О создании системы имитации пониженной гравитации механическими агрегатами

Автор: Полещук Александр Фдорович, Кондратьева Анастасия Валерьевна
Журнал: Космическая техника и технологии @ktt-energia
Рубрика: Проектирование, конструкция, производство, испытания и эксплуатация летательных аппаратов
Статья в выпуске: 2 (49), 2025 года.
Бесплатный доступ
Статье рассматриваются функции экспериментально-испытательной базы внекорабельной деятельности (ВКД) РКК «Энергия» и её роль в становлении и развитии средств и технологий ВКД, проблемы моделирования искусственной микрогравитации для ВКД на орбите и гравитации для напланетной деятельности на стенде механического обезвешивания, предлагаются пути их решения. Наземная экспериментальная отработка, испытания, моделирование условий ВКД - факторы, определяющие успех операций ВКД. Для отработки ВКД применяется метод полунатурного физического моделирования, при котором система «человек-скафандр», конструкция отсеков и технические средства ВКД представлены в натуре, а микрогравитация моделируется с помощью механического стенда. РКК «Энергия» располагает макетами модулей станции и стендом обезвешивания «Координата». Стенд обезвешивания «Координата» в РКК «Энергия» является полигоном для активных опережающих поисковых работ, формирования технико-эргономических требований, предпроектного макетирования, оценки сопрягаемости оборудования со скафандром, испытаний оборудования, несовместимого с методами моделирования микрогравитации в полёте самолёта и в гидросреде.
Внекорабельная деятельность, скафандр, гравитация, микрогравитация, экспериментальная отработка, космонавт
Короткий адрес: https://sciup.org/143184749
IDR: 143184749 | УДК: 629.78.078
On developing a system for simulating reduced gravity using mechanical rigs
The paper discusses the functionality of the experimental testing facility for extravehicular activities (EVA) at RSC Energia and it's role in the development and evolution of EVA equipment and technologies, of the problem of simulating artificial microgravity for in-orbit EVA and gravity for activities on surfaces of planets in the mechanical gravity compensation rig, and proposes approaches to their solution. Ground-based experimental development, tests, simulation of EVA environment are the factors that determine the success of EVA operations. To develop an EVA, the method of “semi-natural” physical simulation is used, where the man-spacesuit system, the compartments structure and EVA equipment are represented by actual hardware, while microgravity is simulated using a mechanical test rig. RSC Energia has mockups of space station modules and the test rig Koordinata for gravity compensation. The Koordinata gravity compensation test rig at RSC Energia is a proving ground for conducting advanced exploratory work, formulating human engineering requirements, prototyping, evaluating hardware compatibility with the spacesuit, testing the equipment that cannot be tested using simulations in reduced-gravity aircraft or neutral-buoyancy facilities.
Текст научной статьи О создании системы имитации пониженной гравитации механическими агрегатами
Наземная экспериментальная отработка, испытания, моделирование условий внекорабельной деятельности (ВКД) — факторы, определяющие успех операций ВКД. Для отработки применяется метод полунатурного физического моделирования, при котором система «человек–скафандр», конструкция отсеков и технические средства ВКД представлены в натуре, а микрогравитация моделируется при полёте самолета по параболе, в условиях гидросреды или на стенде механического моделирования микрогравитации [1].
Всего космонавтами Советского союза и России за 60 лет было выполнено 174 выхода в открытый космос. При этом для 35 выходов испытания проводили в условиях моделированной микрогравитации на динамическом стенде «Селен» в РКК «Энергия» (рис. 1):
-
• для 13 выходов проводились испытания оборудования, несовместимого с гидросредой;
-
• для 22 срочных выходов проводилась отработка парирования нештатных ситуаций, когда был дефицит времени на создание и отработку оборудования.

а)

б)
в)
Рис. 1. Испытания на динамическом стенде «Селен»: а — подготовка к ВКД-21а; б — подготовка к ВКД-17а; в — сборка фермы «Софора» при подготовке к внекорабельной деятельности в 1991 г. (фотографии из архива РКК «Энергия»)
Кроме того, на стенде «Селен» проводились следующие работы:
-
• моделирование сборки и развёртывания научной аппаратуры;
-
• поисковые задачи и моделирование напланетной деятельности.
Динамический стенд «Селен», являющийся электромеханической системой обезвешивания скафандров космонавтов, был создан РКК «Энергия» в 1960-е гг. для отработки лунной программы
СССР и модернизирован ООО «Центр тренажёростроения и подготовки персонала» (ЦТПП, г. Новочеркасск) в 2013 г. На настоящий момент он выведен из эксплуатации [2].
В настоящее время для отработки операций ВКД космонавтов в ФГБУ «Научно-исследовательский испытательный центр подготовки космонавтов имени Ю.А. Гагарина» (далее — ЦПК им. Ю.А. Гагарина) для создания микрогравитации в земных условиях используются гидролаборатория, тренажёр «Выход-2» и летающая лаборатория, где микрогравитация моделируется при полёте самолёта по параболе [3].
В соответствии со стратегией российской пилотируемой космонавтики на период до 2035 г. [4], реализацию национальной лунной программы в ближайшее десятилетие целесообразно проводить последовательными этапами, одним из которых является «Луна – экспедиция». Данный этап позволит расширить и нарастить плацдарм российского присутствия на Луне.
Для обеспечения разработки, создания, испытаний, наземной эксплуатации космических средств для перечисленных задач опережающими темпами должны быть созданы экс- периментальные установки и стенды для наземной отработки [5].
В этой связи РКК «Энергия» совместно с ЦТПП создан комплекс «Координата», где с помощью механи- ческих агрегатов имитируется гравитация от 0 до 1g [6].
Изделие «Координата»
Изделие «Координата» представляет собой крупногабаритную электромеханическую систему, состоящую из опорной конструкции в форме параллелепипеда с размещёнными на уровнях 7 и 8,5 м рельсовыми путями, по которым перемещаются два подвижных моста системы обезвешивания скафандров (рис. 2, 3).
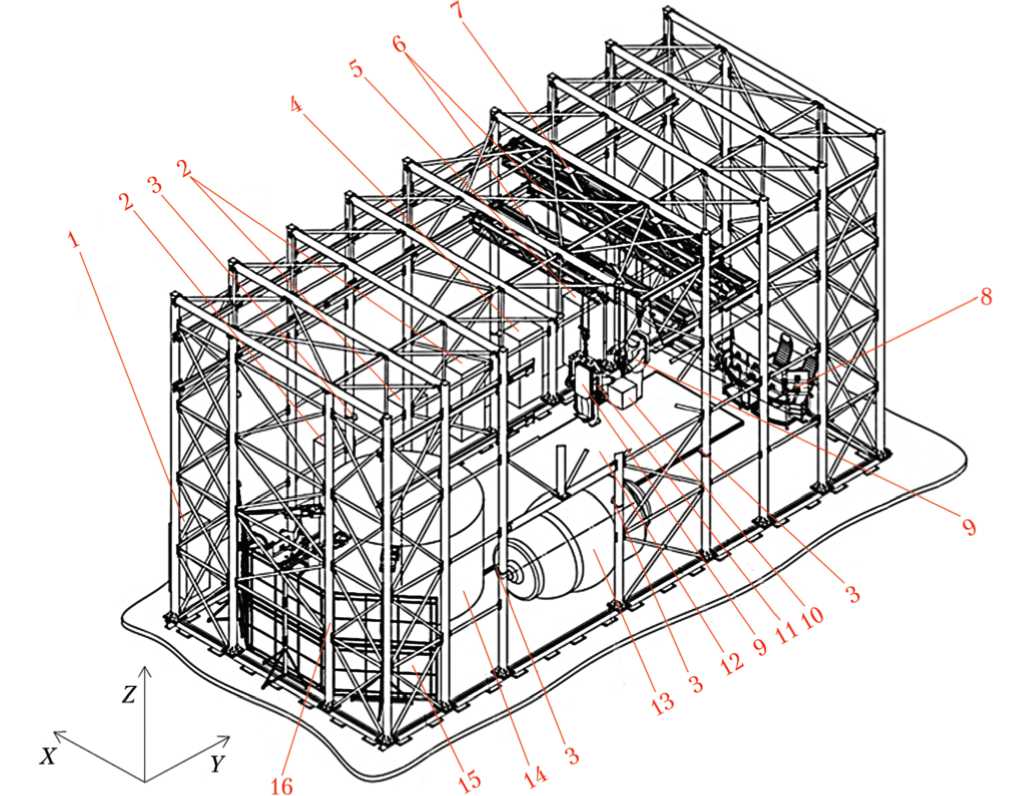
Рис. 2. Эскиз изделия «Координата»: 1 — стойка системы имитации визуальной обстановки; 2 — стойка системы управления электроприводами; 3 — IP-камера видеонаблюдения; 4 — стойка активного карданова подвеса скафандра; 5 — стойка системы электропитания; 6 — подвижные мосты системы обезвешивания скафандров 1 и 2; 7 — подвижный мост системы обезвешивания полезного груза; 8 — пульт контроля и управления; 9 — скафандр; 10 — полезный груз; 11 — система активного карданова подвеса; 12 — макет внеземной поверхности; 13 — макет внешней рабочей поверхности модуля российского сегмента (РС) МКС; 14 — макет типовой локальной зоны РС; 15 — система имитации визуальной обстановки; 16 — опорная конструкция (рисунок создан и предоставлен ЦТПП)
а)
б)

в)
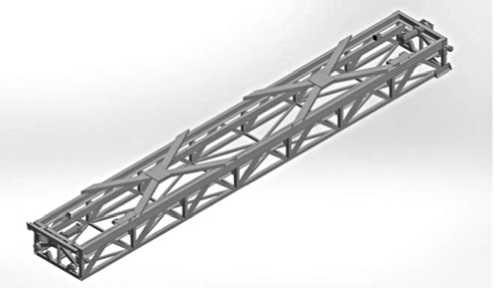
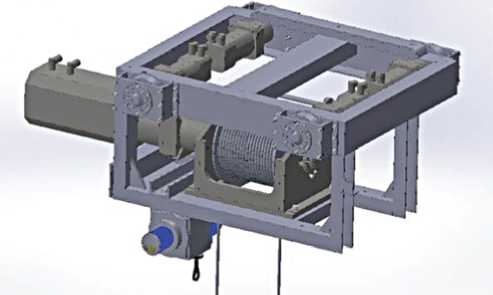
Рис. 3. 3D-модели составных частей изделия «Координата»: а — мост продольного перемещения; б — тележка поперечного перемещения с лебёдкой; в — подвес для отработки вертикального перемещения (рисунки созданы и предоставлены ЦТПП)
Движение каждого моста по рельсам обеспечивают два электропривода, расположенные по краям моста, для отрабатывания Y -составляющей горизонтальных перемещений объекта обез-вешивания. Движение каждой тележки по мосту обеспечивают три электропривода для отрабатывания X -составляющей горизонтальных перемещений объекта обезвешивания. Движение лебёдки вертикального перемещения для отрабатывания Z -составляющей обеспечивает один электропривод.
Изделие «Координата» обеспечивает проведение экспериментальной отработки в автоматическом режиме моделирования микрогравитации одновременно для двух операторов в обезвешенных скафандрах, а также отработку перспективных операций напланетной деятельности в режимах моделирования пониженной гравитации Луны, Марса или астероидов [7].
Задачи, которые обеспечивает изделие «Координата»:
-
• проведение экспериментальных исследований в отношении разрабатываемых и перспективных средств ВКД;
-
• выполнение эргономических исследований в части использования оборудования и скафандров для ВКД;
-
• оценка функционирования инструментов и оборудования для ВКД;
-
• отработка навыков выполнения операций ВКД одновременно двумя операторами на внешних поверхностях орбитальной станции (ОС) (рис. 4);

Рис. 4. Отработка навыков выполнения операций вне-корабельной деятельности одновременно двумя операторами (фотография из архива РКК «Энергия»)
-
• отработка методик перемещения, монтажа и демонтажа типовых укладок по внешней поверхности ОС;
-
• отработка навыков строительномонтажных работ и выполнения операций с использованием специального инструмента в режиме моделирования лунной или марсианской гравитации (рис. 5, 6);
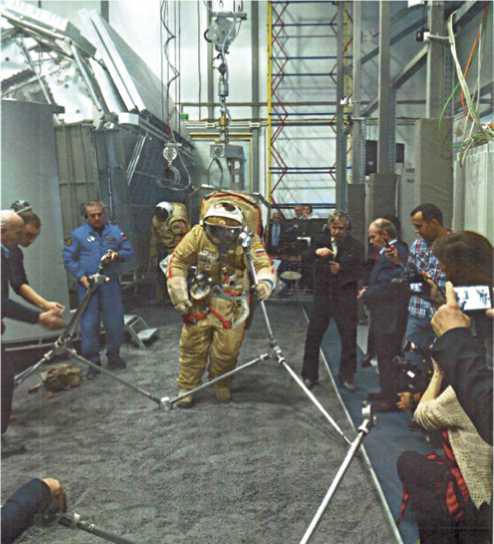
Рис. 5. Отработка навыков строительно-монтажных работ в режиме моделирования лунной гравитации [8]
-
• отработка навыков перемещения оператора в режиме моделирования лунной или марсианской гравитации;
-
• подготовка профильных специалистов по обеспечению ВКД.
Отработка действий космонавтов на поверхности Луны
В режиме моделирования лунной гравитации могут быть определены возможности перемещения, выполнения рабочих движений, работы с геологическими инструментами и другим оборудованием.
Наличие макета внеземной поверхности позволит приступить к отработке перспективных операций напланетной деятельности в части:
-
• строительно-монтажных работ по созданию на Луне жилых и научнопроизводственных модулей будущей лунной базы (рис. 5);
-
• перемещения операторов и совместного выполнения работ с использованием полезных грузов и разнообразных инструментов в условиях моделированной гравитации Луны;
-
• отработки навыков взятия проб грунта, поиска полезных лунных ископаемых и других научно-геологических исследований (рис. 6);

а) б) в)
Рис. 6. Отработка действий космонавтов на поверхности Луны: а — отработка навыков взятия проб грунта; б — отработка навыков выполнения работ с использованием полезных грузов; в — отработка навыков перемещения оператора (фотографии из архива РКК «Энергия»)
В декабре 2016 г. при участии лётчика-космонавта А.Ю. Калери, лётчика-космонавта А.Ф. Полещука, космонавта-испытателя М.В. Серова и специалистов отдела ВКД РКК «Энергия» совместно со специалистами ЦТПП на комплексе «Координата» в Донском филиале Центра тренажёростроения (г. Новочеркасск) были проведены эксперименты по оценке возможности отработки на комплексе «Координата» операций ВКД космонавтов и перспективных операций напланетной деятельности.
Проведённые эксперименты подтвердили на практике соответствие комплекса «Координата» требованиям технического задания на составную часть опытно-конструкторской работы «Координата» в части проведения практических занятий одновременно с двумя космонавтами по подготовке и отработке ВКД при моделировании их перемещений по внешней поверхности МКС и работе с полезными грузами [9], а также в части проведения практических занятий с космонавтами по отработке перспективных перемещений космонавтов по поверхности планет с заданным коэффициентом моделируемой пониженной гравитации [8].
Моделирование пониженной гравитации механическими агрегатами
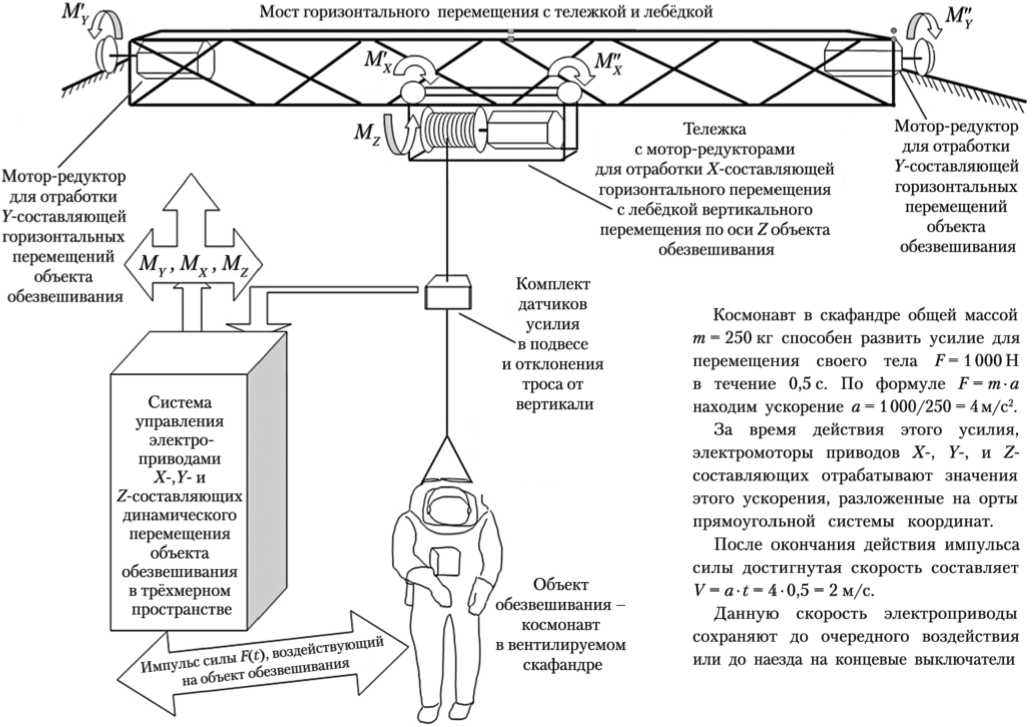
Моделирование пониженной гравитации с помощью электромеханической системы обезвешивания происходит за счёт поддержания усилия в подвесе, равного разности веса человека в скафандре и требуемого моделируемого усилия на опору в зависимости от варианта имитации гравитации: при лунной, марсианской гравитации или микрогравитации (рис. 7).
Моделирование динамики поведения объектов обезвешивания электромеханическими агрегатами возможно в двух режимах: в режиме автоматического обезвешивания и ручном режиме управления с пульта управления или со стоек управления электроприводами.
В автоматическом режиме задействованы датчики двух типов: первый контролирует вес объекта, а второй — отклонение троса от вертикали (рис. 8).
На Земле как на Луне
На Земле как на орбите, в невесомости

На Луне ^л=1’6м/с2
На Марсе gM = 3,7 м/с2
Поддержание усилия в подвесе
Р--2050Н
На Земле как на Марсе

Поддержание усилия в подвесе
Р =-1525 Н
Усилие в подвесе Р=-2450Н
Масса снаряжённого в скафандр человека т = 250 кг
Масса снаряжённого в скафандр человека т = 250 кг
Масса снаряжённого в скафандр человека т = 250 кг
Масса снаряжённого в скафандр человека т = 250 кг
Масса снаряжённого в скафандр человека т = 250 кг

на Луне = 400Н

на Марсе = 925Н

на Земле = 2450Н

на Земле
= 245011

на Земле
= 2450Н
Рис. 7. Схема моделирования лунной, марсианской гравитации или микрогравитации на орбите (рисунок создан авторами)
/ '—--57г^ейству1ощии Импул“Х^!^ /
Мост горизонтального перемещения с тележкой и лебёдкой
Мотор-редуктор /\ для отработки / \
У-составляющей | | горизонтальных Л | | |\ перемещений /М М М объекта \ у обезвешивания ч | Г и
Мотор-редуктор для отработки
У-составляющей горизонтальных перемещений объекта обезвешивания
Космонавт в скафандре общей массой т - 250 кг способен развить усилие для перемещения своего тела f - 1 000 Н в течение 0,5с. По формуле F = та находим ускорение а = 1000/250 = 4 м/с2.
За время действия этого усилия, электромоторы приводов Х-, У-, и Z- составляющих отрабатывают значения этого ускорения, разложенные на орты прямоугольной системы координат.
После окончания действия импульса силы достигнутая скорость составляет V-a t-4 0,5-2 м/с.
Данную скорость электроприводы сохраняют до очередного воздействия или до наезда на концевые выключатели
Комплект троса от вертикали датчиков усилия в подвесе и отклонения
Система управления электроприводами
Х-,У- и /составляющих динамического перемещения объекта обезвешивания в трёхмерном пространстве
Тележка с мотор-редукторами для отработки Х-составляющей горизонтального перемещения • с лебёдкой вертикального перемещения по оси Z объекта обезвешивания
/ Объект обезвешивания -космонавт в вентилируемом скафандре
Рис. 8. Схема моделирования динамики поведения объектов обезвешивания электромеханическими агрегатами: M ′ X, M ″ X — крутящие моменты первого и второго мотор-редукторов для отрабатывания перемещений по оси X; M ′ Y, M ″ Y — крутящие моменты первого и второго мотор-редукторов для отрабатывания перемещений по оси Y; MZ — крутящий момент для отрабатывания перемещений по оси Z (рисунок создан авторами)
Изменение значений датчика усилия в подвесе, совместно с датчиком отклонения троса и акселерационным датчиком, позволяет определить величину и направление применённой силы воздействия на обезвешенный скафандр с оператором. Это позволяет программному обеспечению рассчитать необходимый импульс воздействия и выдать соответствующие команды на электроприводы подвижного моста, тележки и лебёдки для учёта движения обезвешенного скафандра в заданном режиме моделирования микрогравитации или пониженной гравитации. Программное обеспечение при выполнении расчётов учитывает суммарную массу конструкций и навесного оборудования подвижного моста, тележки, механизма вертикального перемещения с подвесом, оператора в обезвешенном скафандре, что позволяет компенсировать силу тяжести в вертикальном направлении и силы трения, возникающие в колёсных парах при движении подвижных мостов и тележек в горизонтальном направлении.
Также в системе задействованы концевые выключатели, ограничивающие движение моста по рельсам и тележки по мосту в крайних положениях.
Система обезвешивания скафандров обеспечивает работу подвижных мостов в автоматическом режиме «мягкого» взаимодействия, принцип действия которого заключается в том, что при сближении мостов происходит перераспределение их импульсов, и оба моста начинают двигаться как единый мост в направлении движения подвижного моста с большей разницей импульсов. При этом не происходит остановка моделирования, а выполняется взаимный учёт влияния перемещения мостов. Подвижные тележки и механизм вертикального перемещения продолжают функционировать в режиме автоматического моделирования микрогравитации или пониженной гравитации с учётом импульсов движения, полученных от подвижных мостов. Размещение подвижных мостов на разных уровнях обеспечивает минимальное расстояние между точками подвеса обезвешенных скафандров, что позволяет операторам в обезвешенных скафандрах выполнять совместные работы в режиме моделирования микрогравитации или пониженной гравитации.
Перемещение мостов, тележек и работа лебёдок обеспечивается электроприводами. Сигналы, поступающие от акселерационных датчиков и датчиков отклонения троса, через оборудование комплекса устройств сопряжения с объектом поступают в вычислительную систему комплекса «Координата» и систему управления электроприводами.
На основе полученной информации выполняется моделирование, и электроприводам даётся указание выполнить соответствующее смещение мостов, тележек и функционирование лебёдок с целью обеспечить для скафандров режимы микрогравитации или пониженной гравитации Луны, Марса, астероидов (рис. 9).
Составные части изделия «Координата»
Помимо вышеописанного изделие «Координата» включает в себя следующие подсистемы:
-
• систему активного карданова подвеса скафандра (АКПС), которая обеспечивает активно управляемое электроприводами вращение по тангажу и пассивное — по курсу в автоматическом режиме моделирования микрогравитации и пониженной гравитации (рис. 10);
-
• пульт контроля и управления, который включает в себя автоматизированные рабочие места инструктора, инженера и врача (рис. 11);
-
• систему имитации визуальной обстановки, которая совместно со специализированными макетами локальных зон ОС создаёт эффект дополненной реальности, обеспечивающий для операторов при работе на стенде визуальные картины, имитирующие на экранной плоскости, попадающей в зрительную зону операторов, внешний вид объектов (орбитальных модулей), которые могли бы находиться перед его взором в реальной обстановке (рис. 12) [10];
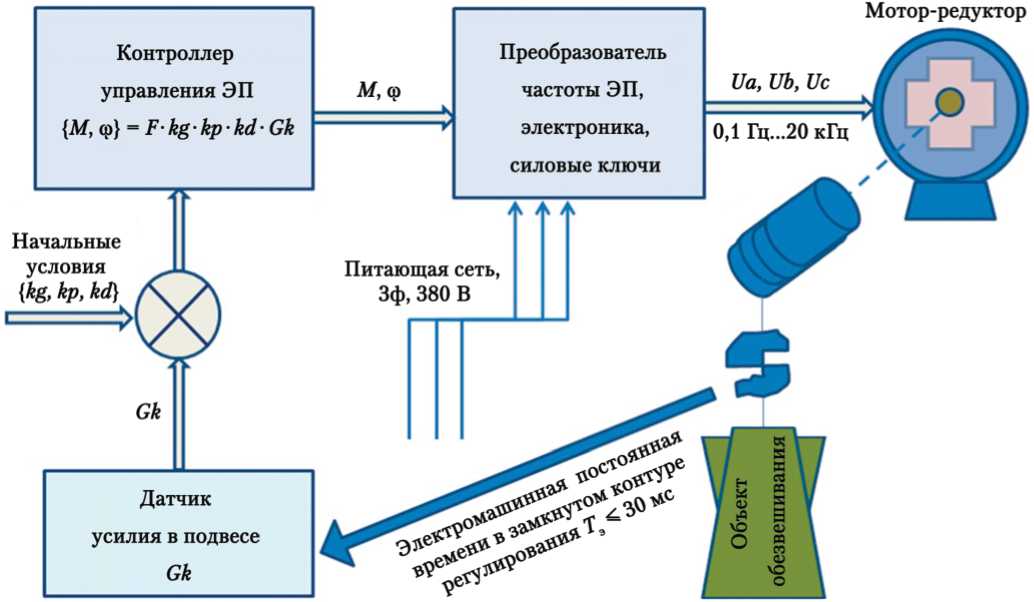
Рис. 9. Схема контура управления электроприводами (ЭП) системы обезвешивания стенда: {М, ῳ } – параметры управления приводом, функции момента и угловой скорости; F – прикладываемое импульсно усилие внешнего воздействия; Gk – коэффициент усилия в подвесе, моделирующий гравитацию; {kg, kp, kd} – параметры пропорционально-интегрально-дифференцирующего регулятора; Ua, Ub, Uc – напряжение, подающееся на электропривод (рисунок создан авторами)

Рис. 10. Система активного карданова подвеса скафандра (фотография предоставлена ЦТПП)

Рис. 13. Система видеонаблюдения (фотография предоставлена ЦТПП)
-
• систему видеонаблюдения, которая позволяет проводить видеозапись и контролировать процесс испытаний (рис. 13).
