О решении задачи оптимального выбора параметров питания линейной индукционной машины генетическим алгоритмом с локальным поиском

Автор: Бежитский С.С., Головенко Е.А., Горемыкин В.А., Первухин М.В.
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Математика, механика, информатика
Статья в выпуске: 4 (30), 2010 года.
Бесплатный доступ
Описывается подход к выбору оптимального варианта параметров питания линейной индукционной машины. Оптимизация структуры проводилась с использованием эволюционного алгоритма глобальной оптимизации с уточнением найденного решения локальным поиском. Установлены полезные свойства целевой функции выбора оптимальной структуры индукционной машины.
Параметрическая оптимизация, численное моделирование, бегущее магнитное поле, линейные индукционные машины
Короткий адрес: https://sciup.org/148176294
IDR: 148176294 | УДК: 519.872
Solving problem of optimal choice of plan linear induction machines power supply characteristics using genetic algorithm with local search
The approach for choice of optimal variant of power supply characteristics of plan linear induction machines (LIM) is described. Optimization of LIM structure is based on usage of evolution algorithm for global optimization with local search for solution improvement. The useful optimization function features for optimal choice of a plan linear induction machines structure.
Текст научной статьи О решении задачи оптимального выбора параметров питания линейной индукционной машины генетическим алгоритмом с локальным поиском
Постановка задачи оптимизации структуры ЛИМ. Линейные индукционные машины (ЛИМ) с повышенным рабочим зазором широко используются в металлургии с целью повышения производительности и энергетической эффективности плавильно-литейных агрегатов. Увеличение рабочего зазора обусловлено необходимостью расположения теплоизоляции между индуктором и рабочим телом (расплавом металла). Наличие в ЛИМ значительного немагнитного зазора определяет особенности их конструкции и режимы работы. В частности, для эффективной работы ЛИМ существенными становятся продольный и поперечный краевые эффекты, которые значительно усложняют расчеты при проектировании и моделировании функционирования ЛИМ классическими методами. Следовательно, возникает необходимость в применении численного имитационного математического моделирования с использованием коммерческих пакетов, которые позволяют учитывать краевые эффекты при изучении процессов, происходящих в ЛИМ [1].
Линейные индукционные машины металлургического назначения предназначены для бесконтактного силового воздействия на расплавы металлов в печах и миксерах с целью их перемешивания, дозирования и транспортировки (рис. 1). Индуктор ЛИМ состоит из ферромагнитного сердечника, собранного из листов электротехнической стали, и многофазной обмотки, расположен- ной в пазах сердечника. Обычно применяют трехфазные обмотки, аналогичные обмоткам нормальных асинхронных машин.

Рис. 1. Общий вид плоской ЛИМ
При питании плоской ЛИМ переменным током в зазоре между сердечником и рабочим телом возникает бегущее магнитное поле, подобное вращающемуся полю асинхронной электрической машины. Это магнитное поле индуктирует в металле токи, что приводит к возникновению электромагнитных сил, под действием которых развивается усилие и металл приходит в движение [1].
К качеству работы ЛИМ предъявляются строгие требования как с точки зрения технологической и энергетической эффективности, так и с точки зрения надежности. Приоритеты и характер этих требований меняются в зависимости от способа использования машины. К примеру, ЛИМ для дозирования и транспортировки жидких металлов должны обеспечивать строгое линейное движение, так как перпендикулярное движение создает дополнительные гидравлические сопротивления, а это приводит к снижению эффективности работы ЛИМ в составе плавильно-литейного агрегата и дополнительным энергетическим затратам [1]. Совершенно иные требования предъявляются при использовании ЛИМ в качестве пе-ремешивателя металла или кристаллизатора. Главная задача при этом сводится к эффективному растворению легирующих добавок по всему объему ванны печи. В этом случае необходимо создавать движения как в вертикальной, так и в горизонтальной плоскости ванны с металлом, но при этом восходящие потоки не должны разрывать оксидную пленку на поверхности.
Итак, обобщая все требования, можно выделить критерий, который характеризует эффективную работу ЛИМ, – это усилие F (сила Лоренца), развиваемое в жидком металле. Усилие F – векторная величина, а это значит, что его можно разложить на три орта: Fx – составляющую, создающую линейное движение; Fy – составляющую, которая смещает ось движения металла (основываясь на трудах А. И. Вольдека, можно считать, что данная составляющая стремится к нулю); Fz – составляющую, создающую восходящие гидродинамические потоки металла. Таким образом, для определения остаются только два критерия. В данной статье рассматриваются вопросы максимизации составляющей Fx , так как она важна во всех случаях применения ЛИМ в металлургии.
Электромагнитное поле в расчетной области описывается системой уравнений Максвелла:
rotH=γ(E+[V×B]),(1)
rotE =-∂B ,
∂t divB =0,(3)
B=µ0µrH, где H – напряженность магнитного поля, А/м; E – напряженность электрического поля, В/м; V – скорость, м/с; t – время, с; µ0 – магнитная постоянная, Гн/м; µr – абсолютная магнитная проницаемость [2].
Решение системы уравнений электромагнитного поля осуществлялется относительно векторного магнитного потенциала:
∆ A - µ 0 µ r γ ∂ A + µ 0 µ r γ [ V rot A ] = 0, (5)
∂t где A – векторный магнитный потенциал, В ⋅ с/м; γ – удельная электрическая проводимость; V – вектор скорости движения элементарного объема жидкого металла.
В результате решения данного уравнения можно найти все характеристики электромагнитного поля, в том числе и искомую силу Лоренца:
F = ∫ N T ( J t × B ) d ( vol ), (6)
vol где N – вектор функции формы; Jt – вектор полной плотности тока; B – вектор магнитной индукции [3].
Целевую функцию задачи оптимизации обозначим W ( X ), где X = ( I 1, I 2, I 3, ϕ 1, ϕ 1, ϕ 3, f ). С целью классической постановки задачи оптимизации ее нужно привести к задаче минимизации целевой функции:
W ( X )= 1 →min. (7) 1+ F x 2( Х ) X
В формуле (7) величина Fx при фиксированных параметрах ЛИМ рассчитывается с помощью модели ЛИМ, разработанной в пакете математического моделирования ANSYS.
Рассмотрим, что представляет собой вектор параметров Х . Характер поведения усилий и их значения зависят от многих факторов: токов, сдвигов фаз, частоты питающего напряжения, типа конструкции ЛИМ, ширины активной части магнитопровода и т. д. Решающими параметрами при сохранении геометрии машины являются параметры питания (токи I 1, I 2, I 3, фазы токов в катушках ϕ 1, ϕ 2, ϕ 3, частота питающего напряжения f ), варьирование которых вызывает различные эффекты в жидком металле (например, увеличение составляющей Fx приводит к возникновению ламинарного движения в металле вместо турбулентного, уменьшению эффекта отталкивания и т. д.). Для исследуемой модели ЛИМ следует учитывать, что все параметры вектора Х изменяются дискретно, а принятые ограничения данных параметров обусловлены как конструкцией машины, так и возможностью серийно выпускаемых источников питания [3]:
– пределы изменения токов I 1, I 2, I 3 в проводниках катушек приняты от 15 до 25 с шагом дискретизации, равным 0,5, при этом проверяется гипотеза, что для достижения максимума Fx необходимо наличие асимметрии токов в катушках (верхний предел выбран исходя из максимальной термической стойкости изоляции обмоток ЛИМ);
– фазы токов рассматриваются только во второй ϕ 2 и третьей ϕ 3 катушках в диапазоне от 1 до 360 электрических градусов с шагом 1 градус, а фаза в первой катушке ϕ 1 приравнивается к 0;
– частота питающего напряжения f задается в диапазоне от 1 до 60 Гц (диапазон выбран исходя из возможностей источника питания и накопленного инженерного опыта) с шагом дискретизации, равным 1.
Решение задачи оптимизации. Постановка задачи оптимизации (7) характеризуется алгоритмически (инструментально, с помощью модели) рассчитываемой целевой функцией с дискретными переменными. Подобная постановка требует соответствующего выбора алгоритма оптимизации. Стохастические оптимизационные алгоритмы давно зарекомендовали себя как эффективное и удобное средство решения практических задач оптимизации [2].
В настоящее время большую популярность благодаря простоте реализации и эффективности приобрел класс методов под общим названием «эволюционные алгоритмы» [4]. Ярким примером таких алгоритмов оптимизации является генетический алгоритм (ГА), каждое решение которого представляется в виде бинарной строки, называемой хромосомой. Множество решений ГА называют популяцией. Поисковые операторы этого алгоритма имитируют процессы селекции, скрещивания, мутации, происходящие в живой природе.
Как показывает практика применения эволюционных алгоритмов, высокая размерность задач, нелинейность и многоэкстремальность целевой функции не создают для них дополнительных трудностей.
Пошаговая структура генетического алгоритма выглядит следующим образом:
-
1) инициализация популяции. Создается массив индивидов
Population = Initialization( X ), где Population = { x 1 , x 1 ,..., xN } , xi e X , i = 1, N ;
-
2) вычисление функции пригодности для индивидов. Создается массив:
Fitness = { f ( X i ),..., f ( Xn ) } , i = 1, N ;
-
3) запоминание лучшего индивида и значения его целевой функции:
Best = arg max f ( x );
x e Population
-
4) повтор выполнения операторов селекции, рекомбинации и мутации ( M – 1) раз и переход к шагу 1.
Размер популяции N , число поколений M и типы операторов являются параметрами (установками) генетического алгоритма, варьирование которых позволяет получить разные по эффективности реализации ГА. Существуют несколько реализаций для каждого из генетических операторов.
В бинарном ГА генотип (решение) представляет собой бинарный вектор, полученный из вещественного или целочисленного вектора фиксированной длины Length:
X = ( ^ i ,-, X Length ), X i e R или Z ■
Каждая координата может изменяться в некотором заданном интервале с выбранным шагом дискретизации, множество которых определяет область поиска в соответствующем пространстве поиска.
Одним из главных недостатков генетического алгоритма является сходимость к глобальному решению лишь по вероятности. Другими словами, процесс оптимизации этого алгоритма может остановиться в некоторой точке, которая не будет оптимумом. Для устранения данного недостатка используют подходящий алгоритм локального поиска для уточнения решения, найденного генетическим алгоритмом, параметры которого представлены в табл. 1.
Анализ табл. 1 показывает, что область поиска задана на дискретной решетке (гиперкубе), размерность которой равна порядка 1010 точек.
В данной работе в качестве алгоритма локального поиска использовался целочисленный алгоритм локальной оптимизации с переходом по первому улучшению.
Выбранные алгоритмы и подход к оптимизации были реализованы с использованием разработанной программной системы на языке высокого уровня C++ Builder 6.0 (окно настроек области поиска и генетического алгоритма и подключения внешней целевой функции этой системы представлено на рис. 2).
Оптимизация проводилась генетическим алгоритмом со следующими настройками: турнирная селекция (размер турнира равен 3), равномерное скрещивание, средняя мутация. Настройки генетического алгоритма выбраны как наиболее универсальные для неизвестной оптимизируемой функции. Число вычислений целевой функции в ГА равно 4 900 (70 индивидов на 70 поколений). Расчет одного значения целевой функции занимает порядка 5 мин. Таким образом, на расчет отводилось почти 17 сут непрерывной работы программы. Оптимизация была прервана на 30 поколении из-за того, что улучшения в оптимизации не наступало (стагнация). Найденное на тот момент решение было хуже уже известного решения. Полученное генетическим алгоритмом решение было уточнено локальным поиском (табл. 2). Параллельно с работой генетического алгоритма была запушена программа оптимизации локальным поиском с целью улучшения известного решения. В результате улучшенное локальным поиском решение без использования генетического алгоритма и решение с использованием ГА совпали.
Результаты оптимизации позволили сделать следующие выводы:
-
– генетический алгоритм не нашел решения лучше известного в связи с тем, что известное решение было достаточно близким к улучшенному решению, т. е. четыре из шести варьируемых параметров были определены точно лучшими и в улучшении уже не нуждались;
-
– локальный поиск, стартовавший из известного решения и решения, найденного генетическим алгоритмом, завершился в одной и той же точке области поиска, тем самым было найден локальный минимум, который, возможно, является глобальным минимумом;
-
– результат оптимизации позволил сформулировать гипотезу о том, что оптимизируемая целевая функция является монотонной и унимодальной.
С целью проверки гипотезы о наличии свойств монотонности и унимодальности целевой функции локальный поиск был осуществлен из нескольких крайних (гранич-
Таблица 1
Параметры структуры области поиска
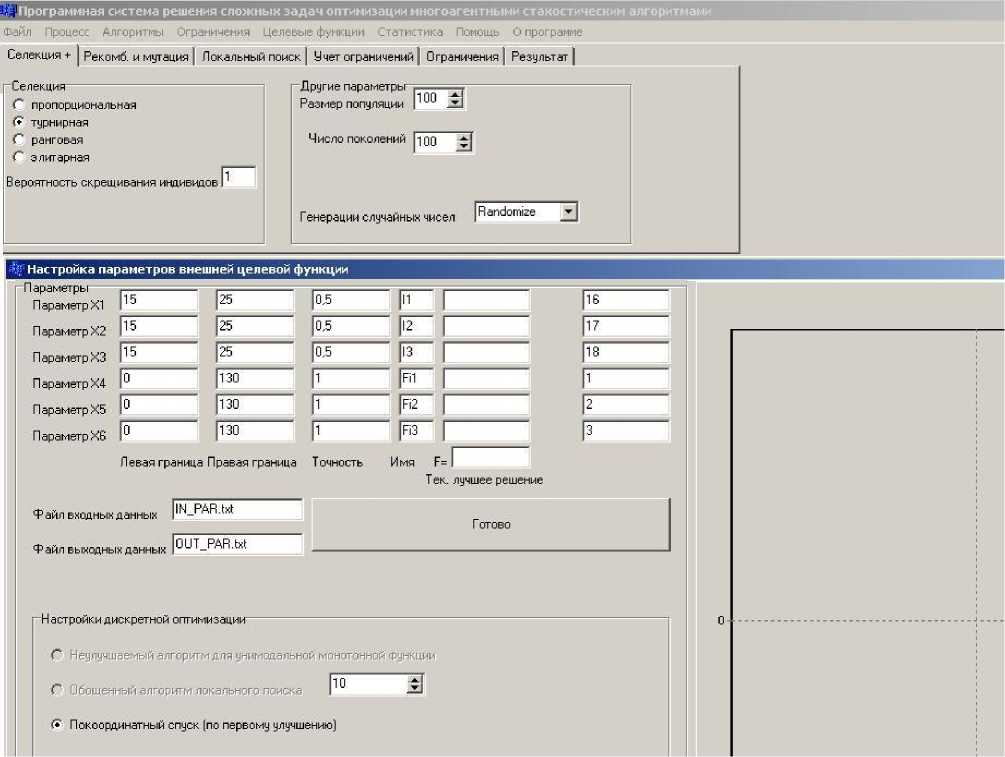
Рис. 2. Основные рабочие окна программной системы
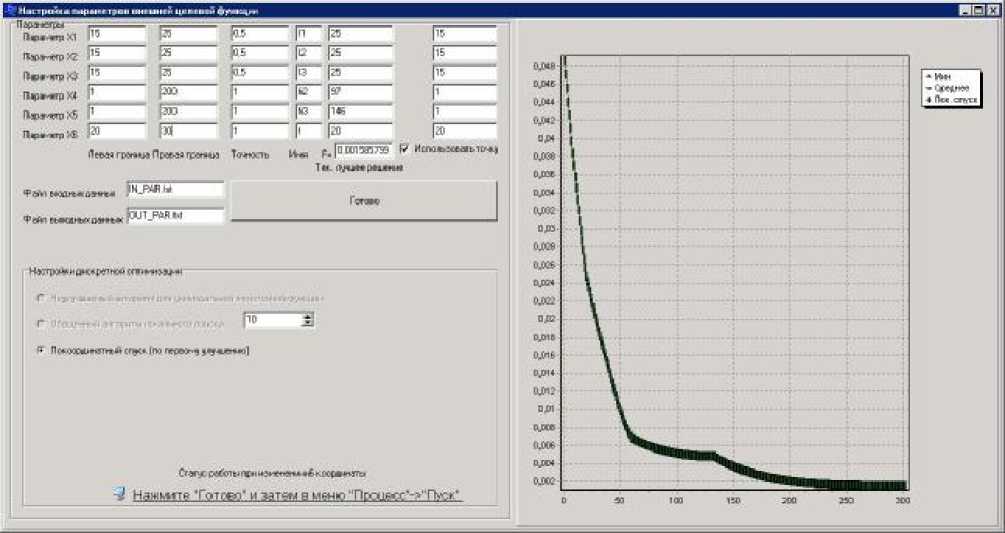
Рис. 3. График сходимости локального поиска из крайней точки в точку локального (глобального) минимума
