Обеспечение экстремального регулирования мощности первичных источников энергии при их совместной работе на общую нагрузку

Автор: Непомнящий О. В., Краснобаев Ю. В., Яблонский А. П., Солопко И. В., Личаргин Д. В.
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Авиационная и ракетно-космическая техника
Статья в выпуске: 1 т.21, 2020 года.
Бесплатный доступ
В системах электропитания космических аппаратов, беспилотных и пилотируемых летательных аппаратов в качестве первичных источников энергии широко используются солнечные батареи. Для энергоснабжения наземных автономных объектов находят применение возобновляемые источники энергии различной природы, позволяющие использовать энергию Солнца, ветра, волн, рек, приливов и т. п. Применение в составе автономной системы электропитания разнородных источников энергии позволяет осуществлять генерацию электрической энергии на интервалах времени, когда отсутствует поступление энергии от части используемых источников. Согласование первичных источников энергии с различными характеристиками и условиями работы в рамках одной системы электропитания приводит к возникновению дополнительных сложностей, связанных с регулированием мощности источников, что и определяет актуальность рассматриваемых задач. Цель исследования: разработка способов объединения первичных источников энергии с различными характеристиками и условиями работы в единую автономную систему электропитания и алгоритмов управления контроллерами этих источников. Задачи: создание имитационной модели системы электропитания в среде MATLAB/Simulink; разработка и проверка алгоритма управления контроллерами первичных источников, обеспечивающего поддержание желаемого тока заряда аккумуляторной батареи системы электропитания; разработка и проверка алгоритмов управления контроллерами первичных источников, обеспечивающих отбор максимальной мощности от каждого из нескольких первичных источников, в том числе и с минимизацией времени поиска точки максимальной мощности. Методы исследования: имитационное моделирование системы электропитания с использованием языка Simulink, входящего в состав программного пакета MATLAB 7.9. Результаты: разработана имитационная модель системы электропитания, включающая два источника энергии с различными характеристиками. При избытке мощности, генерируемой первичным источником энергии, контроллер источника энергии находится в режиме заряда аккумуляторной батареи заданным фиксированным током. При дефиците мощности первичного источника контроллер функционирует в режиме поиска экстремальной мощности. Структура системы электропитания позволяет управлять двумя источниками энергии независимо друг от друга. Таким образом, контроллеры источников энергии могут находиться в различных режимах работы, обеспечивая повышенную гибкость системы электропитания. Использование алгоритма управления на нечеткой логике увеличивает скорость поиска точки максимальной мощности, а также повышает точность работы алгоритма. Проведенные с использованием разработанной модели испытания подтвердили работоспособность алгоритмов управления контроллеров солнечной батареи во всех режимах работы. Подтверждена работоспособность алгоритма выбора режима работы контроллеров в различных условиях. Предложенные алгоритмы позволяют осуществлять эффективное регулирование мощности первичных источников энергии в зависимости от различных условий работы автономной системы электропитания.
Автономная система электропитания, солнечная батарея, контроллер солнечной батареи, имитационная модель, аккумуляторная батарея, экстремальное регулирование
Короткий адрес: https://sciup.org/148321958
IDR: 148321958 | УДК: 621.31.629.78 | DOI: 10.31772/2587-6066-2020-21-1-85-95
Ensuring extreme regulation of power of primary energy sources at their joint operation for total load
Heterogeneous energy sources and homogeneous energy sources with different characteristics are frequently used in autonomous power supply systems. Solar batteries are widely used as primary energy sources for on-board power supply systems of spacecrafts, unmanned and manned aircrafts. Renewable energy sources such as solar, wind, geothermal and hydro energy, serve as primary energy sources of terrestrial autonomous power supply systems. Matching primary energy sources with different characteristics and operating conditions within a unified power supply system leads to problems connected with the power control of energy sources, which determines the relevance of the considered problems. The main aim of the study is to develop a combination of primary energy sources and control techniques which allow using primary energy sources with different characteristics and operating conditions in unified autonomous power supply system. The objectives of the study are to create the simulation model of a power supply system using MATLAB/Simulink software; to develop and test control algorithms for primary energy source controllers that would allow to maintain the needed battery charging current; to develop and test control algorithms for primary energy source controllers that would allow the primary energy sources to operate in the maximum power point tracking mode and to minimize the maximum power point search time. Methods used in the study: the simulation of a power supply system using MATLAB 7.9 Simulink software. Results: the simulation model of a power supply system including two primary energy sources with different characteristics is designed. In the case of excess power generating by the primary energy source, its controller operates in the battery charging mode. When the primary source power shortage occurs, its controller operates in the maximum power point tracking mode. The proposed power supply system structure allows controlling two energy sources independently, thus the primary energy source controllers can operate in different modes. This provides flexibility of the power supply system. The use of fuzzy logic control algorithm increases the accuracy and search speed of the maximum power point tracking algorithm. Simulation results confirmed the efficiency of the proposed solar controller operation algorithms in all modes stated above. The efficiency of controller operation modes selection algorithm was confirmed in different operating conditions. The proposed algorithms allow implementing the effective control of primary power sources depending on power supply system operating conditions.
Текст научной статьи Обеспечение экстремального регулирования мощности первичных источников энергии при их совместной работе на общую нагрузку
Ведение. В автономных системах электроснабжения (PSS) широко используются возобновляемые источники энергии. Например, в PSS космических и беспилотных летательных аппаратов в качестве первичных источников энергии широко используются солнечные панели [1–3]. В свою очередь, возобновляемые источники энергии, такие как Солнце, ветер, волны, реки, приливы и т. д., обеспечивают энергией наземные автономные объекты [2–5]. При этом известны решения, допускающие совместное, гетерогенное использование некоторых типов источников.
Использование различных комбинаций разнородных источников энергии позволяет снизить зависимость потребителя от изменяющихся внешних условий, влияющих на выход полезной мощности [3–7]. В PSS космического применения первичными источниками (PS) энергии являются солнечные панели (SP) [8–11]. При этом конструктивные особенности или технологии монтажа последних зачастую приводят к различиям в характеристиках этих SP.
Обеспечение совместной, сбалансированной работы первичных источников энергии с различными характеристиками в различных условиях эксплуатации обуславливает решения ряда актуальных научно-технических задач. При этом основной задачей является обеспечение контроля мощности каждой PS.
Постановка задачи. Автономные системы электропитания включают в себя первичные источники энергии, аккумуляторную батарею (SB), кабельную сеть и PS-контроллеры, выполненные в виде преобразователей с управляющими устройствами.
Ниже приведены алгоритмы работы и структура SP-контроллеров, входящих в состав автономной системы электропитания с солнечными батареями, использующимися в качестве первичных источников энергии. В данном случае алгоритм работы SP-контроллера должен обеспечивать заряд батареи как постоянным током заданного значения, так и уменьшающимся током. При этом требуется сохранение определенного фиксированного напряжения в случае, когда текущая мощность батареи превышает суммарную потребляемую мощность. В случае, когда текущая мощность SP меньше общей мощности, потребляемой нагрузкой и аккумулятором, контроллер SP работает в режиме поиска максимальной мощности и обеспечивает отбор максимальной мощности от SP.
PSS микроспутников и малых космических аппаратов обычно включают несколько секций солнечных панелей, расположенных с каждой стороны космического аппарата [8–10]. Поэтому секции SP такого космического корабля находятся в различных условиях освещения и вносят различный вклад в общую мощность солнечных элементов. Кроме того, секции SP могут иметь разные характеристики и максимальную мощность, которую может генерировать каждая секция SP. Это зависит не только от индивидуальных характеристик секции, но также и от ориентации секции на Солнце.
Когда несколько SP с различными характеристиками подключены к общей нагрузке параллельно с использованием общего преобразователя напряжения [4; 8; 9], положение рабочих точек на характеристике мощности каждого источника энергии не может контролироваться индивидуально, поскольку контроллер SP в этом случае будет обеспечивать контроль положения рабочей точки по результирующей силовой характеристике параллельно подключенного SP. В режиме выбора экстремальной мощности это приводит к уменьшению общей мощности передаваемой SP нагрузки. Таким образом, необходимо использовать отдельные контроллеры SP, которые могут обеспечивать независимое регулирование положения рабочих точек по характеристикам мощности для SP.
Достижения современной микропроцессорной техники позволяют уменьшить размеры управляющего устройства и реализовать управление SP-контроллером на основе микроконтроллера [12]. Применение микропроцессорного ядра позволяет реализовать не только пошаговый алгоритм поиска экстремума мощности SP [13–15], но и более сложные алгоритмы, которые ускоряют процесс поиска экстремума и увеличивают мощность. Это позволяет регулировать уровень, генерируемый SP, при уменьшении амплитуды колебаний рабочей точки на вольт-амперной характеристике SP в окрестности точек максимальной мощности [16; 17]. Ускорение процесса поиска экстремума особенно важно в случае вращения космического аппарата вокруг своей оси с определенной угловой скоростью [9; 10]. Авторами предложен подход к реализации системы электропитания с несколькими источниками энергии и разработаны алгоритмы управления для контроллеров SP.
Решение проблемы. При решении задачи раздельного регулирования мощности используется структурная схема автономной PSS, приведенная на рис. 1.
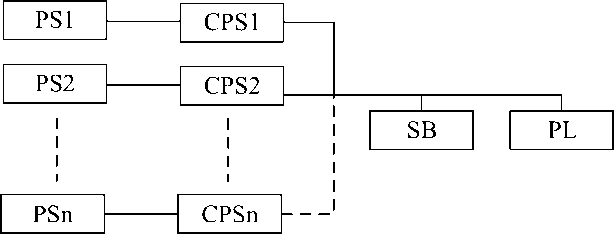
Рис. 1. Структурная схема автономной системы энергоснабжения с несколькими первичными источниками энергии
-
Fig. 1. Structural diagram of autonomous power supply system with several primary
energy sources
Согласно рис. 1, источники энергии PS1 и PSn соединены последовательно с контроллерами PS (CPS1 и CPSn). Выходные порты контроллеров CPS1-CPSn подключены к SB и к силовой нагрузке (PL). Это обеспечивает независимое управление источниками энергии и следующие режимы работы контроллера:
– режим зарядки аккумулятора постоянным током заданного фиксированного значения;
– режим поиска экстремальной мощности солнечной батареи.
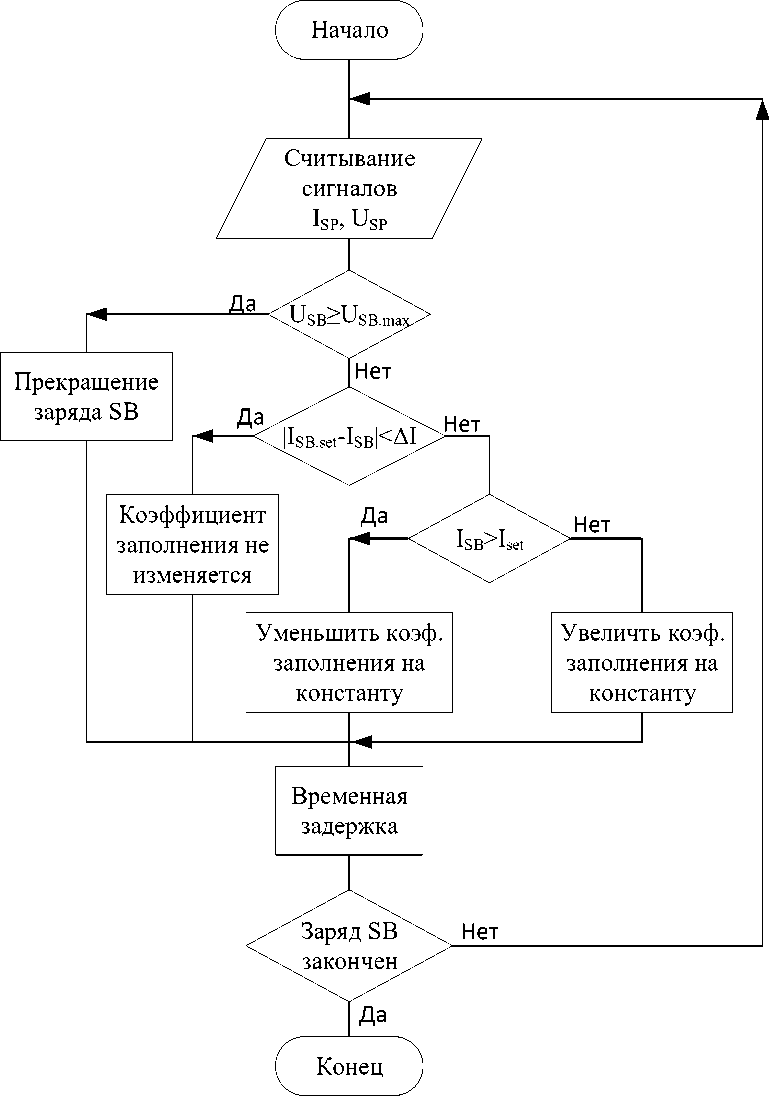
Рис. 2. Блок-схема алгоритма зарядки аккумулятора фиксированного тока
-
Fig. 2. Flowchart of the algorithm of specified fixed current battery charging mode
В соответствии с алгоритмом контроллер SP считывает сигналы напряжения и тока батареи, после чего проверяется условие достижения максимального значения напряжения заряда. Если это условие выполнено, контроллер SP отключает батарею от источника энергии. Если условие не выполняется, то проверяется равенство текущего значения тока и установленного значения оптимального тока заряда. Если текущее значение тока находится в заданном диапазоне, то оно приравнивается к оптимальному зарядному току с некоторой ошибкой, тогда требуемое соотношение циклов остается постоянным. Если ток заряда меньше указанного с учетом погрешности, то коэффициент заполнения импульса увеличивается на определенную величину, в противном случае он уменьшается. Величина изменения коэффициента заполнения импульсов за один шаг алгоритма задается программно и не изменяется во время работы.
Если на первичном источнике обнаружен дефицит мощности, то контроллер SP выбирает предельную мощность солнечной батареи, функционирующей в соответствии с разработанным алгоритмом поиска предельной мощности. В этом режиме рабочая точка на характеристике мощности SP колеблется в ближайшем пределе к точке максимальной мощности. Для данного режима часть мощности SP, превышающая мощность, потребляемую нагрузкой, поступает на заряд батареи. На рис. 3 приведена блок-схема пошагового алгоритма работы контроллера в режиме поиска экстремальной мощности [16].
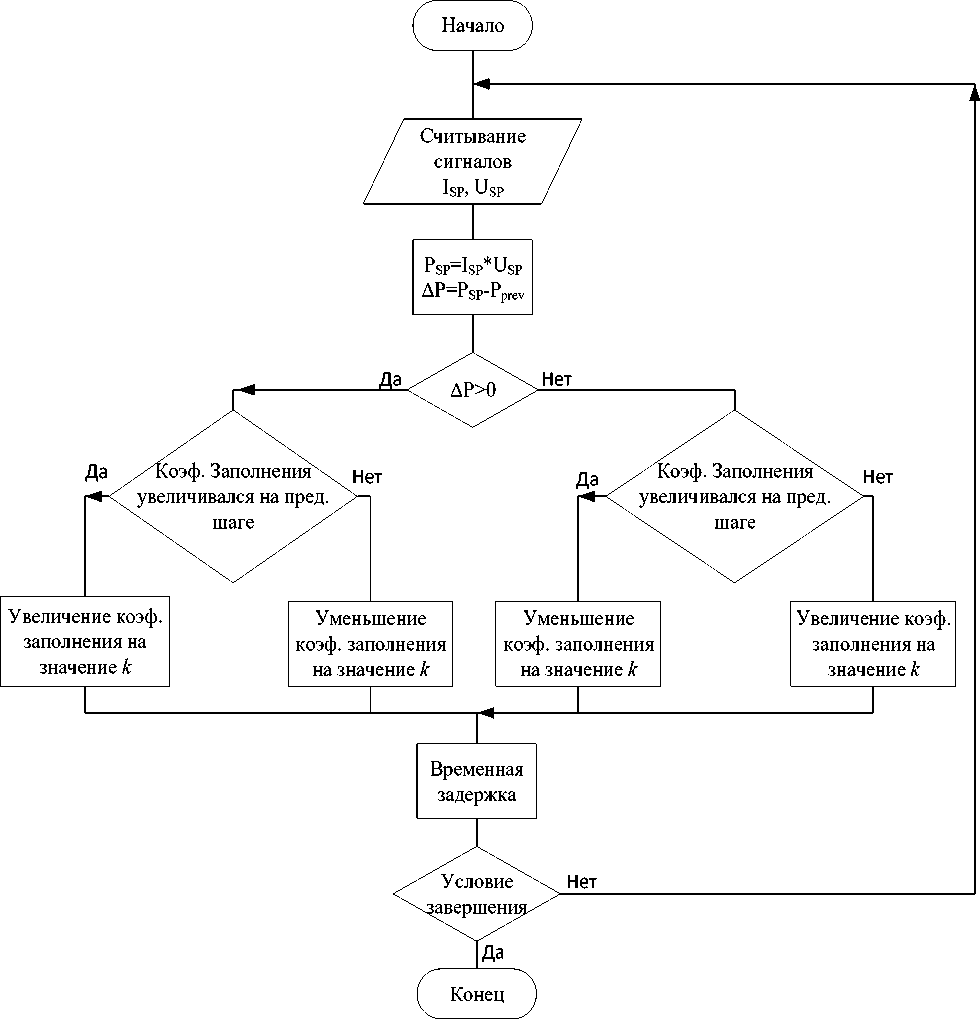
Рис. 3. Блок-схема алгоритма отслеживания точки максимальной мощности
-
Fig. 3. Flowchart of maximum power point tracking algorithm
В режиме поиска экстремальной мощности контроллер считывает сигналы тока и напряжения SP, а затем умножает их. Если сигналы измеряются впервые, то текущая мощность определяется как мощность, полученная от SP на предыдущем этапе. Затем определяется приращение коэффициента заполнения импульсов управления k , которое определяется контроллером на основе принципов нечеткой логики, затем вновь вычисляется текущая мощность SP. Если мощность увеличилась до значения, сравнимого со значением, сохраненным на предыдущем этапе, то коэффициент заполнения импульсов увеличивается. В случае, когда измеренная мощность уменьшается, направление движения рабочей точки изменяется в соответствии с характеристикой мощности SP и, следовательно, наблюдается уменьшение коэффициента заполнения импульсов управления.
Значение шага k в режиме поиска экстремальной мощности вычисляется блоком управления нечеткой логики [18–20], входные переменные которого являются производной мощности по напряжению dP / dV для одного шага поиска экстремума, а также абсолютное изменение мощности dP для этого шага. Нечеткие слагаемые значений шага k в зависимости от значений слагаемых входных переменных контроллера приведены в таблице.
Значения k ступенчатых членов в режиме отслеживания точки максимальной мощности
|
dP/dV dP |
NL (Negative large) |
NS (Negative small) |
NZ (Near zero) |
PS (Positive small) |
PL (Positive large) |
|
NL (Negative large) |
Highest |
High |
Middle |
High |
Highest |
|
NM (Negative moderate) |
High |
Middle |
Low |
Mode Middle rate |
High |
|
NS (Negative small) |
Middle |
Low |
Lowest |
Low |
Middle |
|
NZ (Near zero) |
Low |
Lowest |
Lowest |
Lowest |
Low |
|
PS (Positive small) |
Middle |
Low |
Lowest |
Low |
Middle |
|
PM (Positive moderate) |
High |
Middle |
Low |
Middle |
High |
|
PL (Positive large) |
Highest |
High |
Middle |
High |
Highest |
Выбор текущих режимов работы контроллеров SP определяется блоком управления режимами работы (USOM). Блок-схема алгоритма работы USOM контроллеров SP приведена на рис. 4.
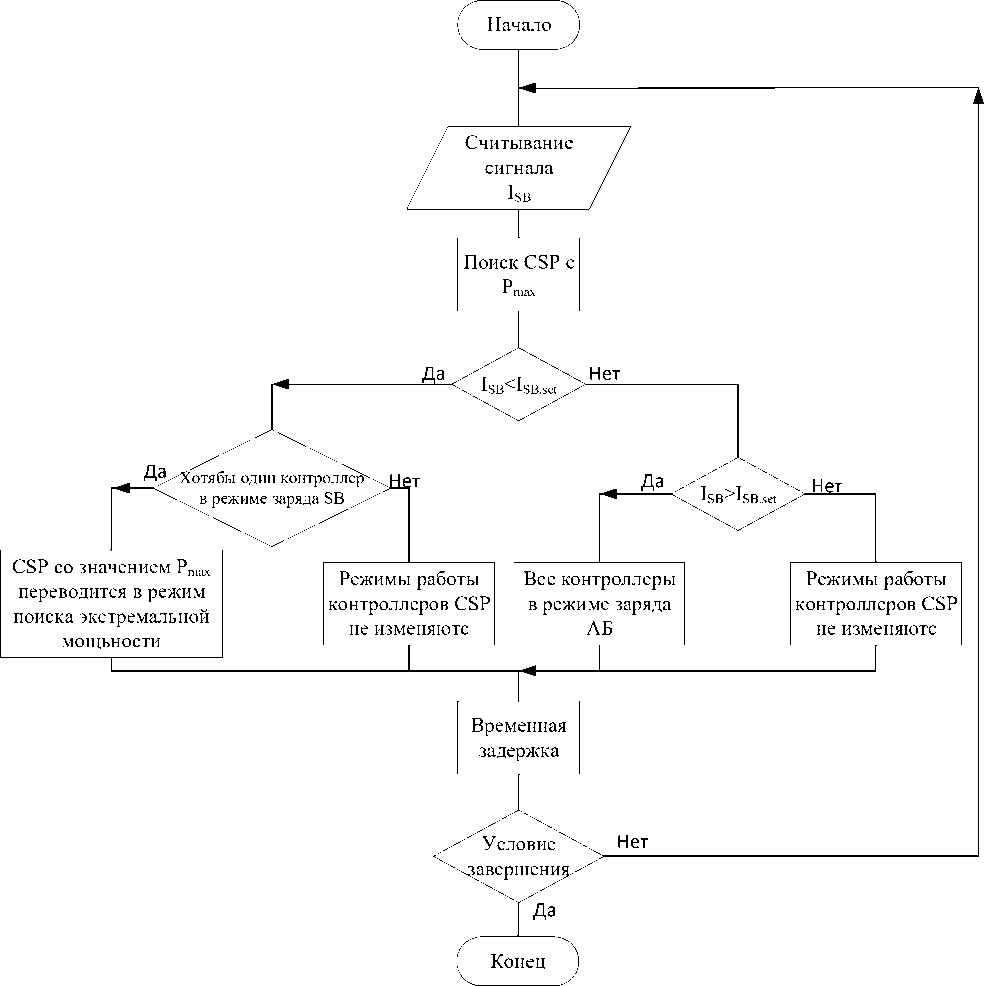
Рис. 4. Блок-схема алгоритма выбора режима работы контроллеров солнечных батарей
-
Fig. 4. Flowchart of solar controllers operation modes selection algorithm
Блок выбора режима на каждом шаге определяет SP-контроллер с наибольшим значением текущей мощности. Если выбранный SP-контроллер работает в режиме зарядки аккумулятора с фиксированным током, а текущее значение зарядного тока ISB меньше, чем указанный ISB.set, то этот контроллер переводится в режим поиска экстремальной мощности. Выбор SP-контроллера с наивысшим значением мощности обусловлен потенциально наибольшим увеличением тока, подаваемого на нагрузку, и зарядом батареи после переключения его в режим поиска экстремальной мощности. Это позволяет сократить время переключения режимов работы других контроллеров SP в случае перевода одного контроллера в режим поиска экстремальной мощности и достигает заданного значения зарядного тока ISB.set. Если контроллеры работают в режиме поиска экстремальной мощности, а значение тока зарядки ISB все еще меньше указанного ISB.set, то режим работы контроллера не изменяется, поскольку в этом случае невозможно обеспечить дальнейшее увеличение мощности. В случае, когда контроллеры SP работают в режиме поиска экстремальной мощности и значение зарядного тока ISB превышает установленное значение ISB.set, все контроллеры SP переключаются в режим зарядки аккумулятора с фиксированным током. Каждый цикл блока выбора режима заканчивается временной задержкой, необходимой для завершения переходных процессов после изменения режима работы контроллера SP.
Для отработки предложенных алгоритмов управления в среде MATLAB / Simulink была разработана имитационная модель системы электропитания с двумя первичными источниками, приведенная на рис. 5.
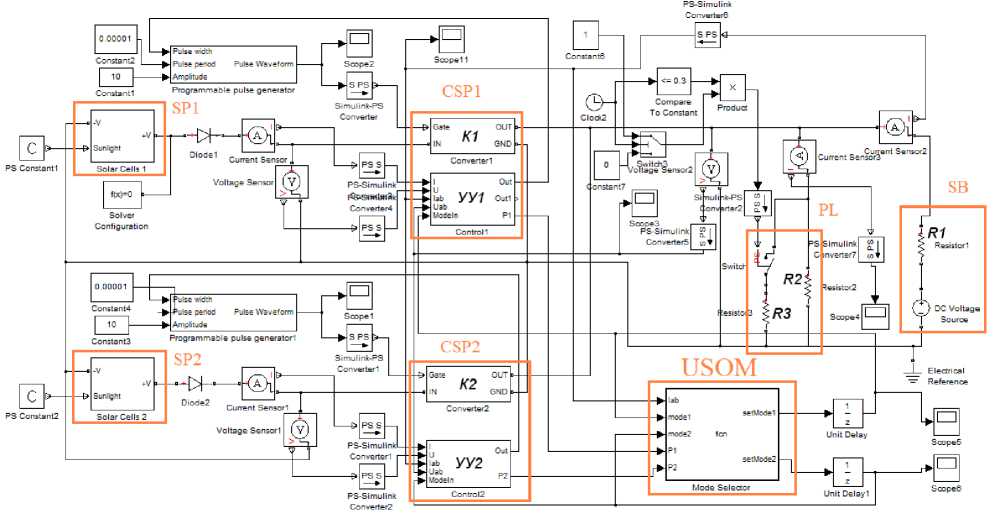
Рис. 5. Имитационная модель системы электроснабжения с двумя первичными источниками энергии
-
Fig. 5. Simulation model of the power supply system with two primary energy sources
Имитационная модель системы электропитания содержит два первичных источника энергии, реализованных на основе солнечных панелей SP1 и SP2, которые представляют собой несколько последовательно соединенных солнечных элементов из библиотеки компонентов Simscape [21]. SP1 и SP2 подключены к контроллерам CSP1 и CSP2, которые работают на общую нагрузку PL, реализованную в виде резисторов R2 и R3. Так же в состав модели включен аккумулятор SB с внутренним сопротивлением R1. Контроллеры SP состоят из блоков управления (CU1 и CU2) вместе с преобразователями напряжения CSP1 и CSP2 и представляют собой блоки, алгоритмы функционирования которых соответствуют алгоритмам управления, приведенным на рис. 2 и 3 соответственно. Преобразователи CSP1 и CSP2, входящие в состав контроллеров CSP1 и CSP2, имеют схемы понижающего преобразователя напряжения [4; 8; 13–16]. В свою очередь, USOM – это функциональный блок, который содержит m-код встроенной функции для среды Simulink [22]. На вход блока выбора режима поступают сигналы о текущем режиме работы каждого контроллера, текущих значениях мощности каждого источника энергии, а также текущем значении тока солнечной батареи ISB. Программа функционирования USOM реализована в соответствии с блок-схемой, приведенной на рис. 4.
Сравнительные результаты и анализ работы алгоритмов поиска экстремальных мощностей с фиксированным и переменным шагом приведены на рис. 6.
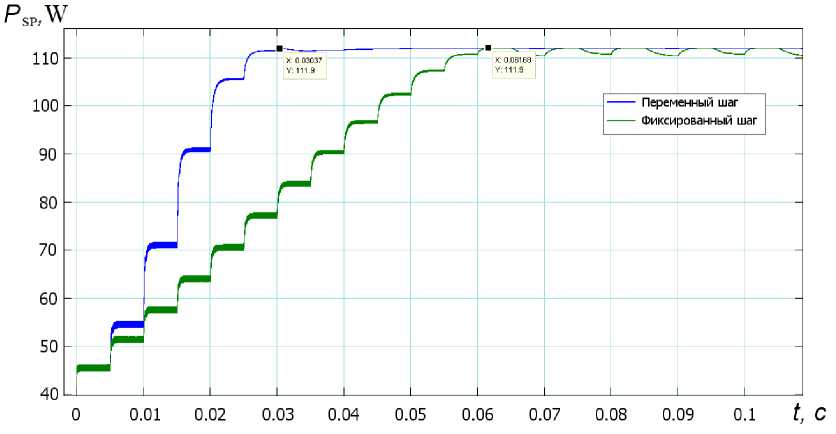
Рис. 6. Изменение мощности солнечной панели в режиме отслеживания точки максимальной мощности
-
Fig. 6. Change in solar panel power in the maximum power point tracking mode
Анализ временных диаграмм работы алгоритма поиска экстремальной мощности показал, что использование переменного шага в алгоритме, основанном на нечеткой логике, повышает скорость поиска точки максимальной мощности на 50,8 %. Алгоритм поиска экстремальной мощности с переменным шагом, разработанный с использованием нечеткой логики, также снижает недоиспользование мощности SP, вызванное колебаниями рабочей точки относительно точки максимальной мощности SP, на 2,8 %.
На рис. 7 приведены временные диаграммы функционирования аккумуляторной батареи I SB и демонстрируется процесс изменения режимов работы контроллеров SP.
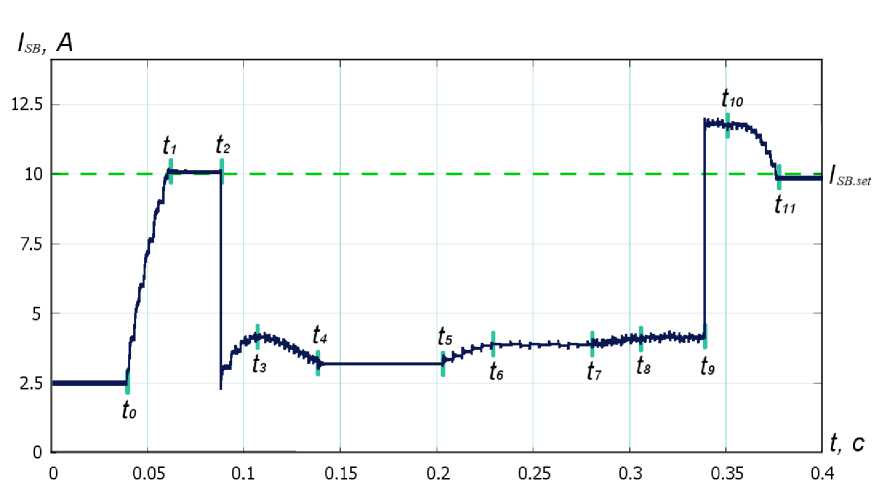
Рис. 7. Изменение тока батареи в процессе переключения режимов работы солнечных контроллеров
-
Fig. 7. Change in battery current in the process of solar controllers modes switching
В интервале времени от t = 0 до t0 контроллеры системы электропитания не изменяют коэффициент заполнения управляющих импульсов преобразователей и ток заряда батареи ISB остается постоянным. В момент времени t0 оба контроллера энергосистемы переводятся в режим зарядки аккумулятора с заданным фиксированным током. В это время происходит постепенное увеличение коэффициента заполнения управляющих импульсов, что приводит к увеличению тока ISB до значения оптимального зарядного тока ISB.set = 10 А. В момент времени t1 происходит процесс увеличения коэффициента заполнения импульсов, так как значение зарядного тока ISB становится равным ISB.set с некоторой предопределенной ошибкой. В момент времени t2 подключается дополнительная нагрузка, что приводит к скачкообразному увеличению тока нагрузки и уменьшению тока зарядки ISB, после чего контроллер начинает процесс увеличения коэффициента заполнения импульсов для достижения заданного оптимального значения ISB.set с зарядным током. В момент времени t3 рабочие точки характеристик солнечных элементов SP1 и SP2 расположены вблизи точки максимальной мощности, но контроллеры в соответствии с алгоритмом управления продолжают процесс увеличения коэффициента заполнения импульсов до момента времени t4, когда наблюдается максимальное значение коэффициента заполнения. Поскольку оптимальное значение зарядного тока ISB.set = 10 A не было достигнуто во время работы алгоритма режима зарядки SB, в момент времени t5 контроллер SP с наибольшим значением текущей мощности (в данном случае SP1) переключается в режим поиска экстремальной мощности и рабочая точка на силовой характеристике SP1 начинает двигаться к точке максимальной мощности солнечной батареи. К моменту времени t6 рабочая точка на характеристике SP1 достигает окрестности точки максимальной мощности, что, однако, не приводит к достижению заданного оптимального значения ISB.set зарядного тока ISB. Кроме того, в момент времени t7 контроллер SP с более низким значением текущей мощности (SP2) переключается в режим поиска экстремальной мощности и рабочая точка на характеристике SP2 начинает двигаться к точке максимальной мощности. К моменту времени t8 рабочая точка на характеристике SP2 достигает окрестности точки максимальной мощности. В момент времени t9 дополнительная нагрузка отключается, что приводит к скачкообразному уменьшению тока нагрузки и увеличению тока зарядки ISB. В момент времени t10 блок выбора режима в соответствии с алгоритмом работы переключает оба контроллера в режим зарядки аккумулятора с фиксированным током, после чего начинается процесс уменьшения коэффициента заполнения импульсов для достижения указанного оптимального значения ISB.set по зарядному току. К моменту времени t11 зарядный ток ISB батареи снова достигает своего оптимального значения ISB.set = 10 А с некоторой предопределенной ошибкой.
Заключение.
-
1. Показана возможность эксплуатации нескольких источников и накопителей электроэнергии в составе единой автономной системы электроснабжения. Представлено решение проблемы организации их согласованной работы, что позволяет организовать более эффективные в сравнении с известными режимы эксплуатации и обеспечить снижение расхода энергии от возобновляемых источников энергии.
-
2. Разработана модель системы электроснабжения, включающая два источника энергии с различными характеристиками. При избытке мощности, генерируемой первичным источником энергии, контроллер источника энергии работает в режиме зарядки аккумулятора с заданным фиксированным током. В случае дефицита мощности первичного источника питания контроллер работает в режиме поиска предельной мощности. Структура системы электроснабжения позволяет независимо работать двум источникам энергии. Таким образом, контроллеры источников энергии могут работать в различных режимах, обеспечивая повышенную гибкость системы электропитания, при этом использование алгоритма управления на основе нечеткой логики повышает скорость поиска точки максимальной мощности, а также повышает точность расчетов при функционировании алгоритма.
-
3. Экспериментальное исследование разработанной модели подтвердило работоспособность алгоритмов управления контроллерами солнечных батарей во всех режимах работы. Продемонстрирована эффективность алгоритмов выбора режимов работы контроллеров в различных условиях. Определено, что разработанные алгоритмы обеспечивают эффективное регулирование мощности первичных источников энергии в зависимости от различных условий работы автономных систем энергоснабжения.
Список литературы Обеспечение экстремального регулирования мощности первичных источников энергии при их совместной работе на общую нагрузку
- Wu B., Zhuo F., Long F., Gu W., Qing Y., Liu Y. A management strategy for solar panel - battery - super capacitor hybrid energy system in solar car. 8th International Conference on Power Electronics - ECCE Asia; 30 May-3 June 2011.
- Zhu, X., Guo, Z., Hou, Z., Gao, X. and Zhang, J. Parameter's sensitivity analysis and design optimization of solar-powered airplanes. Aircraft Engineering and Aerospace Technology, 2016. Vol. 88 No. 4, pp. 550-560.
- Lawhorn D., Rallabandi Vandana., Ionel D. Power Electronics Powertrain Architectures for Hybrid and Solar Electric Airplanes with Distributed Propulsion. 2018 AIAA/IEEE Electric Aircraft Technologies Symposium (EATS); 12-14 July 2018.
- Dontsov O., Ivanchura V., Krasnobaev Y., Post. S. [Autonomous power supply system with extreme power control of primary energy sources]. Izvestiya Tomskogo politekhnicheskogo universiteta. Inzhiniring georesursov. 2016, Vol. 327, No. 12, P. 35-44 (In Russ.).
- Trends 2013 in photovoltaic applications. Survey report of selected IEA countries between 1992 and 2012. Available at: http://helapco.gr/pdf/IEA_PVPS_Trends_ Report_2013_v1_0_01 .pdf (accessed 15.09.2019).
- Lukutin B. Decentralizovannye sistemy elektros-nabzheniya s vetrovymi i solnechnymi elektrostantsiyami [Decentralized power supply systems with wind and solar power stations]. Tomsk, Tomsk Polytechnic University Publ., 2015, 100 p.
- International Renewable Energy Agency: Vision and Mission. Available at: http://www.irena.org/menu/ index.aspx?mnu=cat&PriMenuID=13&CatID=9 (accessed 16.09.2019).
- Soustin B. Sistemy elektropitaniya kosmicheskikh apparatov [Spacecraft power supply systems]. Novosibirsk, Nauka Publ., 1994, 318 p.
- Fortescue P., Swinerd G., Stark J. (Eds.). (2011, August). Spacecraft Systems Engineering, (4th ed.). John Wiley & Sons, Ltd, 2011, 691 p.
- Norton C., Pellegrino S., Johnson M. (2014, July) Small Satellites: A Revolution in Space Science. Available at: http://www.kiss.caltech.edu/study/smallsat/KISS-SmallSat-FinalReport.pdf (accessed 21.09.2019).
- Makridenko L., Boyarchuk K. Mikrospuntniki. Tendentsiya razvitiya. Osobennosti rynka i sotsialnoe znachenie [Microsatellites. Development trend. Market characteristics and social impact]. Available at: http://jurnal.vniiem.ru/text/102/2.pdf (accessed 24.09.2019).
- The development of microprocessor technology. The structure and mode of modern microprocessors. Available at: http://life-prog.ru/view_articles.php?id=334 (accessed 24 .09.2019).
- Shiny akov Y., Otto A., Osipov A., Chernaya M. Autonomous power plant with extreme step regulator of solar battery power. Alternative Energy and Ecology. 2015, No. (8-9), P. 12-18.
- Ivanchura V. I. [Solar cell controller with maximum power point tracking]. Elektromekhanicheskie preo-brazovateli energii. VI Mezhdunarodnaya nauchno-tekhnicheskaya konferentsiya [Electromechanical energy converters. VI International research conference]. ^msk, 9-11 October 2013. Vol. 6, P. 180-185 (In Russ.).
- Post S., Dontsov O., Ivanchura V., Krasnobaev Yu. [A simulation model of the solar cell controller]. Izvestiya Tomskogo politekhnicheskogo universiteta. Teknhika i tekhnologiya v energetike. 2014, Vol. 325, No. 4, P. 111-120 (In Russ.).
- Dontsov O., Ivanchura V., Krasnobaev Y. (2015, Sep 9th). A Fuzzy Logic Solar Controller with Maximum Power Point Tracking. Journal of Siberian Federal University. Engineering & Technologies. 2015. Vol. 6, No. 8, P. 786-794.
- Liu C. An Asymmetrical Fuzzy-Logic-Control-Based MPPT Algorithm for Photovoltaic Systems. Energies. 2014, Vol. 7, P. 2178-2193.
- Asai K. Prikladnye nechetkie sistemy [Apllied fuzzy systems]. Moscow, Mir Publ., 1993, 368 p.
- Leonenkov A. Nechetkoe modelirovanie v srede MATLAB i fuzzyTECH [Fuzzy systems simulation in MATLAB and fuzzyTECH software]. Saint-Petersburg, BKV-Petersburg Publ., 2005, 736 p.
- Shtovba S. Vvedenie v teoriyu nechetkikh mnoz-hestv i nechetkuyu logiku [An introduction to fuzzy set theory and fuzzy logic]. Available at: http ://matlab. exponenta.ru/fuzzylogic/ book 1/index.php (accessed 3.10.2019).
- Ibbini M. Simscape solar cells model analysis and design. Computer Applications in Environmental Sciences and Renewable Energy. Kuala Lumpur, 2014, P. 97-103.
- Schematic simulation in the Simscape and SimE-lectronics software. Available at: http://www.kit-e .ru/articles/circuit/2014_4_ 174 .php (accessed 3.10.2019).
