О принципах классификации систем активной компенсации низкочастотного шума и вибрации

Автор: Васильев А.В.
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Механика и машиностроение
Статья в выпуске: 4 т.8, 2006 года.
Бесплатный доступ
Рассматривается предлагаемая автором систематизация классификационных признаков и ти- пов классификации систем активной компенсации низкочастотного шума и вибрации. Системати- зируются такие классификационные признаки, как периодичность заглушаемого сигнала, сферу действия активнйо компенсации, направленность приемников и излучателей, тип заглушаемого и компенсирующего сигналов, конструктивное исполнение, тип формирования компенсирующего сигнала, тип используемого компенсирующего источника, тип входного и выходного сигналов, многомерность эффекта компенсации, тип пространства, область применения, сочетание с пас- сивными методами и др.
Короткий адрес: https://sciup.org/148197883
IDR: 148197883 | УДК: 504.06:534:83
About the principles of classification of the systems of active compensation of low frequency noise and vibration
Author suggests systematization of classification principles and types of classifications of the systems of active compensation of low frequency noise and vibration. Such classification principles are systematized as sphere of acting of active signal, directivity of sensors and emitters, type of cancelled and compensating signals, type of the space of compensation, field of application etc.
Текст научной статьи О принципах классификации систем активной компенсации низкочастотного шума и вибрации
Тольяттинский государственный университет
Рассматривается предлагаемая автором систематизация классификационных признаков и типов классификации систем активной компенсации низкочастотного шума и вибрации. Систематизируются такие классификационные признаки, как периодичность заглушаемого сигнала, сферу действия активнйо компенсации, направленность приемников и излучателей, тип заглушаемого и компенсирующего сигналов, конструктивное исполнение, тип формирования компенсирующего сигнала, тип используемого компенсирующего источника, тип входного и выходного сигналов, многомерность эффекта компенсации, тип пространства, область применения, сочетание с пассивными методами и др.
Принцип активной компенсации шума и вибрации, заключающийся в интерференции колебаний источника и компенсирующего источника в противофазе с использованием дополнительной энергии для формирования компенсирующего звукового излучения известен давно. Первые патенты по идее активной компенсации шума путём интерференции с антифазной звуковой волной были получены Хенри Коанда [6, 7], причем заявка на самый ранний из них была подана 21 октября 1930 г., а сам патент выдан 29 декабря 1931 г. Коанда в своих заявках утверждал, что беспокоящий шум может быть заглушен путём интерференции со звуковой волной в противофазе и предложил две реализации (одна чисто пассивная и одна электронная). Однако предложенные Х. Коанда устройства были акустически некорректны и не годились даже для демонстрационных экспериментов. Поэтому общепризнанным родоначальником метода активной компенсации считается Поль Луэг, подавший заявку на патент 27 января 1933 года (дата приоритета) и получивший патент 9 июня 1936 года, см. [10]. П. Луэг выдвинул основную идею активной компенсации как суперпозицию с фазоинвертированной копией и описал её для одно- и трёхмерных звуковых полей, а также предложил экспериментальные установки по активному подавлению шума. Предложения Луэга были более реалистичны и акустически корректны, но всё ещё далеки от использования на практике.
Первая техническая реализация системы активной компенсации шума появилась в 1953 г. и приведена в работах Олсона и Мэя. Реализованное противозвуковое устройство (“электронный звуковой абсорбер”) состоит из микрофона, соединенного с динамиком через электронный контроллер так, что он создает вблизи микрофона акустическое давление, равное и противоположное падающей волне. Х.Ф. Олсон разработал и лабораторные установки, демонстрирующие впервые практическую осуществимость активного шумоглушения. Достигался эффект уменьшения звукового давления вблизи микрофона в области низких частот на 10-25 дБ в 23х октавной полосе.
Авторами последующих ранних патентов были французские ученые М. Брют де Ремур и М. Джессель (патент по компенсации звуковых волн, излученных от задаваемого распределения источника путём использования ряда источников Гюйгенса (монополи плюс диполи), распределённых вдоль закрытой оболочки, окружающей первичные источники, сейчас известный как так называемая JMC теория (по Джесселю, Мажану и Каневету).
Бурное развитие техники в 60-70-е гг., сделавшее возможной реализацию оптимальных по быстродействию и качеству алгоритмов управления, обусловило значительный прогресс в технической реализации метода управляемого активного гашения. Как след- ствие, после этих первых патентов наблюдался целый всплеск в области разработки устройств активной компенсации и их последующего патентования. Однако все эти патенты всё ещё не используются коммерчески.
Практическое использование активной компенсации шума (и частично активной компенсации вибрации) стало возможным только с появлением в 80-х гг. современной цифровой электроники, в частности, адаптивной цифровой обработки сигналов. Были получены патенты по устройствам и улучшенному алгоритму активной компенсации шума в каналах. Коммерческие разработки предлагаются в США компаниями Nelson Industries, Digisonix Division, в Японии компанией Hitachi, а также рядом других компаний. Цифровая техника сделала возможным значительный прогресс в развитии технических средств активного ослабления. Как отмечает M. Jessel [8], количество публикуемых работ по данной проблеме (в среднем за 10 лет) было: 3 работы в год в 50-е, 15 работ в год в 60-е, 60 в год в 70-е и 120 в год в 19801985 гг. В настоящее время публикуется свыше двухсот работ в год, а монографии, посвященные исследованию данного вопроса, содержат до 1700 ссылок. Появился ряд новых областей использования активной компенсации. В связи с этим возникает необходимость разработки и систематизации принципов классификации активной компенсации.
Предлагаемая автором систематизация классификационных признаков и типов классификации приведена в табл. 1.
По периодичности заглушаемого сигнала возможно деление систем активной компенсации на две категории: подавление периодических (или импульсных) шумов и непериодических. Заметим, что большинство низкочастотных шумов и вибраций энергетических установок (например, шум систем всасывания или выпуска автомобильных ДВС) являются периодическими.
По сфере действия можно выделить системы активной компенсации шума и вибрации в каналах (трубах), пространственные системы активной компенсации и индивидуальную электронную защиту от шума и вибрации.
Некоторые авторы делят системы актив- ной компенсации шума и вибрации по принципу направленности приемников и излучателей (вектор или скаляр).
Возможна также классификация по типу компенсирующего сигнала : монопольный источник (или их совокупность), диполь, и т.д., либо по комбинации источников различных типов.
Например, M. Jessel и S. Yamada [9] выделяют следующие типы компенсирующих источников для активного поглощения звука в трубе.
1. Монопольный источник
На рис. 1 показан сильносвязанный монопольный источник. Здесь возможна обратная связь между микрофоном и громкоговорителем, для избежания которой можно использовать поглощающие материалы в трубе между микрофоном и громкоговорителем и фильтр.
2. Диполь Свинбенкса
Свинбенкс предложил систему из двух громкоговорителей с использованием замедления для получения однонаправленного источника. Такая система имеет определенные частотные характеристики и может использовать трансформаторы и уравнители (см. рис. 2).
3. ТрипольДжесселя-Мажана-Каневета
Как показано на рис. 3, в данной системе для создания однонаправленного источника используются три громкоговорителя. Однонаправленый источник такого типа применяется для избежания генерирования обратной связи между микрофонами и громкоговорителями. Для образования однонаправленного источника также могут использоваться три микрофона. Модифицированный триполь, содержащий интегрирующее звено, позволяет корректировать частотные характеристики источников. Интегрирующее звено делает характеристики еще более ровными.
По конструктивному исполнению представляется достаточно удобной и полной классификация систем активной компенсации шума и вибрации на адаптивные, неадап-
Таблица 1. Классификационные признаки и типы систем активной компенсации
|
№ п/п |
Классификационный признак |
Типы классификации |
Примеры |
|
1 |
2 |
3 |
4 |
|
1. |
Периодичность заглушаемого сигнала |
Периодические и непериодические |
Шум всасывания или выпуска поршневых машин |
|
2. |
По сфере действия |
- В каналах (трубопроводах, газоводах) |
трубопровод компрессора, вентиляционный канал |
|
- Активная компенсация для плоских поверхностей |
Компенсация НЧ шума, проходящего через окна зданий и сооружений |
||
|
- Активная компенсация внутри замкнутого объема |
Компенсация НЧ шума и вибрации внутри салона транспортного средства |
||
|
- Активная компенсация в открытом пространстве |
Компенсация НЧ шума на открытых территориях лечебных и образовательных учреждений, мест отдыха |
||
|
- Индивидуальная защита от шума и вибрации |
Электродинамические антишумовые наушники |
||
|
3. |
По принципу направленности приемников и излучателей |
Вектор или скаляр |
Решение классических задач |
|
4. |
По типу первоначального (нежелательного) сигнала |
Периодический шум Непериодический шум |
Шум систем газообмена ДВС Шум транспортных потоков |
|
Периодические вибрации |
Вибрации, вызванные пульсациями давления в трубопроводе поршневого компрессора; вибрации, передающиеся от ДВС в салон автомобиля |
||
|
Непериодические вибрации |
Вибрации при работе с отбойным молотком |
||
|
Широкополосный шум |
Шум в производственном помещении |
||
|
Узкополосный (тональный) шум |
Шум вентиляторов, дисковой пилы и др. |
||
|
Широкополосная вибрация |
Вибрация корпуса ДВС |
||
|
Узкополосная (тональная) вибрация |
Вибрация, создаваемая отдельными элементами и системами ДВС |
Таблица 1. Классификационные признаки и типы систем активной компенсации (продолжение)
|
1 |
2 |
3 |
4 |
|
5. |
По типу компенсирующего сигнала |
Монопольный источник (или их совокупность) Дипольный источник Трипольный источник Комбинации источников различных типов |
Однонаправленный громкоговоритель в изолирующей кассете Диполь Свинбенка Триполь Джесселя-Мажана- Каневета Подавление шума и вибрации в открытом пространстве |
|
6. |
По конструктивному исполнению |
Адаптивные замкнутые (обратносвязанные) Адаптивные разомкнутые (переднесвязанные) Комбинированные (обратносвязанные-переднесвязанные) Регенеративные Неадаптивные |
Компенсация широкополосного шума Активная виброизоляция Компенсация периодического шума и вибрации с известным опорным сигналом (снижение шума и вибрации ДВС) Компенсация вибрации трубопроводов силовых установок Автономная самоэнергоприводная поршневая установка Компенсация постоянного периодического шума |
|
7. |
По типу формирования компенсирующего сигнала |
Аналоговые Цифровые |
Подавление тональной гармоники периодического шума Все переднесвязанные контроллеры |
|
8. |
По типу компенсирующего источника |
Традиционные источники Альтернативные источники |
Громкоговоритель Осциллирующий клапан |
|
9. |
По входному и выходному сигналам |
Одиночный вход и выход (SISO-системы) Многократный вход и выход (MIMO-системы) |
Подавление тонального шума Широкополосное подавление |
Таблица 1. Классификационные признаки и типы систем активной компенсации (продолжение)
Адаптивные системы можно подразделить на адаптивные замкнутые (обратносвязанные) системы, адаптивные разомкнутые (переднесвязанные) и комбинированные (об-ратносвязанные-переднесвязанные).
Все обратносвязанные системы являются адаптивным замкнутыми. В типичной адаптивной замкнутой системе измеряется некоторое выходное количество (например, уровень звука выходного сигнала) и сравнивается с величиной, которую необходимо достичь, при этом результирующая погрешность используется для корректировки выходного сигнала системы.
Адаптивные замкнутые системы, реализующие принцип Гюйгенса-Малюжинца, содержат приемники и излучатели монопольного и дипольного типов, обладающие свойством однонаправленного приема или излу-
Таблица 1. Классификационные признаки и типы систем активной компенсации (окончание)
|
13. |
По области применения (промышленного, бытового) |
Снижение шума и вибрации в пассажирском салоне транспортного средства: - самолеты;
|
Шум и вибрация в пассажирском салоне автомобиля |
|
Снижение шума и вибрации, излучаемого энергетической установкой в окружающую среду |
Шум выхлопа автомобильного ДВС |
||
|
Снижение шума и вибрации в производственном помещении - от компрессоров; - от вентиляторов и пр. |
Шум и вибрация поршневого компрессора |
||
|
Снижение шума и вибрации ограждений |
Вибрация маловесного ограждения |
||
|
Снижение шума и вибрации электрических машин |
Шум трансформатора |
||
|
Снижение вибрации различных колебательных систем |
Активная виброподвеска автомобиля |
||
|
Снижение шума и вибрации в зданиях и сооружениях |
Снижение шума внутри помещения |
||
|
Индивидуальная защита от шума и вибрации |
Электронные наушники для водителей и пассажиров |
||
|
14. |
По сочетанию с пассивными методами |
Полностью активные |
Компенсация шума выпуска автомобильного ДВС на основной частоте работы двигателя |
|
Гибридные (пассивно активные) |
Снижение структурного шума ДВС |
чения. Техническая реализация таких систем предполагает:
-
а) . непрерывное распределение приемников и излучателей, т.е. бесконечное их число.
-
б) . связь каждого приемника и излучателя со всеми другими приемниками и излучателями.
-
в) . полное отсутствие обратной связи между приемниками и излучателями.
Обратносвязанные системы активной компенсации отличаются от переднесвязанных методом получения заглушающего сигнала. Если переднесвязанные системы компенсации основаны на предсказании посту-
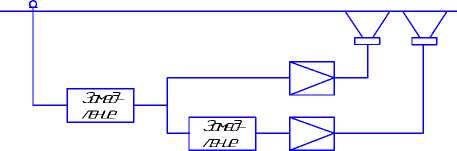
Рис. 2. Диполь Свинбенкса
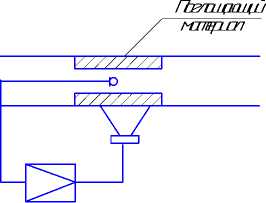
Рис. 1. Сильносвязанный монопольный источник
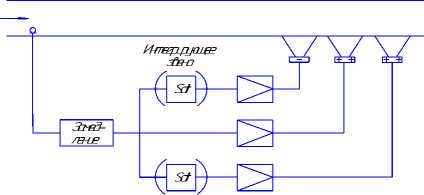
Рис. 3. Триполь Джесселя-Мажана-Каневета
пающего нежелательного звука или вибрации для генерирования надлежащего компенсирующего сигнала, то обратносвязанные используются для компенсации результирующих эффектов нежелательного воздействия уже после того, как оно прошло. Поэтому обратносвязанные системы наиболее подходят для компенсации шума и вибрации при переходных характеристиках систем, в то время как переднесвязанные системы лучше использовать для компенсации при установившем состоянии заглушаемого звука или вибрации. В структурах и акустических пространствах обратносвязанные контроллеры эффективно дополняют модальное демпфирование. При использовании в газоводной системе энергетической установки (рис. 4) обратносвязанный контроллер также отражает поступающие волны путём импеданса стенки канала на громкоговорителе. Таким образом, в отличие от переднесвязанных систем, для которых физическая система и контроллер могут быть оптимизированы отдельно, обратносвязанные системы должны быть разработаны путём рассмотрения физической системы и контроллера как единого целого.
Из рис. 4, можно увидеть, что компенсирующий сигнал создается путём фильтрования сигнала погрешности (а не путём фильтрования опорного сигнала как в переднесвязанном контроллере). В системах активной компенсации шума и вибрации характеристики систем обратносвязанной компенсации выбираются так, чтобы с учетом измерений на датчике погрешности возвратить систему в её невозмущённое состояние как можно быстрее.
Если нужно снизить широкополосный случайный шум, то необходимо получить опорный сигнал, находящийся в определённой связи со всеми компонентами первично-
Пербичный шум
л iso6оа
Микрофон г погрешности о
Ь Физическая система
Источник НЧзбуко
Сигнал ошибки
Электронный
У контроллер
Контрольный сигнал
Компенсирующий фильтр
Рис. 4. Обратносвязанная система активной компенсации плоской звуковой волны в канале го сигнала. Для случая снижения шума в канале это может быть сделано путем замены тахометра микрофоном в канале, как показано на рис. 4.
Е р = 41 2"' / P ( x , ® )2 ' dV
4 ρc 0 V
Широкое применение получили разновидности адаптивных замкнутых систем, работающие не в распространяющихся по определенным направлениям волнах, а в установившихся полях по минимизации потенциальной энергии в некоторых областях помещений. Теоретически эти системы снижают потенциальную энергию путем минимизации суммы квадратов давлений p (x, w) в конечном числе точек. Разлагая комплексную амплитуду давления в ряд по функциям
N
P ( x , to ) = ^ ^ n ( x ) • a n ( to )
n = 0
и Е р = 2 '! P ( x , to ) • dV , записывая E в
4 ρc 0 V , p
V N 2
виде Е p = ” г " ^ a n ( to ) , можно получить 4 P 0 c 0 n = 1
выражение минимальной потенциальной энергии в матричном виде как решение задачи оптимального управления. Теоретическая основа таких систем довольно громоздка и предполагает матричную реализацию алгоритма минимизации некоторого функционала (в данном случае потенциальной энергии).
Значительный вклад в разработку адаптивных замкнутых систем внесли из российских ученых: Г.Д. Малюжинец, В.В. Тютекин, М.П. Завадская, А.А. Мазанников и др., из зарубежных: G. Warnaka, M. Jessel, G. Mangiante, G. Canevet, J. Tichy, A. Roure, C. Ross, P. Nelson и др.
К адаптивным замкнутым системам можно отнести и системы активной виброизоляции, разработку и исследование которых осуществляли М.Д. Генкин, В.Г. Елезов, Р.В. Яблонский, T. Rockwell, M. Prasad, I. Ballo, N. Tanaka, R. Smith, и др. В системах такого типа могут устанавливаться датчики силы и вибрации в опоры или параллельно опорам работающих механизмов, и путем управле- ния вибраторами уменьшается сила, передаваемая на опоры механизмов. При высокой статической жесткости опор можно достигнуть их высокой динамической податливости, и наоборот, т.е. происходит активная компенсация динамических реакций в опорах механизмов.
В области структурной вибрации использование обратносвязанной компенсации было популярным ввиду способности сглаживать структурные вибрации без необходимости предварительного измерения опорного сигнала.
В общем случае выход системы компенсации не оказывает влияния на контрольный вход, и такая система называется адаптивной разомкнутой. Блоковая диаграмма типичной разомкнутой системы компенсации показана на рис. 5. Здесь желаемый выходной сигнал (опорный вход) подается на контроллер для формирования контрольного (заглушающего) входа в динамическую систему (в энергетическую установку).
Адаптивные разомкнутые системы стали развиваться как системы снижения шума и вибрации, как правило, от одного источника, в узких полосах частот. Разомкнутость в таких системах понимается как разомкну-тость по управляющему параметру и замкнутость по специальному сигналу управления. Например, на управляемые возбудители (вибраторы или громкоговорители) подается гармонический сигнал с датчика оборотов, а фаза и амплитуда этого сигнала регулируются через микропроцессор приемниками (вибродатчиками или микрофонами). Из ученых, занимавшихся данной проблемой, следует отметить Б.Д. Тартаковского, А.И. Вя-лышева, Г.С. Любашевского, В.В. Малахова, G. Chaplin, T. Kosaka, S. Yamada, W. Hong, K. Eghtesadi, H. Leventhall, и др.
Как правило, адаптивными разомкнутыми системами являются переднесвязанные системы компенсации. Переднесвязанные контроллеры (все они являются цифровыми) основаны на доступности опорного сигнала, который является мерой поступающего нежелательного воздействия (шум или вибрация). Этот сигнал должен быть получен контроллером за время, достаточное для того,
|
Желаемый быходной |
Контрольный |
Выходной |
||
|
сигнал |
Система |
бход |
Устанобка |
сигнал |
|
контроля |
||||
Рис. 5. Адаптивная разомкнутая система компенсации чтобы можно было генерировать и передать в источник анти-звука сигнал заглушения с необходимыми для получения эффекта компенсации нежелательного воздействия характеристиками. При этом опорный сигнал генерируется от нежелательного воздействия.
Для стационарных или медленно изменяющихся периодических нежелательных звуковых или вибрационных воздействий эта ограниченность во времени для выработки необходимого компенсирующего сигнала не проявляется, так как сигнал за некоторый период будет в высокой степени схож с сигналом предыдущего периода. Поэтому с достаточной степенью приближения можно получить опорный сигнал для периодического нежелательного воздействия в целом.
Более сложной является задача снижения случайного или непериодического нежелательного воздействия. Однако если оно распространяется в ограниченном пространстве, как, например, канал, то получение достаточного для эффективной компенсации опорного сигнала возможно. В этом случае измерение впереди по направлению распространения может использоваться для предсказания нежелательного воздействия в некотором месторасположении сзади распространения в более позднее время.
Отметим следующие важные особенности систем переднесвязанной компенсации: опорный сигнал подается от микрофона, установленного в канале; сигнал будет подвергаться загрязнению (искажению) от распространяющегося вперед по направлению распространения нежелательного воздействия; воздействие должно учитываться при дизайне системы. Система активной компенсации, предложенная в патенте П. Луэга [2], была переднесвязанной, так как производила компенсирующий сигнал в противофазе к заглушаемому первоначальному сигналу в зоне компенсации. Однако при использовании такой стратегии компенсации отсутствует возможность отслеживания изменений в системе, и после определенного периода времени эффект компенсации может быть значительно снижен.
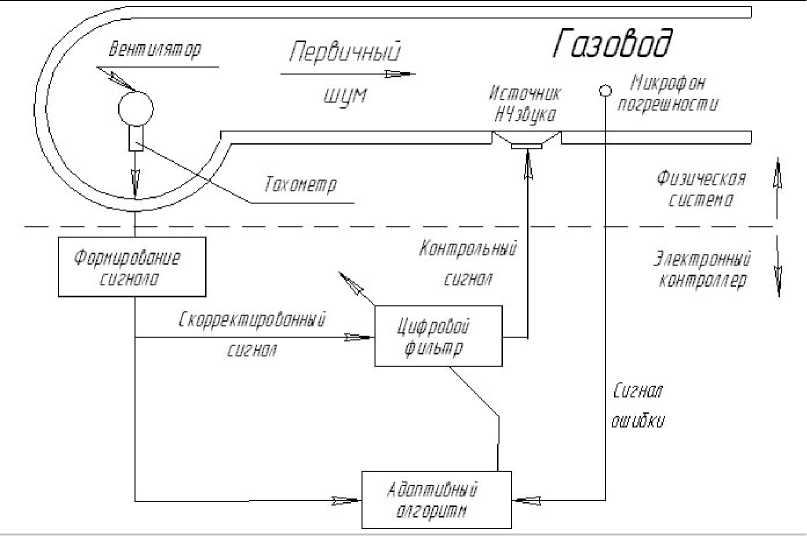
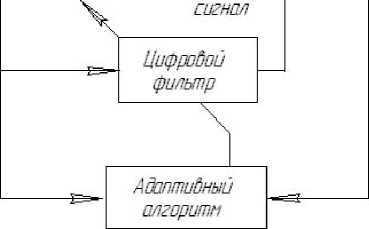
Цифровая переднесвязанная система компенсации, изображённая на рис. 6 а, особенно эффективна для компенсации тональных составляющих низкочастотного шума в канале, генерируемого вентилятором (в этом случае тональные частоты могут быть равными основной частоте и ее гармоникам). В этом устройстве выходной сигнал тахометра синхронизирован с вращающимся валом вентилятора, генерирующего периодический первичный шум. Электронный блок преобразует сигнал тахометра в комбинацию синусоид, что позволяет сформировать компенсирующий сигнал для снижения шума на основной частоте вращения вентилятора и на кратных ей гармониках.
Для того чтобы генерировать подходящий сигнал для подавления нежелательного источника, опорный сигнал (см. рис. 6 а) передаётся через цифровой фильтр для генерирования результирующего компенсирующего сигнала, который подается на источник активного излучения звука, излучающий звук в канал. Современная практика предполагает использование адаптивного алгоритма (рис. 6 а и б) для регулирования характеристик адаптивного фильтра с целью минимизации результирующего нежелательного воздействия в области до распространения потока, масштаб воздействия при этом является величиной квадратичного сигнала, определённого с помощью микрофона погрешности. В этом случае весовые характеристики фильтра изменяются во временных рамках согласно степени цифрового отбора проб, и достигаются намного лучшие результаты.
б)
а)
Первичный шум । —
Корректирующий микрофон
Лоз об од
Источник р Микрофон инфрозбука погрешности

J
Физическая система
Скорректированный сигнал
Контрольный
Электронный контроллер
Сигнал ошибки
Рис. 6. Активная компенсация плоской звуковой волны в каналах с использованием переднесвязанных систем: а – переднесвязанная система с сигналом тахометра для опорного ввода контроллера; б – переднесвязанная система с сигналом микрофона для опорного ввода контроллера
Для переднесвязанных систем исполнение физической системы может быть оптимизировано независимо от контроллера. Если было бы возможным получать опорный сигнал достаточно далеко впереди от места действия активного источника компенсации, то переднесвязанная компенсация была бы более предпочтительна по сравнению с обратносвя- занной компенсацией ввиду стабильности характеристик и обычно более лучшего исполнения. К сожалению, во многих случаях невозможно достичь получения надлежащего опорного сигнала, как, например, в тех случаях, когда резонансную характеристику импульсивно возбуждаемой структуры. В таких случаях системы обратносвязанной компенса- ции являются единственной альтернативой.
В ряде случаев, ввиду имеющихся недостатков применения переднесвязанных и обратносвязанных контроллеров, возникает необходимость использования комбинированных (обратносвязанных - переднесвязанных) систем компенсации. Примером такой ситуации может служить космический летательный аппарат, где возникает установившийся нежелательный сигнал от разбалансировки вращающегося оборудования на борту летательного аппарата (например, руля контроля положения летательного аппарата, насосов и пр.). Если эти нежелательные сигналы лежат близко от обратносвязанной системы направленной компенсации, то они могут негативно влиять на точность формирования активного сигнала. С другой стороны, поскольку скорость вращения колеса может быть использована как опорный сигнал, то можно применить переднесвязанный контроллер для подавления эффекта дисбаланса. Это приводит к идее объединения обратносвязанной и переднесвязанной компенсации (так называемой гибридной компенсации).
Существует множество примеров практического применения, где комбинированная компенсация оказывается высокоэффективной. Например, это объединение обратносвязанного активного демпфирования и переднесвязанного подавления вибрации. Привлекательной особенностью комбинированной компенсации является и то, что переднесвязанный и обратносвязанный контроллеры могут использовать один и тот же набор источников и датчиков.
Рассмотрим незначительно демпфированный стержень. Он представляет собой множество жестких поддерживающих структур, используемых во многих случаях применения (испытательный стенд, промышленный станок). Необходимо снизить микровибрацию, производимую неизвестной импульсной нагрузкой и установившимися постоянными нежелательными вибрациями с известным опорным сигналом (как, например, несбалансированные нагрузки). В этом случае может быть использован комбинированный контроллер, объединяющий активное обратносвязанное демпфирование с переднесвя- занным контроллером, действующим на широком диапазоне частот.
Для регенеративных систем работа активного компенсатора может быть обеспечена без внешнего источника энергии. Например, регенеративная система может состоять из генератора, контроллера, накопительного устройства и устройства распределения энергии. Устройства распределения энергии направляют энергию в накопитель, где имеется дополнительная энергия, либо направляют накопленную энергию в генератор. Регенеративная система возможна только тогда, когда имеющаяся в системе дополнительная энергия больше, чем энергия, необходимая для системы активного контроля. Использование регенеративных систем активной компенсации представляется весьма привлекательным, так как работа активного компенсатора может быть обеспечена без внешнего источника энергии. Таким образом, эти системы могут являться полностью автономными и самоэнергоприводными.
Неадаптивные системы, т.е. системы, настроенные и работающие по заранее определенным постоянным параметрам, в основном интенсивно исследовались в ранние годы развития активной компенсации. Неадаптивные контроллеры характеризуются фиксированными цифровыми фильтрами, параметры которых определяются путем использования анализа акустической системы или путем использования метода проб и погрешностей таким образом, чтобы сигнал на микрофоне погрешности сводился к минимуму. Конструктивная схема неадаптивной переднесвязанной системы компенсации показана на рис. 7. К сожалению, физическая акустическая или вибрационная система, для которой следует достичь снижения, редко остается точно такой же в течение долгого времени (так как даже небольшие изменения температуры или скорости потока значительно изменяют скорость звука), что приводит к большим фазовым погрешностям между желаемым и фактическим заглушающими сигналами. Предпринимались попытки преодолеть эту проблему путём получения необходимых весовых характеристик фильтра на основе повторения, базируясь на измере-
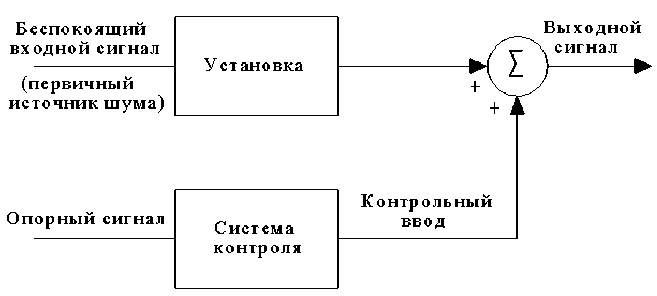
Рис. 7. Неадаптивная переднесвязанная система компенсации
нии среднеквадратичной скорости сигнала на микрофоне погрешности. Однако в современной практике случаев использования неадаптивных систем активной компенсации не отмечается.
Следует отметить, что можно предложить и некоторые другие подходы к классификации в соответствии с типом конструкции систем активной компенсации шума и вибрации. Например, системы активной компенсации могут быть разделены в зависимости от набора взаимодействующих индивидуальных компонентов. При таком подходе можно выделить три основных категории систем активной компенсации: акустическая, структурная и структурно-акустическая. Каждая из этих систем при работе с некоторой формой возбуждения нежелательного звукового или вибрационного сигнала будет создавать компенсирующий сигнал с определенными характеристиками. Возбуждения нежелательного и компенсирующего сигналов классифицируются как входные источники нежелательного воздействия (или первичные источники) и компенсирующие входы. Примером акустической системы является газо-вод энергетической установки, примером структурной системы – стержень, где входное нежелательное воздействие создает вибрации. Примером структурно-акустической системы является пассажирский салон самолета, где входное нежелательное воздействие создает внешнее акустическое поле и вибрации фюзеляжа, генерирующие нежелательное акустическое воздействие в салоне.
По типу формирования компенсирующего сигнала системы активной компенсации делятся на аналоговые и цифровые. Аналоговые системы использовались в основном в ранние годы исследования систем активной компенсации (до 1980-х гг.). Однако и в настоящее время аналоговые системы можно эффективно использовать для подавления тональной гармоники периодического шума [11, 12]. Аналоговые электрические устройства содержат усилители и фазовращатели, которые в ряде случаев могут регулироваться «вручную» по результатам измерений механических колебаний и звуко-вого поля. При увеличении числа каналов ручное управление становится затруднительным и используется автоматическое управление, где в ка--честве опорных берутся сигналы, поступающие от приемников системы. Такие автоматизированные замкнутые системы могут следить за пер-вичным звуковым полем или механическими колебаниями, изменяя электрические сигналы, подаваемые на излучатели в соответствии с изменившимися показаниями контрольных точек. Цифровые системы отличаются высоким эффектом компенсации, возможностью формирования компенсирующего сигнала, максимально учитывающего характеристики первичного (заглушаемого) виброакустического воздействия, более высоким быстродействием настройки системы и ее последующей перенастройки в режиме слежения за первичным полем, возможностью изменения самого алгоритма управления системой и др. К цифровым относятся все переднесвязанные контроллеры. Вместе с тем, стоимость цифровых контроллеров пока остается достаточно высокой.
По типу источника активной компенса- ции можно выделить традиционные источники (электродинамические громкоговорители) и альтернативные (осциллирующие клапана и заслонки, аэроакустические громкоговорители). Наиболее часто используемый источник активного компенсирующего излучения – это громкоговоритель. Однако существенным недостатком громкоговорителя при его практическом использовании является уязвимость к воздействию факторов внешней среды, например, высокой температуры, влажности, давления и др. Средний срок работы громкоговорителей в промышленных условиях – три года. В настоящее время разработаны конструкции громкоговорителей, устойчивых к воздействию высокой температуры, но они относительно дорогие. Другим недостатком при использовании громкоговорителей является тот факт, что они недостаточно эффективны для компенсации низкочастотного шума, если не имеют больших размеров. В связи с этим возникла необходимость разработки альтернативных источников, способных генерировать высокий уровень звукового давления в низкочастотном диапазоне звука и имеющих повышенную устойчивость к воздействию внешних факторов. Одним из таких источников является рупор. Другой пример – осциллирующий клапан или заслонка.
Классификация систем активной компенсации может учитывать тип входного и выходного сигналов. По этому признаку различают системы с одиночным входом и одиночным выходом (SISO-системы) и системы многократного входа - многократного выхода (MIMO-системы). SISO-системы (рис. 8) работают эффективно только до первой моды критической частоты. MIMO-системы (рис. 9) позволяют осуществлять многомодовую компенсацию, но требуют гораздо более сложных конструкций контроллеров.
По многомерности эффекта компенса- ции системы активной компенсации можно разделить на одномерные (например, активная компенсация шума в каналах), плоские (например, активная компенсация вибрации на плоской поверхности) и трехмерные (например, активная компенсация шума в помещении).
По типу расположения и соединений датчиков первичного звука и вибрации и датчиков в контрольных точках системы активной компенсации можно различать по конфигурации расположения приемников и излучателей, по схеме электрических соединений, а также по типу управления сигналами. В одноканальной системе (приемник – усилитель – излучатель) при компенсации стационарного поля управление (регулировка амплитуды и фазы) может быть ручным. В многоканальной системе управление производится с помощью аналоговых электронных преобразователей или с использованием микропроцессоров.
Структура многоканальной системы компенсации механических колебаний произвольной структуры или звукового поля с произвольным числом приемников (микрофонов, виброприемников) и датчиков (измерителей, вибраторов, громкоговорителей) характеризуется совокупностью передаточных функций, представляющих собой отношение величины колебательного параметра структуры в одной из ее точек xпj, где расположен один из приемников, к соответствующему значению того же параметра в месте возбуждения колебаний структуры датчиками компенсирующей системы xдi.
При компенсации звуковых полей применяют приемники и излучатели с характеристиками направленности, ориентируя их в противоположные стороны, чтобы избежать попадания звуковых волн, излученных громкоговорителями на микрофоны системы. В этих же целях располагают микрофоны и громкоговорители по разные стороны изоли-

Рис. 8. Система с одиночным входом и одиночным выходом
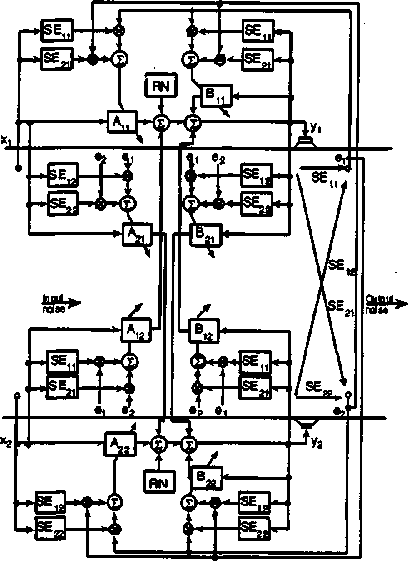
Рис. 9. Переднесвязанная система многократного входа - многократного выхода (MIMO-система) [5]
рующих преград, в том числе устанавливая между ними экраны. При компенсации вибрации структуры ослабляют сигнал вибратора в точке расположения виброприемника с помощью искусственного увеличения потерь на пути между вибратором и виброприемником методом вибропоглощения и размещения между ними виброизолирующего устройства.
Система компенсации может состоять из одинаковых звеньев и электромеханических преобразователей и располагаться симметрично относительно направления распространения волн. Такую систему реализовать наиболее просто, однако она может быть использована для весьма ограниченного числа случаев.
Особенностью системы с разделенными преобразователями является разделение пре--образователей на две группы, связанные с приемниками и датчиками.
По типу пространства, где происходит активная компенсация, можно выделить заглушение в закрытом (активная компенсация шума и вибрации в помещении, в салоне автомобиля и др.) и открытом пространстве (активная компенсация шума и вибрации в окружающей среде). Как уже было отмечено, наи- более сложным случаем является активная компенсация в открытом пространстве.
По области применения систем активной компенсации можно выделить достаточно большое число случаев:
-
- снижение шума и вибрации в пассажирском салоне транспортного средства, оснащенного энергетической установкой (автомобиля, самолета, вертолета и пр.);
-
- снижение шума и вибрации, излучаемых энергетической установкой в окружающую среду;
-
- снижение шума и вибрации в производственном помещении от различных энергетических установок;
-
- снижение шума и вибрации электрических машин;
-
- снижение вибрации различных колебательных систем, образуемых энергетическими установками;
-
- снижение шума и вибрации в зданиях и сооружениях;
-
- индивидуальная защита от шума и вибрации и др.
Наконец, по сочетанию с пассивными методами можно выделить полностью активные и гибридные (пассивно-активные) системы компенсации звука и вибрации.
Автор благодарит Министерство образования и науки РФ за финансовую поддержку работы в рамках тематического плана НИР.
Список литературы О принципах классификации систем активной компенсации низкочастотного шума и вибрации
- Борьба с шумом на производстве. Справочник под ред. Е.Я. Юдина. Глава 13 (автор Б.Д. Тартаковский). М.: Машиностроение, 1985.
- А.И. Вялышев, А.М. Гаврилов, Г.С. Любашевский, Ю.С. Чони. Синтез системы компенсации вибрационного и звуковых полей//Акустический журнал. 1977. Т.23. Вып. 2.
- А.В. Ломакин, Г.С. Любашевский, А.Н. Орлов, Б.Д. Тартаковский. Устройство для компенсации звукового поля. А.С. СССР N 1067527, MKИ G 10 K 11/00, 1984.
- Р.Н. Старобинский, А.В. Васильев, В.Н. Гордеев, В.В. Васильев. Система активного подавления шума впуска двигателя внутреннего сгорания. Патент РФ N 2096651 С1, 1997.
- C.D. Bremigan, L.J. Eriksson, R.J. Eppli, E.S. Stroup. Future of Active Sound and Vibration Control in Vehicles. Proc. of " ACTIVE 95" International Symposium, Newport Beach, CA, USA, 1995 July 06-08.
- Coanda, H. (France): Procйdй de protection contre les bruits. French Patent No. 722 274. Filed: Oct. 21, 1930. Patented: Dec. 29, 1931.
- Coanda, H. (France): Procйdй et dispositif de protection contre les bruits. French Patent No. 762 121. Filed: Dec. 31, 1932. Patented: Jan. 18, 1934.
- Jessel M. Active noise and vibration control: current tends, permanent aims and future possibilities. "Arch. Acoustics", 1983; 10, N4.
- Jessel M., Yamada S. Active noise control. "Journal Acoust. Soc. Japan (E.)", 8, 4(1987).
- Lueg, P: Verfahren zur Dдmpfung von Schallschwingungen. German Patent No. 655508. Filed: Jan. 27, 1933. Patented: Dec. 30, 1937. Related: Pro cess of Silencing Sound Oscillations. US Patent No. 2,043,416. Filed: March 8, 1934. Patented: June 9, 1936. Priority (Germany): Jan. 27, 1933.
- A.V. Vassiliev Compact Active Noise Control Units for Automobile Intake Low-Frequency Noise: Proc. of ACTIVE 97 Symposium, pp.587-594, Budapest, Hungary, 1997.
- A.V. Vassiliev, R.N. Starobinsky, N.P. Bakharev. Low-Frequency Automobile Intake Noise Reduction Using Active Noise Control Systems. Proc. of 15th International Congress on Acoustics, Trondheim, Norway, 1995 June 26-30, Volume 2.
