Об экспериментальной идентификации нелинейного динамического поведения конструкции малого космического аппарата

Автор: Иголкин А.А., Филипов А.Г., Баляба М.В., Глазков И.Г.
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Информатика, вычислительная техника и управление
Статья в выпуске: 6 т.23, 2021 года.
Бесплатный доступ
В данной статье рассмотрено экспериментальное исследование нелинейного динамического поведения конструкции малого космического аппарата. Для получения достоверной конечно-элементной модели, описывающей динамическое поведение натурного объекта, было проведено экспериментальное исследование конструкции малого космического аппарата. В ходе эксперимента были получены значения перегрузок при разных режимах воздействия. Результаты перегрузок отдельных приборов и большей части конструкции малого космического аппарата не показали убедительного нелинейного поведения. Однако, экспериментальные данные в локальных местах конструкции выявили явный нелинейный характер динамического поведения. Эти результаты послужат в дальнейшем для более достоверного определения нагрузок на конструкцию исследуемого объекта.
Конечно-элементная модель, перегрузка, нелинейное динамическое поведение, виброускорения, амплитудно-частотная характеристика
Короткий адрес: https://sciup.org/148323601
IDR: 148323601 | УДК: 629.76.015.4 | DOI: 10.37313/1990-5378-2021-23-6-140-148
Experimental identification of the nonlinear dynamic behavior of the design of a small space vehicle
Obviously, there are no constructs in nature that describe linear dynamic behavior. However, it is customary to conduct research on such systems, with some exceptions, using the principle of linearization. Nevertheless, with the growth of requirements for modern space technology, a decrease in their mass and size, and a reduction in the time of their ground-based experimental development, it is not permissible not to take into account the nonlinearity in the design, since they become more nonlinear. As you know, rocket and space technology at the stages of transportation to the operating organization, during launch, in orbit, is subjected to dynamic loads. To ensure the smooth operation of space technology, it is necessary to develop the most reliable, that is, accurately describing a full-scale object, a finite element model. It will serve, in turn, for load calculations and strength calculations. This article discusses an experimental study of the nonlinear dynamic behavior of the structure of a small spacecraft. At the initial stage of the work, the amplitude-frequency characteristics of the research object were determined for forward and backward scanning. This approach did not reveal any obvious nonlinearity in the design of the small spacecraft. Then, having previously selected the proposed installation locations for the sensors, a number of experiments were carried out at the resonant frequencies of the small spacecraft, during which the values of the overloads were obtained for different modes of exposure. The results of overloading individual instruments and most of the small spacecraft design did not show convincing nonlinear dynamic behavior. However, experimental data at local locations in the structure revealed a clear non-linear dynamic behavior. These results will serve in the future when validating the finite element model of a small spacecraft for a more reliable determination of the loads on the structure.
Текст научной статьи Об экспериментальной идентификации нелинейного динамического поведения конструкции малого космического аппарата
Как известно, не существует конструкций, динамическое поведение которых линейно, но принято исследовать такие конструкции, за исключением крупногабаритных трансформируемых конструкций [1-3], используя принцип линеаризации. Так, T.K. Caughey в своих основополагающих статьях [4-6] предложил заменить нелинейный осциллятор с внешним гауссовым возбуждением на линейное с таким же возбуждением, что среднеквадратичная ошибка между реальными нелинейными и линеаризованными системами сводится к минимуму в статистическом смысле. В литературе его часто связывают с методом статистической линеаризации, введенным Казаковым [7].
В связи с постоянным интересом к расширению диапазона характеристик конструкций космических аппаратов при одновременном сокращении их экспериментальной наземной отработке, существует необходимость в проек-
Филипов Александр Геннадьевич, аспирант.
Баляба Максим Владимирович, кандидат технических наук, инженер учебной лаборатории пневмогидравлических систем.
Глазков Игорь Евгеньевич, аспирант.
тировании более лёгких, сложных и, как следствие, более нелинейных конструкций. Поэтому довольно противоречиво наблюдать, что при анализе таких конструкций не учитываются их нелинейное динамическое поведение. Действительно, основные принципы, применимые к линейным динамическим системам и составляющие основу модального анализа, больше не действуют при обнаружении нелинейности в поведении конструкции.
Любой космический аппарат и его системы подвергаются динамическим нагрузкам как при запуске, так и на орбитальном участке полёта. Для обеспечения безаварийного выведения и штатной работы аппаратуры на всём сроке эксплуатации космического аппарата, необходимо получить как можно более достоверную математическую конечно-элементную модель объекта исследования. Это позволит наиболее точно оценить действующие на него нагрузки и степень влияния нелинейности на его динамические характеристики.
В работах авторов [8-12] проведены исследования по выявлению нелинейного динамического поведения. Так, например, K. Carney [10] проводил анализ нелинейности динамического поведения космического аппарата CASSINI. Он выяснил, что опоры фермы, которые используются на Cassini, могут вызвать нелинейность из-за сложности устранения зазоров и при попытке протестировать структуры с этим классом нелинейности важно иметь возможность возбуж- дать исследуемый образец до высоких уровней отклика. K. Carney пришёл к выводу, что можно определить истинный отклик конструкции на критических уровнях и, возможно, линеаризовать его.
Однако, ввиду высшей степени «индивидуалистического» характера нелинейных систем, не существует общего метода их анализа, который можно было бы применить во всех случаях, как при модальном анализе [13].
МЕТОД ИССЛЕДОВАНИЯ
Объектом исследования в данной статье является динамическое поведение малого космического аппарата дистанционного зондирования земли (МКА). Динамический макет МКА был закреплен на испытательную оснастку (см. рис. 1), в соответствии с граничными условиями его выведения с помощью ракеты-носителя.
На начальном этапе исследования был проведён эксперимент по выявлению нелинейного динамического поведения методом прямого и обратного сканирования амплитудно-частотных характеристик (АЧХ), но каких-либо адекватных результатов получить не удалось. То есть, смещение полученных резонансных частот между прямым и обратным сканированием не было выявлено (см. рис. 2).
Для исследования нелинейности в динамическом поведении МКА были выбраны некоторые его элементы (бортовая аппаратура и корпус телескопа). Схемы расположения датчиков на МКА приведены на рисунках 3, 4, где позиции указывают на места установки датчиков. В скобках указаны места их установки с противоположной стороны МКА.
В ходе эксперимента были проведены замеры при возбуждении МКА вдоль горизонтально оси Z.
Предварительно были определены АЧХ испытательной оснастки с целью обнаружения её влияния на результаты эксперимента в диапазоне частот до 100 Гц.
Испытательные режимы для определения нелинейного характера поведения задавались в соответствии с резонансными частотами, полученными при выявлении АЧХ МКА (см. рисунок 2). Резонансные частоты исследуемого объекта были определены в соответствии с методом, описанным в предыдущей работе автора [14]. На каждой резонансной частоте задавались уровни в соответствии с таблицей 1.
РЕЗУЛЬТАТЫ
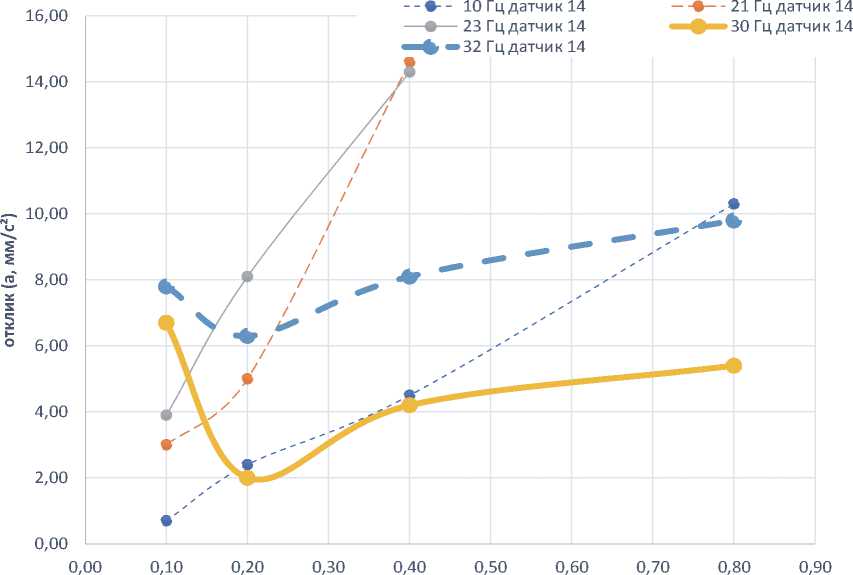
По завершению испытаний по режимам таблицы 1 были получены результаты, приведенные в таблице 2 и рисунке 5-8. В таблице и на

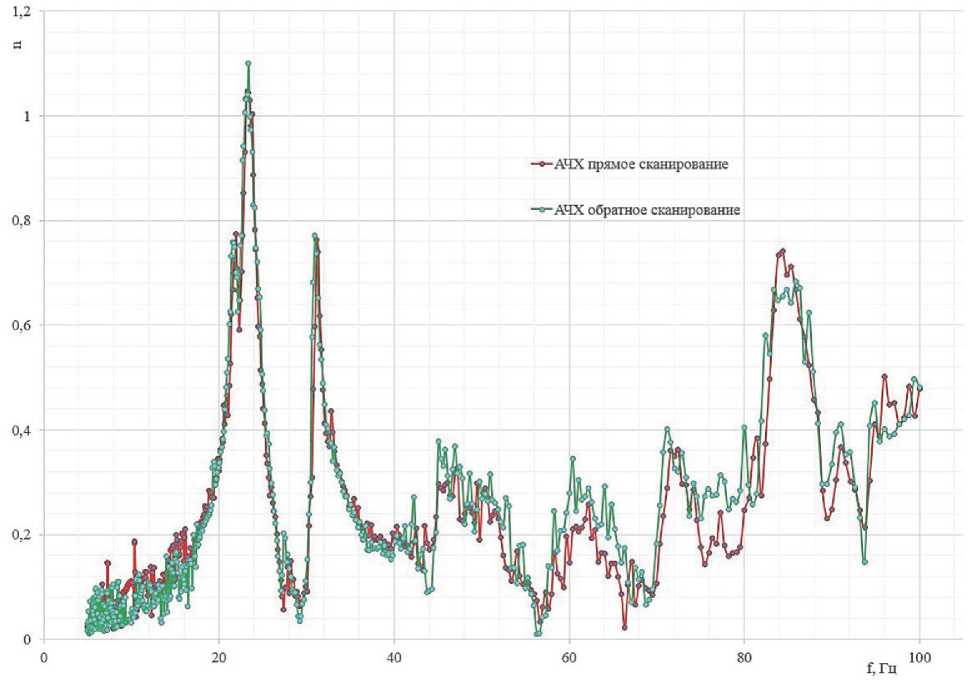
Рисунок 2 – АЧХ МКА при прямом и обратном сканировании
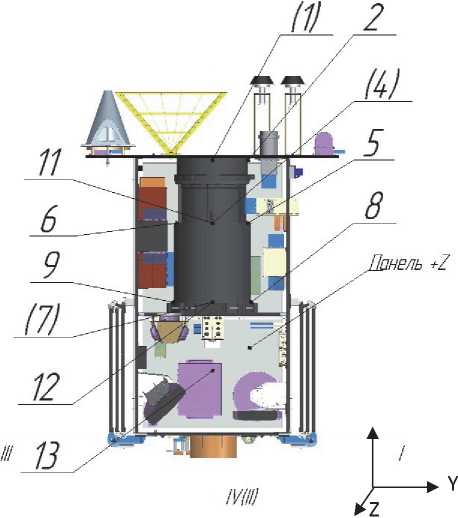
Рисунок 3 – Схема расположения датчиков на элементах МКА рисунках 5-8 приведены значения отклика в ускорениях (мм/с2) по датчикам, имеющим заметные результаты.
Как видно из таблицы 2, на частотах 30 и 32 Гц в местах установки датчиков на сотопанели и
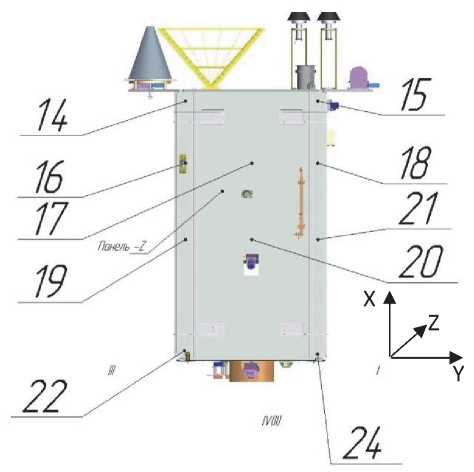
Рисунок 4 – Схема размещения датчиков снаружи на МКА (на панели –Z)
нижней части рамы конструкции МКА мы получили явный нелинейный отклик конструкции, которая имеет локальный характер. Данные эксперимента по другим частотам и местам установки датчиков имеют более линейную картину динамического поведения. Учитывая результаты сканирования АЧХ (прямое и обратное), а
Таблица 1 – Режимы определения нелинейности конструкции
|
Внутри КА (на телескопе) |
||||||
|
Резонансные частоты, Hz |
Уровни нагружения, g |
|||||
|
15.5 |
0.1 |
0.2 |
0.3 |
0.4 |
0.5 |
0.8 |
|
29 |
0.1 |
0.2 |
0.3 |
0.4 |
0.5 |
0.8 |
|
С внешней стороны на раме КА |
||||||
|
Резонансные частоты, Hz |
Уровни нагружения, g |
|||||
|
10 |
0.1 |
0.2 |
0.4 |
0.8 |
- |
- |
|
21 |
0,1 |
0,2 |
0,4 |
- |
- |
- |
|
23 |
0,1 |
0,2 |
0,4 |
- |
- |
- |
|
30 |
0,1 |
0,2 |
0,3 |
0,4 |
0,8 |
- |
|
32 |
0,1 |
0,2 |
0,3 |
0,4 |
0,8 |
- |
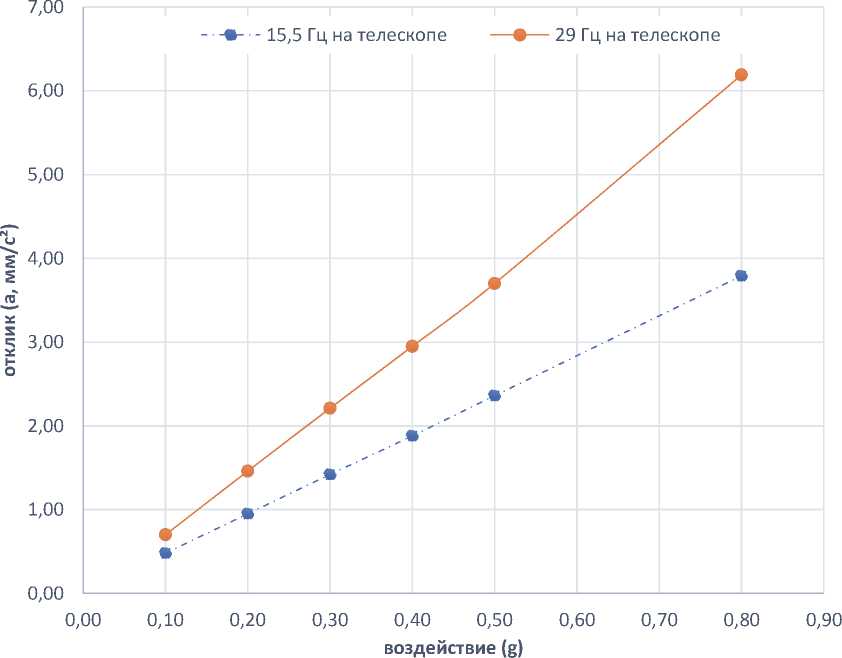
Рисунок 5 – Результаты испытаний внутри МКА (телескоп)
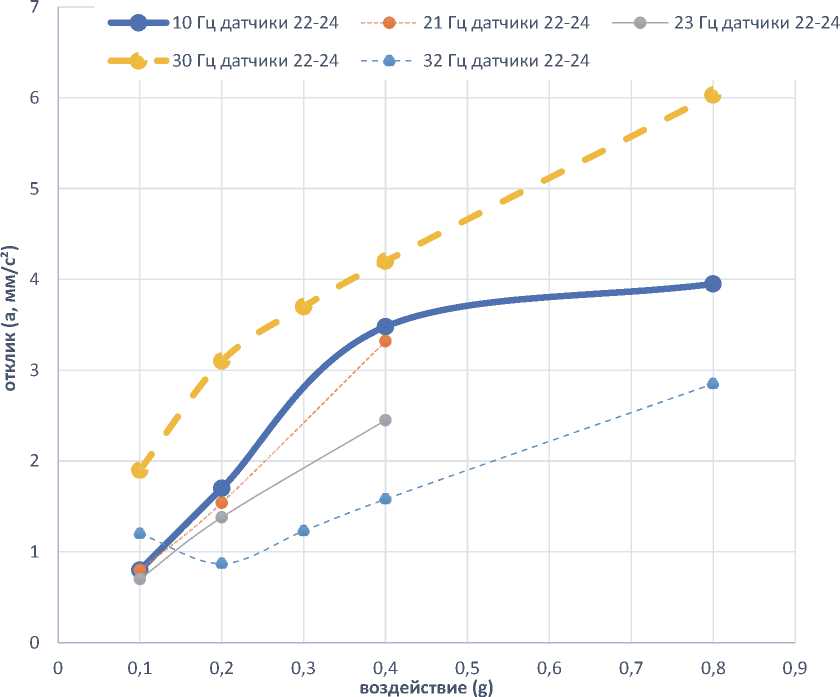
Рисунок 6 – Результаты испытаний у основания МКА (рама)
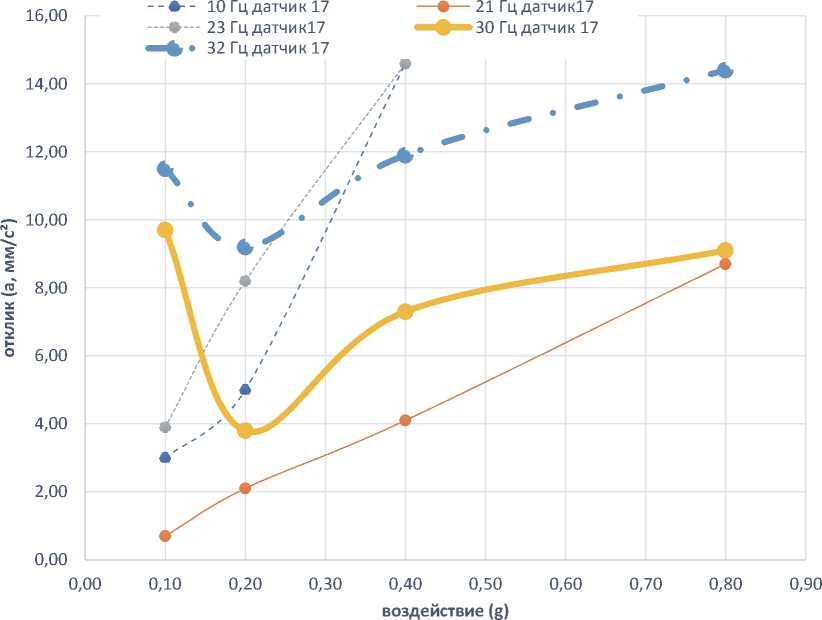
Рисунок 7 – Результаты испытаний на оболочке МКА (сотопанель)
воздействие (g)
Рисунок 8 - Результаты испытаний на верхней части МКА (рама)
Таблица 2 - Результаты испытаний (значения перегрузок)
Уравнение движения модели в данном случае примет вид:
M x (t, 0) + C x (t, 0) + Kx((t, 0) +
+f„l (x(t, 0), X(t, 0), 0) = f(t), где M, C, K ERNxN - матрицы массы, демпфирования и жесткости, соответственно. f(t) GRNx1 - внешнее возбуждение. X(t, 6), X(t, 6), x((t, 6) ERNx1 - векторы ускорения, скорости и перемещение, соответственно. fni (x(t, 6), Ш 6), 6) еRNx1 - нелинейная восстанавливающая сила.
Стоит отметить, что нелинейное динамическое поведение мы наблюдаем на резонансных частотах, очень близких друг к другу. Можно предположить, что это связано с явлением нелинейного биения, при которых две или более соизмеримых линеаризованных частоты обмениваются энергией между собой [15].
При расчёте динамических нагрузок необходимо будет учесть данные результаты путём коррекции матрицы демпфирования для определённых элементов конструкции.
ВЫВОДЫ
При анализе полученных результатов можно наблюдать, что отклики конструкции на разные уровни нагружения имеют нелинейный характер. Вероятно, это связано с диссипативными характеристиками конструкции и в данном случае имеет чисто локальный характер. Это и нужно выяснить на следующем этапе исследования.
По результатам исследования данного этапа работ можно сделать предварительный вывод о том, что явное нелинейное поведение не характерно для конструкций, имеющих малые габариты, как в случае с бортовой аппаратурой, и жесткую конструкцию - в случае с корпусом объектива.
Список литературы Об экспериментальной идентификации нелинейного динамического поведения конструкции малого космического аппарата
- Халиманович В.И. Проблемы экспериментального модального анализа крупногабаритных трансформируемых космических конструкций [Текст] / В.И. Халиманович, В.А. Бернс, Д. А. Крас-норуцкий, В.Н. Лушин, Д.А. Маринин // материалы XXIII Международной научно-практической конференции, посвященной памяти генерального конструктора ракетно-космических систем академика М. Ф. Решетнева (11-15 нояб. 2019, г. Красноярск): в 2 ч. под общ. ред. Ю.Ю. Логинова. — Красноярск: СибГУ им. М.Ф. Решетнева, 2019. — Ч. 1. - С. 151-153. - URL: https://reshetnev.sibsau. ru/page/materialykonferentsii (дата обращения 14.09.2021).
- Бернс В.А. Расчетно-экспериментальный метод модального анализа крупногабаритных трансформируемых конструкций [Текст] / В.А. Бернс, Д.А. Красноруцкий, П.А. Лакиза, Д.А. Маринин, Е.П. Жуков // материалы XXIII Международной научно-практической конференции, посвященной памяти генерального конструктора ракетно-космических систем академика М.Ф. Решетнева (11-15 нояб. 2019, г. Красноярск): в 2 ч. / под общ. ред. Ю.Ю. Логинова. — Красноярск: СибГУ им. М. Ф. Решетнева, 2019. - Ч. 1. - С. 82-83. — URL: https:// reshetnev.sibsau.ru/page/materialykonferentsii (дата обращения 14.09.2021).
- Ибрахим С.Р. Построение динамических моделей конструкций по измеренным комплексным собственным формам колебаний [Текст] / С.Р. Ибрахим // Аэрокосмическая техника. - 1984. - Т. 2, № 2. - С. 153-158.
- Caughey, T.K. Equivalent linearisation techniques / T.K. Caughey // Journal of the Acoustical Society of America. - 35 (1963). - pp. 1706-1711 (Sections 1, 3.1)
- Caughey, T.K. Response of Van der Pol's oscillator to random excitations / T.K. Caughey // Journal of Applied Mechanics. - 26 (1959). - 345-348 (Section 3.1).
- Caughey, T.K. Random excitation of a system with bilinear hysteresis/ T.K. Caughey // Journal of Applied Mechanics. - 27 (1960). - 649-652 (Section 3.1).
- Kazakov, I.E. Approximate probabilistic analysis of the accuracy of operation of essentially nonlinear systems / I.E. Kazakov // Automatika i Telemekhanika. - 17 (1956). - pp. 423-450 (Section 3.1).
- Renson, L. Nonlinear modal analysis of the SmallSat spacecraft / L. Renson, G. Kerschen, A. Newerla // Topics in Nonlinear Dynamics. - Belgium.- Vol. 3. -January 2012. - Pp. 45-60. DOI: 10.1007/978-1-4614-2416-1_5.
- Carney, K. Nonlinear dynamic behavior in the Cassini spacecraft modal survey / K. Carney, I. Yunis, K. Smith, C.Y. Peng. - URL: https://www.academia. edu/51735334/Nonlinear_Dynamic_Behavior_in_ the_Cassini_Spacecraft_Modal_Survey (дата обращения 14.09.2021).
- Peeters, M. Dynamic testing of nonlinear vibrating structures using nonlinear normal modes / M. Peeters, G. Kerschen, J.C. Golinval // Journal of Sound and Vibration. - 330(2011). - pp. 486-509.
- Jang, J. Model updating of a full-scale FE model with nonlinear constraint equations and sensitivity-based cluster analysis for updating parameters / Jinwoo Jang, Andrew W. Smyth // Mechanical Systems and Signal Processing, 83 (2017), рр. 337-355.
- Lim, J.H. A correlation study of satellite finite element model for coupled load analysis using transmissibility with modified correlation measures / Jae Hyuk Lim // Aerospace Science and Technology, 33 (2014), pp. 82-91.
- Kerschen, G. Past, present and future of nonlinear system identification in structural dynamics / Gaëtan Kerschen, Keith Worden, Alexander Vakakis, JeanClaude Golinval // Mechanical Systems and Signal Processing, Elsevier, 2006, 20 (3), pp.505-592.
- Иголкин, А.А. Модальный анализ динамического макета малого космического аппарата «АИСТ-2Д» / А.А. Иголкин, А.И. Сафин, А.Г. Филипов // Вестник Самарского университета. Аэрокосмическая техника, технологии и машиностроение. - 2018. -Т. 17. - №2. - C. 100-108. doi: 10.18287/2541-75332018-17-2-100-108.
- Nayfeh, A.H. Nonlinear Oscillations / A.H. Nayfeh, D.T. Mook. - Wiley-Interscience, New York, 1979 (Sections 1, 2.1, 3.1, 5.1, 6.5; Introduction Section 3).
