Об оптимизации размещения сети датчиков интернета вещей на пахотных угодьях

Автор: Савин И. Ю., Блохин Ю. И.
Журнал: Бюллетень Почвенного института им. В.В. Докучаева @byulleten-esoil
Рубрика: Статьи
Статья в выпуске: 110, 2022 года.
Бесплатный доступ
Одним из направлений цифровизации в сельском хозяйстве является внедрение технологий интернета вещей. Оно выражается в создании и использовании специализированных датчиков свойств почв и посевов, которые размещаются на полях. Размещение подобных датчиков в пространстве должно позволить охарактеризовать все микронеоднородности параметров плодородия почв на поле. То есть их количество и пространственное размещение должно быть оптимальным, с одной стороны, с точки зрения затрат на их приобретение и эксплуатацию, а с другой стороны, с точки зрения точности интерполяции получаемых с их помощью данных на всю территорию поля. Показано, что использование карт состояния посевов, полученных по спутниковым данным, и выделение по ним рабочих участков (management zones) может приводить к значительным ошибкам при интерполяции результатов мониторинга в отдельных точках на все поле. Предложен подход для оптимизации размещения датчиков, основанный на использовании карт пестроты плодородия почв полей, которые являются результатом доработки, обновления и уточнения традиционно составленных почвенных карт на основе данных дистанционного зондирования высокого или сверхвысокого пространственного разрешения. Возможности использования подхода продемонстрированы на примере тестового поля.
Пространственное варьирование почв, ndvi, мониторинг почв, спутниковый мониторинг посевов, датчики свойств почв и посевов
Короткий адрес: https://sciup.org/143178877
IDR: 143178877 | УДК: 631.4 | DOI: 10.19047/0136-1694-2022-110-22-50
On optimizing the deployment of an internet of things sensor network for soil and crop monitoring on arable plots
One of the main stream of digitalization in agriculture is the introduction of Internet of Things technologies, which is expressed in the creation and use of specialized sensors that are placed in the fields. The placement of such sensors within agricultural plot should make it possible to characterize all the microvariability of soil fertility parameters in the field. That is, their number and spatial location should be optimal, on the one hand, in terms of costs of their acquisition and operation, and, on the other hand, in terms of accuracy of interpolation of data obtained with their help to the entire plot. It has been shown that the use of crop condition maps obtained on the basis of satellite data and the separation based on them of management zones can lead to significant errors in the interpolation of monitoring results, obtained in separate points, on the whole plot. An approach for optimization of sensor placement is proposed based on the use of soil fertility mapping, which is the result of refinement, updating and clarification of traditionally drawn soil maps on the basis of high spatial resolution remote sensing data. The possibilities of using the approach are demonstrated by the example of a test plot in Leningrad region of Russia.
Текст научной статьи Об оптимизации размещения сети датчиков интернета вещей на пахотных угодьях
В последние годы наблюдается активное внедрение цифровых технологий в сельское хозяйство (Иванов и др., 2018) . Оно идет во многих направлениях: в области создания специализированных роботов, автоматизации технологических процессов, создании систем принятия управленческих решений (E-agriculture in action, 2017; Ведомственный проект…, 2019) .
Одним из направлений цифровизации в сельском хозяйстве является внедрение технологий интернета вещей (Internet of Things (IoT)). Оно выражается в создании и использовании специализированных датчиков, которые размещаются на полях, на отдельных сельскохозяйственных растениях и животных. С помощью беспроводных технологий передачи данных полученная информация может передаваться на сервер или облако с целью получения в режиме реального времени информации об их состоянии, которая может оперативно использоваться для принятия управленческих решений, например, для коррекции агротехники возделывания сельскохозяйственных культур (Elijah et al., 2018) .
Одним из направлений использования технологий IoT в земледелии и растениеводстве является создание датчиков, которые собирают различные данные о параметрах почв и посевов в режиме реального времени, представляющих интерес в практике точного земледелия (Viscarra Rossel, Bouma, 2016; Shafi et al., 2019; Maloku et al., 2021) . Чаще всего подобные датчики в точном земледелии устанавливаются непосредственно на сельскохозяйственную технику (Patrício, Rieder, 2018; Morais et al., 2021) . Однако в качестве отдельного направления развивается использование стационарных или полустационарных датчиков, которые размещаются на поле постоянно или меняют свое местоположение каждый сезон (Placidi et al., 2021) .
При размещении IoT системы на поле необходимо достичь его максимального покрытия, при этом развернув минимальное количество сенсорных узлов (СУ) и сохранив надежную радиокоммуникацию между ними. Необходимо применять стратегию размещения СУ на конкретном поле с учетом локальных усло-вий/требований и оптимальные подходы к размещению СУ с учетом пространственной неоднородности параметров почв или растений. Использование большого количества СУ (несколько десятков), распределенных на поле случайным образом или равномерно, приводит к увеличению нагрузки на ретрансляторы СУ, что увеличивает время рабочего цикла и, следовательно, ведет к уменьшению энергоэффективности системы, изменению топологии сети и увеличению стоимости сервисного обслуживания.
Из-за особенностей сельскохозяйственного сектора использование проводных систем для сбора информации практически неосуществимо, поэтому иногда размещают СУ под поверхностью земли, не мешая работе сельскохозяйственной техники.
Размещение подобных датчиков в пространстве должно позволить охарактеризовать все микронеоднородности параметров плодородия почв на поле. То есть количество датчиков и их пространственное размещение должно быть оптимальным, с одной стороны, с точки зрения затрат на их приобретение и эксплуатацию, а с другой стороны, с точки зрения точности интерполяции получаемых с их помощью данных на всю территорию поля (Visalini et al., 2019) .
Существует множество подходов к планированию размещения датчиков, основывающихся на различных методах: многомерное измерение свойств на основе тестовой площадки с использованием максимального проецирования на минимальное одномерное пространство для линейных обратных задач (testbed-based multimetric quality measurement, using maximal projection on the minimum Eigenspace for linear inverse problems), смоделированных как невыпуклая задача и выпуклая релаксация с использованием бокс-ограничений (a nonconvex problem and a convex relaxation using box constraints), и другие (Kaiwartya et al., 2016; Jiang et al., 2016; Manohar et al., 2018) .
Изучались различные подходы к размещению датчиков для приложений точного земледелия (ТЗ), и было замечено, что выбор подхода существенно влияет на общую эффективность (Gupta et al., 2015; Sakai et al., 2015) . Однако установка большого количества датчиков невозможна из-за соображений стоимости и проблем с большими данными. Таким образом, задача оптимального размещения датчиков является ключевой в точном земледелии. Точно так же, как и проблема выбора оптимального датчика для размещения в СУ вызывает значительный интерес.
В литературе изучено множество подходов к разреженному размещению датчиков (sparse sensor placement). Наиболее распространен эвристический подход с использованием комбинаторного поиска методом перебора (Cohen et al., 2006; Naeem et al., 2009; Rebai et al., 2015; Manohar et al., 2018) . Эти методы достаточно хороши для задач среднего масштаба хозяйств.
В исследованиях (Jamali-Rad et al., 2014) размещение датчика на поле моделировалось как линейная обратная задача, и наиболее оптимальное решение было получено с помощью эффективных вычислений (Shamiah et al., 2010; Shen, Varshney, 2014; Chepuri, Leus, 2015) .
В качестве одного из принципов определения мест оптимального размещения датчиков на поле предлагается использовать анализ неоднородностей изображения посевов на поле по данным дистанционного зондирования (ДДЗ) (Prudnikova et al., 2019; Же-лезова, 2020). В качестве показателя неоднородности используют в основном данные об NDVI (Normalized Difference Vegetation In- dex). Считается, что NDVI отражает фактическую неоднородность посевов и зоны постоянно низких или постоянно высоких значений, отражает зоны с разным уровнем плодородия.
С другой стороны, известно, что существует много факторов, которые влияют на величину NDVI. Значения NDVI выходят на плато при густых посевах. Выраженность пространственного варьирования NDVI сильно зависит от типа возделываемой культуры и ее чувствительности к пространственным изменениям почв поля, а также от метеорологических условий сезона вегетации (Савин и др., 2021) . Это все приводит к тому, что при использовании карт NDVI в качестве основы для планирования размещения датчиков на поле возникают неопределенности и ошибки, которые существенно снижают эффективность использования технологий IoT.
В качестве альтернативы предлагается выделение “зон управления” на основе применения электромагнитных датчиков, перемещаемых по полю на автомобиле
(https://cropwatch.unl. edu/documents/On-the-Go%20Vehicle- Based%20Soil%20Sensors%20-%20EC178.pdf) . Разместив датчики в зонах управления, было бы возможно осуществлять мониторинг параметров плодородия всего поля. Но известно, что свойства почв, которые предопределяют сигнал, фиксируемый подобными датчиками, сильно меняются как в пространстве (горизонтальном и вертикальном), так и во времени. Это означает, что для создания подобных карт необходимы дополнительные исследования с учетом сезонной и многолетней динамики состояния посевов.
Теоретически более логичным выглядит размещение датчиков на поле на базе информации о почвах поля, их пространственном “микроварьировании” (варьировании параметров плодородия почв на малых расстояниях). Ведь именно микроварьирование почв на поле предопределяет во многом пестроту их плодородия и пространственную изменчивость состояния посевов на поле. Пространственное варьирование почв во многом контролирует процессы перераспределения и трансформации питательных веществ, энергии и влаги, необходимых для роста растений (Савин, 2016) .
Однако до сих пор детальных исследований связи состояния посевов с пространственным варьированием почв полей недоста- точно, чтобы решить проблему оптимального размещения датчиков параметров плодородия почв на поле. В данной статье приведены результаты исследований в этом направлении.
ОБЪЕКТЫ И МЕТОДЫ
-
2.1. Тестовый участок
-
2.2. IoT-система
Исследования проводились на примере тестового поля Меньковского стационара АФИ (Ленинградская область). Расположение тестового поля показано на рисунке 1.
Поле является достаточно неоднородным с точки зрения выраженности микрорельефа и пространственного варьирования почв. На нем преобладают дерново-слабоподзолистые среднеокультуренные лекгосуглинистые почвы (мощность пахотного слоя – 22 см, содержание гумуса – 2.07%, рН KCl – 5.7; содержание обменного кальция 8.38 мМоль/100 г, магния – 2.88 мМоль/100 г, подвижных соединений фосфора и калия – 565 и 140 мг/кг, аммонийного и нитратного азота 12.37 и 8.21 мг/кг соответственно).
На почвенной карте хозяйства также показаны оглеенные и смытые разновидности почвы в качестве сопутствующих дерновослабоподзолистым. При этом почвенная карта хозяйства не отражает те неоднородности свойств почв, которые могут приводить к неоднородностям посевов сельскохозяйственных культур, а именно: влажность и гидроморфность почв, содержание в них питательных веществ, плотность и оструктуренность почв. Это, впрочем, не является недостатком конкретной почвенной карты хозяйства, а характерно для всех традиционно составленных почвенных карт (Савин, 2016) .
На тестовом поле планируется размещение IoT-системы, которая с помощью аппаратного обеспечения может адаптировать процесс сбора данных широкого спектра датчиков, используемых в полевых условиях, обеспечивая высокую степень детализации и, таким образом, лучше описывая пространственную изменчивость, на которую обычно направлена практика ТЗ, с возможностью использования различных протоколов связи. Система включает ав- томатическую метеостанцию (IoT АМС), координатор беспроводной сенсорной сети (БСС) и сеть СУ.
Рис. 1. Расположение тестового поля (красный значок).
Fig. 1. Test plot location (red circle).
Предложенная конфигурация позволяет скрыто устанавливать узел на поле под поверхностью земли, не опасаясь повреждений от наземной техники и людей. С помощью выдвижной антенны осуществляется связь между узлами и базовой станцией, размещенной над поверхностью земли в удалении от поля, избегая таким образом проблем с радиокоммуникациями в почве.
Мониторинг метеоусловий, температуры и влажности почвы осуществляется через централизованную архитектуру передачи данных БСС, включающую три основных элемента: сенсорные узлы с датчиками, координатор (или шлюз) для сбора и передачи данных, интернет-сервер с базой данных. IoT-система включает СУ, использующие энергоэффективный стандарт передачи данных ZigBee и реализующие топологию типа “mesh” (ячеистая топология) (рис. 2).
Координатор БСС – устройство с интернет-каналом передачи данных для мониторинга метеорологических параметров – оснащен датчиками, обычно используемыми на метеостанциях, измеряющими температуру воздуха и относительную влажность, датчиками солнечной радиации, датчиками скорости и направления ветра, температуры поверхности почвы, фотосинтетически активной радиации (ФАР), количества атмосферных осадков.
Метеоданные передаются каждые 10 минут на сервер (периодичность опроса настраивается) и отображаются на специальном сайте. IoT АМС оснащена солнечной батареей и аккумулятором с высокой разрядной характеристикой и эксплуатационной устойчивостью, обеспечивающими полную автономность системы, а также направленной антенной для усиления сигнала мобильного 4G интернета в диапазоне частот 1 700–2 700 МГц при удалении станции от вышек оператора на 10 км.
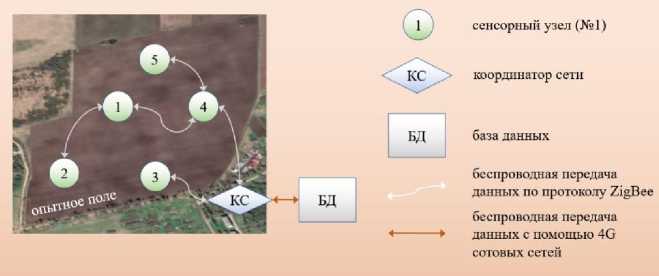
Рис. 2. Архитектура передачи данных в сенсорной сети.
Fig. 2. Data transfer architecture in a sensor network.
Основное преимущество системы заключается в том, что разработанная аппаратная и программная архитектура для регистрации, обработки и хранения данных позволяет подключать другие датчики, используя стандартные беспроводные (ZigBee, LoRa) или проводные интерфейсы (I²C, SDI-12, UART, RS-232 и RS-485) (рис. 3).
Экспериментальный образец сенсорного узла включает: скважинный влагомер почвы (двухканальный для пахотного слоя 0–20 см и/или пятиканальный для слоя 0–100 см), ZigBee-маршрутизатор ETRX357HR-LRS, микроконтроллер ADUC845, аккумулятор Delta DT 1218 и внешнюю антенну (рис. 3). Микроконтроллер ADUC845 при синхронизации от кварцевого резонатора 32.768 кГц достигает максимальной производительности 12.58 MIPS (млн инструкций в секунду), имеет 10 каналов ввода аналоговых сигналов и 24 цифровых входа, что вполне достаточно для работы в роли центрального контроллера СУ. В режиме бездействия между измерениями микроконвертор потребляет не более 20 мкА.
Часы реального времени на базе Maxim DS1307, подключенные к ADUC845 позволяют синхронизировать время выхода из режима покоя, управление реле, сбора и передачи данных СУ в сети.
Аккумулятор Delta DT 1218 емкостью 18 Ач позволяет снабжать СУ электропитанием в течение вегетационного периода без подзарядки, а также подключать к СУ различные датчики и устройства, требующие напряжение питания 12 В. Функционирование датчиков обеспечено стабилизацией напряжения +5В вне зависимости от заряда аккумулятора. ZigBee-модуль ETRX357 имеет выходную мощность 20 дБ, чувствительность -106 дБ и скорость передачи данных до 250 кБ/с. Для установки надежного беспроводного ZigBee соединения между СУ и координатором используется антенна Interline HORIZON (Польша) с диапазоном частот 2.4–2.5 ГГц, поддерживающая все общие стандарты IEEE 802.11 b/g/n, со встроенным пропускающим полосовым фильтром для ограничения помех, создаваемых другими передатчиками. Коэффициент усиления антенны – 7 дБ.
Для обработки и передачи данных координатор оснащен микрокомпьютером Raspberry Pi 3 Model B+ совместно с модулем расширения 2-Channel Isolated RS485 Expansion HAT, обеспечивающим подключение метеодатчиков.


Рис. 3. Структурная схема и блок электроники IoT АМС.
Fig. 3. Block diagram and electronics block of IoT AMS.
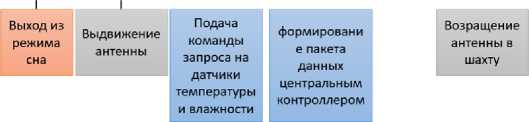
Было предложено множество методик для увеличения времени автономной работы БСС и увеличения энергоэффективности рабочего цикла (Borrero, Zabalo, 2020). Как правило, они заключались в подборе электронных компонентов с низким энергопотреблением и в определении оптимального порядка выполнения рабо- чего цикла и уходе в режим сна (или режим ожидания, или “сон” в кавычках). Для СУ разработан энергоэффективный рабочий цикл, позволяющий производить поочередный сбор и передачу данных (рис. 4).
|
Прием пакета данных с датчиков температуры и влажности |
Поиск оптимальных маршрутов и передача и ретрансляция пакета данных ZigBee-модемом |
Проверка отсутствия осадков
О 5 10 60 65 70 75 120
Уход в режима
Рис. 4. Порядок выполнения работы сенсорных узлов.
Fig. 4. Order of operation of the sensor nodes.
180 Секунды
БСС может работать в различных полевых условиях, с учетом особенностей рельефа конкретного участка местности и погодных условиях. Каждый СУ обладает высокой надежностью и автономностью, а его компоненты характеризуются степенью герметизации, соответствующей индексу защиты IP65.
-
2.3. Анализ спутниковых данных
На первом этапе исследований было проведено уточнение почвенной карты тестово е го поля. В качестве основы была использована традиционно составленная почвенная карта хозяйства в масштабе 1 : 25 000, которая была создана и векторизована специалистами АФИ.
Контурная часть почвенной карты была детализирована на основе визуального анализа изображения открытой поверхности почв поля на спутниковых данных Sentinel-2. В качестве основы использовался синтез, состоящий из 3 каналов Sentinel-2 (1-й, 3-й и 5-й). Для надежности дешифрирования почв использовались изображения открытой поверхности почв поля, полученные в два срока съемки (7 и 24 апреля 2019 г.).
Анализ неоднородностей посевов на тестовом поле проводился также по спутниковым данным Sentinel-2. Были отобраны все безоблачные сцены на тестовое поле, полученные с момента начала эксплуатации спутника (с 2015 г. до августа 2021 г.). Всего было отобрано 35 сцен (по одной – в 2015, 2016 и 2017 гг., 10 сцен – в 2018 г., 7 сцен – в 2019 г., 11 сцен – в 2020 г. и 4 сцены – в 2021 г.).
В 2015 г. на поле возделывалась яровая пшеница, в 2016 г. – картофель, в 2017 г. – яровой ячмень, в 2018 г. – яровая пшеница, в 2019 г. – картофель, в 2020 г. – яровой ячмень и в 2021 г. – яровая пшеница.
Предварительно была проведена атмосферная коррекция всех отобранных изображений с использованием алгоритма Sen2Cor в среде SNAP (https://step.esa.int/main/toolboxes/snap/) .
После этого были вычислены значения NDVI для тестового поля для всех отобранных для анализа сцен. Индекс NDVI использовался в качестве индикатора неоднородностей растительности на тестовом поле, как это делается в системах точного земледелия и во многих исследованиях в области спутникового мониторинга посевов (Atzberger, 2013) .
Сцены NDVI за разные сроки были совмещены с выделами уточненной карты почв. Рассчитывалось среднее значение NDVI для выделов почвенной карты и статистические параметры распределения NDVI в каждом выделе. Далее оценивалась статистическая значимость разницы среднего NDVI в выделах разных почв на поле.
Дополнительно проводился пространственный попарный корреляционный анализ значений NDVI на поле в разные даты съемки.
Анализ данных NDVI проводился с учетом неоднородностей, появляющихся на поле из-за его обработки в момент съемки или его разбивки на разные участки в разные годы. Данные анализировались для однородных по состоянию поля участков (распаханная часть, под сорняками или стерней, под посевами разных культур).
Полученные данные послужили основой для анализа пространственной устойчивости NDVI во времени, а также для оценки связи пространственного варьирования NDVI с почвами.
Анализ изображений Sentinel-2 проводился с использованием SNAP (https://step.esa.int/main/toolboxes/snap/) . Результаты в виде карт NDVI импортировались в пакет прикладных программ ILWIS (https://www.itc.nl/ilwis/) , в котором осуществлялся анализ связей индекса с почвенными выделами и корреляционный анализ.
Для статистического анализа данных использовался пакет программ Statistica v.6.0.
РЕЗУЛЬТАТЫ И ОБСУЖДЕНИЕ
На рисунке 5 представлены результаты уточнения почвенной карты на территорию тестового поля. Полученная карта отличается большей детальностью. Это связано с тем, что на традиционных картах многие небольшие по площади неоднородности почвенного покрова генерализуются (Savin, 2019) . Кроме того, при обновлении почвенной карты авторы опирались на неоднородности изображения открытой поверхности почв на космических снимках высокого разрешения.
Эти неоднородности на территории исследований связаны с гидроморфностью почв, различным содержанием в их пахотном горизонте гумуса и припахиванием нижележащих низкоплодородных почвенных горизонтов (А 2 , В) при небольшой мощности гумусового горизонта, то есть связаны с теми свойствами почв, которые во многом и предопределяют их плодородие.
Почва 1 на рисунке 5 – это разновидности почв с низким плодородием, невысоким содержанием гумуса в пахотном горизонте, с припахиванием нижележащих почвенных горизонтов, с наименьшим гидроморфизмом из всех почв поля. Почва 4 содержит больше всего гумуса в пахотном горизонте, она более плодородна, без припахивания нижележащих горизонтов, но одновременно и более гидроморфна. Почвы 2 и 3 являются промежуточными между почвами 1 и 4 по уровню плодородия и уровню гид-роморфности. Таким образом, по уровню плодородия почвы поля ранжируются в следующий ряд по его возрастанию: почва 4 > почва 3 > почва 2 > почва 1. Одновременно в этом же ряду наблюдается уменьшение степени гидроморфности почв.
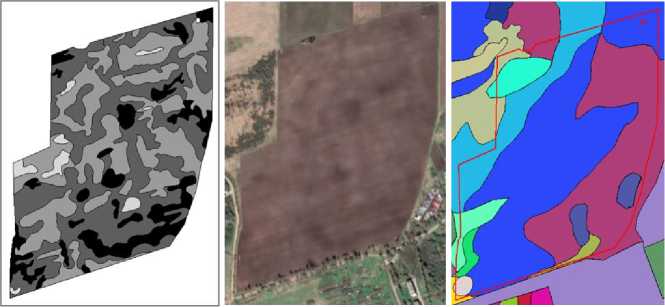
Рис. 5. Неоднородности почв тестового поля (слева) (светло-серый – почва 1, серый – почва 2, темно-серый – почва 3 и черный цвет – почва 4), их изображение на космическом снимке высокого разрешения (в центре) и контурная часть традиционно составленной почвенной карты (справа) (граница тестового поля показана красной линией).
Fig. 5. Soil heterogeneities of the test field (on the left) (light gray colour – soil 1, gray – soil 2, dark gray – soil 3, and black – soil 4), their visualization on the high-resolution satellite image (in the centre) and the contour part of the traditionally drawn soil map (on the right) (the boundary of the test field is shown with a red line).
Карты NDVI тестового поля, рассчитанные для разных сроков съемки, представлены на рисунке 6.
На карты наложены границы уточненной почвенной карты поля (серые линии). Сравнение карт между собой демонстрирует большую вариабельность величины NDVI на тестовом поле. Значения индекса меняются от 0.2–0.3 (для открытой поверхности почв) до 0.8–0.9 (для густых посевов в фазу их максимального развития). Даже карты NDVI, полученные с интервалом в несколько дней, различаются между собой.
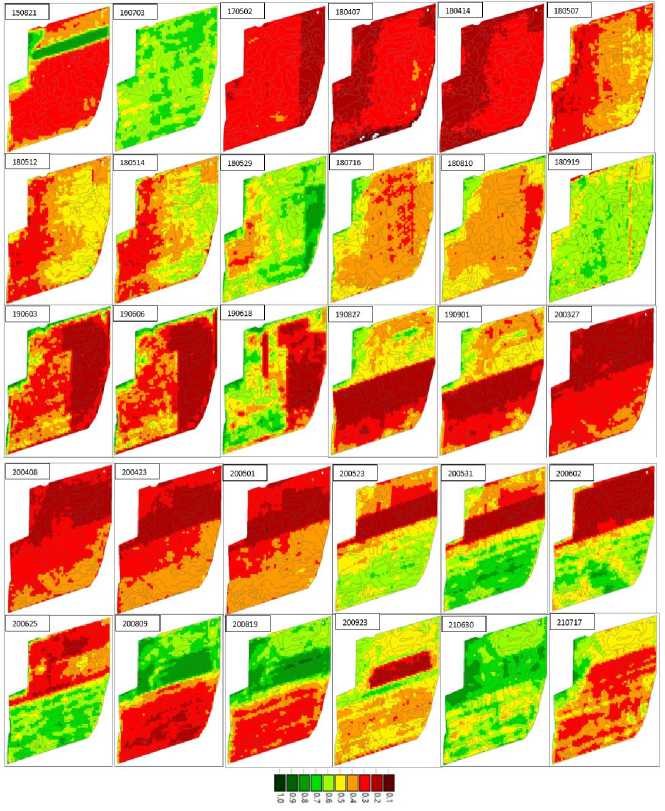
Рис. 6. Изображения NDVI тестового поля, полученных в разные сроки съемки (формат даты YYMMDD).
Fig. 6. NDVI images of the test field obtained at different dates of acquisition (date format YYMMDD).
Чем больше разница во времени между получением спутниковых данных, тем менее похожи соответствующие карты NDVI между собой. Также визуально наблюдаются четкие различия между картами, полученными в разные годы.
На рисунке 7 представлены осредненные для 4 почв тестового поля значения NDVI для всех сроков спутниковой съемки (s1 соответствует почве 1, s2 – почве 2, s3 – почве 3 и s4 – почве 4 поля).
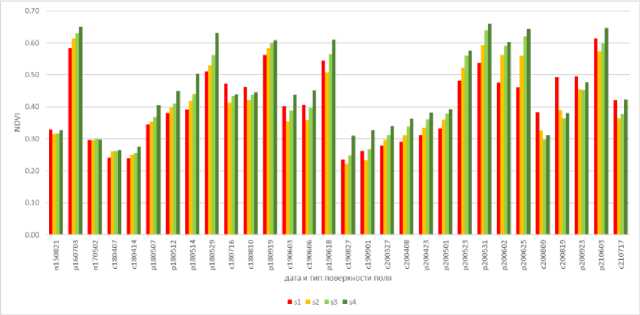
Рис. 7. Осредненные значения NDVI Sentinel-2 для отдельных почв поля за разные сроки съемки (в формате YYMMDD). Первая буква означает состояние поверхности поля; п – открытая поверхность почвы, р – культурная растительность, с – сорная растительность). Обозначение почв приведено в тексте статьи.
Fig. 7. Average values of Sentinel-2 NDVI for individual soils of the field for different survey periods (in YYMMDD format). The first letter indicates the state of the field surface; n – open soil surface, p – crop vegetation, c – weed vegetation). The designation of soils is given in the text of the article.
На наиболее плодородной почве 4 значения NDVI в среднем выше, чем на остальных почвах, и постепенно уменьшаются, достигая минимума на почве 1. Эта закономерность сохраняется для всех сроков съемки, когда на поле были посевы. Но интенсивность уменьшения и абсолютные величины NDVI в каждом случае различаются.
При открытой поверхности почв или в присутствии стерни разница NDVI между почвами статистически недостоверна. А при наличии на поверхности почв сорной растительности вышеописанная закономерность в большинстве случаев изменяется. Постепенное падение значений NDVI от почвы 4 к почве 3 и далее к почве 2 сменяется их ростом для почвы 1. Иногда значения NDVI на почве 1 превышают значения этого индекса на почве 4.
Результаты пространственного корреляционного анализа между картами NDVI тестового поля, построенные для разных сроков съемки, представлены в таблице 1.
Случаи высокой корреляции между картами NDVI разных лет практически отсутствуют (за исключением дат, когда поверхность поля была без растительности). Как правило, достаточно хорошо коррелируют между собой карты NDVI смежных сроков съемки. Присутствие случаев отрицательной корреляции обусловлено частичной обработкой поля в момент съемки.
Уровень корреляции между картами одного года также разный для разных лет. Так, наиболее высокая корреляция отмечается между картами 2020 г., меньше – в 2018 г. и еще меньше – в 2019 г.
Пространственные неоднородности NDVI на тестовом поле оказались гораздо более детальными, чем выделы традиционно составленной почвенной карты. Это подтверждает ранее сделанный вывод о том, что традиционная почвенная карта не отражает всех параметров плодородия почв, а только часть из них (Савин, 2016) .
Поэтому использование обычной почвенной карты в качестве основы для планирования размещения датчиков IoT на поле вряд ли оправданно. Почвенная карта не отражает те неоднородности почвенного покрова, которые важны именно для растениеводства, так как она базируется на классификации почв, в основе которой лежат свойства почв, которые часто не важны для практических целей. Такие же проблемы могут возникнуть и при использовании почвенных карт с отражением структуры почвенного покрова (Фридланд, 1972) .
Таблица 1. Пространственная корреляция между сценами NDVI тестового поля, полученными в разные даты съемки
Table 1. Spatial correlation between NDVI test field scenes acquired on different shooting dates
i
В
a
"5
S
§
160703 0 24
170502 -0.19
180407 -0 39
190603 0 39
190618 0 08
0.42 014
•021 -0.02
031 003
0.01 0.28
018 0.19
0.33 -Oli
0.18 0.39 0.31 0.08 -0 2 8
043 022
04 0.41
0 28 0.33
023 0.17
002 -003
■0.03 0.16
0.02 0.32
-003 0.38
-007 -00G 0.02 0140 36
■0.03 0.15 0 2 0.190 04
0.09 0.35 0.36 029-013
-015 -005 0 07 033
0 33 0 36
035 -0.12
0 08 0.41
0 07 0 26
0.34 031 4Й
0.05 0.1 0.45
0.02 0 08 -0.06
-005 -0.13 -002-0.18
■OOI -0.09 0.13-0.05
005 0.09 0.20.03
0 34 032
-014 -022
0 05 0.1 0 43
0.1 0.35 028
016 019 0,15
002 0016
0.03 0.150.12
0.07 0.29037
0.06 0.28
045 -0.06
026 -017
0.04 -0.13 -0.09
-0.02 0 2 5 0.19
0.14 019021
023 0320.34
0 SJ 0 370 37
0.33 0 420 39
0-11 0.04
026 033
0.26 029
035 018
018 0.25
-019 0.17
0.28 -035
007 021 0.22 027 -Oil 0 07 0.15 0 18 0 22 -0 06 0 03 0,08 0 09 0.16 015 0.09 0 27 0-32 0,36 001 0 09 0 22 0 18 008 0 16
-0-13 0-0.09
022 021025
-0.01 0 050 04
-0,01 -005
0.17 0.19
0 05 0 02
Q09 027
0.07 0.36
0 03 0 07 0 06 0 05 001
0 37028
0 39031
02 033
02 0.23 028
-039 -038 0.05 -0.02
4)09 0.090.06
0.13 020.23
■0.05 0 030 05
01 0.1035
03 0.430.28
015 020 47
ОД5 029 0.28
0.12 0.37 0.38
015 0 04 0.11 0 34
0 39 0 08
4)16 4)11
0.07 021
■006 -0.03
■0.17 4)09
0.03 0.01
021 -0.06 0.01 0.08 -0.07 0.08
0.09 OM 0.11 026 0.3 029 -001 0 03 0 04 0 2 0 25 0.18 -028 0.02 0 -0.16 0.07 -0.06
•0 39 0 03 -0 04
-0 38 -0 02 -0 04
0.17 0.48 0.4
0.32 0 07 0.13
0.0? 0.22 1
0.13 03 0.7
На этих картах предпринимается попытка отразить особенности пространственного микроварьирования почв, но при этом остается проблема базирования на классификации почв и появляется проблема неопределенности пространственной локализации элементарных почвенных ареалов, которые на карте показываются в виде почвенных комбинаций.
С учетом специфики преобладающих на тестовом поле почв (сильное варьирование гидроморфности почв, небольшая исходная мощность гумусового горизонта, наличие участков с припаханными нижележащими горизонтами) более точно отразить пространственные неоднородности почвенного плодородия можно путем коррекции (детализации и уточнения границ) традиционно составленной почвенной карты на основе анализа изображения открытой поверхности пашни по данным дистанционного зондирования. Выявленные выделы не всегда соответствуют классификационным выделам почв, но они более точно отражают пространственное варьирование именно тех свойств почв, которые предопределяют их плодородие.
Это полностью подтвердилось анализом карт NDVI, полученных по данным Sentinel-2 в разные сроки съемки и в разные годы. Полученные данные показывают, что при наличии на поле в момент съемки посевов наблюдается устойчивая закономерность более высоких значений NDVI (большей надземной фитомассы) на наиболее плодородных почвах поля и их более низких значений в ареалах самых низкоплодородных почв. Выраженность этой закономерности варьирует в зависимости от вида возделываемых культур, стадии их развития и, по всей вероятности, от метеорологических условий года. После уборки или перед посевом культуры на поле появляется сорная растительность. Причем в отдельные годы много ее появляется и на самых неплодородных почвах поля, что, вероятно, связано с их более благоприятным режимом увлажнения при общем избытке влаги в почвах поля.
Анализ результатов пространственной корреляции между картами NDVI показывает, что для большинства возделываемых культур схожи друг с другом лишь карты NDVI соседних сроков съемки. Даже для одной культуры в разные фазы развития карты могут быть очень разными, не говоря о картах для разных культур
(рис. 7). Из этого можно заключить, что отдельное изображение NDVI (по одному сроку обследования) не может быть использовано в качестве основы для планирования размещения датчиков IoT. И даже серии изображений не позволяют однозначно выделить зоны с постоянными экстремумами NDVI, как это предлагается делать, например, в некоторых работах (Brummel, Daniel, 2019; Corti et al., 2020) . Прежде всего, это связано с тем, что разные культуры в разных метеоусловиях имеют различную толерантность к изменениям свойств почв и по-разному реагируют в разные фазы развития на пространственные неоднородности почв. Кроме того, на величину NDVI на поле, помимо почвенного плодородия, могут оказывать влияние и многие другие факторы (пространственное распространение сорняков, неоднородности применения удобрений и средств защиты растений в прошлые и в текущий сезоны, особенности и периодичность обработок почвы и посевов, пространственное варьирование заделки семян при севе, спектральный облик поверхности почв и др.) (Савин и др., 2020; Prudnikova et al., 2019) . Это подтверждается и полученными нами данными (см. рис. 7).
Таким образом, по результатам наших исследований можно сделать вывод о том, что ни традиционно составленная почвенная карта, ни карта NDVI и их временные серии не являются надежным источником данных о пространственном варьировании агрономически важных свойств почв на тестовом поле и не могут быть использованы в качестве основы для планирования размещения датчиков IoT. В качестве альтернативы представляется возможным использовать для этой цели карты пестроты плодородия почв поля, уточненные по данным дистанционного зондирования высокого разрешения. Так, например, на тестовом поле представляется оптимальным размещение нескольких датчиков (минимум 1) на самых плодородных участках поля и на самых низкоплодородных почвах. Пример подобного размещения показан на рисунке 8, где запланировано размещение датчиков в 3-кратной повторности.
В результате подобного размещения информация с датчиков может быть достаточно просто интерполирована на все поле.
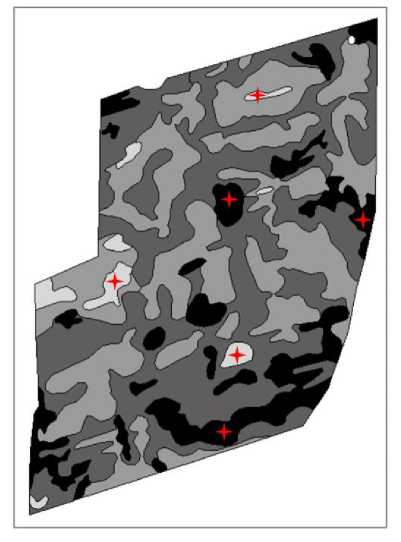
Рис. 8. Предлагаемая схема размещения датчиков IoT на тестовом поле (красные звездочки).
Fig. 8. Proposed layout of IoT sensors on the test field (red asterisks).
Подобные подходы могут быть использованы на любом поле. Но методы обновления и уточнения почвенной карты под эти цели должны быть предварительно адаптированы, так как их специфика зависит во многом от структуры почвенного покрова поля, региона его расположения, метеоусловий, набора возделываемых культур и агротехники их возделывания.
ВЫВОДЫ
Традиционно составленная почвенная карта не может являться основой для планирования размещения на поле датчиков IoT.
Отдельные сцены NDVI, полученные по данным дистанционного зондирования, а также их наборы, полученные в разные сроки и даже в разные годы, также не могут быть использованы в качестве надежной основы для планирования размещения на поле датчиков IoT.
Оптимальным выглядят подходы, основанные на картах пестроты плодородия почв полей, являющихся результатом доработки, обновления и уточнения традиционно составленных почвенных карт на основе данных дистанционного зондирования высокого или сверхвысокого разрешения.
Но эффективность этого подхода может варьировать в связи со спецификой почвенного покрова поля, региона его расположения, метеоусловий, набора возделываемых культур и агротехники их возделывания.
11 (3). P. 232–242. DOI: 10.1556/1848.2020.00086.
34(6), pp. 4–15, DOI: 10.1109/maes.2019.2921177.
Список литературы Об оптимизации размещения сети датчиков интернета вещей на пахотных угодьях
- Ведомственный проект “Цифровое сельское хозяйство”: официальное издание. М.: ФГБНУ “Росинформагротех”, 2019. 48 с.
- Железова С.В. Научно-методическое обоснование технологий точного и ресурсосберегающего земледелия для зерновых культур в Нечерноземной зоне РФ: Дис. … докт. с.-х. наук. М.: РГАУ-МСХА имени К.А. Тимирязева, 2020. 415 с.
- Иванов А.Л., Козубенко И.С., Савин И.Ю., Кирюшин В.И. Цифровое земледелие // Вестник российской сельскохозяйственной науки. 2018. № 5. С. 4-9.
- Савин И.Ю. Классификация почв и земледелие // Бюллетень Почвенного института им. В.В. Докучаева. 2016. Вып. 84. С. 3-9. https://doi.org/10.19047/0136-1694-2016-84-3-9.
- Савин И.Ю., Савенкова Е.В., Кучер Д.Е., Тутукова Д.А., Бербеков С.А. Оценка контрастности почвенного покрова пахотных угодий по спутниковым данным Sentinel-2 // Почвоведение. 2021. № 11. С. 1295-1305.
- Савин И.Ю., Шишконакова Е.А., Прудникова Е.Ю., Виндекер Г.В., Грубина П.Г., Шарычев Д.В., Щепотьев В.Н., Вернюк Ю.И., Жоголев А.В. О влиянии засоренности посевов озимой пшеницы на их спектральную отражательную способность // Сельскохозяйственная биология. 2020. Т. 55. № 1. С. 53-65.
- Фридланд В.М. Структура почвенного покрова. М.: Мысль, 1972. 424 с.
- Atzberger C. Advances in remote sensing of agriculture: Context description, Existing operational monitoring systems and Major information needs // Remote Sensing. 2013. Vol. 5(2). P. 949-981. https://doi.org/10.3390/rs5020949.
- Borrero J.D., Zabalo A. An autonomous wireless device for real-time monitoring of water needs // Sensors (Switzerland). 2020. Vol. 20(7). 2078.
- Brummel D. Delineation of NDVI-based soil management zones: Applications of UAS technology // Graduate Theses and Dissertations. 2019. 16977. URL: https://lib.dr.iastate.edu/etd/16977.
- Chepuri S.P., Leus G. Continuous sensor placement // IEEE Signal Process. Lett. 2015. Vol. 22. No. 5. P. 544-548.
- Cohen K., Seigel S., McLaughlin T. A heuristic approach to effective sensor placement for modelling a cylindrical wake // Comput. Fluids. 2006. Vol. 35. No. 1. P. 103-120.
- Corti M., Marino Gallina P., Cavalli D., Ortuani B., Cabassi G., Cola G., Vigoni A., Degano L., Bregaglio S. Evaluation of In-Season Management Zones from High-Resolution Soil and Plant Sensors // Agronomy. 2020. Vol. 10. 1124. https://doi.org/10.3390/agronomy10081124.
- E-agriculture in action, Bangkok: FAO-ITU, 2017. 118 p.
- Elijah O., Rahman T.A., Orikumhi I., Leow C.Y., Hindia M.N. An Overview of Internet of Things (IoT) and Data Analytics in Agriculture: Benefits and Challenges // IEEE Internet of Things Journal. 2018. Vol. 5. No. 5. P. 3758-3773. https://doi.org/10.1109/JIOT.2018.2844296.
- Gupta H.P., Tyagi P.K., Singh M.P. Regular node deployment for coverage in connected wireless networks // IEEE Sensors Journal. 2015. Vol. 15. No. 12. P. 7126-7134.
- ILWIS. Программный продукт. URL: https://www.itc.nl/ilwis.
- Jamali-Rad H., Seimonetto A., Leus G. Sparsity-aware sensor selection: Centralized and distributed algorithms // IEEE Signal Process. Lett. 2014. Vol. 21. No. 2. P. 217-220.
- Jiang C., Soh Y.C., Li H. Sensor placement by maximal projection on minimum eigenspace for linear inverse problems // IEEE Trans. Signal Process. 2016. Vol. 64. No. 21. P. 5595-5610.
- Kaiwartya O., Abdullah A., Cao Y., Rao R.S., Kumar S., Lobiyal D.K., Isnin I.F., Liu X., Shah R.R. T-MQM: Testbed Based Multi-Metric Quality Measurement of Sensor Deployment for Precision Agriculture-A Case Study // IEEE Sensors Journal. 2016. Vol. 16 (23). P. 8649-8664. https://doi.org/10.1109/jsen.2016.2614748.
- Maloku D., Balogh P., Bai A., Gabnai Z., Lengyel P. Trends in scientific research on precision farming in agriculture using science mapping method // International Review of Applied Sciences and Engineering IRASE. 2020. Vol. 11 (3). P. 232-242. https://doi.org/10.1556/1848.2020.00086.
- Manohar K., Brunton B.N., Kutz J.N., Brunton S.L. Data-driven sparse sensor placement for reconstruction // IEEE Control Syst. Mag. 2018. Vol. 38. No. 3. P. 63-86.
- Morais R., Mendes J., Silva R., Silva N., Sousa J., Peres E.A. Versatile, Low-Power and Low-Cost IoT Device for Field Data Gathering in Precision Agriculture Practices // Agriculture. 2021. Vol. 11. 619.
- Naeem M., Xue S., Lee D. Cross-entropy optimization for sensor selection problems // Proc. 9th Int. Symp. Commun. Inf. Technol. 2009. P. 396-401.
- Patrício D.I., Rieder R. Computer vision and artificial intelligence in precision agriculture for grain crops: A systematic re-view // Comput. Electron. Agric. 2018. Vol. 153. P. 69-81.
- Placidi P., Morbidelli R., Fortunati D., Papini N., Gobbi F., Scorzoni A. Monitoring Soil and Ambient Parameters in the IoT Precision Agriculture Scenario: An Original Modeling Approach Dedicated to Low-Cost Soil Water Content Sensors // Sensors. 2021. Vol. 21. 5110. https://doi.org/10.3390/s21155110.
- Prudnikova E., Savin I., Vindeker G., Grubina P., Shishkonakova E., Sharychev D. Influence of Soil Background on Spectral Reflectance of Winter Wheat Crop Canopy // Remote Sens. 2019. Vol. 11. 1932. https://doi.org/10.3390/rs11161932.
- Rebai M., Snoussi H., Hnaien F., Khoukhi L. Sensor deployment optimization methods to achieve both coverage and connectivity in wireless sensor networks // Comput. Oper. Res. 2015. Vol. 59. P. 11-21.
- Sakai K., Sun M.T., Ku W.S., Lai T.H., Vasilakos A.V. A framework for the optimal k-coverage deployment patterns of wireless sensors // IEEE Sensors J. 2015. Vol. 15. No. 12. P. 7273-7283.
- Savin I.Yu. The scale problem in modern soil mapping // Dokuchaev Soil Bulletin. 2019. Vol. 97. P. 5-20. https://doi.org/10.19047/0136-1694-2019-97-5-20.
- Shafi U., Mumtaz R., García-Nieto J., Hassan S.A., Zaidi S.A.R., Iqbal N. Precision Agriculture Techniques and Practices: From Considerations to Applications // Sensors. 2019. Vol. 19. 3796.
- Shamiah M., Banarjee S., Vikalo H. Greedy sensor selection: Leveraging submodularity // Proc. 49th IEEE Conf. Decis. Control. 2010. P. 2572-2577.
- Shen X., Varshney P.K. Sensor selection based on generalized information gain for target tracking in large sensor networks // IEEE Trans. Signal Process. 2014. Vol. 62. No. 2. P. 363-375.
- STEP. Программный продукт. URL: https://step.esa.int/main/toolboxes/snap.
- University of Nebraska information letter. URL: https://cropwatch.unl.edu/documents/On-the-Go Vehicle-Based Soil Sensors - EC178.pdf.
- Visalini K., Subathra B., Srinivasan S., Palmieri G., Bekiroglu K., Thiyaku S. Sensor Placement Algorithm with Range Constraints for Precision Agriculture // IEEE Aerospace and Electronic Systems Magazine. 2019. Vol. 34(6). P. 4-15. https://doi.org/10.1109/maes.2019.2921177.
- Viscarra Rossel R.A., Bouma J. Soil sensing: A new paradigm for agriculture // Agricultural Systems. 2016. Vol. 148. P. 71-74. https://doi.org/10.1016/j.agsy.2016.07.001.
