Обеспечение инвариантности к возмущающим воздействиям в рельсовых линиях

Автор: Тарасов Евгений Михайлович, Железнов Дмитрий Валерианович, Васин Николай Николаевич, Тарасова Анна Евгеньевна
Журнал: Инженерные технологии и системы @vestnik-mrsu
Рубрика: Информационные системы
Статья в выпуске: 2, 2019 года.
Бесплатный доступ
Введение. Системы интервального регулирования движения поездов эксплуатируются в условиях воздействия значительных индустриальных помех, помех от электротока тягового подвижного состава и изменений климатических условий в широких пределах, приводящих к колебаниям параметров элементов схем, что становится причиной появления внутренних возмущений. Колебания в широком диапазоне проводимости изоляции рельсовых линий относятся к основным внешним возмущениям, приводящим к изменению в большом диапазоне информативного параметра - напряжения на выходе рельсовых линий. В настоящее время известно множество способов и методов подавления возмущений, позволяющих, не ухудшая качество классификации, корректировать колебания информативного сигнала. В статье решается задача обеспечения нечувствительности выходного информативного сигнала к воздействию возмущения принципами координатной компенсации с корректирующим звеном. Материалы и методы. Для решения поставленной задачи в статье рассмотрены различные методологии компенсации возмущений; в качестве основного принят метод координатной компенсации возмущений на входе четырехполюсника рельсовых линий. Для этого определено уравнение передаточной функции корректирующего звена, предполагающее косвенное измерение входного сопротивления рельсовых линий, являющегося функцией проводимости изоляции. Результаты исследования. В статье приведены результаты исследования инвариантных возможностей, которыми обладает предложенный принцип компенсации возмущений. Показано, что при компенсации возмущений корректирующим звеном, включенным на входе четырехполюсника рельсовых линий, возможно существенное уменьшение диапазона изменения выходного информативного сигнала в каждом из классов, т. е. классы становятся более компактными, а качество классификации оказывается в 5 раз выше, чем при отсутствии компенсации возмущений. Обсуждение и заключение. Результаты, полученные в ходе исследования, подтверждают эффективность предложенного способа координатной компенсации возмущений в рельсовых линиях с разомкнутой схемой замещения в условиях отсутствия возможности организации обратной связи, переменной схемы замещения в каждом из классов состояний и невозможности создания дополнительного физического канала передачи возмущения. Использование предложенного метода при построении современных классификаторов позволит существенно повысить устойчивость функционирования систем управления движением поездов, а также исключить ошибки первого рода, приводящие к непроизводительным простоям поездом, и ошибки второго рода, приводящие к авариям и крушениям.
Инвариантность, рельсовая линия, корректирующее звено, моделирование, обратная связь, компенсация возмущений
Короткий адрес: https://sciup.org/147220612
IDR: 147220612 | УДК: 656.259.12 | DOI: 10.15507/2658-4123.029.201902.152-168
Providing invariance to disturbing effects in rail lines
Introduction. The time interval systems for controlling train movement operated under the influence of significant industrial disturbances, interference from the electric current of traction rolling stocks, and significant climate changes that result in fluctuations of parameters of circuit elements. These factors lead to the appearance of internal disturbances. The fluctuations in a wide range of the conductivity of rail lines insulation are the main external disturbances leading to considerable changes of the informative parameter, the voltage at the output end of the rail line. At present, there are many methods for suppressing disturbances, which allow correcting fluctuations in the informative signal without deteriorating the quality of classification. The article deals with the problem of providing insensitivity of the output informative signal to the influence of disturbance by principles of coordinate compensation with a correcting link. Materials and Methods. To solve the problem, various methodologies of compensation for disturbances are considered in the paper; the method of coordinate compensation for disturbances at the input of a quadripole of rail lines is adopted as the main one. The equation of the transfer function of the correcting link is determined, assuming an indirect measurement of the input resistance of the rail line, which is a function of the conductivity of the insulation. Results. The article presents the results of the research of the invariant capabilities of the disturbance compensation principle. It is shown that disturbances compensation with a corrective link included at the input of a quadripole allows one to significantly reduce the dynamic range of the output informative signal change in each of the classes, i.e. classes have become more compact, and the quality of classification has become 5 times higher than in the absence of compensation of disturbances. Discussion and Conclusion. The results confirm the effectiveness of the proposed method for the coordinate compensation of disturbances in rail lines with an open circuit in the absence of the possibility for organizing feedback, a variable circuit in each of the classes of states, and the impossibility of creating a physical additional channel for the transmission of the disturbance. Using the proposed method in the construction of modern classifiers will significantly improve the stability of the functioning of train control systems; eliminate errors of the first kind, leading to unproductive idle train, and errors of the second kind, leading to accidents and crashes.
Текст научной статьи Обеспечение инвариантности к возмущающим воздействиям в рельсовых линиях
Информационной основой систем интервального регулирования движения поездов являются электрические рельсовые цепи (РЦ), входящие в состав классификаторов состояний рельсовых линий (РЛ). РЦ, являясь первичным датчиком информации о свободном, занятом и неисправном состояниях РЛ, создают информационную основу классификаторов. Поскольку РЦ функционируют в тяжелых индустриальных условиях, на них воздействуют значительные возмущения. По своему функциональному назначению классификаторы состояний при автоматизированном управлении движением поездов выполняют ответственную функцию: обеспечение безопасности движения поездов. Следовательно, к ним предъявляются высокие требования по безотказности и относительной устойчивости к внутренним и внешним воздействиям1.
В подавляющем большинстве практических случаев построение систем автоматического управления не может быть осуществлено без учета влияния внешних воздействий2.
К внешним (по отношению к внутреннему контуру системы автоматического управления) воздействиям относятся:
-
1) сигналы задания х ( t ) (задающие воздействия, сигналы опроса РЛ), определяющие желаемый характер изменения регулируемых переменных;
-
2) сигналы возмущения [1] ξ ( t ) (возмущающие воздействия, внешние возмущения), характеризующие влияние на объ-
- ект управления внешней среды и, как правило, препятствующие достижению заданной цели управления. Сигналы задания и сигналы возмущения принципиально различны по их доступности прямым измерениям. На практике, как правило, внешние возмущения недоступны прямым измерениям и, кроме того, заранее известны только с точностью до определенной степени воздействия по статистическим характеристикам. Входные сигналы не только доступны прямым измерениям, но и часто генерируются специальными источниками питания.
К датчикам первичной информации о состоянии РЛ как нижнего уровня автоматического управления предъявляются высокие требования по обеспечению безошибочной классификации состояний: необходима достоверная классификация класса нормального режима при свободном и исправном состоянии РЛ, т. е. уровень напряжения на входе классификатора должен быть больше некоторого заранее определенного порога. В классе шунтового режима, при занятии поездом РЛ и исправном их состоянии, значение напряжения должно быть ниже заранее определенного порога (меньшего, чем в классе нормального режима). В классе контрольного режима, при свободных РЛ, но лопнувшем рельсе, напряжение должно быть также ниже порогового значения напряжения нормального режима.
Возмущающие воздействия оказывают большое влияние на выходной сигнал опроса РЛ [2] и приводят к пересечению классов состояний, поэтому с целью исключения влияния возмущений и повышения достоверности классификации необходимо разработать новый способ их компенсации принципами инвариантности в рельсовых линиях. Это усложняет выбор структуры устройства инвариантного контроля состояний РЛ, на которую влияют физические пределы и особенности3:
-
- достоверное распознавание состояний всех классов;
– необходимость раздельного распознавания трех основных классов состояний: свободного, занятого и контроля обрыва РЛ при воздействии значительных возмущений;
-
- невозможность создания физической обратной связи между концами РЛ участка контроля;
– индивидуальная схема замещения в каждом из режимов;
-
- использование РЛ как единственного канала телемеханической передачи информации от начала к концу РЛ;
– невозможность создания другого канала для компенсации возмущений.
С учетом ограничений к возмущающим воздействиям инвариантное устройство, позволяющее раздельно классифицировать классы свободного, занятого и неисправного состояний, представляет собой классификатор, реализованный на основе существующей РЦ. Она используется в качестве первичного датчика и дополнительных устройств, косвенно измеряющих воздействующие на РЛ возмущения и формирующих алгоритм функционирования.
Обзор литературы
Вопросу компенсации возмущающих внешних воздействий и обеспечению инвариантности выходного сигнала посвящено множество исследований. Основоположниками теории инвариантности в России являются Г. В. Щипанов, Н. Н. Лузин, П. И. Кузнецов, Б. Н. Петров, В. С. Кулебакин, А. Ю. Ишлинский и другие ученые.
Проблемы достижения инвариантности рассматриваются детализировано в различных предметных областях. При этом обособленно рассматриваются пути достижения инвариантности к влиянию возмущающих факторов; методы изучения характеристик многопараметрических систем с распределенными параметрами (пример РЛ) или сосредоточенными параметрами [3]; способы отстройки от различных погрешностей и неточностей, препятствующих достижению желаемой характеристики выходного сигнала [4]. Также раздельно рассматриваются методики достижения квазиинвариантности до ε , при которой достигается локальный максимум инвариантности.
Проблему обеспечения инвариантности к возмущениям произвольного характера рассмотрел Г. А. Щипанов, показавший результативность данного подхода [5]. Далее теория инвариантности развита для достижения двухканальной инвариантности как обеспечение нечувствительности и к изменениям параметров объекта, и к внешним воз-мущениям4. В процессе решения задачи инвариантности к внешним возмущающим воздействиям возникли новые направления, такие как инвариантные системы с самонастройкой и инвариантные системы с предельной точностью до ε [6; 7]. В основном использование принципа инвариантности предполагает дополнительное прямое или косвенное измерение наиболее сильно влияющего возмущающего воздействия, относительно которого достигается качество регулирования. Показано [8], что компенсация влияния возмущения на регулируемую величину возможна посредством введения в схему вспомогательного корректирующего сигнала на вход звена коррекции с выхода компенсирующего устройства соответствующей структуры.
Если рассматривать задачу компенсации внешних воздействий мультиси-нусоидального характера, то она превращается в классическую проблему современной теории управления5 [9]. Здесь основным подходом является использование концепции внутренней модели системы6 [10], которая в дальнейшем расширена для компенсации неопределенного параметрического возмущающего воздействия7 [11–13]. Однако характер изменения и тренд возмущающего воздействия - изменения проводимости изоляции РЛ – неизвестен, и это является ограничением на применение рассмотренных принципов компенсации возмущений.
Еще одним способом компенсации возмущений является применение сильной обратной связи8 [14] и управление с обратной связью. Для этого формируется структура модели с обратной связью, и по ней создается модель с переменными параметрами9. При этом параметры модели непрерывно перестра- иваются в процессе поступления новых данных об изменениях объекта. По новой скорректированной модели воздействия определяются и передаются на объект управления. Несмотря на привлекательность, такие методы затруднительно применять к компенсации возмущений в РЛ с распределенными параметрами, т. к. невозможно организовать обратную связь из-за значительной протяженности участков контроля, достигающих 2,0–2,5 км.
А. А. Пыркиным, А. А. Бобцовым и С. А. Колюбиным [15] описан подход, использующий способ комбинированного управления с прямыми связями по оценке управляющего воздействия, но колебание его качества компенсации при наличии ограничений на управляющее воздействие является существенным недостатком. А. Р. Гайдук [16] для решения задачи полной компенсации внешних возмущений на ошибку выходного сигнала системы предложил использовать свойство селективной инвариантности и принцип управления по выходу и возмущениям. Другие авторы [17] предложили три различных варианта компенсации возмущающего внешнего воздействия при условии наличия запаздывания по управлению. Сначала рассмотрена линейная система компенсации возмущающего внешнего воздействия на состояния объекта управления. Далее описаны синтез системы управления для систем с нелинейностью особого вида и последняя задача для двухканальной системы со связями, перекрестными по выходу. Предложенный авторами принцип обобщается на случай несогласованности входов
Vol. 29, no. 2. 2019 управления и возмущения. Однако распределенность объекта контроля и отсутствие обратной связи, а также требование известности всех параметров объекта контроля ограничивают применение оригинальных подходов при компенсации возмущений в РЛ.
Для повышения достоверности классификации состояний рельсовых линий в условиях влияния значительных возмущающих воздействий необходимо, кроме применения организационно-технических мероприятий по совершенствованию алгоритмов функционирования, синтезировать классификаторы с инвариантными свойствами, построенными по принципу многоканальности, или, что проще в реализации, с использованием концепций построения систем с координатной компенсацией возмущений. Для построения таких систем необходимо измерять сами возмущения или косвенные признаки воздействия возмущений. Перспективными направлениями повышения устойчивости работы классификаторов являются методы обработки входного и выходного сигналов с использованием принципа инвариантности, построенного на распознавании образов с методом группового учета аргументов, и обеспечение инвариантности многоканальным подходом10 [18; 19].
Однако данные принципы не нашли широкого применения при синтезе классификаторов состояний РЛ, инвариантных к возмущающим факторам в рельсовых линиях. Невозможно выполнить требования по обратной связи, по созданию дополнительных физических каналов для реализации принципа многока-нальности, по исследованию характера и закона изменения внешних воздейст- вий для программной компенсации возмущений и т. д. Поэтому привлекателен подход, предполагающий координатную компенсацию возмущений.
Материалы и методы
Вопрос об осуществлении инвариантности классификатора состояний рельсовой линии с координатной компенсацией возмущений по первой форме инвариантности, представленный П. И. Чи-наевым для автоматизированных систем управления11, рассмотрим при наличии возмущающего воздействия g ( t ) на РЛ (рис. 1).
Для обеспечения инвариантности по отношению к g ( t ) введем корректирующее звено Wkg , преобразующее возмущение g ( t ) в компенсирующий сигнал Zk .
Уравнение выходного сигнала системы u2 ( t ) как входного информативного признака классификатора [20], выраженное оператором дифференцирования D = d/dt , в соответствии с рис. 1 имеет вид:
u 2 ( t ) = W p 2 ( D ) W o2 ( D ) *
x[ W 0 g (D) - W kg ( D ) W 01 ( D )} g ( t ) +
+ W p 1 ( D ) W 01 ( D ) W 02 ( D ) W p 2 ( D ) u i ( t ) . (1)
Уравнение (1) состоит из двух частей: одна составляющая описывает тракт передачи полезного информативного сигнала, другая – воздействие возмущения:
u 2 ( t ) = W g ( D ) • g ( t ) + W u 1 ( D ) • U 1 ( t ) . (2)
Составляющая воздействия возмущения g ( t ) на выходной сигнал u 2( t ) имеет вид:
g(0
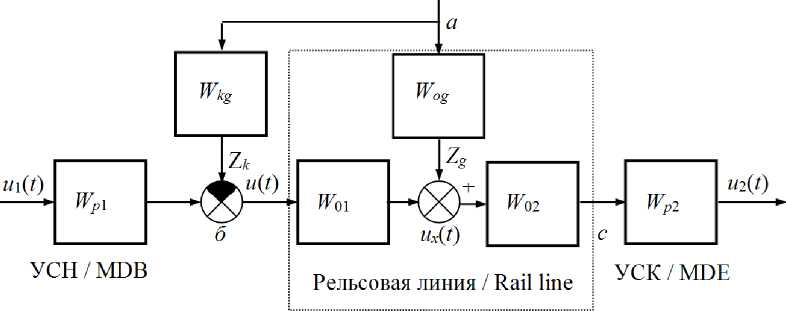
Р и с. 1. Структурная схема тракта передачи информации с корректирующим звеном: УСН – устройство согласования источника питания с началом РЛ; УСК – устройство согласования РЛ с нагрузкой в конце РЛ; W 01 – коэффициент передачи четырехполюсника РЛ от питающего конца до координаты возмущения g ( t ); W 02 – коэффициент передачи четырехполюсника РЛ от координаты возмущения g ( t ) до релейного конца;
Wkg , Wp 1, Wp 2 – коэффициенты передачи компаундирующего звена и элементов устройств согласования в начале и в конце РЛ
F i g. 1. The structural scheme of the information transmission path with the correcting link: MDB – matching device of a power supply with the beginning of a rail line; MDE – matching device of a rail line with a load at the end of the rail line; W01 – transfer coefficient of the quadripole of the rail line the feeding end to the disturbance coordinate g(t); W02 – transfer coefficient of the quadripole of the rail line from the disturbance coordinate g(t) to the end of the rail line; Wkg, Wp1,Wp2 – transfer coefficients of the compounding link and elements of matching devices at the beginning and end of the rail line а передаточная функция информационного тракта описывается выражением:
X W 02 ( D ) ■ W p 2 ( D ) .
Замена оператора дифференцирования комплексной величиной, проведенная ранее, превращает операторы Wg ( D ) и Wul ( D ) в передаточные функции входного сигнала u1 (t) и возмущения g ( t ) со-ответственно12 [21].
Для обеспечения инвариантности выходного сигнала u2(t) к возмущающему воздействию g(t) необходимо обес- печить равенство выходного сигнала выражения (2) нулю при нулевых начальных условиях:
u 2( t ) = 0 при x (0) = 0 и u 2( t ) = 0.
Это условие может выполняться при тождественном равенстве нулю передаточной функции возмущения:
W og ( D ) = 0. (4)
Рассмотрим пути реализации (4), а для этого произведем в (3) замену оператора дифференцирования D на комплексную величину р и получим:
а в соответствии с (4) полученное уравнение приравняем к нулю:
W °2 ( Р ) Wp 2 ( P )X
X W ( P ) - W kg ( P ) W 01 ( P )>° . (5)
В выражении (5) передаточные функции W 02 и W p2( p ) не могут быть равны нулю, т. к. они представляют собой передаточные функции рельсового четырехполюсника и физического устройства согласования в конце рельсовой линии. Другими словами, если W 02( p ) = 0 или Wp 2( p ) = 0, то передаточная функция основного сигнала превращается в нуль ( Wu 1( p ) = 0) и, согласно уравнению (1), информативный сигнал u 2( t ) не отражает сигнал опроса рельсовой линии u 1( t ).
В таком случае W 02( p ) ≠ 0 и Wp 2( p ) ↑ 0; уравнение (5) относительно возмущения принимает вид:
Wog( p)-Wkg (p )• W« (p ) = 0. (6)
В этом основополагающем уравнении звено Wkg ( p ) является компаундирующим элементом (рис. 1) и вводится искусственно для корректировки выходного сигнала обратно пропорционально закону затухания основного сигнала из-за воздействия проводимости изоляции.
Составляющие уравнения (6) показывают, что введение компаундиру- ющего звена преобразует схему компенсации возмущения между точкой приложения возмущения а и координатой x (рис. 1), и это позволяет констатировать, что передаточная функция элементов равна нулю:
Wax (p) = Wog (p) - Wkg (p) Woi (p) = 0.
В данном случае схема превращается в двухканальную структуру, т. к. передаточная функция Wax ( p ) равняется нулю только в том случае, если она содержит минимум два слагаемых (как следует из полученного уравнения), и для осуществления инвариантности необходимо иметь два канала воздействия возмущения на основной тракт (рис. 2)13.
Данный вывод согласуется с условием осуществимости инвариантности, которое гласит, что для обеспечения инвариантности системы необходимо иметь ( n + 1) канал передачи возмущающих воздействий на выходной сигнал.
На рис. 2 один канал передачи возмущения воздействия g ( t ) посредством звена W og ( p ) – физический, а второй канал необходимо создать искусственно через компаундирующее звено Wkg ( p ), которое мы ввели ранее в уравнение передачи возмущения.
Для реализации этого принципа мы должны иметь возможность прямого или косвенного измерения возмуща-
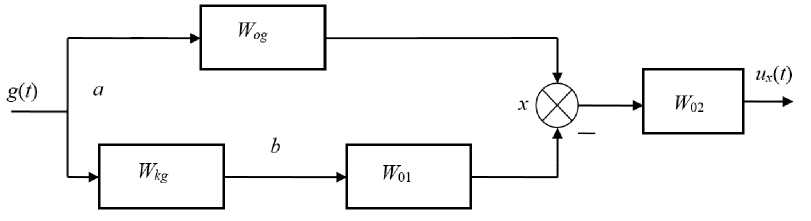
Р и с. 2. Структурная схема принципа двухканальности
F i g. 2. The structural scheme of the principle of two-channels
ющего воздействия. При этом необходимо учесть, что быстродействие компенсационного канала должно быть равно или опережать быстродействие прямого канала передачи возмущения; иначе возмущение, опережая, окажет воздействие на основной сигнал. По результатам измерения возмущения искусственный канал формирует корректирующее воздействие Z'k , которое компенсирует возмущение Zg в координате x (рис. 1).
Реализация инвариантной системы с координатной компенсацией возмущений возможна при выполнении определенных условий. Должны быть обеспечены возможность прямого или косвенного измерения возмущения, техническая возможность реализации корректирующего звена и достижимость требуемой передаточной функции корректирующего звена [22].
На рис. 3 представлена функциональная схема инвариантной системы с координатной компенсацией возмущений.
В качестве измеряемой величины возмущения можно использовать косвенный признак: входное сопротивление рельсового четырехполюсника. Функцией приращения напряжения является закон регулирования, обратно пропорциональный изменению входного сопротивления в координате х .
Том 29, № 2. 2019
В этом случае корректирующее звено W kg преобразует возмущающее воздействие g(t) (входное сопротивление) в компенсационное воздействие Z'k .
Из уравнения (6) следует, что реализуемая передаточная функция Wkg ( p ) связана со звеньями тракта передачи информации соотношением:
W ( p ) ■ W S. (7)
Уравнение (7), помноженное на значение возмущения g ( t ), формирует компенсирующее воздействие Z'k :
2 1 ( p ) - W ogM , ( t X (8)
Вид уравнения (8) зависит от закона изменения возмущающего воздействия и является адаптивным звеном [23], следящим за изменением характера возмущающего воздействия.
Авторами статьи предложен аналог технической реализации, подобный рассматриваемой схеме компенсации возмущений [24]. Компаундирующий сигнал Z'k формируется за счет измерения обратного входного сопротивления рельсового четырехполюсника, и с помощью корректирующего звена W kg , выходная функция которого Z'k = f ( g ),
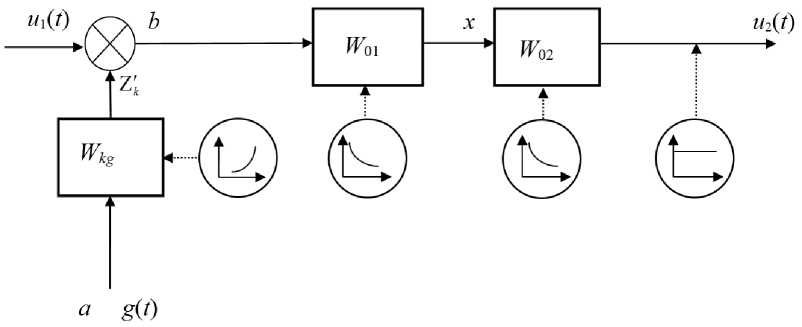
Р и с. 3. Функциональная схема инвариантной системы F i g. 3. The functional scheme of the invariant system
Vol. 29, no. 2. 2019 осуществляется вольтдобавка к сигналу опроса рельсовой линии.
На рис. 4 представлена функциональная схема классификатора с корректирующим звеном, реализующая рассмотренный принцип инвариантности.
В РЛ с распределенными параметрами измерить основной возмущающий фактор – проводимость изоляции – затруднительно, поэтому в статье реакция системы на изменение проводимости изоляции определяется посредством измерения входного сопротивления РЛ. В классе нормального режима оно зависит от проводимости изоляции; в классе шунтового режима – от проводимости изоляции РЛ и координаты нахождения полезного воздействия – сопротивления поездного шунта; в классе контрольного режима – от проводимости изоляции и величины эквивалентного сопротивления места обрыва РЛ [25]. Во всех классах состояний присутствует проводимость изоляции, поэтому с помощью измерителя входного сопротивления и преобразователя напряжения в частоту на управляющем входе источника питания формируется управляющий сигнал Z'k, зависящий от величины проводимости изоляции. Чем выше проводимость, тем больший сигнал подается на вход РЛ для компен- сации снижения уровня сигнала в РЛ вследствие затухания из-за проводимости изоляции. Допускается увеличение входного напряжения до некоторого критического уровня проводимости изоляции, при превышении которого происходит снижение напряжения на входе РЛ. Так обеспечивается инвариантность к возмущающим воздействиям в РЛ в классе нормального режима.
При вступлении поезда на участок контроля входное сопротивление из-за шунтирования рельсов колесами поезда становится ниже критического значения, и напряжение на входе РЛ уменьшается, что помогает фиксировать решающим устройством класс шунтового режима.
При обрыве РЛ, наоборот, происходит увеличение входного сопротивления; как и в предыдущем случае, уменьшается напряжение на входе РЛ и гарантированно фиксируется решающим устройством класс контрольного режима.
Результаты исследования
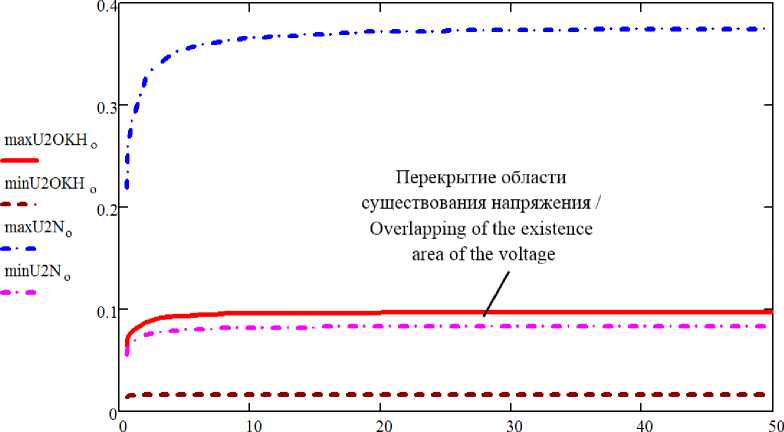
На рис. 5 приведены графики изменения напряжения U 2 = f(g) при отсутствии корректирующего звена в виде совмещенных областей существования напряжений U 2 I N I – в классах нормального и U 2 I S I – шунтового режимов. В ка-
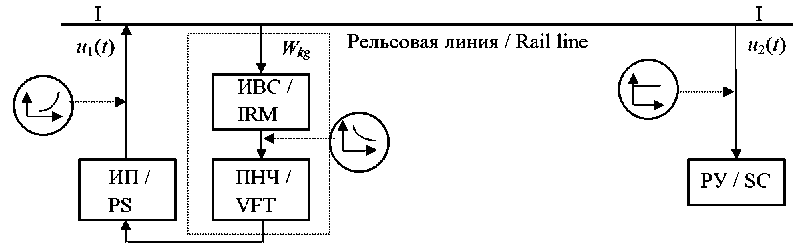
Р и с. 4. Функциональная схема классификатора с корректирующим звеном:
ИП – источник питания, управляемый частотой; ИВС – измеритель входного сопротивления; ПНЧ – преобразователь напряжения в частоту; РУ – решающее устройство классификатора состояний рельсовой линии
F i g. 4. The functional scheme of the classifier with the correcting link: PS – power supply controlled by frequency; IRM – input resistance meter;
VFT – voltage-to-frequency transducer; SC – solver of the classifier of states of a rail line честве объекта моделирования использован классификатор, построенный по классической схеме, с частотой опроса РЛ 50 Гц и длиной РЛ 1 500 м.
Из анализа пространства существования классов нормального и шунтового режимов при изменении сопротивления изоляции от 0,08 до 40 Ом/км следует, что области существования классов перекрываются, т. е. классификатор не может достоверно распознавать классы. Максимальное значение информативного признака – напряжения на входе классификатора в классе шунтового режима – составляет sup U2IIS = 0,098 В, а минимально возможное значение напряжения в классе нормального режима составляет inf U2IIS = 0,06 В. Как следует из графиков, напряжение на приемнике в классе нормального режима из-за воздействия возмущения уменьшается, что приводит к нарушению распознавания класса шунтового режима.
На рис. 6 представлены результаты исследований схемы U 2 = f(g) с корректирующим звеном, преобразующим воздействие возмущения g(t) в компенсационный сигнал, с использованием математического программного пакета Mathcad в виде совмещенных областей существования напряжений U 2 I N I – в классах нормального и U ^S - шунтового режимов.
В качестве объекта моделирования использован классификатор, построенный согласно блок-схеме на рис. 4 с корректирующим звеном, с основной частотой опроса рельсовых линий 50 Гц и дополнительной частотой для построения компенсационного канала 475 Гц.
Исследование результатов показывает, что пределы изменения напряже-
к0
Р и с. 5. Графики выходных напряжений РЛ, причем R o = 1/g;
maxU2OKHo – график максимального выходного напряжения в классе шунтового режима; minU2OKHo – график минимального выходного напряжения в классе шунтового режима; maxU2No - график максимального выходного напряжения в классе нормального режима;
minU2No - график минимального выходного напряжения в классе нормального режима
F i g. 5. The areas of existence of classes of rail lines states: R = 1/g;
maxU2OKHo – graph of the maximum output voltage in the class of shunt mode; minU2OKHo – graph of the minimum output voltage in the class of shunt mode; maxU2No – graph of the maximum output voltage in the class of normal mode;
minU2No – graph of the minimum output voltage in the class of normal mode ния U2IIN в классе нормального режима составляют всего 0,36 ≥ U 2INI ≥ 0,20 В, при этом значение динамического диапазона выходного сигнала, представляющего собой отношение максимального значения напряжения к его минимальному значению, существенно уменьшилось и составляет Kd = 1,499. В шунтовом режиме из-за шунтирования рельсов колесными парами поезда (Rш ≤ 0,06 Ом) происходит уменьшение напряжения U2s на входе классифицирующего устройства. Из графиков (рис. 6) следует, что в классе шунтового режима сигнал на выходе РЛ значительно уменьшается, и диапазон его изменения составляет от U2IIS min = 0,0030 В до U2IIS max = 0,05 В, что подтверждает гипотезу о расстройке алгоритма функционирования.
Обсуждение и заключение
В существующих классификаторах без корректирующего звена, преобразующего воздействие возмущения g(t) в компенсирующий сигнал, коэффициент качества, представляемый как отношение минимального значения напряжения в классе нормального режима к максимальному значению напряжения в классе шунтового режима Ks, равен 0,6, т. е. классификатор не разделяет режимы (нормированное минимальное значение Ks должно быть не менее 1,2). Таким образом, воздействие возмущающего maxU2OKH minU2OKH maxU2
mmU2
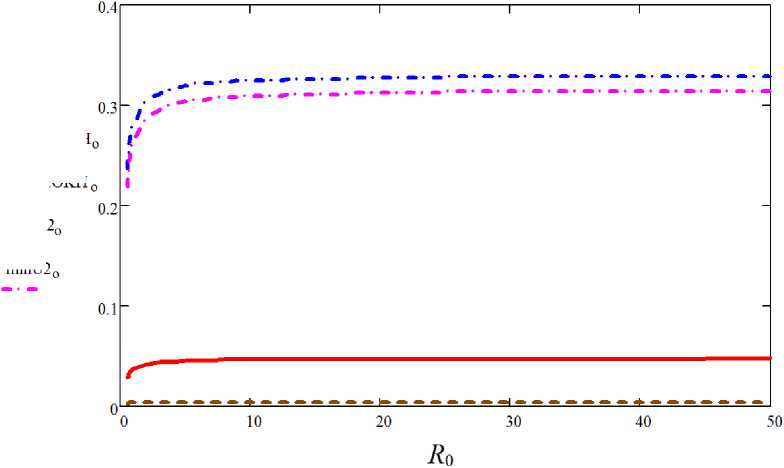
Р и с. 6. Области существования классов состояний рельсовых линий при координатной компенсации возмущающих воздействий: Ro = 1/g;
maxU2OKHo – график максимального выходного напряжения в классе шунтового режима; minU2OKHo – график минимального выходного напряжения в классе шунтового режима; maxU2No - график максимального выходного напряжения в классе нормального режима;
minU2No - график минимального выходного напряжения в классе нормального режима
F i g. 6. The areas of existence of classes of rail lines states under coordinate compensation of disturbing influences: Ro = 1/g;
maxU2OKHo – graph of the maximum output voltage in the class of shunt mode; minU2OKHo – graph of the minimum output voltage in the class of shunt mode; maxU2No – graph of the maximum output voltage in the class of normal mode;
minU2No – graph of the minimum output voltage in the class of normal mode фактора – увеличения проводимости изоляции РЛ – отрицательно сказывается на функционировании систем интервального управления движением поездов.
Для уменьшения влияния возмущения на достоверность распознавания классов состояний РЛ разработан классификатор с элементами самонастройки и компенсации затухания напряжения в РЛ.
Исследование разработанного инвариантного классификатора с корректирующим звеном на входе (первая форма инвариантности) показало, что диапазон изменения выходного напряжения в классе нормального режима уменьшился в 4,54 раза, что подтверждает удачную компенсацию возмущающих воздействий.
В классе шунтового режима, при наличии поезда на участке контроля, предельные значения напряжения на выходе РЛ – входе классификатора – минимум в 10 раз меньше предельных значений в классе нормального режима. Совмещение областей существования классов нормального и шунтового режимов на одном графике наглядно доказывает инвариантные возможности классификатора: коэффициент качества Ks равен 4,585, что в 3,8 раза больше, чем необходимый минимум ( Ks min = 1,2), и в 8,5 раз лучше, чем у классического классификатора с жестким алгоритмом (рис. 5).
Том 29, № 2. 2019
В результате проведенных исследований показана эффективность применения принципов координатной компенсации возмущений при создании инвариантных классификаторов состояний РЛ. В качестве основного возмущающего воздействия, подлежащего компенсации, рассмотрена изменяющаяся в широком диапазоне проводимость изоляции рельсовых линий, которая в реальных условиях изменяется в 4–5 раз больше, чем нормированные граничные значения. Результаты моделирования инвариантного классификатора состояний с применением математического пакета Mathcad и разработанным принципом достижения инвариантности показали, что при компенсации затухания сигнала на входе рельсовой линии диапазон обеспечения инвариантности увеличивается более чем в 10 раз. Если диапазон правильной классификации режимов у существующих классификаторов сохраняется при воздействии возмущения в виде изменения проводимости изоляции рельсовых линий от 0,025 до 1 См/км, то разработанный принцип инвариантности с корректирующим звеном на входе рельсовой линии позволяет расширить этот диапазон от 0,025 до 12 См/км. Это подтверждает универсальность разработанного принципа для систем, на которые воздействуют значительные возмущения.
С. 62–65. URL: https://www.samgups.ru/science/nauchnye_izdaniya/vestnik-transporta-povolzhya/arkhiv/ element.php?SECTION_CODE=vestnik_transporta_povolzhya&ELEMENT_CODE=vestnik_transporta_ povolzhya_-6_2016_
Поступила 25.07.2018; принята к публикации 02.10.2018; опубликована онлайн 28.06.2019
Об авторах:
Все авторы прочитали и одобрили окончательный вариант рукописи.
Список литературы Обеспечение инвариантности к возмущающим воздействиям в рельсовых линиях
- Кравцов Ю. A., Антонов A. A., Бакин M. E. Методика проверки помехоустойчивости приемников тональных рельсовых цепей // Мир транспорта. 2015. Т. 13, № 6 (61). С. 102-109. URL: https://mirtr.elpub.ru/jour/article/view/554
- Ахмадуллин Ф. Р., Леушин В. Б., Юсупов Р. Р. Об одном методе определения области номинальной работы рельсовых цепей // Вестник транспорта Поволжья. 2017. № 3 (63). С. 64-68. URL: https://www.samgups.ru/science/nauchnye_izdaniya/vestnik-transporta-povolzhya/arkhiv/element. php?SECTION_CODE=vestnik_transporta_povolzhya&ELEMENT_CODE=vestnik_transporta_povol-zhya_-3_2017
- Tarasov E. M., Isaicheva A. G. Technique of measurement of ultralow resistance of current conductive junction of rail lines as the problem of states object identification // Proceedings of Proceedings of International Conference Information Technology and Nanotechnology (ITNT-2015) / Eds. N. L. Kazansky [et al.]. CEUR Workshop Proceedings. 2015. Vol. 1490. P. 397-401. DOI: 10.18287/1613-0073-2015-1490-397-401
- Кнеллер В. Ю., Фаянс А. М. Методы обеспечения инвариантности процесов преобразования: выявление и систематизация // Датчики и системы. 2015. № 4 (191). С. 55-67. URL: http://nauka-rus.com/metody-obespecheniya-invariantnosti-protsesov-preobrazovaniya-vyyavlenie-i-sistematizatsiya
- Щипанов Г. В. Теория и методы проектирования автоматических регуляторов // Автоматика и телемеханика. 1939. № 1. С. 49-66. URL: http://www.mathnet.ru/php/archive.phtml?wshow=paper&j rnid=at&paperid=13892&option_lang=rus
- Лузин Н. Н., Кузнецов П. И. К абсолютной инвариантности и инвариантности до е в теории дифференциальных уравнений: ч. 1 // Доклады Академии наук СССР. 1946. Т. 51, № 4. С. 247-249.
- Лузин Н. Н., Кузнецов П. И. К абсолютной инвариантности и инвариантности до е в теории дифференциальных уравнений: ч. 2 // Доклады Академии наук СССР. 1946. Т. 51, № 5. С. 331-333.
- Кулаков Г. Т., Кухоренко А. Н., Голинко И. М. Инвариантная система автоматического регулирования с использованием промежуточного сигнала теплоэнергетического параметра // Энергетика. Известия высших учебных заведений и энергетических объединений СНГ. 2015. № 1. С. 62-72. URL: https://rep.bntu.by/handle/data/14921
- Compensation of polyharmonic disturbance of state and output of a linear plant with delay in the control channel / A. A. Pyrkin [et al.] // Automation and Remote Control. 2015. Vol. 76, issue 12. P. 2124-2142.
- DOI: 10.1134/S0005117915120036
- Francis B. A., Wonham W. M. The internal model principle for linear multivariable regulators // Applied Mathematics and Optimization. 1975. Vol. 2, issue 2. P. 170-194.
- DOI: 10.1007/BF01447855
- Marino R., Tomei P. Adaptive regulator for uncertain linear minimum phase systems with unknown undermodeled exosystems // IFAC Proceedings Volumes. 2008. Vol. 41, issue 2. P. 11293-11298.
- DOI: 10.3182/20080706-5-KR-1001.01913
- Marino R., Tomei P. Adaptive regulation of uncertain linear minimum phase systems with unknown exosystems // Proceedings of the 45th IEEE Conference on Decision and Control. IEEE, 2006. P. 1099-1104.
- DOI: 10.1109/CDC.2006.377667
- Bodson M., Douglas S. C. Adaptive algorithms for the rejection of sinusoidal disturbances with unknown frequency // Automatica. 1997. Vol. 33, issue 12. P. 2213-2221. 10.1016/ S0005-1098(97)00149-0
- DOI: 10.1016/S0005-1098
- Bobtsov A., Pyrkin A. A new approach to MRAC problem with disturbance rejection // IFAC Proceedings Volumes. 2007. Vol. 40, issue 13. P. 92-97. (15)31998-4
- DOI: 10.1016/S1474-6670
- Pyrkin A. A., Bobtsov A. A., Kolyubin S. A. Output controller for nonlinear and MIMO systems with delay // 21st Mediterranean Conference on Control and Automation. IEEE, 2013. P. 1063-1068.
- DOI: 10.1109/MED.2013.6608852
- Гайдук А. Р. Синтез селективно ишариантньгх систем управления // Вестник ИГЭУ 2017. № 1. С. 46-54.
- DOI: 10.17588/2072-2672.2017.1.046-055
- Output adaptive controller for a class of MIMO systems with input delay and multisinusoidal disturbance / J. Wang [et al.] // IFAC-PapersOnLine. 2015. Vol. 48, issue 11. P. 892-899. https://
- DOI: 10.1016/j.ifacol.2015.09.304
- Ефанов Д. В. Некоторые аспекты развития систем функционального контроля устройств железнодорожной автоматики и телемеханики // Транспорт Урала. 2015. № 1 (44). С. 35-40. URL: http://www.usurt.ru/transporturala/arxiv/044_1_20_2_1.pdf
- Tarasov E. M., Zheleznov D. V. Development of an intelligent system of determinating the coordinates and the speed of the train // Transport and Telecommunication. 2016. Vol. 17, no. 2. P. 138-143. https://doi. org/
- DOI: 10.1515/ttj-2016-0013
- Тарасов Е. М., Герус В. Л., Тарасова А. Е. Исследование информативности признаков при распознавании состояний рельсовых линий // Вестник Мордовского университета. 2018. Т. 28, № 2. С. 191-206.
- DOI: 10.15507/0236-2910.028.201802.191-206
- Леушин В. Б., Черезов Г. А., Ахмадуллин Ф. Р. Метод исследования параметров помех в рельсовой и индуктивно-рельсовой линиях // Вестник транспорта Поволжья. 2016. № 6 (60). С. 62-65. URL: https://www.samgups.ru/science/nauchnye_izdaniya/vestnik-transporta-povolzhya/arkhiv/ element.php?SECTION_CODE=vestnik_transporta_povolzhya&ELEMENT_CODE=vestnik_transporta_ povolzhya_-6_2016
- Рустамов Г. А. Построение следящих инвариантных систем на основе эквивалентного ро-бастного управления // Восточно-Европейский журнал передовых технологий. 2015. Т. 1, № 2 (73). С. 50-55.
- DOI: 10.15587/1729-4061.2015.37177
- Рельсовая цепь: а. с. № 1111919 CCCР: B 61 L 23/16 / Пиманов Е. П., Тарасов Е. М., Стратилатов В. В; заявл. 24.08.1983; опубл. 07.09.1984, Бюл. № 33. URL: http://www.findpatent.ru/ patent/111/1111919.html
- On ensuring invariance in problems of control of rail-line conduction / E. M. Tarasov [et al.] // Russian Electrical Engineering. 2017. Vol. 88, issue 3. P. 105-108. 10.3103/ S1068371217030166
- DOI: 10.3103/S1068371217030166
- Kaufman H., Bar-Kana I., Sobel K. Direct adaptive control algorithms: theory and applications. New-York: Springer-Verlag, 1994. 424 p.
- DOI: 10.1007/978-1-4684-0217-9
