О влиянии движения на сигнал с гиперболической частотной модуляцией

Автор: Шостак С.В., Бенгард А.В., Дорофеев Г.В., Стародубцев П.А.
Журнал: Журнал Сибирского федерального университета. Серия: Техника и технологии @technologies-sfu
Рубрика: Исследования. Проектирование. Опыт эксплуатации
Статья в выпуске: 7 т.16, 2023 года.
Бесплатный доступ
В данной статье рассмотрено влияние эффекта Доплера на сигнал с гиперболической частотной модуляцией. Проведен анализ эхо-сигнала на приемнике после отражения от цели, движущейся с постоянной скоростью под некоторым произвольным курсовым углом относительно гидроакустической станции.
Гиперболическая частотная модуляция, эффект доплера, ряд тейлора
Короткий адрес: https://sciup.org/146282723
IDR: 146282723 | УДК: 681.2.083
About the motion influence on a signal with hyperbolic frequency modulation
This article discusses the Doppler effect influence on a signal with hyperbolic frequency modulation. An echo signal analysis at the receiver after reflection from a target moving at a constant speed at some arbitrary heading angle relative to the hydroacoustic station was carried out.
Текст научной статьи О влиянии движения на сигнал с гиперболической частотной модуляцией
Цитирование: Шостак С. В. О влиянии движения на сигнал с гиперболической частотной модуляцией / С. В. Шостак, А. В. Бенгард, Г. В. Дорофеев, П. А. Стародубцев // Журн. Сиб. федер. ун-та. Техника и технологии, 2023, 16(7). С. 783–788. EDN: EFVNIS
Как известно, корреляционная обработка сигнала, или обработка с помощью согласованного фильтра, основана на сравнении отраженного эхо-сигнала с сигналами, которые могли бы быть приняты. Эта задача решается достаточно просто, когда цель неподвижна, так как в этом случае сигналы, не подлежащие сравнению, составляют множество задержаний копий переданного сигнала. В этом случае приемник производит поиск на этом множестве и определяет задержанные копии, лучше всего коррелирующие с принятым сигналом. При использовании пассивного фильтра этот поиск происходит автоматически. В случае движения цели корреляционный приём значительно усложняется, так как эхо-сигнал может заметно меняться по форме в зависимости от типа движения цели и вида излученного сигнала. По этой причине приёмник должен определять не только задержку принятого сигнала, но и другие его характеристики. Один из способов, позволяющий обойти эти трудности, заключается в использовании инвариантного по отношению к доплеровскому эффекту сигнала, который остается согласованным для фильтра при наличии даже весьма большого доплеровского искажения. Таким сигналом, известным в настоящее время, является сигнал с гиперболической частотной модуляцией, иначе – ГЧМ. Вопросам синтеза и анализа таких сигналов посвящено достаточно большое количество работ [2, 5]. Вместе с тем полученные результаты инвариантности ГЧМ сигналов к доплеровским искажениям основаны на предположении постоянства доплеровского параметра, т.е. относительная скорость сближения (расхождения) с целью должна иметь постоянную величину. В реальной же обстановке такие ситуации бывают довольно редко. Рассмотрим эффект Доплера для ГЧМ сигнала, когда цель имеет постоянную скорость, но движется под некоторым произвольным курсовым углом по отношению к носителю ГАС. В этом случае относительная скорость движения «носитель – цель» может быть аппроксимирована начальной скоростью цели и постоянным ускорением в направлении «ГАС – цель», что ведет к частотному сдвигу ГЧМ сигнала. Будем считать, что цель имеет постоянную скорость и движется в произвольном направлении относительно гидролокатора, как показано на рис. 1.
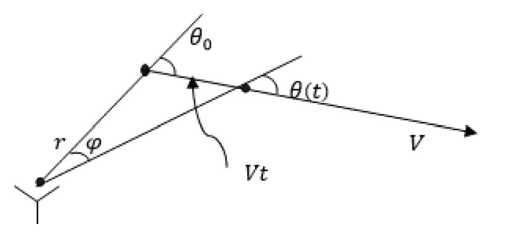
Рис. 1. Движение цели с постоянной скоростью относительно ГАС
Fig. 1. The movement of the target at a constant speed relative to the sonar station
В начальный момент времени угол между вектором скорости цели и направлением на гидролокатор имеет значение θ 0 . В момент времени t , который является длительностью излученного импульса, цель сместится на расстояние Vt и угол будет иметь значение θt . Если скорость цели большая и импульс имеет также большую длительность, то значение Vt не постоянно и угол θ изменяется во времени, т.е. является функцией времени θ ( t ). Тогда угол θ ( t ) может быть записан в виде:

где r – расстояние между ГАС и целью, V – скорость цели.
Скорость изменения расстояния между целью и ГАС имеет вид:
/ ytsin0n\
Vr(t) = V cos 6(t) = V cos (0O--J. (2)
Применяя разложение Тэйлора cos θ ( t ), выражение (2) представим в виде следующего вы-
ражения:
V2 sin2 60 V3 cos 60 ■ sin2 60 _
Vr^ ~ V cos 90 +--------- ■ t --------- ■ t2 + -..
r zrz
Эта скоростная компонента является результатом доплеровского искажения принятого сигнала, который может быть представлен как функция двух переменных: временной задержкой, вызванной изменением расстояния, и доплеровским масштабом, обусловленным относительной скоростью между ГАС и целью. В этом случае принятый сигнал может быть выражен в виде [5]:

2r т = —, c
«(0
c
где s ( t ) – излученный сигнал, τ – временная задержка, α – доплеровский коэффициент, c – скорость распространения колебаний.
Подставляя выражение (3) в формулу (6) и опуская члены выше второго порядка, получим следующее выражение для доплеровского коэффициента:
2 / V2 sin2 60 \ 2У 2У2 sin2 60
a(t) « 1 — Усо5в0 H--- t = 1--cos60--- t. (7)
c\ r ) c cr
Из выражения (7) видно, что коэффициент Доплера может быть аппроксимирован добавлением постоянного ускорения к скорости движения цели в основном направлении. При этом значение амплитуды ускорения выражается формулой:
Как известно, сигнал с гиперболической частотной модуляцией (ГЧМ) записывается в следующем виде [1, 3, 4]:
s(t) = A(t)exp p — Zn(l + /c/oO], (9)
где A ( t ) – комплексная огибающая, k – коэффициент модуляции, f 0 – начальная частота.
Для упрощения выводов произведём сдвиг по времени на величину to ~ , и тогда вы ражение (9) записывается следующим образом:
s(t - t0) = A(t - t0) exp — Zn(k/"ot)j. (10)
Подстановка (10) в формулу (4) представляет принятый сигнал как
Принимая, что расширение огибающей за счет параметра α незначительно, выражение (11) может быть преобразовано к следующему виду

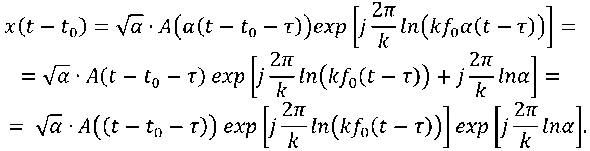
Теперь учтем выражение (7) для параметра α , и тогда принятый сигнал запишется как
x(t — t0) = Jaslt — t0 — t) exp
2n / 2У ■ cos0n
7 —Zn 1-- к \ c
21/2 sin2 60
rc
Учитывая также, что возможно приближение
Zn(l + y) « y,
выражение (13) принимает следующий вид:
2л ( xlt — t0) = ya ■ sit — t0— т)ехр j' — I —
2V ■ cos0o 2V2 sin2 60
c
" / 2V2 ■ sin260
/2тт-- \ rc / 2V2 ■ sin290' j2n------- \ krc
rc
2tt 2V ■ cos0o
2V ■cos0n t-j2n----- kc
= V«
• sit — tQ —
t)
exp\jl2nAft
+ A 2V2 ■ sin260 2V ■ cos0o где A/ = - – частотный сдвиг, A(p = — – фазовый сдвиг. krc kc Таким образом, из выражения (15) следует, что принятый сигнал может быть аппроксимирован путем сдвига по времени, частоте и фазе копии излученного сигнала. При согласованной обработке такого сигнала фазовый сдвиг будет проигнорирован, но частотный сдвиг приведёт к рассогласованию между принятым сигналом и сжимающим фильтром. Поэтому можно создавать сжимающий фильтр путём сдвига частоты копии излученного сигнала. Если угол θ0 неизвестен, то в этом случае необходимо использовать набор фильтров, – 786 – перекрывающих частотный диапазон Δf принятого сигнала. Это будет гарантировать устранение доплеровского искажения.
Список литературы О влиянии движения на сигнал с гиперболической частотной модуляцией
- Рихачек А. В. Сигналы, допустимые с точки зрения доплеровского эффекта. М.: ТИИЭР, 1966, 5. [Rihachek A. V. Signals acceptable from the point of view of the Doppler effect. Moscow, TIIER, 1966, 5 (in Rus.)]
- Тор. Техника сжатия импульса с большим произведением длительности на ширину спектра. Зарубежная радиоэлектроника, 1963, 12, 31–38 [The torus is a technique of pulse compression with a large product of the duration by the width of the spectrum. Foreign Radio Electronics, 1963, 12, 31–38 (in Rus.)]
- Элтес Р. А. Оптимальные сигналы для гидролокаторов с селекцией по скорости. М.: ТИИЭР, 1971, 11. [Eltes R. A. Optimal signals for speed-selective sonars. Moscow, TIIER, 1971, 11 (in Rus.)]
- Altes R.A., Titlebaum E. L. Bat signals as optimally Doppler tolerant waveforms. I.A.S.A., 1970, 48, 1014–1020.
- Rihaczek A. W. Hrinciples of high – resolution radar. Mc Graw – Hill. New York, 1969.
- Патент № 2711420 C 1 Российская Федерация, МПК G01S 15/34. Способ обработки сигналов с гиперболической частотной модуляцией: № 2018138434: заявл. 30.10.2018: опубл. 17.01.2020 / В. И. Лушанкин, Д. А. Бескин, К. С. Котляров; заявитель Федеральное государственное казенное военное образовательное учреждение высшего образования «Военный учебно-научный центр Военно-Морского Флота «Военно-морская академия им. Адмирала Флота Советского Союза Н. Г. Кузнецова”. [Patent No. 2711420 C 1 Russian Federation, IPC G01S 15/34. Signal processing method with hyperbolic frequency modulation: No. 2018138434: application 30.10.2018: publ. 17.01.2020 / V. I. Lushankin, D. A. Beskin, K. S. Kotlyarov; applicant Federal State State Military Educational Institution of Higher Education “Military Training and Scientific Center of the Navy Fleet “Naval Academy named after Admiral of the Fleet of the Soviet Union N. G. Kuznetsov” (in Rus.)]
- Мельник И.А., Сапрыкин А. В., Примакина Е. И. Применение акустических сигналов с гиперболической модуляцией в устройствах по обнаружению нарушителей в охраняемых зонах, Вестник Санкт-Петербургского университета МВД России, 2011, 2(50), 105–110 [Melnik I. A., Saprykin A. V., Primakina E. I. Application of acoustic signals with hyperbolic modulation in devices for detecting intruders in protected areas, Bulletin of the St. Petersburg University of the Ministry of Internal Affairs of Russia, 2011, 2(50), 105–110 (in Rus.)]
- Ицыксон М. Б. Применение составного импульса с гиперболической модуляцией частоты для оценки относительной скорости движения объекта, Труды всероссийской конференции “Прикладные технологии гидроакустики и гидрофизики”, 2016, 13, 363–365 [Itsykson, M. B. Application of a composite pulse with hyperbolic frequency modulation to estimate the relative velocity of an object, Proceedings of the All-Russian Conference “Applied Technologies of hydroacoustics and Hydrophysics”, 2016, 13, 363–365 (in Rus.)]
- Голубев А. Г. Алгоритмы обработки “пачечных” эхосигналов с v-образной частотной модуляцией, Гидроакустика, 2009, 10, 111–115 [Golubev, A. G. Algorithms for processing “bundle” echo signals with v-shaped frequency modulation, Hydroacoustics, 2009, 10, 111–115 (in Rus.)]
- Иванников А.П., Иванников Д. А. Метод синтеза импульсных сигналов с нелинейной частотной модуляцией, Радиотехнические и телекоммуникационные системы, 2015, 2(18), 11–18 [Ivannikov A. P., Ivannikov D. A. Method of synthesis of pulse signals with nonlinear frequency modulation, Radio engineering and telecommunication systems, 2015, 2(18), 11–18 (in Rus.)]
- Altar, W., Lacatos, F. «Signaling systems», U. S. Patent 3 157 874, November 17, 1964.
- Кук Ч., Бернфельд М. Радиолокационные сигналы. М.: Изд-во: Сов. радио, 1971, 566. [Cook Ch., Bernfeld, M. Radar signals. Moscow: Publishing house: Soviet Radio, 1971, 566. (in Rus.)]
- Желобенко Д.П., Штерн, А. И. Представления групп Ли. М.: Наука, 1982, 360. [Zhelobenko D. P., Stern, A. I. Representations of Lie groups. Moscow: Nauka, 1982, 360. (in Rus.)]
- Хьюитт Э., Росс Л. Абстрактный гармонический анализ. М.: Наука, 1975, 654 [Hewitt E., Ross L. Abstract harmonic analysis. Moscow: Nauka, 1975, 654. (in Rus.)]
- Сапрыкин А. В. Частотно-временные свойства гиперболических сигналов. XIV Межвузовская НТК «Военная радиоэлектроника: Опыт использования и проблемы подготовки специалистов», ВМИРЭ, СПб, Петродворец, 2003, 252–253 [Saprykin, A. V. Time-frequency properties of hyperbolic signals. XIV Interuniversity STC “Military radio electronics: Experience in the use and problems of training specialists”, VMIRE, St. Petersburg, Petrodvorets, 2003, 252–253 (in Rus.)]
