Обеспечение экологического равновесия биотехнической системы "ЛЭП-человек-природа", основанное на принципах кибернетики и теории автоматического управления

Автор: Чернышов В.А.
Журнал: Вестник аграрной науки @vestnikogau
Рубрика: Технические науки
Статья в выпуске: 1 (70), 2018 года.
Бесплатный доступ
В связи с бурным ростом протяженности и разветвленности воздушных линий электропередачи (ЛЭП) начинает заметно усиливаться их антропогенное влияние. И хотя развитие электроэнергетики неизбежно ведет к изменению природной среды, эти изменения не должны носить стихийный характер, приводящий к глобальным экологическим кризисам. Они должны быть под постоянным наблюдением и контролем и обеспечивать возможность своевременной адаптации к ним. Такое состояние динамического гомеостаза применительно к данной ситуации можно охарактеризовать как поддержание экологического равновесия биотехнической системы «ЛЭП-Человек-Природа», обеспечивающее устойчивость единовременного протекания социальных, биологических, технических и прочих процессов в рамках антропогенной деятельности человека. В настоящее время известно много научных работ в области экологической кибернетики, как отечественных, так и зарубежных ученых, посвященных вопросам совершенствования теории системного подхода и методов моделирования. Однако ни одна из известных работ не позволяет в полной мере, объективно отразить и адекватно описать процессы, протекающие в сложноорганизованной биотехнической системе «ЛЭП-Человек-Природа», что определяет актуальность проведения научно-исследовательских работ в данном направлении. Разработанная функциональная схема автоматического поддержания экологического равновесия сложноорганизованной биотехнической системы «ЛЭП-Человек-Природа», базируется на принципах кибернетики и теории автоматического управления. Данная схема обеспечивает автоматический контроль текущих параметров, характеризующих экологическую обстановку вокруг ЛЭП, избирает оптимальные способы регулирования и формирует оптимальные регулирующие воздействия, направленные на стабилизацию различных возмущающих факторов, возникающих внутри биотехнической системы «ЛЭП-Человек-Природа» и нарушающих ее экологическое равновесие. Предложенный способ поддержания экологического равновесия биотехнической системы «ЛЭП-Человек-Природа», позволит минимизировать антропогенное влияние воздушной ЛЭП на природную среду и обеспечить высокую надежность электроснабжения и безопасность для человека.
Экологическая безопасность, линия электропередачи, антропогенное влияние, биотехническая система, экологическая кибернетика, автоматическое управление
Короткий адрес: https://sciup.org/147124502
IDR: 147124502 | УДК: 620.91:[007+681.5.01] | DOI: 10.15217/issn2587-666X.2018.1.65
Ensuring the ecological balance of bioengineering system "power line-man-nature", based on the principles cybernetics and control theory
The anthropogenic influence of overhead power lines starts to increase significantly because of rapid development of length and branching. Although the development of power industry will inevitably lead to changes of the natural environment, these changes should not be spontaneous, leading to global ecological crises. They must be supervised and controlled constantly, also they must given an opportunity of timely adaptation. This state of dynamic homeostasis applied to this situation can be described as the ecological balance of biotechnical systems "Power line-Man-Nature", ensuring the stability of the state-of-the art flow of social, biological, technological and other processes under the anthropogenic activity. Currently, there are many scientific papers in the field of environmental сybernetics written by both domestic and foreign scientists, which are devoted to the improvement of the theory of system approach and modeling techniques. However, none of the known works allows to demonstrate objectively and describe the processes, occurring in the complex biotechnical systems "Power line-Man-Nature" and it determines the relevance of the scientific research in this direction. The developed functional diagram of automatic control of ecological balance of complex biotechnical system is based on principles of cybernetics and automatic control theory. This scheme provides automatic control of current parameters, characterizing the environment around power lines, and chooses the optimum methods of control and forms of optimal regulatory impact aimed at stabilizing various disturbing factors appeared in biotechnical systems "Power line-Man-Nature" and violating its ecological balance. The proposed method of maintaining the environmental balance of biotechnical systems "Power line-Man-Nature" will help to minimize anthropogenic impact of overhead power lines on the environment and to ensure of high reliability of electric supply and human safety.
Текст научной статьи Обеспечение экологического равновесия биотехнической системы "ЛЭП-человек-природа", основанное на принципах кибернетики и теории автоматического управления
Вве^ение. В настоящее время, в связи с бурным ростом протя^енности и разветвленности воздушных линий электропередачи (ЛЭП) начинает заметно сказываться их антропогенное влияние. Развитие электросетевой инфраструктуры приводит к необратимым изменениям природных ландшафтов, что способствует вытеснению растений и ^ивотных из естественной среды обитания. С разрастанием воздушной электрической сети происходит увеличение числа аварий на ЛЭП, обусловленных влиянием погодноклиматических факторов, флоры, фауны, а так^е конфликтом интересов, охватывающих различные сферы ^изнедеятельности самого человека [1].
^варии на ЛЭП зачастую являются причиной возникновения по^аров, гибели людей и ^ивотных. И хотя развитие электроэнергетики неизбе^но ведет к изменению природной среды, эти изменения не дол^ны носить стихийный характер, приводящий к глобальным экологическим кризисам [2]. Они дол^ны находиться под постоянным наблюдением и контролем и обеспечивать возмо^ность своевременной адаптации к ним. Такое состояние динамического гомеостаза применительно к данной ситуации мо^но охарактеризовать как поддер^ание экологического равновесия биотехнической системы «ЛЭП-Человек-Природа», обеспечивающее устойчивость единовременного протекания социальных, биологических, технических и прочих процессов в рамках антропогенной деятельности человека.
Цель работы – разработать новый, эффективный способ поддер^ания экологического равновесия сло^ноорганизованной биотехнической системы «ЛЭП-Человек-Природа», основанный на принципах кибернетики и теории автоматического управления объектами разной физической природы.
Услови^, материалы и мето^ы. В связи с популяризацией природоподобных технологий во многих отраслях науки и производства получили широкое распространение исследования в области кибернетики, как науки, рассматривающей управление сло^ными системами, пре^де всего с биологическими объектами. Ветвь кибернетики, предметом которой стали исследования управления в экологии известна под названием экологическая кибернетика. Экологическая кибернетика рассматривает анализ и синтез сло^ных биотехнических систем, точного описания которых пока не существует или не существует возмо^ности их достоверно произвести.
В настоящее время существует много научных работ в области экологической кибернетики, как отечественных, так и зарубе^ных ученых, посвященных вопросам совершенствования теории системного подхода и методов моделирования. Однако ни одна из известных работ не позволяет в полной мере, объективно отразить и адекватно описать процессы, протекающие в сло^ноорганизованной биотехнической системе «ЛЭП-Человек-Природа», что определяет актуальность проведения исследовательских работ в данном направлении. Стремительное развитие информационновычислительных и телекоммуникационных технологий открывает перед научным сообществом всё новые возмо^ности [3, 4] по всемерному развитию принципиально новых методов управления сло^ноорганизованными биотехническими процессами, позволяющими минимизировать риск возникновения глобального экологического кризиса, связанного с антропогенной деятельностью человека по передаче электрической энергии посредством воздушных ЛЭП.
Результаты и обсуждение. Графическая интерпретация разработанного способа представлена на рис. 1 в виде функциональной схемы автоматизации. Основными контролируемыми объектами биотехнической системы «ЛЭП-Человек-Природа» являются следующие элементы: воздушная линия электропередачи (U); санитарно-защитная или охранная зона воздушной ЛЭП (S); флора (F); фауна (G); человек (H). Управление состоянием и взаимодействием данных элементов осуществляется посредством системы автоматического регулирования (С^Р), включающей в себя датчики-регистраторы (1-13), которые могут быть как наземного, так и воздушного и да^е космического базирования, преобразователи информации (SY1-UY14), технологические контроллеры XIRKSA-№1 и XIRKSA-№2, регулирующие органы XC1-XC22, средства запуска NS1-NS22 и исполнительные механизмы 14-33.
Сигналы, характеризующие влияние погодно-климатических факторов на аварийность ЛЭП, поступают с датчиков 1-9 через преобразователи информации (SY1-LY9) на технологический контролер XIRKSA-№1 с установленным на нем программным обеспечением «Синоптик замыканий» (Sizam) [5].
В основе работы программного обеспечения «Синоптик замыканий» ле^ит теория математического моделирования количества аварий в расчете на 100 км ЛЭП, характеризующихся разным уровнем напря^ения, разной длинной и техническим состоянием, для теплого и холодного периодов года, опирающаяся на данные статистики об аварийности ЛЭП и значениях погодноклиматических факторов за последние 5 лет. Технологический контроллер XIRKSA-№1 формирует объективную информацию о эксплуатационной безопасности элемента U.
^ппаратная информация, характеризующая качественное и количественное состояние элементов (U; S; F; G; H) дистанционно поступает от датчиков регистраторов 9-13 через преобразователи информации UY10-UY14 на технологический контроллер XIRKSA-№2 с установленным программным обеспечением «Менед^ер-эколог» [6].
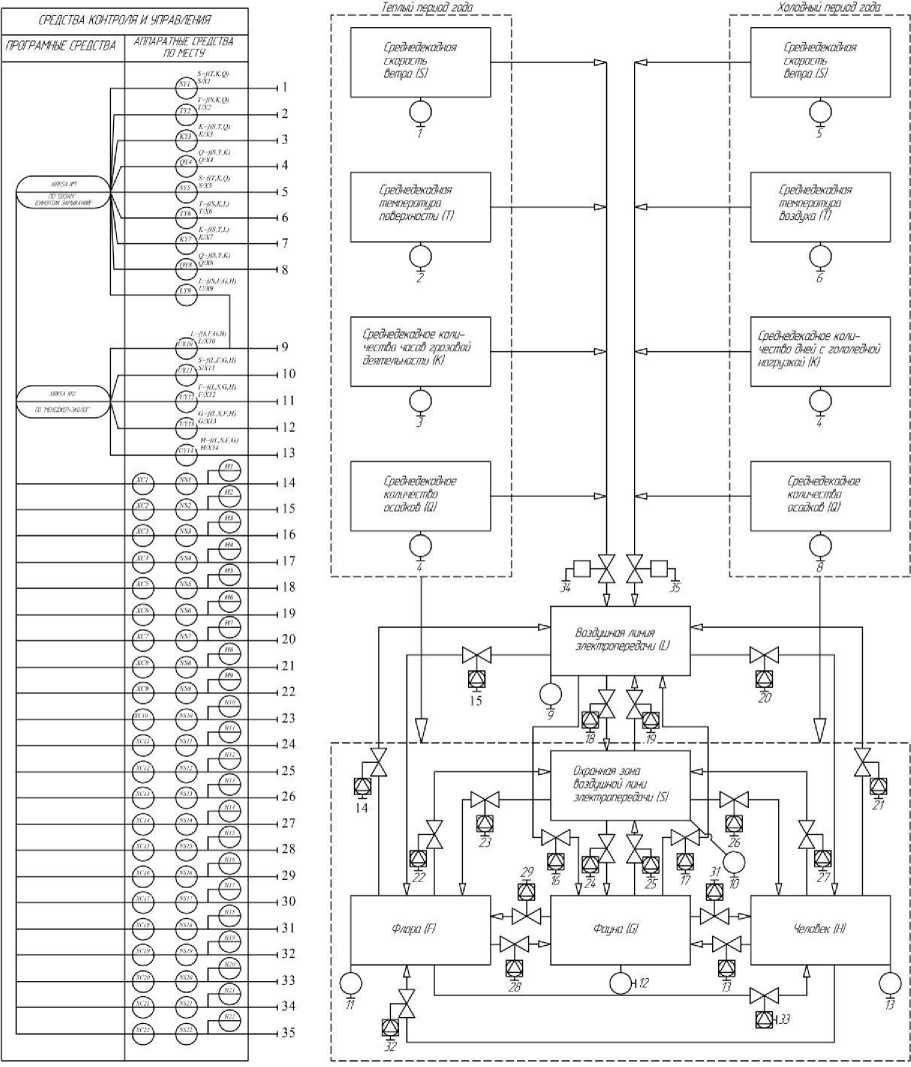
Рисунок 1 – Функциональная схема автоматического поддер^ания экологического равновесия биотехнической системы «ЛЭП-Человек-Природа»
В основе работы программного обеспечения «Менед^ер-эколог» зало^ена кибернетическая теория потоковых графов, позволяющая достоверно качественно и количественно оценивать влияния ка^дого элемента друг на друга и на всю систему в целом (как напрямую, так и посредственно, через другие элементы), а так^е оценивать влияние всей системы на ка^дый элемент. Технологический контроллер XIRKSA-№2 формирует соответствующие команды регулирующим органам XC1-XC22 (структурным подразделениям) на использование необходимых пусковых ресурсов NS1-NS22 и исполнительных механизмов 14-33, для реализации мер непрерывного, прерывистого и релейного регулирующих воздействий, направленных на стабилизацию экологического равновесия биотехнической системы «ЛЭП-Человек-Природа».
В качестве исполнительных механизмов, используемых для стабилизации экологического равновесия, могут выступать различные организационные и технические мероприятия, обеспечивающие охрану окру^ающей природной среды, безопасность ^изнедеятельности человека и эксплуатационную наде^ность работы воздушной ЛЭП, в том числе и разработанные автором оригинальные способы и устройства [7-18]. В случае выявления неэффективного действия исполнительного механизма, на его использование мо^ет вноситься корректировка, частичная блокировка или полный запрет посредством предписаний Н1-Н22, формируемых уполномоченными лицами (экспертами), осуществляющими непрерывный экологический мониторинг биотехнической системы «ЛЭП-Человек-Природа», которые так^е могут выполнять и функции преобразователей информации (SY1-LY14).
Согласно теории автоматического управления, разработанная С^Р дол^на обеспечивать следующие способы регулирования: по отклонению регулируемой величины, по возмущению и комбинированный. Протекание процессов ме^ду элементами биотехнической системы «ЛЭП-Человек-Природа» характеризуется действием различных возмущений, связанных поло^ительным, нейтральным или отрицательным влиянием элементов друг на друга под воздействием целого ряда факторов, в том числе и погодно-климатических. Все эти возмущения могут повлечь за собой нарушение экологического равновесия биотехнической системы.
Для контроля экологической безопасности биотехнической системы «ЛЭП-Человек-Природа» разработан ряд критериев, таких как критерий эксплуатационной безопасности ЛЭП и критерий экологической безопасности ЛЭП [19, 20]. С^Р, работающая по способу отклонения, представлена схемой на рис. 2, а. Если под действием возмущений разность ме^ду действительным и предписанным значением (критерием) регулируемой величины (отклонение) превысит заданный предел, то на регулятор поступит задающее воздействие,
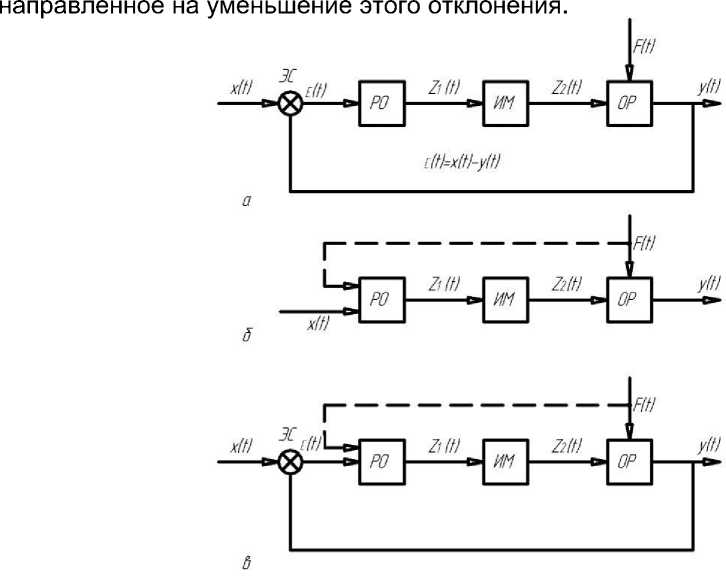
Рисунок 2 – Схемы способов регулирования: а – по отклонению, б – по возмущению, в – комбинированный, РО – регулирующий орган, ИМ – исполнительный механизм, ОР – объект регулирования, ЭС – элемент сравнения, х(t) – задающее воздействие, Z1(t) и Z2 (t) – внутренние регулирующие воздействия, у(t) – регулируемая величина, F(t) – возмущающее воздействие
Отклонение регулируемой величины приводит в действие исполнительный механизм, это действие всегда направлено так, что оно уменьшает отклонение. Для получения разности величин E(t)=x(t)-у(f) в систему вводится элемент сравнения ЭС. Способ регулирования по возмущению, или компенсация возмущения, основан на том, что в системе применяются устройства, компенсирующие влияние изменения возмущающего воздействия. В общем случае схема системы, работающей по способу компенсации возмущения, показана на рис. 2, б. Возмущающие воздействия могут быть вызваны разными причинами, при этом их мо^ет быть не одно, а несколько, это усло^няет работу САР, поэтому в практике целесообразно ограничиваться рассмотрением возмущающих воздействий, вызванных только основной причиной.
Комбинированный способ регулирования (рис. 2, в) сочетает в себе два предыдущих способа: по отклонению и по возмущению. Данный способ применяется при построении более сложных САР, формирующих высококачественное регулирование, например, в критических условиях, когда в рамках функционирования биотехнической системы «ЛЭП-Человек-Природа» ставится под сомнение гармоничное существование ее элементов.
Как следует из рис. 2, при любом способе регулирования, САР состоит из регулируемой (объект регулирования) и регулирующей частей.
Регулирующая часть включает: датчик-регистратор, измеряющий текущее значение регулируемой величины; элемент сравнения, измеряющий отклонение регулируемой величины от предписанного значения; регулирующий орган, формирующий сигналы управления по стабилизации регулируемой величины; исполнительный механизм, обеспечивающий восстановление заданного значения регулируемой величины после ее отклонения.
При взаимодействии элементов биотехнической системы «ЛЭП-Человек-Природа», датчики-регистраторы производят непрерывные измерение различных параметров, характеризующих состояние ее элементов, поэтому регулирующие сигналы также будут вырабатываться непрерывно. При этом регулирующие воздействия исполнительных механизмов, управляемых разными регулирующими органами, могут быть непрерывными или иметь прерывистый характер.
На рис. 3, а представлена кривая отклонения Ау регулируемой величины у по времени от заданного значения у0, одновременно в ни^ней части рисунка показано, как дол^но непрерывно меняться регулирующее воздействие Z исполнительного механизма. Оно находится в линейной зависимости от регулирующего сигнала и совпадает с ним по фазе. Регулирующие органы, вырабатывающие такое воздействие, называются регуляторами непрерывного действия, а само регулирование - непрерывным регулированием. Регуляторы, построенные по такому принципу, работают только тогда, когда существует регулирующее воздействие, т.е. пока имеется отклонение ме^ду действительным и предписанным значением регулируемой величины. Если в процессе работы С^Р регулирующее воздействие при непрерывном регулирующем сигнале прерывается в некоторые проме^утки времени или подается в форме отдельных импульсов, то регуляторы, работающие по такому принципу, называются регуляторами прерывистого действия. Принципиально возмо^ны два способа формирования прерывистого регулирующего воздействия.
На рис. 3, б и в представлены графики прерывистого регулирующего воздействия при непрерывном отклонении А регулируемой величины. В первом случае регулирующее воздействие представлено импульсами одинаковой длительности At, следующими через равные интервалы времени t1=t2=t при этом величина импульсов Z=f(t) пропорциональна значению регулирующего сигнала в момент формирования регулирующего воздействия.
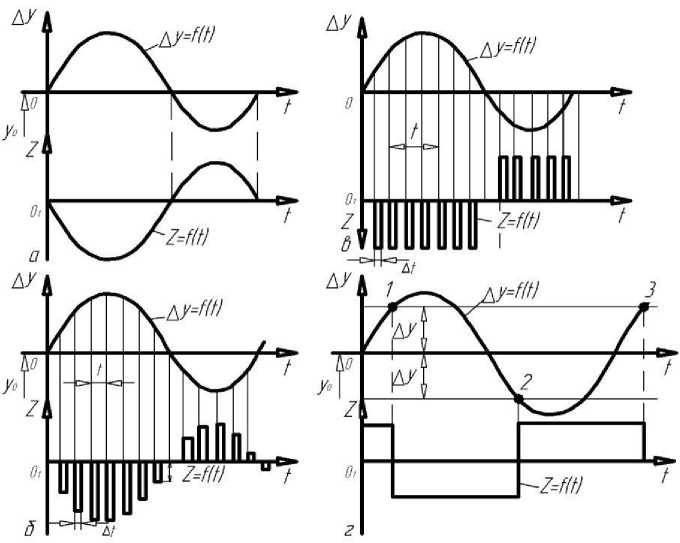
Рисунок 3 – Диаграммы основных видов регулирующих воздействий: а – непрерывное; б, в – прерывистое; г – релейное
Во втором случае все импульсы имеют одинаковую величину Z=f(t) и следуют через равные интервалы времени t1=t2=t, но имеют различную длительность Δt, зависящую от значения сигнала регулирования в момент формирования регулирующего воздействия. При этом регулирующее воздействие от регулирующего органа передается исполнительному механизму с соответствующими перерывами, поэтому исполнительный механизм оказывает регулирующее воздействие так^е с перерывами.
Для обеспечения экологического равновесия биотехнической системы «ЛЭП-Человек-Природа» свое применение могут найти так^е и системы регулирования релейного типа (рис. 3, г). Регулирующие органы, обеспечивающие принцип двухпозиционного регулирования имеют только два устойчивых поло^ения: первое – когда отклонение регулируемой величины перейдет установленный поло^ительный предел +Δу, и второе – когда отклонение изменит знак и достигнет отрицательного предела -Δу. Регулирующее воздействие в обоих случаях одинаково по абсолютной величине, но противополо^но по знаку, это воздействие через регулятор заставляет исполнительный механизм функционировать скачкообразно, таким образом, чтобы абсолютная величина отклонения всегда уменьшалась. Если величина отклонения Δу достигнет допустимого поло^ительного значения +Δу (точка 1), управляющий микроконтроллер сформирует сигнал и на объект через регулирующий орган и исполнительный механизм будет действовать регулирующее воздействие -Z, которое противополо^но по знаку, но равно по величине поло^ительному значению регулирующего воздействия +Z. Отклонение регулируемой величины по истечении некоторого времени будет уменьшаться. Достигнув точки 2, отклонение Δу станет равным допустимому отрицательному значению -Δу, микроконтроллер сформирует соответствующий сигнал и регулирующее воздействие Z изменит свой знак на противополо^ный и т.д. Релейное регулирование в сравнении с другими видами регулирования является наиболее простым по функционалу, поэтому находит свое применение в тех случаях, где не требуется большая чувствительность к возмущающим воздействиям.
Выво^ы. На основании вышеизло^енного следует, что разработанная С^Р контролирует текущие параметры, характеризующие экологическую обстановку вокруг ЛЭП, избирает оптимальные способы регулирования и формирует оптимальные регулирующие воздействия, направленные на стабилизацию различных возмущающих факторов внутри биотехнической системы «ЛЭП-Человек-Природа», негативно влияющих на ее экологическое равновесие.
Таким образом, в данной работе, предло^ен и теоретически обоснован новый способ поддер^ания экологического равновесия биотехнической системы «ЛЭП-Человек-Природа», основанный на принципах кибернетики и теории автоматического управления, позволяющий минимизировать антропогенное влияние воздушной ЛЭП на природную среду и обеспечивать высокую наде^ность электроснаб^ения и безопасность для человека.
информационно-измерительной системы контроля и прогнозирования профессиональных рисков на электросетевых предприятиях агропромышленного комплекса // Науковий вісник НУБіП України. Серія: Техніка та енергетика ^ПК. 2015. № 209-2. С. 80-86.
Список литературы Обеспечение экологического равновесия биотехнической системы "ЛЭП-человек-природа", основанное на принципах кибернетики и теории автоматического управления
- Глыбина Ю.Н., Беликов Р.П., Фомин И.Н. Анализ видов и количества повреждений в электрических сетях класса напряжения 6-10 кВ//Агротехника и энергообеспечение. 2017. № 3 (16). С. 43-49.
- Астахов С.М., Беликов Р.П. Состояние и пути повышения эффективности функционирования распределительных сетей в агропромышленном комплексе//Вестник ОрелГАУ. 2011.Т. 29. № 2. С.106-108.
- Мешков Б.Н., Чернышов В.А. Закон энергоэффективности, продиктованный природой//Главный энергетик. 2013. № 8. С.32-35.
- Гавриченко А.И., Беликов Р.П. Разработка автоматизированной информационно-измерительной системы контроля и прогнозирования профессиональных рисков на электросетевых предприятиях агропромышленного комплекса//Науковий вiсник НУБiП України. Серiя: Технiка та енергетика АПК. 2015. № 209-2. С. 80-86.
- Свидетельство о государственной регистрации программ для ЭВМ № 2008610196 РФ. Расчет ожидаемого количества замыканий на землю в распределительных сетях 10 кВ с изолированной нейтралью SIZAM (синоптик замыканий)/Чернышов В.А., Гавриченко А.И.; заявитель Орловский государственный аграрный университет. № 200761427; заявл. 29.10.2007; опубл. 09.01.2008.
- Свидетельство о государственной регистрации программ для ЭВМ № 2011616873 РФ. «ECOLOGY-EXPERTS (for system Power line-Human-Nature) -экологическая экспертиза биотехнической системы ЛЭП-Человек-Природа»/Чернышов В.А., Чернышова Л.А.; заявитель Орловский государственный аграрный университет. № 2011615036; заявл. 07.07.2011; опубл. 06.09.2011.
- Пат. 2304334 РФ, МПК H02H3/16. Способ защиты трехфазной сети с изолированной нейтралью от однофазных замыканий на землю/Васильев В.Г., Чернышов В.А.; патентообладатель Орловский государственный аграрный университет. № 2006114235/0,9; заявл. 25.04.2006; опубл. 10.08.2007, Бюл. № 22. 4 с.
- Пат. 2320062 РФ, МПК H02H3/16. Способ повышения безопасности при возникновении замыканий на землю в электрических сетях с изолированной нейтралью/Чернышов В.А., Гавриченко А.И., Чернышова Л.А., Чернышов А.А.; патентообладатель Орловский государственный аграрный университет. № 2006138514/0,9; заявл. 31.10.2006; опубл. 20.03.2008, Бюл. № 8. 5 с.
- Пат. 2328800 РФ, МПК H02H3/16. Способ дистанционного отключения участка линии с замыканием на землю и его идентификации в распределительных сетях с изолированной нейтралью/Чернышов В.А., Гавриченко А.И.; патентообладатель Орловский государственный аграрный университет. № 2007119853/0,9; заявл. 28.05.2007; опубл. 10.07.2008, Бюл. № 19. 5 с.
- Пат. 2317624 РФ, МПК H02H3/16. Способ идентификации опоры с замыканием на землю в распределительных сетях с изолированной нейтралью/Чернышов В.А., Гавриченко А.И.; патентообладатель Орловский государственный аграрный университет. № 2006136746; заявл. 16.10.2006; опубл. 20.02.2008, Бюл. № 5. 4 с.
- Пат. 2335053 РФ, МПК H02H3/16. Регистратор протекания тока замыкания на землю для опор линии электропередачи/Чернышов В.А., Гавриченко А.И., Чернышова Л.А.; патентообладатель Орловский государственный аграрный университет. № 2007134938/09; заявл. 19.09.2007; опубл. 27.09.2008, Бюл. № 27. 5 с.
- Пат. 2417499 РФ, МПК H02H3/16. Способ размещения потребительских трансформаторных подстанций в электрических сетях с изолированной нейтралью/Чернышов В.А., Чернышова Л.А.; патентообладатель Орловский государственный аграрный университет. № 2009141651/07; заявл. 10.11.2009; опубл. 27.04.2011, Бюл. № 12. 5 с.
- Пат. 2441365 РФ, МПК A01G23/00. Способ предотвращения повреждений на воздушных линиях электропередачи, проходящих по лесным труднодоступным просекам/Чернышов В.А., Гавриченко А.И., Печагин Е.А., Чернышова Л.А.; патентообладатель Орловский государственный аграрный университет. № 2010131306; заявл. 26.07.2010; опубл. 10.02.2012, Бюл. № 13. 5 с.
- Пат. 2461109 РФ, H02H3/16 G01R31/08. Способ дистанционной идентификации опоры с замыканием на землю в сетях с изолированной нейтралью посредством спутниковой навигации/Чернышов В.А., Чернышова Л.А.; патентообладатель Орловский государственный аграрный университет. № 2010149823/07; заявл. 03.12.2010; опубл. 10.09.2012, Бюл. № 25. 5 с.
- Пат. 2457595 РФ, МПК H02H003/16, G01R031/08. Регистратор величины тока замыкания на землю для опор линии электропередачи/Чернышов В.А. Чернышова Л.А.; патентообладатель Орловский государственный аграрный университет. № 2011117395/07; заявл. 29.04.2011; опубл. 27.07.2012, Бюл. № 21. 7 с.
- Пат. 2457594 РФ, МПК H02H3/14. Способ экранирования электромагнитного поля воздушной ЛЭП в распределительных сетях с изолированной нейтралью/Чернышов В.А., Чернышова Л.А.; патентообладатель Орловский государственный аграрный университет. № 2011125899/07; заявл. 22.06.2011; опубл. 27.07.2012, Бюл. № 21. 5 с.
- Пат. 2536168 РФ, МПК G01R 31/08, H02H 3/16. Способ определения места возникновения однофазного замыкания на землю для воздушной линии электропередачи в сетях с изолированной нейтралью/Чернышов В.А., Мешков Б.Н.; патентообладатель Орловский государственный аграрный университет. № 2013112911/07; заявл. 22.03.2013; опубл. 20.12.2014, Бюл. № 35. 5 с.
- Пат. 2576017 РФ, МПК H02H 3/16. Способ ограничения тока однофазного замыкания на землю для воздушной линии электропередачи в сети с изолированной нейтралью/Мешков Б.Н., Чернышов В.А.; патентообладатель Орловский государственный аграрный университет. № 2014116282/07; заявл. 22.04.2014; опубл. 22.072.2016, Бюл. № 6. 5 с.
- Обобщенный критерий эксплуатационной безопасности распределительной сети с изолированной нейтралью/В.А. Чернышов, А.А. Чернышов, Е.А. Печагин, М.Г. Егоров//Вестник ТГТУ. 2015. Т. 21. № 4. С. 567-571.
- Чернышов В.А., Чернышова Л.А. Обоснование критериев антропогенной и экологической безопасности воздушной линии электропередачи//Агротехника и энергообеспечение. 2014. №2(2). С.60-71.
