора состояния X осуществляется коррекция выходных параметров БИНС. Следует подчеркнуть, что коррекции подвергаются только выходные параметры, поступающие потребителям. Заключение С переносом акцентов при построении БИНС в сторону более дешевых датчиков образуется ситуация, когда погрешности инерциального измерителя становятся сопоставимыми с достижимой точностью описания динамических свойств объекта навигации. Эффективным путем оптимизации алгоритмов инерциальной системы становится учет динамики объекта [3,4]. В ходе работы на основе калмановской фильтрации необходимо разработать алгоритм обработки сигналов акселерометров и гироскопов для оценки навигационных параметров УАБ. Для оценки возможностей по повышению точности выходных параметров БИНС необходимо провести численное исследование. В целях сопоставительной оценки точности алгоритмов, получаемых при инвариантном и неинвариантном подходах необходимо выполнить решение соответствующих уравнений для дисперсионных матриц вектора состояния.
Список литературы О построении модели бесплатформенной инерциальной навигационной системы авиабомбы с неинвариантными алгоритмами обработки информации
- Управление и наведение беспилотных маневренных летательных аппаратов на основе современных информационных технологий/под ред. М.Н. Красильщикова, Г.Г. Себрякова. М.: ФИЗМАТЛИТ, 2003. 279 с.
- Плаксин П.Л. Построение системы навигации авиационной бомбы с коррекцией ее движения от орбитальных спутников Земли/П.Л. Плаксин//Авиакосмическое приборостроение. 2006. № 9. С. 34-48.
- Федоскин О.И. Неинвариантные алгоритмы обработки информации для БИНС летательного аппарата/О.И. Федоскин//Гироскопия и навигация. 2003. № 4. С. 15-28.
- Дмитриев С.П. Неинвариантные алгоритмы обработки информации инерциальных навигационных систем/С.П. Дмитриев, О.А. Степанов//Гироскопия и навигация. 2000. № 1. С. 12-23.
- Бабич О.А. Обработка информации в навигационных комплексах/О.А. Бабич. М.: Машиностроение, 1991. 512 с.
- Ривкин С.С. Статическая оптимизация навигационных систем/С.С. Ривкин, Р.И. Ивановский, А.В. Костров. Л.: Судостроение, 1976. 280 с.
