Об одном способе регулирования остаточных напряжений в стеклующихся конструкциях

Автор: Сметанников Олег Юрьевич
Статья в выпуске: 1, 2012 года.
Бесплатный доступ
Решается задача минимизации остаточных перемещений в круглой пластинке из эпоксидной смолы ЭД-20 с помощью дополнительного силового воздействия. Для описания термомеханического поведения материала с релаксационным переходом используется разработанная ранее модель. При численном расчете применяется методика суперпозиции пошаговых решений задач термоупругости, реализованная в конечно-элементном пакете ANSYS. Показано, что снятие ограничений на класс функций управления качественно меняет решение и позволяет существенно снизить уровень регулирующей нагрузки.
Стеклование, численные методы, технологические напряжения, остаточные напряжения, метод конечных элементов, оптимизация
Короткий адрес: https://sciup.org/146211404
IDR: 146211404 | УДК: 539.3:
About one optimization method of the residual stresses in constructions with glass transition
The problem of minimization of the residual displacements in the round epoxy resin ED-20 plate by additional force loading is solved. For the description of thermomechanical behaviour of a material with relaxation transition the model developed earlier is used. The technique of superposition of step-by-step thermoelasticity problems solving, realized in ANSYS program, is used at numerical calculations. It is shown, that absence of restriction to the type of external force function allows to lower considerably a level of operating loading.
Текст научной статьи Об одном способе регулирования остаточных напряжений в стеклующихся конструкциях
Для описания термомеханического поведения стеклующейся среды используется модель упругого приближения, учитывающая эффект «замораживания» деформаций при охлаждении материала и плавность релаксационного перехода, завершенность которого описывается сте- пенью стеклования N . Основные аспекты, связанные с построением и использованием данной модели в прикладных технологических задачах, изложены в работах [1–14]. Методика оптимизации остаточных напряжений в изделиях из стеклующихся полимерных материалов внешним силовым воздействием описана в [15]. Там же для иллюстрации возможностей предложенного алгоритма минимизации остаточных напряжений решена одномерная модельная задача поиска оптимального кинематического воздействия для неравномерно охлаждаемого пакета стеклующихся стержней с двумя видами управляющего воздействия в виде кусочно-линейных функций от времени. В работе [16] модель оптимизации применена для уменьшения остаточного прогиба неравномерно охлаждаемой в воде круглой пластинки. При этом регулирующее давление интерполируется полиномиальной функцией времени.
В данной работе рассматривается пример возможного использования предложенной методики оптимального управления остаточным НДС, в котором, в отличие от [15], [16], на вид функциональной зависимости от времени управляющей нагрузки не накладывается дополнительных ограничений.
Рассматривается процесс неравномерного осесимметричного охлаждения в воде круглой пластинки из эпоксидной смолы ЭД-20 с размерами R = 37,5 мм, H = 6,5 мм (рис. 1). В соответствии с программой эксперимента, описанного в [12], подготовленный образец нагревается до 150-170 ° C (температура, превышающая условную температуру начала стеклования T g 1 , при которой степень стеклования N(T > T g 1 ) = 0 [1]) и затем охлаждается путем погружения в воду нижней поверхности пластины. Результаты опыта [12] свидетельствуют, что как во время, так и по окончании охлаждения в конструкции возникают прогибы порядка 1 мм, обусловленные существенными градиентами температуры по толщине круглой пластинки
Поставим задачу оптимизации остаточного деформированного состояния в следующей формулировке: с помощью переменного во времени силового воздействия равномерно распределенной поверхностной нагрузкой p(t) требуется минимизировать отклонение от плоскостности верхней поверхности образца вида Uz (r) = uz (r, H) - uz (0, H) (см. рис. 1). При этом будем полагать, что взаимным влиянием дополнительного силового воздействия и температурного поля можно пре- небречь (возникающие в конструкции температурные деформации пластины не изменяют значение приложенной нагрузки, а тепловыделение, обусловленное диссипацией энергии дополнительного силового воздействия, пренебрежимо мало).
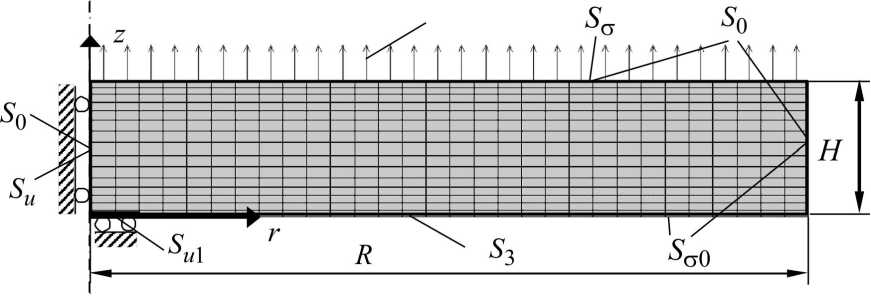
Рис. 1. Расчетная схема задачи
Для описания термомеханического поведения материала образца используем предложенную ранее модель упругого приближения вида [1]
_ N ( t )_
d( t ) = (4 C 1 + 4 C 2 N ( t )) -8 ( t ) - 4 C 2 •• J 8 ( т ) dN ( т ), (1)
где 4 C 2 = 4 C g - 4 6 1 ; 4 Cg , 4 6 1 - тензоры упругих констант материала в стеклообразном и высокоэластичном состояниях соответственно; 8 ( t ) = 8 -8 T ; 8 , 8 T - тензоры полных и температурных деформаций со-
T ( t )
ответственно; еTij = j aj(т)dT(т); aj = аЪц; a - коэффициент темпе-T ратурного расширения; Ъц - символ Кронекера; с>(t) - тензор напря жений; T(t), To - текущая и начальная температуры соответственно; t - время. Связь между степенью стеклования N и температурой T можно описать, например, зависимостью [1]
N ( T , T ) = ^
1 - 0,5exp (^- T p),
- ( T - Tg ( Т )) 0,5exp (— ^— ) ,
T
g ’
где у - параметр, определяющий ширину интервала стеклования, Tg - температура стеклования.
Для определения остаточного напряженно-деформированного состояния конструкции с учетом сделанных допущений требуется последовательно решить две краевых задачи: нестационарной теплопроводности и на ее основе - расчет напряженно-деформированного состояния (НДС).
Нестационарное температурное поле T( x , t ) в области Q определяется из решения задачи теплопроводности:
T(x, t) = a2AT(x, t), xeQ, t e(0, t*],(3)
sup( T (x, t *)) < Tg 2,(4)
x eQ
T (x,0) = To; T (x, t) = Tfin, t > t *,(5)
Xn-grad(T) = h(T(x,t)-Ts(t)), xe S3,(6)
n-grad(T) = 0, xeSo,(7)
где Tg 2 - условная температура конца стеклования ( N ( T > Tg 2) = 1 ).
В работе [15] показано, что для материалов, имеющих физические соотношения вида (1), в силу физической и геометрической линейности задачи расчета НДС можно применить принцип суперпозиции раздельных решений «температурной» и «силовой» задач. Разобьем интервал времени до момента окончательного охлаждения [0, t*] на Nt не обязательно равных подынтервалов. Под «силовой» понимается постановка задачи определения НДС вида div 5c(x,tk) = 0, xeQ,(8)
5s(x,tk) = ((V5u(x,tk))T + V5u(x,tk))/2 ,(9)
5u(x,tk)-n(x) = 0, xeSuUS^,(10)
5a(x,tk)-n(x) = 5p(tk)-n(x), xeSa ; 5 где 5p(tk) = p(tk) - p(tk-1) - приращение величины внешней распределенной нагрузки на k -м шаге по времени; n(x) - вектор внешней нормали. Главными отличительными признаками данной постановки яв- ляется включение внешнего силового воздействия при отсутствии температурных деформаций. «Температурная» краевая задача также решается на каждом временном шаге и предполагает свободное (без регулирующей нагрузки p(t)) охлаждение конструкции: div 86(x,tk) = 0, xeQ, (13) 8e(x, tk) = ((V8u(x, tk)) T + V8u(x, tk ))/2, (14) 8u(x, tk) -n(x) = 0, xeSuU Sul, (15) 8<6(x, tk) -n(x) = 0, xeSaU Sao, (16) 8<6 (tk ) = (4<?1 +4<C2 N (tk ))-86 (tk), (17) - T (tk) а а где 8в = 8е-8eT; 8вT (tk) = J a(T)EdT; E - единичный тензор второ- T (tk -1) го ранга. Остаточные напряжения и перемещения в момент полного остывания t* вычисляются в соответствии с [15] как суперпозиция «силового» и «температурного» решений: u(x, t *)=u P (x, t *)+u T (x, t *), 6(x, t *) = 6 P (x, t *) + <6T (x, t *). При этом в силу линейности задачи каждое из слагаемых в (18) может быть определено как сумма приращений перемещений и напряжений на каждом шаге по времени от соответствующих приращений температуры и давления Nt Nt uP(х,t*)=^8uP(x,tk), 6P(x,t*)= ^86P(xtkh (19) k=1 k=1 Nt Nt uT (x, t*) = У 8uT (x, tk), 6T (x, t*) = ^86T (x, tk ), (8)-(12); k=1 k=1 где 8uP (x, tk), 86P (x, tk) - решение «силовой» задачи 8uT (x, tk), 8<6T (x, tk) - решение «температурной» задачи (13)-(17). С учетом сказанного задача безусловной оптимизации остаточных перемещений модели (8)-(17) управляющим воздействием p(t) формулируется в виде Ф(p(t)) = J [F(uT(x, t*) + uP(x,t*))]2dS ^min , (21) Sc где Sc - поверхность, на которой контролируется плоскостность образца; F(u) - некоторая скалярная функция вектора перемещений. В соответствии с условием задачи для контроля плоскостности образца после охлаждения выбрана осевая компонента вектора перемещений: F (u)=Uz ( r, H). Для конечно-элементной реализации поставленной краевой задачи используется программный комплекс ANSYS. В качестве базового выбран элемент PLANE42 с опцией осевой симметрии. Конечноэлементная сетка представлена на рис. 1. Термомеханические свойства материала взяты из [10]. Теплофизические свойства в соответствии с [17] имеют следующие значения: Х = 0,19 Вт/(м^К), c = 1000 Дж/(кгК), р = 1200 кг/м3. Пространственная дискретизация при конечно-элементных расчетах сводит задачу (21) к решению системы линейных уравнений вида [Cp ]{P} = {Dp } относительно вектора управляющей нагрузки {р} размерностью, равной числу шагов по времени Nt. Матрица [Cp ], как показал анализ, является плохо обусловленной, что характерно для обратных задач, к которым относится рассматриваемая задача [18]. Учитывая (19), получим выражение для остаточных перемещений в результате решения «силовой» задачи NtNt u P (x,1) = Z5u P (x tk ) = £ 5ПP (x tk ) APk, (22) к=1 к=1 где 5йр (x, tk) - решение «силовой» задачи (8)-(12) при единичном приращении внешней нагрузки Apk =1. Тогда задача оптимизации (21) преобразуется к следующей дискретной форме:
