О технических характеристиках шарикового винтового дифференциала для мелкогабаритных транспортных средств

Автор: Абрамова А.Р.
Журнал: Juvenis scientia @jscientia
Рубрика: Технические науки
Статья в выпуске: 4, 2018 года.
Бесплатный доступ
Представлены обоснование и постановка задачи создания компактного шарикового винтового дифференциала для малогабаритной сельскохозяйственной, коммунальной, инвалидной техники и велосипедов с целью развязки колесных пар и улучшения проходимости на дорогах с мягким покрытием. Прототип - дифференциал автоматический Красикова (ДАК) - эксплуатируется в автомобилестроении на автомобилях УАЗ. Цель исследования - установить возможность применения миниатюрного дифференциала ДАК на велосипеде. Результаты: из анализа режимов работы транспортного средства получены технические характеристики нового дифференциала, сформулировано техническое задание для проектирования деталей и сборочных единиц дифференциала. Вывод: по расчетным данным создание образца дифференциала возможно
Шариковая винтовая передача. момент силы, дифференциал, техническое задание на проектирование
Короткий адрес: https://sciup.org/14110498
IDR: 14110498 | УДК: 629.11.01
About technical characteristics of ball screw differential for small vehicles
The base and the problem of creating a compact ball screw differential for the small agricultural, municipal, a machinery and bicycles with the aim of decoupling of wheelsets presented for improving the ability to drive on the roads with a soft cover. Prototype was a differential automatic of Krasikov (DAK) that used in the automotive industry on automobiles UAZ. The purpose of the study is to establish the possibility of the use of miniature differential DAK for a bike. Results: technical parameters for a new differential are obtained, the technical foundation for the design of parts and assembly units was formulated. Conclusion: creation of differential is possible
Текст научной статьи О технических характеристиках шарикового винтового дифференциала для мелкогабаритных транспортных средств
В настоящее время существует необходимость производства малогабаритной сельскохозяйственной, коммунальной и инвалидной техники на основе схемы с полной кинематической развязкой одной или двух колесных пар. Полная развязка колесной пары позволяет улучшить маневренность на поворотах и ухабах и проходимость транспортного средства. Техника

Рисунок 1. Примерный вид дифференциала автоматического Красикова в разрезе используется в фермерских хозяйствах, при уборке улиц населенных пунктов и для передвижения инвалидов с нарушениями опорно – двигательного аппарата.
Наиболее привлекательным устройством для развязки движения колесной пары является шариковый винтовой дифференциал, прототипом которого может служить дифференциал автоматический Красикова (ДАК), из-за его ожидаемой
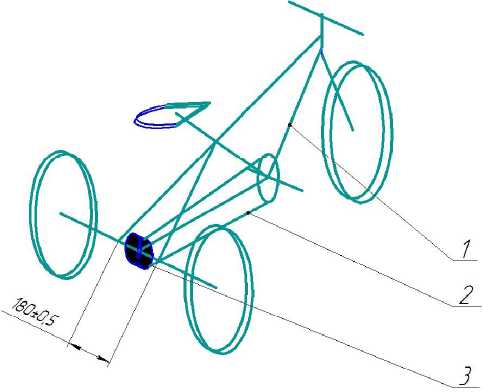
Рисунок 2. Схема трайка с дифференциалом
1 – трайк,
2 – цепная передача
3 – дифференциал компактности и малого веса. Примерный вид дифференциала представлен на рисунке 1.
На рисунке 2 представлена схема трайка с установкой дифференциала.
Цель данной работы – выработка первичных технических требований к дифференциалу для малых транспортных средств и разработка схемы научно – исследовательских и опытно – конструкторских работ (НИОКР) для получения комплекта конструкторской документации на дифференциал.
Для создания опытного образца шарикового винтового дифференциала необходимо выполнить ряд работ, представленных на схеме 1.
Схема 1
Этапы научно-исследовательской и опытно-конструкторской работы по созданию дифференциала шарикового винтового
|
1 |
Осознание общественной потребности в разрабатываемом изделии |
|
2 |
Техническое задание на проектирование (первичное описание) |
|
3 |
Анализ существующих технических решений |
|
4 |
Разработка функциональной схемы |
|
5 |
Разработка структурной схемы |
|
6 |
Метрический синтез механизма (синтез кинематической схемы) |
|
7 |
Статический силовой расчет |
|
8 |
Эскизный проект |
|
9 |
Кинетостатический силовой расчет |
|
10 |
Силовой расчет с учетом трения |
|
11 |
Расчет и конструирование деталей и кинематических пар (прочностные расчеты, уравновешивание, балансировка, виброзащита) |
|
12. |
Технический проект |
|
13 |
Рабочий проект (разработка рабочих чертежей деталей, технологии изготовления и сборки) |
|
14 |
Изготовление опытных образцов |
Содержание пунктов схемы 1:
-
1. Общественная потребность в разработке дифференциала заключается в необходимости проектирования мелкогабаритной техники для подачи кормов, уборки навоза, перевозки мелких грузов и человека в сельском хозяйстве в условиях полного бездорожья; в необходимости разработки полноприводной мелкогабаритной снего- и грязеуборочной, подметальной машины для маневрирования в условиях узких тротуаров в населенных пунктах; для транспортирования инвалидов по грунтовым дорогам с мягким покрытием и в условиях частичного бездорожья; для создания трех – и четырех колесных велосипедов для инвалидов – спортсменов и лиц с ограниченными возможностями.
-
2. За основу, как прототип технического решения для крупной внедорожной техники, принимается дифференциал Красикова (ДАК). Первичное функциональное и структурное описание конструкции дифференциала указано в [2], шариковая винтовая передача описана в [4].
-
3. Существующее изделие изготовляется и применяется для автомобилей УАЗ. Накоплена статистика надежности ДАК.
-
7. Статический силовой расчет.
Пункты 4-6 схемы 1 можно не выполнять, так как конструктивное решение сохраняется. Изменения касаются размеров изделия (миниатюризации) и конструкции крышек для возврата шариков к винтам дифференциала.
Основное содержание первого этапа НИОКР – формулировка технических требований к дифференциалу шариковому винтовому для мелкогабаритных транспортных средств.
При создании дифференциала необходимо учитывать, что масса движущегося транспортного средства может меняться от 100 до 500 кг в зависимости от вида привода. Привод может осуществляться мускульной силой человека или простейшим маломощным двухтактным бензиновым двигателем.
Рассмотрим случай привода от мускульной силы человека. В данном случае дифференциал можно поставить на 3 или 4 колесный велосипед или веломобиль, который может приводиться в движение ногами или руками человека.
Рассмотрим пример движения инвалида с нарушениями опорно-двигательного аппарата на олимпийском трехколесном велосипеде – трайке, масса инвалида – до 100 кг, масса спортивного снаряда – титанового трайка до 15 кг, максимальная скорость движения спортсмена – до 12 км/ч по дорогам с твердым покрытием. При этом длина колесной базы трайка (расстояние между колесами передним и задним) – до 1.8 м, расстояние между задними колесами – 1 м, диаметры колес – (24-29) дюйма.
В общем случае движения силой, движущей трайк, является касательная реакция дороги на ведущее колесо трайка PT . Схема распределения сил на ведущем колесе велосипеда представлена на рисунке 3.
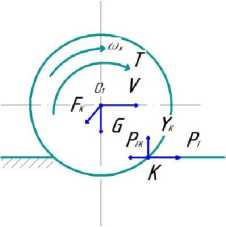
Рисунок 3. Схема нагрузки ведущего переднего колеса трайка
ω к – Угловая скорость колеса; T=M K – ведущий момент колеса; P FK – сила сопротивления качению; Y K – нормальная реакция почвы;
F K – реакция рамы трайка;
G – вес части трайка;
-
V – скорость трайка
При движении по горизонтальной поверхности развиваемая на ведущих колесах трайка окружная сила (называемая также силой тяги) может быть определена по формуле [1]
_ М к и тТ]т f 1 151 u^ T , I K 2 ^
PT _ I + " KK 2 I rK I rK rK )
Где:
MK – крутящий момент создаваемый спортсменом-36 Н*м;
ηT – механический коэффициент полезного действия (КПД) трансмиссии, в среднем 0,8;
rK – радиус качения колеса – 0.3 м;
-
I1 – момент инерции маховика (педальной группы), 1кг*м2;
-
IK2 – суммарный момент инерции ведущих колес (если спереди 2 колеса) – 0.12 кг*м2;
-
ε1 – угловое ускорение маховика – 2 рад*сек2;
-
εK2 – угловое ускорение ведущего колеса – 2 рад*сек2.
Движущая сила равна PT=(361-480)Н .
Примем силу равной 400 Н.
С учетом передачи движения на ведомую пару колес посредством цепной передачи с регулируемым натягом и максимальным передаточным числом u=4 получим крутящий момент, передаваемый на заднюю пару колес, равным T 2 = M K uη цеп η подш = 136,39 Н*м. [2]
Где:
ηцеп – коэффициент полезного действия цепной передачи, η цеп = 0,97 ;
ηподш – коэффициент полезного действия двух пар подшипников задних колес, ηподш = 0,99 [2].
При этом угловая скорость ведомых колес не должна превышать 11,11 рад/с при средней скорости колес 12 км/ч.
Таким образом, динамические характеристики будущего дифференциала – крутящий момент на валу Т2 = 136,39 Н*м и угловая скорость вала 11,11 м/с. Габаритные размеры дифференциала устанавливаются по размерам заднего моста трайка и должны быть: диаметр – не более 65 мм, длина – около 65 мм.
Особые требования к конструкции – винты дифференциала должны быть собраны с задними полуосями, на которых устанавливаются колеса, при помощи разъемного шлицевого соединения.
Полученные технические характеристики были использованы при определении размеров основных рабочих тел дифференциала – шариков и винтов, в статье [1]. Оказалось, что существующие типоразмеры шариков подшипников качения и их материал пригодны для проектирования дифференциала [4].
Результаты.
-
1. Полученные по расчетам в статье [1] предварительные размеры рабочих тел можно принять за основу для выпуска конструкторской документации.
-
2. Определена техническая характеристика шарикового винтового дифференциала для мелкогабаритной техники с приводом от мускульной силы человека.
Выводы.
-
1. Конструктивная схема дифференциала шарикового винтового Красикова является приемлемой для создания дифференциала для мелкогабаритной техники с приводом от мускульной силы человека.
-
2. Возможно создать аналог дифференциала для техники с приводом от маломощного двигателя, с небольшим изменением размеров.
Список литературы О технических характеристиках шарикового винтового дифференциала для мелкогабаритных транспортных средств
- Аптуков В.И., Абрамова А.Р. Основы расчета шарико-винтовой передачи велосипеда//Молодежная наука 2014-технологии, инновации: Материалы Всероссийской научно-практической конференции молодых ученых, аспирантов и студентов г. Пермь 11-14 марта 2014 г. Пермь. 2014. ч.4. С. 55-58.
- Леликов О.П. Основы расчета и проектирования деталей и узлов машин//Конспект лекций по курсу деталей машин: монография. М.: Машиностроение, 2007. 500 с.
- Вольмир А.С., Григорьев Ю.П., Стакевич А.И. Сопротивление материалов: монография. М.: Дрофа, 2007. 591 с.
- ОСТ 2 Р31-5-89. Станки металлорежущие. Шариковые винтовые передачи. Технические условия. М.: ЭНИМС, 1989. 46 с.
- ГОСТ 25329 -82. Станки металлорежущие. Передачи винт-гайка качения. Основные размеры. М.: Издательство стандартов, 1982. 4с.
