Об одной задаче численного секционирования в офтальмологии

Автор: Разгулин Александр Витальевич, Ирошников Никита Георгиевич, Ларичев Андрей Викторович, Павлов Станислав Дмитриевич, Романенко Татьяна Евгеньевна
Журнал: Компьютерная оптика @computer-optics
Рубрика: Обработка изображений: Восстановление изображений, выявление признаков, распознавание образов
Статья в выпуске: 5 т.39, 2015 года.
Бесплатный доступ
Рассматривается задача восстановления изображений (секционирования) сечений глазного дна, находящихся на различной глубине, на основе стека изображений, полученных при быстрой перефокусировке изображающей системы и представляющих собой суперпозиции истинных сечений трёхмерного объекта с размытыми изображениями соседних по глубине сечений. Для решения соответствующей задачи трёхмерной деконволюции используется неявный итерационный метод регуляризации в Фурье-плоскости. Приведённые результаты математического моделирования свидетельствуют о возможности эффективного численного секционирования в задачах офтальмологии при наличии помех и шумов различной природы.
Секционирование, трёхмерная деконволюция, свёртка, глазное дно, итерационный метод регуляризации
Короткий адрес: https://sciup.org/14059423
IDR: 14059423 | DOI: 10.18287/0134-2452-2015-39-5-777-786
On a problem of numerical sectioning in ophthalmology
We consider a problem of eye-fundus image reconstruction from different-depth fundus sections based on an image stack, with the images obtained via imaging system''s fast refocusing as superposition of 3D object sections and blurred images of adjacent-depth sections. An implicit iterative regularization method in the Fourier plane is used for 3D deconvolution. The results of mathematical modeling have demonstrated that the numerical sectioning shows promise when processing ophthalmological images distorted by various types of noise.
Текст научной статьи Об одной задаче численного секционирования в офтальмологии
Важной задачей, возникающей в офтальмологии, является неинвазивное восстановление изображения 3-мерной структуры различных отделов глаза (например, сетчатки) для последующей диагностики их заболеваний. Наиболее распространённым заболеванием сетчатки в мире на сегодня является диабетическая ретинопатия, которая служит основной причиной необратимой слепоты в развитых странах мира [1]. В клинических условиях активность ретинопатии оценивают по параметрам офтальмоскопической картины, толщины сетчатки, сосудистых изменений сетчатки, количеству микроаневризм, экссудатов и кровоизлияний. В большинстве случаев современная диагностика ретинопатий основана на классических способах офтальмоскопии или фоторегистрации изображений сетчатки в видимом спектре, а при дифференциальном диагнозе типа ретинопатии применяют флюоресцентную ангиографию [2]. Метод оптической когерентной томографии [3] также приобретает популярность в качестве альтернативной флюоресцентной ангиографии малоинвазивной методики изучения микроструктуры сетчатки. При этом трёхмерная реконструкция изучаемого участка программным методом реализована лишь в нескольких моделях оптических когерентных томографов сетчатки, а получаемые томограммы не позволяют исследователю в полной мере оценить ангиоархитектонику сетчатки. Кроме того, сосуды сетчатки, лежащие на её поверхности, имеют гиперрефлективные свойства, затрудняя оценку расположенной под ними ткани сетчатки. Также приходится учитывать и соответствующим образом компенсировать артефакты типа разрыва участков изображения, вызванные движением живого глаза [4]. В этой связи быстрая трёхмерная деконволюция сосудов с последующей трёхмерной реконструкцией прилегающей ткани может оказаться превосходящей по информативности клинической методикой оценки экссудативных форм ретинопатии.
Один из перспективных методов восстановления основан на быстрой перефокусировке изображающей системы, например с использованием методов адаптивной оптики [5], для получения стека изображений глазного дна, находящихся на различной глубине, с последующим восстановлением трёхмерной структуры известными методами. Получающиеся на этом пути изображения в каждой фокальной плоскости представляют собой суперпозицию истинного сечения трёхмерного объекта в данной фокальной плоскости с размытыми изображениями соседних по глубине сечений. Кроме того, типичной является ситуация, при которой на истинное изображение в фокальной плоскости накладываются аберрации оптической системы глаза, флуктуации фиксации, а при его регистрации приходится также учитывать искажения светочувствительных сенсоров. Таким образом, возникает проблема устойчивого к помехам получения «очищенного» от указанных искажений стека изображений сечений глазного дна по глубине для его последующего использования в трёхмерной реконструкции.
Известным аналогом данного подхода является метод цифрового секционирования в биомикроскопии (см., например, [6]; [7], гл. 22; [8], гл. 14). В приближении полностью некогерентной изопланарной оптической системы изображение трёхмерного объекта описывается уравнением i (x, y, z) = o (x, y, z) * h (x, y, z), (1) где i(x, y, z) – наблюдаемое изображение (интенсивность), o(x, y, z) – искомый объект, h(x, y, z) – трёхмерная функция точечного источника (point spread function, PSF), * – знак операции трёхмерной свёртки. С помощью известной теоремы о свёртке связь между искомым объектом и его изображением в Фурье-пространстве записывается в виде поточечного произведения
I ( u, v, w ) = O ( u, v, w ) • H ( u , v, w ) (2)
соответствующих 3D фурье-образов I, O, H от функций i, o, h . Однако даже в идеальном случае, когда наблюдаемое изображение и функция точечного источника известны точно, однозначное нахождение фурье-образа O искомого объекта о из уравнения (2) затруднительно вследствие возможного обращения в ноль (или близости к нулю) мультипликатора H ( u , v , w ) в некоторых точках. Ситуация ещё более усложняется при работе с реальными данными эксперимента, когда в распоряжении имеются результаты наблюдения в конечном наборе секущих плоскостей z е { z 1 ,z 2, . , zN }, при этом как сами измерения, так и функция точечного источника, как правило, известны лишь приближённо. В этой связи особое значение имеет разработка специальных устойчивых методов решения уравнения вида (1), которые бы в наилучшей степени учитывали как специфику физической постановки задачи, связанной с характерными особенностями функции точечного источника рассматриваемой оптической системы глаза, так и требуемое соотношение производительность / точность в условиях реальных искажений, типичных для рассматриваемого класса задач офтальмологии.
ства ресурсоёмких вычислений обычно предполагается [6], что только ближайшие p (как правило, p = 1), лежащие снизу и сверху, соседние плоскости вносят существенный вклад в формирование изображения i m . Кроме того, рассматриваются только эффекты, вызванные дефокусировкой, причём игнорируется её влияние для функции точечного источника в фокальной плоскости, т.е. предполагается, что h 0- дельта -функция Дирака. В результате получается приближённое соотношение
о = i mm
V о
Z o n ^ п - m .
n = m ± 1, m ± 2, . , m ± p
Поскольку под знаком суммы искомые функции o n также неизвестны, то в простейшем случае используются их аппроксимации вида
о = c i m 2 m
C Z n = m ± 1, m ± 2, . ,i
( i n * f ) h n - j , m ± p
1. Постановка задачи и метод решения
Конкретизируем постановку задачи, связанную с отмеченной выше спецификой. Поскольку для обработки доступны сечения трёхмерного изображения глазного дна лишь в конечном наборе плоскостей, задаваемых его сечениями при z е { z 1 , z 2,..., z N }, причём количество таких сечений (10-15), как правило, на порядки меньше количества точек в каждом горизонтальном сечении, то имеет смысл перейти от симметричной по координатам ( x , y , z ) формы записи уравнения (1) к её дискретному по z аналогу следующего вида:
с эмпирически подбираемыми коэффициентами c 1,2, отвечающими за относительный вклад информации из фокальной и соседних плоскостей в формирование изображения, и высокочастотным фильтром f , который убирает низкочастотную информацию из областей размытия. Для повышения точности вычислений также используются итерационные варианты (3) и (4), при этом для сокращения вычислений итерации проводятся в фурье-образах. Например, итерационный аналог (4) имеет вид [6]:
О ( k + 1) = c,\I m 2 m
c1 Z onk) • Hn-jl, n=m ±1, m ±2,., m ± p )
k = 0,1, . , o n 0’ = I n.
i m = i ( x , У , z m ) = o m * h 0 +
+ Z n * m o ( X , У , z n ) * h n - m ( x , У ), m = 1,2, . , N ,
где * - знак операции двумерной свёртки, hn-m ( x , y ) = = h ( x , y , zn - zm ) A z . Нетрудно видеть, что с помощью уравнения (3) фактически описывается ситуация, в которой искомый достаточно тонкий объект аппроксимируется с помощью стека секущих плоскостей z = z m , расположенных на одинаковом расстоянии A z друг относительно друга, что приводит к соответствующей аппроксимации интеграла свёртки по переменной z . Уравнение (3) связывает наблюдаемое в плоскости z m изображение im с входящими в сумму изображением om * h 0 искомого объекта в фокальной плоскости и дефокусированными изображениями от соседних плоскостей z n +z m . Отметим, что уравнение (3) может использоваться также и вне связи с трёхмерной моделью (1), например, для моделирования трёхмерной изображающей системы со слоистой полупрозрачной структурой [9], причём толщина слоёв может быть различной.
Заметим, что при решении задачи секционирования в биомикроскопии в целях уменьшения количе-
Описанные методы (4), (5) отличаются простотой реализации и хорошо зарекомендовали себя для сравнительно грубой деконволюции в задачах флуоресцентной биологической микроскопии. Однако для задачи секционирования изображений отделов глазного дна, как отмечалось выше, приходится учитывать аберрации оптической системы глаза, флуктуации фиксации, а также учитывать помехи регистрирующих устройств, что приводит к необходимости разработки специальных устойчивых методов решения уравнения вида (3) в полной постановке, что предъявляет жёсткие ограничения на соотношение производительность / точность для рассматриваемого класса задач офтальмологии.
Хорошо известно, что задачи секционирования и деконволюции трёхмерных объектов являются весьма затратными относительно вычислительных ресурсов [6]. Поэтому большую роль играет выбор экономичных алгоритмов, использующих новейшие компьютерные технологии (см., например, [10], [11]). Имея в виду широкие возможности реализации идей распараллеливания алгоритмов на современных многопроцессорных системах (CPU или GPU), рассмотрим вытекающее из (3) соотношение, которое связывает соответствующие двумерные Фурье-образы
I m , O n , H n функций i , o , h в плоскости спектральных переменных ( u , v ):
N
I m ( u , v ) = S O n ( u , v ) • H n - m ( u , v), m = 1,2, . , N . (6)
n = 1
Таким образом, в каждой точке ( u , v ) Фурье-плоскости уравнение (6) задаёт систему линейных алгебраических уравнений (СЛАУ) с матрицей S размера N х N относительно вектора коэффициентов Фурье O = O ( u , v ) = ( O 1 ( u , v ), O 2( u , v ), . , O N ( u , v )) искомого объекта, которую, опуская параметры ( u , v ), можно записать в виде
SO = I , I = ( 1 1 , 1 2,..., I n ). (7)
Типичная для рассматриваемых прикладных задач ситуация состоит в том, что, несмотря на относительно небольшую размерность матрицы S, точно обратить её либо нельзя из-за нетривиального ядра, либо нецелесообразно из-за вычислительных ошибок.
Рассмотрим неявный итерационный метод для устойчивого нахождения решения СЛАУ (7) (см., например, [12] гл. 2; [13] гл. 2, п. 5). В обозначениях (7) метод зависит от параметра ц > 0:
O( k + 1) = ( E + ц S * S ) - 1 O( k ) + ц ( E + p S * S ) - 1 S * I , - (0) (8)
к = 1,2, . , O = (0,0, . ,0).
В [12] гл. 2 показано, что (8) задаёт регуляризирую-щий алгоритм (РА). В связи с этим отметим, что первая итерация метода (8) в сочетании с дополнительным правилом выбора параметра ц приводит к классическому методу регуляризации А.Н.Тихонова [14], что позволяет делать выводы о роли этого параметра.
Отметим, что метод (8) в терминологии ([12], гл. 5) относится к классу так называемых псевдоите-рационных методов. При соответствующей организации вычислительного процесса итерации можно реализовать в виде умножения на соответствующие степени матриц перехода в Фурье-плоскости. Это позволяет существенно экономить машинное время в ситуации, когда входные данные заданы с высокой точностью и, следовательно, получение соответствующего приближённого решения потребовало бы большого числа итераций. Кроме того, поскольку процесс (8) должен быть реализован в каждой точке выбранной области Фурье-плоскости, то в целом описанный подход допускает естественное и эффективное распараллеливание вычислительного алгоритма при использовании многоядерной структуры современных CPU и GPU.
-
2. Функция точечного источника
Остановимся подробнее на виде используемой PSF. В наиболее простой постановке источником изображения являются N полупрозрачных слоёв, отстоящих друг от друга на расстояние A z вдоль оптической оси. При точной фокусировке системы на один из слоёв возникает расфокусировка других сло-
ёв. Если апертура системы имеет характерный размер 2 r , фокусное расстояние f то дефокусировка слоя, смещённого на расстояние A z << f, равна D = A z / f 2 , а соответствующая стрелка прогиба на апертуре 2 r равна d = ( A z /2)х( r / f ) 2 . При этом степень размытия определяется фазовым сдвигом p s ( x , y , A znm ) и зависит от удалённости от плоскости фокусировки:
-
/ л ч J x 2 + У 2 2 n
Ps (x, У, Aznm ) = dnm ---2--Г = r л
-
= 0,375n( x 2 + y 2) | n - m\ ,
-
3. Результаты секционирования объекта «Секторы»
A z r2
nm dnm = 2 f 2 ’ где n - номер слоя, вклад которого учитывается при фокусировке на слое с номером m, Aznm - смещение слоя n относительно слоя m. Глубина объекта по координате z составляла 300 микрон. Расстояние между соседними слоями для случая стека из N = 5 секущих плоскостей тестовых изображений составляло 300/(N -1) = 75 микрон. Остальные параметры: % = 0,5 микрон, f=20 мм. Также в модели учитываются аберрации второго порядка p(x,y) = 0,5п(x2+ y2), не зависящие от номера плоскости. Таким образом, PSF изображающей системы в рассматриваемом случае принимает вид
h ( x , y , z n - z m ) =
= F ( M ( x , y ) • exp {i • P s ( x , y , A z nm ) + i • p ( x , y )})| 2 , где F - оператор двумерного преобразования Фурье, i 2 = -1. Отметим, что наличие зрачка в рассматриваемой оптической системе учитывается с помощью функции зрачка M ( x , y ), которая задаётся индикаторной функцией круга радиуса r :
M ( x , y ) = ind ( x 2 + y 2 < r 2 ) .
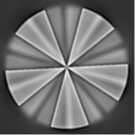
Рассмотрим тестовый объект «Секторы», который представляет собой трёхмерную структуру из пяти плоскостей, в каждой из которых расположено изображение секторов, но повёрнутое в каждой плоскости на определённый угол (см. рис. 1 а). Поскольку в рамках принятого приближения и в силу симметрии объекта в равноудалённых от центральной плоскости сечениях наблюдаются качественно схожие результаты, далее приводятся изображения только для слоя m = 2. Присутствие пространственно-однородных областей, характеризуемых различными пространственными масштабами, в сочетании с резкими переходами интенсивности приводят к широкому использованию такого рода объектов для тестирования качества различных методов деконволюции, и в частном случае секционирования. Наблюдаемое изображение при фокусировке в каждую плоскость состоит из исходного изображения, искажённого аберрациями второго порядка, и дефокусированных изображений из остальных плоскостей. В результате на рис. 1б хорошо видны искажения, связанные с размытием и наложением изображений, а также частичной инверсией интенсивности.
а)
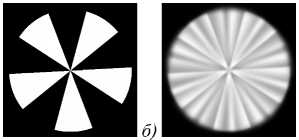
Рис. 1. Исходное сечение объекта «Секторы» (а) и наблюдаемое изображение сечения (б) в секущей плоскости m = 2
Задача секционирования состоит в восстановлении исходных изображений в каждой плоскости. Рассмотрим результаты работы неявного итерационного метода без шума в зависимости от параметров метода – коэффициента ц и количества итераций K. Эксперименты показали, что при ц >0,1 восстановленное изображение получается излишне сглаженным. Рассмотрим полученные результаты при ц = 0,1 (см. рис. 2) на примере слоя m =2. Видно, что увеличение числа итераций приводит к улучшению качества восстановления. Вместе с тем следует отметить эффект «насыщения», когда дальнейшие итерации метода (более 40) уже перестают оказывать существенный вклад в улучшение изображений. Аналогичная картина наблюдалась и при других значениях параметра ц.
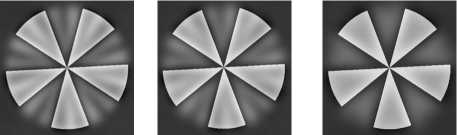
K = 5 K = 10 K = 40
Рис. 2. Зависимость от K ( ц = 0,1 ,т = 2 )
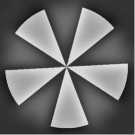
Уменьшение параметра ц в целом приводит к ухудшению качества восстановления вследствие усиления эффекта Гиббса («ringing effect») на контрастных границах объекта и вследствие этого нецелесообразно. Сравнение результатов секционирования при фиксированном числе итераций при разных ц показывает, что наилучшие результаты получаются при ц = 0,1 и 40 итерациях (см. рис. 3), а увеличение итераций не даёт эффекта, как и выбор других значений ц .
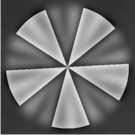
Рассмотрим особенности секционирования, когда на вход методу подаются дефокусированные изображения с аддитивным Гауссовым шумом порядка 1 % либо с пуассоновским шумом порядка 2 %, что соответствует порядка 100000 фотонов единичной интенсивности пикселя.
Характерно, что шум практически не заметен на фоне исходных дефокусированных изображений с соседних плоскостей (рис. 4 а , б ). Однако наличие шума влияет на качество секционирования.
На примере секционирования второго слоя рассмотрим влияние шума на качество работы алгоритма в зависимости от числа итераций при разных зна- чениях параметра ц. Из анализа рис. 5 видно, что, в отличие от случая без шума, с увеличением числа итераций восстановление может ухудшаться. Количество итераций должно быть согласовано с уровнем шума для получения приемлемых результатов: в рассматриваемом случае достаточно ограничиться 40
итерациями.
ц =0,1
ц = 0,01
Рис. 3. Результаты секционирования слоя m = 2 при K = 40 и различных ц
ц = 0,001
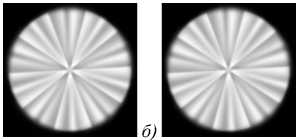
Рис. 4. Дефокусированные изображения слоя m = 2
а)
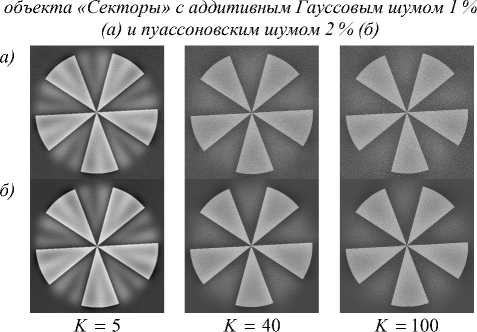
Рис. 5. Зависимость от K ( ц = 0,1 , слой m = 2 ) в случае
Гауссова шума 1 % (а) и пуассоновского шума 2 % (б)
Аналогичные выводы справедливы и для значения параметра ц = 0,01. Однако надо иметь в виду, что при уменьшении параметра ц качество секциониро-
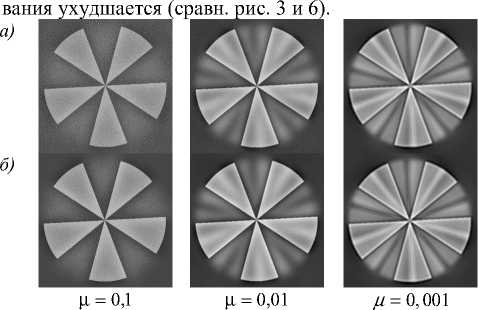
Рис. 6. Зависимость от ц (K = 40 , слой m = 2 ) в случае
Гауссова шума 1 % (а) и пуассоновского шума 2 % (б)
Таким образом, возможности выбора параметра ц для подстройки работы метода к специфике восстанавливаемых изображений и искажений ограничиваются при малых ц эффектом Гиббса, приводящим к ложному оконтуриванию, однако это может быть важно в задаче выделения контуров изображений при априорной информации об однородности изображения между контурами.
-
4. Секционирование изображений глазного дна
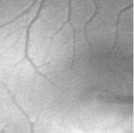
Для работы с изображениями глазного дна рассматривался стек из N =3 секущих плоскостей объекта (см. рис. 7 а ) с глубиной 200 микрон по координате z . Заметим, что, в отличие от объекта «Секторы», в рассматриваемом случае существенно больше полутонов и актуальных для диагностики патологий вы-
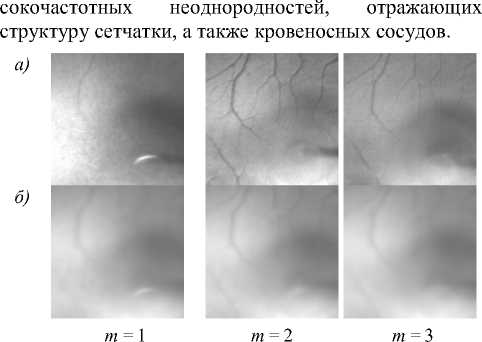
Рис. 7. Исходные изображения глазного дна (а) и стек наблюдаемых изображений без шума (б)
Соответствующие функции дефокуса между плоскостями и аберрации второго порядка имели вид:
Ps (x, y, Xznm) = 0,5n( x2 + y2) | n - m|, p (x, y) = 0,5n( x2 + y2).
В каждой плоскости фокусировки вместо исходных изображений наблюдаются результаты их конво-люции с изображениями соседних плоскостей в сочетании с общими аберрациями второго порядка. Соответствующие изображения, приведённые на рис. 7 б , характеризуются сильным размытием и исчезновением структуры сетчатки.
Для количественной оценки качества восстановления изображений в каждой секущей плоскости фокусировки используется векторный частотный критерий (ВЧК), позволяющий контролировать особенности восстановления в спектральной плоскости и задаваемый функцией
A ( r ) = — m ( r )
∑
( u , v ): r 2 < u 2 + v 2 < ( r + 1)2
F ( E ( D ( 3 )) ) F ( E ( D ( о )) )
( u , v ),
где o~ – восстановленное изображение, сдвинутое в неотрицательную область, o – исходное изображение, D (X) = X/D(X), E (X) = X/E(X), D(•) - дисперсия, E(•) - среднее, m(r) - число точек (u, v), удовлетво- ряющих соотношению r2 ≤ u2+ v2 ≤ (r+1)2. Таким образом, для вычисления ВЧК сравниваемые изображения нормируются на свои средние по апертуре значения и на дисперсию. Далее вычисляются Фурье-образы и находится отношение их модулей. Полученное распреде- ление усредняется по концентрическим кольцам с центром в нуле шириной в несколько пикселей (в наших экспериментах – 2). Составленная из полученных значений результирующая кривая даёт зависимость нормированного отношения спектров от модуля спектральной переменной в относительных единицах и позволяет охарактеризовать результаты восстановления в зависимости от интересующей частотной области.
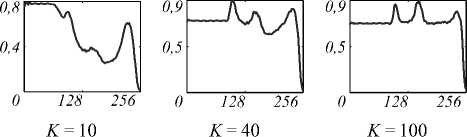
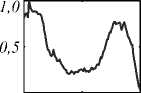
Рис. 8. Результаты секционирования слоя изображений глазного дна и ВЧК в зависимости от K
( ц = 0,1 , слой m = 2 без шума)
Как и в случае объекта «Секторы», при обработке реальных изображений глазного дна без шумов при увеличении количества итераций наблюдается эффект «насыщения»: дополнительные (после 40) итерации уже визуально не заметны (см. рис. 8). Однако применение ВЧК позволило выяснить, что на больших итерациях метод отрабатывает в основном высокочастотные составляющие изображений, приближая ВЧК к равномерному распределению.
При уменьшении параметра ц до значения 0,01 ухудшается качество восстановления высокочастотных составляющих изображения. Увеличение количества итераций (не менее 100) частично исправляет ситуацию, однако неравномерность векторного критерия выше по сравнению с ц = 0,1. В связи с этим дальнейшее уменьшение ц нецелесообразно вследствие ухудшения равномерности ВЧК и появления эффекта Гиббса (см. рис. 9).
ц = 0,1 ц = 0,01 ц = 0,001
Рис. 9. Зависимость от ц (K = 100 , m = 2 , без шума)
Таким образом, для восстановления изображений глазного дна без шума диапазон рабочих значений параметра µ составляет от 0,01 до 0,1 с соответствующим выбором количества итераций K в зависимости от требуемого распределения ВЧК.
Приведём результаты восстановления изображений глазного дна с аддитивным Гауссовым шумом порядка 1 %. В качестве исходных данных имеется стек наблюдаемых зашумлённых дефокусированных изображений, приведённых на рис. 10. Заметим, что в реальной ситуации «очищенное» от соседних слоёв изображение также содержит шумы измерения. Поэтому для контроля качества секционирования используется модифицированный ВЧК, при вычислении которого в моделируемой нами ситуации к искомому изображению в слое добавляется шум такой же природы и величины (но, возможно, другой реализации), что и в наблюдаемом дефокусированном изображении.
m = 1 m = 2 m = 3
Рис. 10. Стек дефокусированных изображений глазного дна с аддитивным Гауссовым шумом 1 %
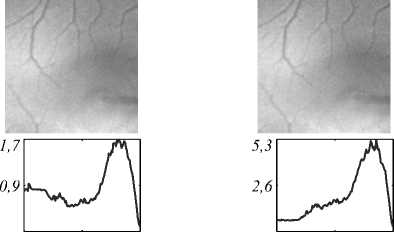
В отличие от тестового объекта «Секторы», содержащего контрастные границы и участки однородного распределения интенсивности, в случае полутоновых изображений глазного дна с шумами для проявления тонких структур (сосуды) и волнистой топологии фона глазного дна, несущей важную офтальмологическую информацию о рецепторах, значение параметра µ =0,1 недостаточно для качественного восстановления, причём увеличение числа итераций лишь ухудшает картину. Улучшение качества восстановления наблюдается при уменьшении параметра до значения µ = 0,01. При этом метод успешно производит «секционирование» смешанных изображений, однако шум остаётся заметным, несмотря на существенное выравнивание векторного критерия (рис. 11).
О 128 256 0 128 256
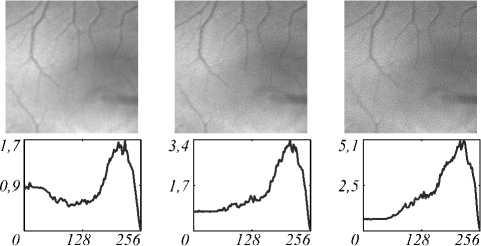
K = 10 K = 40
Рис. 11. Секционирование изображений глазного дна ( µ = 0,01 , слой m =2 ) для Гауссова шума 1 %
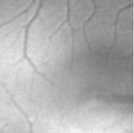
Уменьшение значения параметра до µ = 0,001 (см. рис. 12) даёт наиболее адекватный результат как с точки зрения ВЧК, так и с точки зрения качественных особенностей восстановления. Для 100 итераций на среднем восстановленном изображении хорошо проявились как характерная фоновая текстура глазного дна, так и кровеносные сосуды.
K = 100
О 128 256
K =40
Рис. 12. Секционирование изображений глазного дна ( µ = 0,001 , слой m = 2 ) для Гауссова шума 1 %
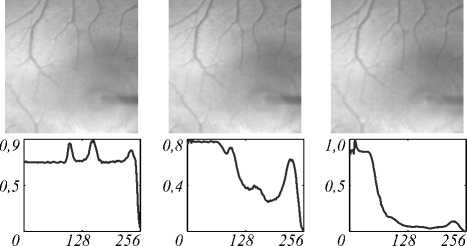
Рассмотрим влияние пуассоновского шума около 2 % (100 000 фотонов на единицу интенсивности пикселя) на наблюдаемые изображения (см. рис. 13).

m =1 m =2 m =3
Рис. 13. Стек дефокусированных изображений глазного дна с пуассоновским шумом 2 %
Приведём результаты работы итерационного метода в зависимости от числа итераций при различных значениях параметра µ = 0,1, 0,01, 0,001.
K = 2 K = 5 K = 10
Рис. 14. Секционирование изображений глазного дна ( µ = 0,1 , слой m = 2 ) для пуассоновского шума 2 %
Из рис. 14 видно, что для достижения приемлемой равномерности распределения векторного критерия при µ =0,1 на низких и средних частотах достаточно ограничиться небольшим количеством итераций (не более 10). Увеличение числа итераций приводит к росту искажений в высокочастотной области и соответствующей деградации изображения.
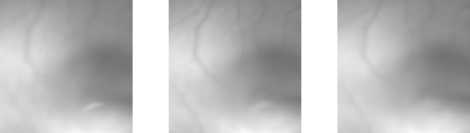
Анализ рис. 15 показывает, что при уменьшении параметра µ до значения 0,01, соответствующего предыдущему случаю, результата удаётся добиться ценой увеличения числа итераций до 20–40. При этом наблюдается равномерность векторного критерия в диапазоне низких и средних частот. Вместе с тем характерная фоновая текстура глазного дна всё ещё остаётся зашумлённой.
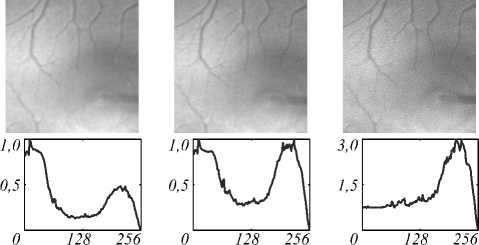
K = 5 K = 10 K = 40
Рис. 15. Секционирование стека изображений глазного дна
( µ = 0,01 , слой m = 2 ) для пуассоновского шума 2 %
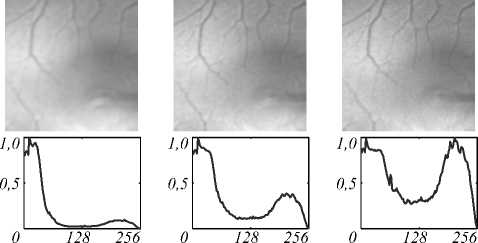
K = 10 K = 40 K = 100
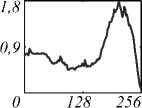
Рис. 16. Секционирование изображений глазного дна (µ = 0,001, слой m = 2) для пуассоновского шума 2 % Уменьшением параметра µ до значения 0,001 с одновременным увеличением числа итераций до 100 (см. рис. 16) удаётся добиться хорошей равномерности векторного критерия вплоть до самых высоких частот с проявлением характерной фоновой текстуры глазного дна.
-
5. О возможности распараллеливания метода
Важной особенностью метода является возможность эффективного распараллеливания вычислительного алгоритма при использовании многоядерной структуры современных CPU и GPU. Об эффективности распараллеливания на многоядерных архитектурах в смысле сильной масштабируемости можно судить по графику ускорения программной реализации алгоритма в зависимости от числа используемых рабочих процессов в вычислительном пуле среды MATLAB (см. рис. 17). Расчёты проводились на персональном компьютере с процессором Intel Core i7-4790K, имеющем 4 процессорных ядра с поддержкой технологии Intel Hyper-Threading, для задачи с размерностью изображений 512×512. Как видно из графика, даже использование стандартных средств распараллеливания, имеющихся в среде MATLAB, позволяет сократить фактическое время расчёта в 4 раза.
Список литературы Об одной задаче численного секционирования в офтальмологии
- Diabetes in America. -2nd ed. -Bethesda, MD: National Institutes of Health, National Institute of Diabetes and Digestive and Kidney Diseases, 1995. -782 p.
- Bursell, S.E. Stereo nonmydriatic digital-video color retinal imaging compared with Early Treatment Diabetic Retinopathy Study seven standard field 35-mm stereo color photos for determining level of diabetic retinopathy/S.E. Bursell, J.D. Cavallerano, A.A. Cavallerano, A.C. Clermont, D. Birkmire-Peters, L.P. Aiello, L.M. Aiello//Ophthalmology. -2001. -Vol. 108(3). -P. 572-585. -ISSN 0161-6420. -DOI: DOI: 10.1016/S0161-6420(00)00604-7
- Buabbud, J. Optical coherence tomography imaging for diabetic retinopathy and macular edema/J. Buabbud, M. Al-latayfeh, J. Sun//Current Diabetes Reports. -2010. -Vol. 10(4). -P. 264-269. -ISSN 1534-4827. -DOI: DOI: 10.1007/s11892-010-0129-z
- Braaf, B. Real-time eye motion correction in phase-resolved OCT angiography with tracking SLO/B. Braaf, K.V. Vienola, C.K. Sheehy, Q. Yang, K.A. Vermeer, P. Tiruveedhula, D.W. Arathorn, A. Roorda, J.F. de Boer//Biomedical Optics Express. -2013. -Vol. 4(1). -P. 51-65. -ISSN 2156-7085. -DOI: DOI: 10.1364/BOE.4.000051
- Larichev, A.V. Adaptive system for eye-fundus imaging/A.V. Larichev, P.V. Ivanov, N.G. Iroshnikov, V.I. Shmalhauzen, L.J. Otten//Quantum Electronics. -2002. -Vol. 32. -P. 902-908. -ISSN 1063-7818.
- Agard, D. Optical sectioning microscopy: cellular architecture in three dimensions/D. Agard//Annual Review of Biophysics Bioengineering. -1984. -Vol. 13. -P. 191-219. -DOI: DOI: 10.1146/annurev.bb.13.060184.001203
- Castleman, K. Digital Image Processing/K. Castleman. -Pearson Education, 2007. -686 p.
- Wu, Q. Microscope image processing./Q. Wu, F. Merchant, K. Castleman. -Academic Press, 2008. -576 p.
- Матвиенко, А.Н. Метод обработки изображений полупрозрачных слоистых сред/А.Н. Матвиенко, Т.Н. Новикова//Вестник Московского университета. Серия 15. Вычислительная математика и кибернетика. -1988. -№ 4. -С. 33-37. -ISSN: 0137-0782.
- Bruce, M. Real-time GPU-based 3D deconvolution/M. Bruce, M. Butte//Optics Express. -2013. -Vol. 21(4). -P. 4766-4773. -ISSN: 1094-4087. -DOI: DOI: 10.1364/OE.21.004766
- Zanella, R. Towards real-time image deconvolution: application to confocal and STED microscopy/R. Zanella, G. Zanghirati, R. Cavicchioli, L. Zanni, P. Boccacci, M. Bertero, G. Vicidomini//Scientific Reports. -2013. -Vol. 3(2523). - DOI: 10.1038/srep02523
- Итеративные методы решения некорректных задач/А.Б. Бакушинский, А.В. Гончарский. -М.: Наука, 1989. -128 с.
- Введение в теорию обратных задач/А.М. Денисов. -М.: Издательство Московского университета, 1994. -208 с.
- Методы решения некорректных задач/А.Н. Тихонов, В.Я. Арсенин. -М.: Наука, 1986. -288 с.
- Ильясова, Н.Ю. Методы цифрового анализа сосудистой системы человека. Обзор литературы/Н.Ю. Ильясова//Компьютерная оптика. -2013. -Т. 37, № 4. -С. 511-535.
- Iroshnikov, N. A modified bispectral image reconstruction method in ophthalmology/N. Iroshnikov, A. Larichev, A. Razgulin, A. Starostin//Computational Mathematics and Modeling. -2015. -Vol. 26(4). -P. 534-545. - DOI: 10.1007/s10598-015-9290-1
- Крылов, А.С. Компьютерный анализ изображений глазного дна/А.С. Крылов, А.В. Насонов, А.С. Семашко, А.А. Черноморец, В.В. Сергеев, В.С. Акопян, А.С. Родин, Н.С. Семенова//СПб.: Труды VIII Российско-Баварской конференции по биомедицинской инженерии, 2012. -С. 129-133.
- Насонова, А.А. Выделение сосудов на изображениях глазного дна и его оценка качества/А.А. Насонова, А.С. Крылов//Биотехносфера. -2014. -Т. 2. -С. 24-25.
