О возможности уравновешивания карьерных наклонных подъёмных установок

Автор: Попов Юрий Владимирович, Косарев Николай Петрович
Журнал: Горные науки и технологии @gornye-nauki-tekhnologii
Статья в выпуске: 12, 2011 года.
Бесплатный доступ
Приводится анализ возможности увеличения эксплуатационных показателей наклонного карьерного подъѐма за счѐт применения уравновешенных многоканатных подъѐмных установок.
Уравновешивание, подъѐмная установка, шкивы трения, карьер, подъѐмник, приводная станция, канат, гружѐная ветвь, статическое равновесие
Короткий адрес: https://sciup.org/140215260
IDR: 140215260 | УДК: 622.37
Текст научной статьи О возможности уравновешивания карьерных наклонных подъёмных установок
Рост производительности горной промышленности требует разрешения проблемы интенсификации работы рудничных подъёмных установок с целью повышения их производительности. Достичь поставленной цели можно за счёт увеличения скорости движения подъёмной системы или за счёт увеличения её грузоподъёмности.
Результатом конструктивных и научных изысканий в этой области стало множество разработанных и реализованных систем вертикального подъёма с энергетическим эффектом уравновешивания.
Идея уравновешивания наклонных подъёмных установок интересна, прежде всего, тем, что уравновешивание позволяет обеспечить высокопроизводительный подъём установками большой грузоподъемности, в энергетически эффективном режиме работы. Такие установки могут успешно эксплуатироваться, в качестве ключевого звена в комбинированной транспортной системе на открытых горных работах [1].
Наиболее рациональной, с точки зрения, уменьшения массогабаритных показателей электромеханического оборудования при обеспечении высокой грузоподъёмности будет многоканатная подъёмная установка.
На современном этапе развития горной промышленности всё большее развитие получают многоканатные подъёмные установки с канатоведущими шкивами трения расположенными на уровне земли. Для многоканатного карьерного подъёма такая схема является вообще единственно возможной.
В связи с этим, разработано и разрабатывается множество новых схем уравновешенных наклонных подъёмных установок отчасти решающих поставленную задачу, но не лишенных серьёзных недостатков [2, 3].
Исследуем одну из предлагаемых полезных моделей на предмет определения оптимального режима работы такой установки (см. рис. 1).
Рассматриваемая модель уравновешенной многоканатной наклонной подъёмной установки [4] состоит из: приводных шкивов трения с наземным расположением, копровых шкивов, расположенных на разгрузочной эстакаде, тяговых головных канатов, скиповых подъёмных сосудов для наклонных подъёмных установок, рельсовых путей с канатоподдерживающими роликами, дополнительной приводной станции с двухбарабанным органом навивки и тягового уравновешивающего стального каната круглого сечения.
В данной схеме уравновешивание достигается тем, что установка снабжена дополнительной приводной станцией 1, состоящей из двух барабанных органов навивки с дополнительными тяговыми уравновешивающими канатами 2 и общим приводом, расположенной ниже положения подъёмных сосудов при их загрузке (см. рис.1). В качестве дополнительной приводной станции может использоваться двухбарабанная подъёмная машина с однослойной или многослойной навивкой уравновешивающего каната. Уравновешивающее усилие будет складываться из силы тяжести уравновешивающего каната, а также из силы натяжения создаваемого дополнительной приводной станцией.
F yp . общ = F yp + ( L - x ) • q • g • Sinv O ) , (1)
где F - общее уравновешивающее усилие, Н; F - сила натяжения, создаваемая дополнительной приводной станцией, Н; x - путь, пройденный подъёмным сосудом, м; L – длина пути транспортирования, м; g – ускорение свободного падения на поверхности земли, м/с 2 ; q – линейная масса уравновешивающего тягового каната, кг/м; а - угол наклона пути транспортирования, рад.
Таким образом, предлагаемая схема подъёмной установки (см. рис.1) позволяет производить уравновешивание гружёной и порожней ветви путём создания управляемого усилия натяжения со стороны порожней ветви, независимо от положения подъёмного сосуда. Эта особенность является основным и очевидным преимуществом рассматриваемой схемы уравновешенного карьерного подъёмника, по отношению к наиболее близким известным, до последнего времени, моделям.
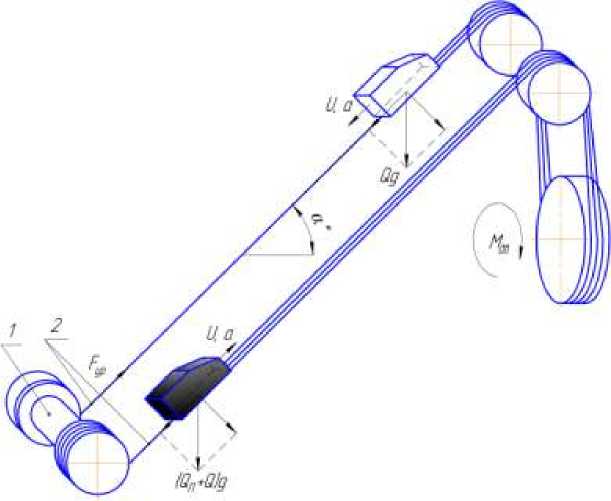
Рис.1. Модель уравновешенной многоканатной карьерной подъёмной установки с дополнительной приводной станцией.
Преобразуем известное выражение основного динамического уравнения для подъёмной установки, в соответствии с конструктивными особенностями рассматриваемой полезной модели (рис.1).
Тогда основное динамическое уравнение будет иметь вид:
Fa = Fa - Fi - F6d + ki " Q • g + mt a .
Где Fa усилие со стороны гружёной ветви.
Fr = (Qn + Q + (L - x)P + qx)g • sin a .(3)
Где р – линейная масса головного каната кг/м; q – линейная масса хвостового каната кг/м; х – путь пройденный подъёмным сосудом, м.
Усилие со стороны порожней ветви определиться из выражения:
F =(Q+(L - x )q+px) g • sin a;(4)
Уравновешивающее усилие, развиваемое приводной станцией, призвано компенсировать статическое неравенство в гружёной и порожней ветвях подъёмной установки. С другой стороны, чем больше величина создаваемого усилия, тем выше энергетические затраты (т.к. дополнительная станция имеет электрический привод) и давление на футеровку канатоведущего шкива. Увеличение уравновешивающего усилия также приводит к повышению удельного давления головных канатов на футеровку приводного шкива.
Допускаемое давление на футеровку канатоведущего шкива не должно быть больше з = 2,5 МПа. Таким образом, можно выделить первый ограничительный фактор уравновешивающего усилия создаваемого дополнительной приводной станцией – по допускаемому давлению на футеровку.
Математически его можно выразить из уравнения для определения фактического давления канатов на футеровку:
д > N Г + N П + FУР
Dm • d • n • g • 10 5
Где: N г – натяжение головных канатов со стороны гружёной ветви, Н; N п – натяжение головных канатов со стороны порожней ветви, Н; F -
Усилие натяжения хвостовых канатов, создаваемое дополнительной приводной станцией, Н.
Таким образом, ограничительный фактор уравновешивающего усилия запишется в следующем виде:
Fyp < 3 • D • d • n • g • 105-(Nr + Nn) . (6)
Где: D – диаметр приводного шкива трения, м; d – диаметр головного каната, м; з - допускаемое давление на футеровку, МПа.
Проскальзывание головных канатов по футеровке приводных шкивов многоканатной подъёмной установки относится к аварийным явлениям и считается недопустимым при работе установки в нормальном режиме.
Существующие на сегодняшний день методики расчета, предлагают оценивать вероятность опасности проскальзывания канатов с помощью коэффициента безопасности против скольжения. Его величина определяется как отношение максимального значения силы трения на окружности навивки, к разности натяжений в гружёной и порожней ветвях подъёмной установки:
(N n + F yp )( e f - 1) Nr - N п - F yp И д д
Второй ограничивающий фактор (по условию нескольжения головных канатов по футеровке приводного шкива) можно выделить из выражения (7):
F yp -
V е + И д J
-N
П
Где: f - коэффициент трения между шкивом и канатом; в - угол обхвата шкива канатом, рад и=1,25 - коэффициент безопасности против скольжения.
Таким образом, искомое уравновешивающее усилие, создаваемое дополнительной приводной станцией должно находиться в области решения системы неравенств:
' F yp < 3 • D ш • d г • n г • g ^ 10 5 -(N г + N п )
<
F
УР
-
N Г • И -
V е в - 1 + И д J
-
N П
Если же учитывать, что неоправданное завышение уравновешивающего усилия значительно повлияет на размеры, и, как следствие, на стоимость подъёмной установки, то появляется необходимость в стремлении к минимизации его значения. За закон изменения уравновешивающего усилия, в этом случае, можно принять нижнюю границу области решения системы неравенств (9).
Тогда:
F
УР
N г " М д
e ef к е
-
- 1 + М д )
N
П
.
Представим уравнение 10 и неравенство 6 отдельными функциями от положения подъёмного сосуда.
F rp ( х ) = 5 • D ш • d г • n г • g - 10 5 -(N г + N п ) (11)
F6a( 5 ) =
I _N • M - к a a" - 1 + М , )
- N
Где функция F (х) является верхней границей уравновешивающего усилия создаваемого дополнительной приводной станцией.
Превышение уравновешивающего усилия над этой границей приведёт к увеличению давления каната на футеровку выше допустимого значения.
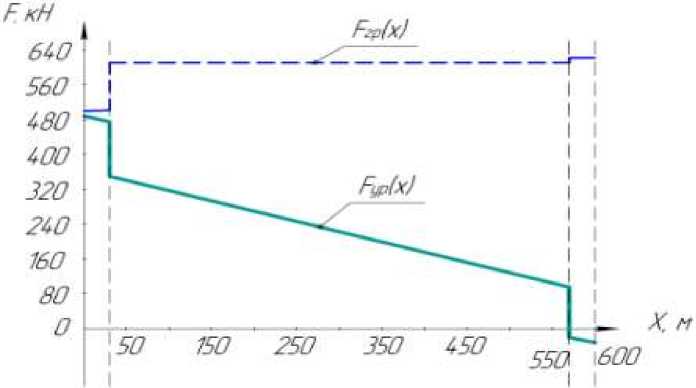
Рис. 2. Зависимость дополнительного уравновешивающего усилия от положения подъёмного сосуда для трёхпериодного режима работы подъёмной установки
Из приведённых графиков (рис. 2.) видно, что уравновешивающее усилие, создаваемое дополнительной приводной станцией (для схемы по рис. 1.) должно находиться в пределах приведённых зависимостей. При этом, наибольшее уравновешивающее усилие необходимо создавать в начале подъёмной операции, что подтверждается основами теории расчёта рудничного подъёма, а давление канатов на футеровку шкива трения в этот момент должно быть минимальным.
Заключение
Список литературы О возможности уравновешивания карьерных наклонных подъёмных установок
- Носырев Б.А. Схемы карьерных наклонных подъѐмных установок, их оценка и области применения.//Труды Свердловского горного института. Вып. 97. -1972. -с. 3 -6.
- Попов Ю.В. Новые возможности карьерных подъѐмников. Горный информационно-аналитический бюллетень. -М.: Изд. «Горная книга», 2009. -Отдельный выпуск №16. -С. 322-325.
- Быков В.Л. Многоканатные подъемные установки с канатоведущими шкивами для глубоких карьеров.//Изв.вузов. Горный журнал, 1969. -№ 4. -С. 124-130.
- Попов Ю.В., Тимухин С.А., Садыков Е.Л. Многоканатная наклонная подъемная установка./Патент № 107286 Дата регистрации в Росреестре 10.08.2011.
