О применении перспективного подхода к проектированию исполнительных двигателей антропоморфных роботов на силовых оболочках

Автор: Кабанен И.В.
Журнал: Международный журнал гуманитарных и естественных наук @intjournal
Рубрика: Социология
Статья в выпуске: 6-1 (21), 2018 года.
Бесплатный доступ
В работе описывается методика расчета передаточной функции исполнительного двигателя нижней конечности антропоморфного робота на основе силовых оболочковых элементов.
Силовой оболочковый элемент, пневматический привод, антропоморфный робот
Короткий адрес: https://sciup.org/170185279
IDR: 170185279
On the application of a perspective approach to designing executive engines of anthropomorphic robots on power slips
The paper describes a technique for calculating the transfer function of the executive motor of the lower limb of an anthropomorphic robot on the basis of power shell elements.
Текст научной статьи О применении перспективного подхода к проектированию исполнительных двигателей антропоморфных роботов на силовых оболочках
На сегодняшний день существует множество различных видов робототехнических систем, в которых применены разные типы приводов и типовые кинематические схемы. В то же время разработчики этих систем не очень активно применяют в своих разработках новые виды приводов, предпочитая им традиционные. Такая ситуация значительно замедляет появление на рынке новых разработок. В связи с появлением в конце прошлого века значительного числа исследований, посвященных силовым оболочковым элементам, которые практически копируют работу мышц человека и не нуждаются в применении редукторов для преобразования вида движения и его скорости. Данные СОЭ, по существу, представляющие силовую часть исполнительного двигателя, являются силовыми оболочковыми бесштоковыми пневмоцилиндрами (СОБПЦ) тянущего типа. СОБПЦ вместе с электропневматическим дроссельным распределителем (ЭПДР) представляет собой высоко динамичный исполнительный двигатель. На базе этих СОБПЦ можно скомпоновать ис- полнительный двигатель двустороннего действия и одностороннего с возвратной пружиной, которые применительно к манипуляторам могут обслуживать одну степень подвижности [1, 2].
К их достоинствам можно отнести высокие значения развиваемого усилия, особенно в начальном положении, отсутствие объемных потерь, высокую удельную мощность и отсутствие сухого трения и люфтов между перемещающимися частями. К основным недостаткам можно отнести относительно малое перемещения СОЭ и существенное падение развиваемого усилия при сокращении СОЭ.
Построение привода на СОЭ
Поскольку СОЭ являются элементами одностороннего действия, то им требуется наличие некоторого возвратного устройства в виде дополнительного СОЭ или других механизмов. Наиболее простой является схема, когда возвратное движение осуществляется под действием силы тяжести объекта управления. На рис. 1 представлены основные варианты построения привода на СОЭ [3].
Рис. 1. Варианты построения привода на СОЭ
Рис. 2. Расположение СОЭ относительно звеньев
На рис. 2 показан вариант схемы привода на СОЭ, который в дальнейшем будет исследован при создании схемы организации движения нижней конечности. Две группы пневмомускулов (ПМ) включены по дифференциальной схеме. ПМ 1 работают в одном направлении, ПМ2 работают в противоположном направлении. При подаче сжатого воздуха из магистрали нагнетания через дроссельный распределитель в ПМ 1 с одновременным сбросом отработанного воздуха из ПМ2, ПМ 1 начинает сокращаться, развивая значительное тянущее усилие, пропорционально разности усилий, развиваемых этими ПМ. За счёт этого усилия голень начинает подниматься. И наоборот, при сокращении ПМ2 голень начинает опускаться.
Составления передаточной функции для СОБПЦ
Общий вид передаточной функции по управлению имеет вид:
( ) упр ( )= ( )
= ( +2 +1)
х И/др(s)
где: W дР ( 5 ) - передаточная функция ЭПДР; U ( 5 ) - изображение по Лапласу напряжения на входе в ДР; купр - коэффициент передачи по управлению; Т -постоянная времени; ^ - коэффициент затухания, в соответствии с []:
, _ к8рСр Ьц упр=(1+ )рт×100%;
1+ 100%; тр
2 I kFm(1 + к5рСрСр)100% где kF - силовой коэффициент; крр -коэффициент зависимости изменения сокращения от изменения объема; Ср-коэффициент расширения газа относительно давления; Ср-коэффициент расширения газа относительно сокращения ПМ.
Используя исходные данные, взятые из технического задания: масса объекта, частота вращения, параметры СОЭ, и т.д. Далее произведем расчет параметров, необходимых для нахождения коэффициентов передаточной функции:
-
• Используя рисунок 3, находим значение радиуса оболочки в рабочей точке грт
-
• При помощи рисунка 4, находим значение коэффициента k VV
-
• Вычисляем объем СОЭ в рабо-
- чей точке Vрт = кГКПГрт L н
5 "
100% ,
1 —
-
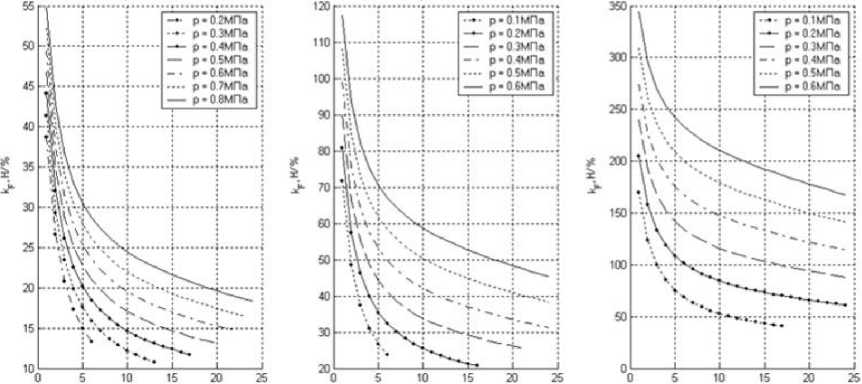
• Из таблиц 1, 2 и рисунков 5, 6
определяем численные значения , ,
, .
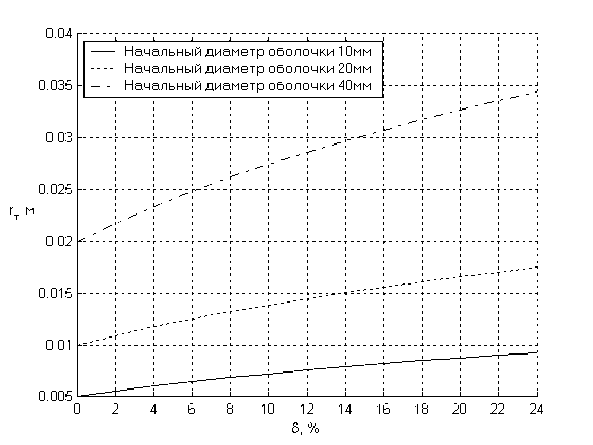
Рис 3. Зависимость между радиусом оболочки и ее сокращением
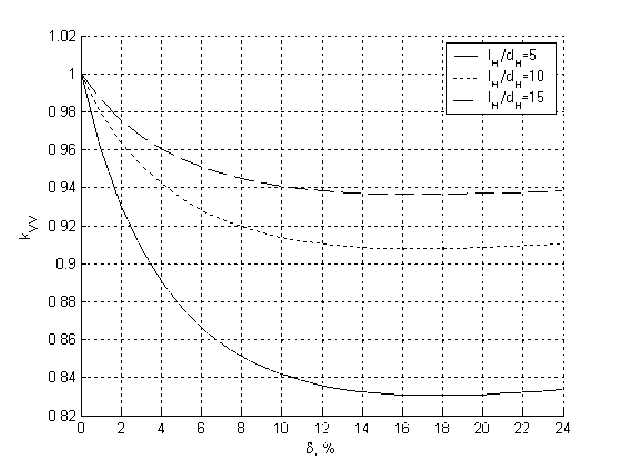
Рис. 4. Значение коэффициента k VV
Таблица 1
|
С p , МПа |
Давление внутри оболочки СОЭ (МПа) |
|||||||
|
0.1 |
0.2 |
0.3 |
0.4 |
0.5 |
0.6 |
0.7 |
0.8 |
|
|
Для изотермического процесса |
||||||||
|
0.049 |
0.1.21 |
0.204 |
0.295 |
0.394 |
0.498 |
0.607 |
0.720 |
|
|
Для адиабатического процесса |
||||||||
|
0.049 |
0.099 |
0.149 |
0.199 |
0.248 |
0.298 |
0.348 |
0.398 |
|
Таблица 2
|
Типо-раз-мер ПМ |
Относительное сокращение оболочки СОЭ δ (%) |
||||||||||
|
0 |
2 |
4 |
6 |
8 |
10 |
12 |
14 |
16 |
18 |
20 |
|
|
Ø10 мм |
0.311 |
0.245 |
0.200 |
0.168 |
0.143 |
0.124 |
0.108 |
0.095 |
0.084 |
0.075 |
0.067 |
|
Ø20 мм |
0.262 |
0.212 |
0.176 |
0.150 |
0.129 |
0.113 |
0.099 |
0.088 |
0.078 |
0.070 |
0.062 |
|
Ø40 мм |
0.248 |
0.202 |
0.170 |
0.145 |
0.125 |
0.109 |
0.096 |
0.085 |
0.076 |
0.068 |
0.061 |
5. % 6. % б. %
Рис. 5. Значение коэффициента жесткости k F .
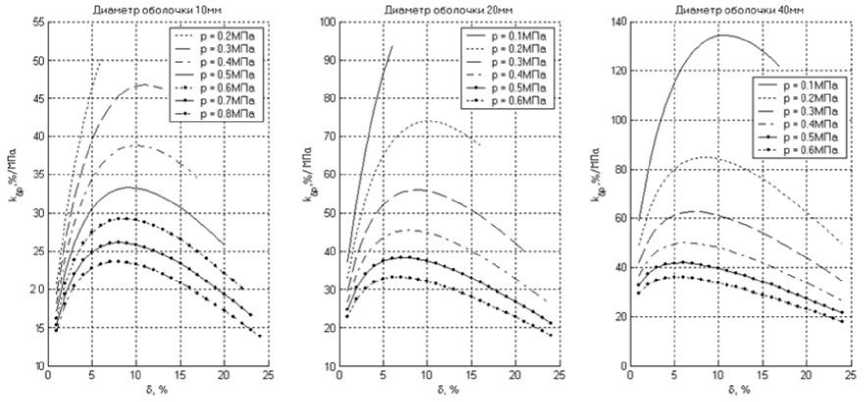
Рис. 6. Значение коэффициента k δ p
-
• Из полученных данных, находим передаточную функцию СЧ СОБПЦ с конкретными значениями параметров.
-
• Составляем структурную схему соответствующей системы управления приводом (рис. 7).
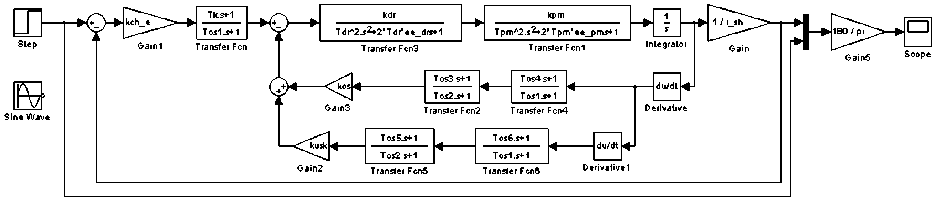
Рис. 7. Структурная схема скорректированной системы управления
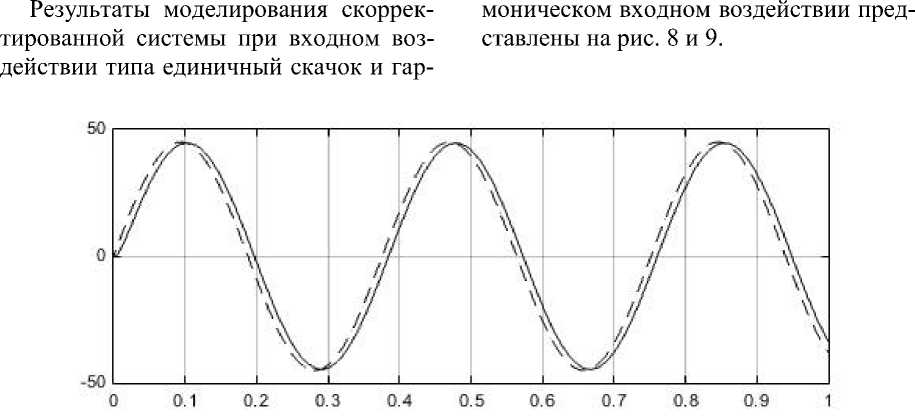
Рис. 8. График переходного процесса при подаче на вход системы
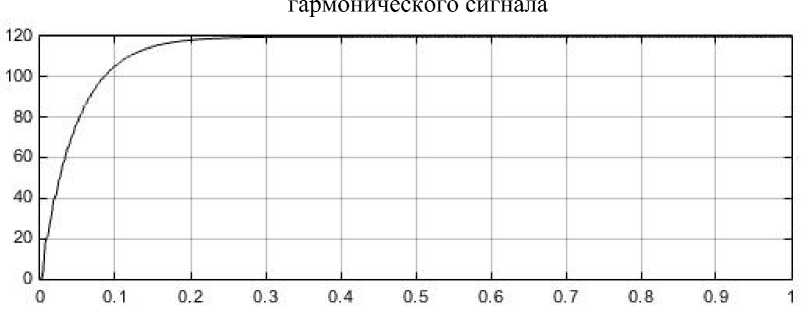
Рис. 9. График переходного процесса при подаче на вход системы сигнала типа единичный скачок
Из результатов моделирования вид- близки к возможностям человеческого но, что динамические показатели ко- сустава. ленного сустава по каналу управления
Список литературы О применении перспективного подхода к проектированию исполнительных двигателей антропоморфных роботов на силовых оболочках
- Пневмомускул MAS [Электронный ресурс] / Festo: [сайт] - Режим доступа:http://www.festo.com/cat/ru_ru/data/doc_ru/PDF/RU/MAS_RU.pdf, свободный. (дата обращения 05.05.2018)
- Шароватов, В. Т., Лошицкий, П. А. Математическая модель силового бесштокового пневмоцилиндра одностороннего действия.
