Обеспечение электромеханической совместимости в частотно-регулируемых асинхронных электроприводах при регулировании частоты ШИМ

Автор: Татаринов Денис Евгеньевич, Григорян Анаит Сергеевна, Пименова Ирина Александровна
Журнал: Вестник Южно-Уральского государственного университета. Серия: Энергетика @vestnik-susu-power
Рубрика: Электромеханические системы
Статья в выпуске: 1 т.16, 2016 года.
Бесплатный доступ
Рассмотрены вопросы обеспечения электромеханической совместимости в асинхронных электроприводах. Для исследования электромеханических процессов в системах с автономными ШИМ-инверторами напряжения и асинхронными двигателями разработана компьютерная модель привода. Расчеты на модели показали, что непрерывное изменение частоты опорного напряжения инвертора во времени позволяет на порядок уменьшить амплитуды высших гармоник тока и электромагнитного момента двигателя при их неизменных коэффициентах искажения. Вследствие уменьшения амплитуд гармоник момента происходит снижение вибраций электропривода. Потери в двигателе изменяются незначительно. Изменение частоты опорного напряжения в заданном диапазоне частот не должно осуществляться с частотой питающих двигатель токов.
Автономный инвертор напряжения, асинхронный двигатель, широтно-импульсная модуляция, частота опорного напряжения, высшие гармоники, пульсации электромагнитного момента, электромеханическая совместимость
Короткий адрес: https://sciup.org/147158345
IDR: 147158345 | УДК: 621.314.263 | DOI: 10.14529/power160112
Provision of electromechanical compatibility of variable-frequency asynchronous drives with PWM-frequency regulation
Provision of electromechanical compatibility of asynchronous drive is considered. A computer drive model has been developed to investigate electromechanical processes in systems with PWM-inventors and asynchronous motors. Model calculations show that continuous change in the reference voltage frequency enables a multiple decrease of the amplitude of higher harmonics and electromagnetic torque with constant distortion factor. Vibrations of the electric drive may be decreased due to the reduced amplitudes of the torque harmonics. Motor losses change insignificantly. Variation of the reference voltage frequency within the given range should not to be implemented with frequency of motor supply currents.
Текст научной статьи Обеспечение электромеханической совместимости в частотно-регулируемых асинхронных электроприводах при регулировании частоты ШИМ
П ри ра боте полу п ров одн ик ов ых пре обра зов ателей (ПП) с ов м е с тно с эле ктриче ским и м а ш и нами в напряж ен ия х и тока х в оз ни ка ют иска ж ен ия, о б ус л овл енные ком му та ц ией полу пров од н иков ы х приборов [1]. Эти ис ка ж ен ия в ыз ыв ают до полн ител ь ные поте ри э не рги и в п ров одн иках и м аг ни топров ода х , пр ив одя т к пов ы ше ни ю п у л ьс ац ий э л е ктрома гн ит ного м о м е нта , у ве л ичени ю уровня в озду шн ого ш ум а и появл ен и ю в и браци й, проявлению ре зон а н сов, ус коре н ном у с та рени ю из ол я ц ии обмоток, с окра ще ни ю с рок а с лу жбы и т. д. Таким о б ра зом , ис ка ж е н ия прив од ят к сн иж ени ю п оказател ей эл ектром а гни тно й и эл е ктром е х аниче ской совместимости [2–4].
И з в е с тны сх е м ные м е тоды борьбы с ис ка жени ям и напряж ени й и токов ПП. В в ыс оков ол ьтн ых системах используютс я много уровне в ы е ПП, в мощн ы х н из ков ол ь тны х с исте м а х – многотактные П П; , пр и м ен яю тся дрос с е ли, с и н у с ные фи л ьтры, др уг ие т и пы фи л ьтров [5]. У ка з а н ные ре ше н ия поз в ол яю т с уще ств енно у лу чши ть с ов м е с тим ос ть П П с А Д и др уг им и эл е м ен та м и с исте м , но приводят к усло жнени ю си с те м , ув ел ичен ию их сто имости.
Известны методы улучшения качества выходного напряжения ПП средствами управления. Один из методов заключается в повышении частоты ШИМ. Это позволяет уменьшить амплитуду пульсаций токов и снизить потери энергии в машинах [6–9], но увеличивает потери в ПП. В трехфазных автономных инверторах напряжения (АИН) для улучшения гармонического состава выходного напряжения и уменьшения напряжения звена постоянного тока в напряжения управления вводятся составляющие нулевой последовательности [5]. Аналогичные результаты достигаются при реализации векторной ШИМ [10, 11]. Известны и другие варианты реализации ШИМ в ПП.
В данной публикации рассмотрен алгоритм управления АИН на примере тягового электропривода самосвалов БелАз грузоподъемностью 136 т. Привод содержит АД и АИН. Результаты анализа привода при постоянной частоте ШИМ в АИН опубликованы в [8]. Приведенные ниже исследования отличаются тем, что частота ШИМ переменная.
Схема, модель и параметры тягового привода
Схема транзисторного преобразователя с АД, представленная на рис. 1, содержит АИН и асинхронный двигатель с короткозамкнутым ротором ТАД-5.
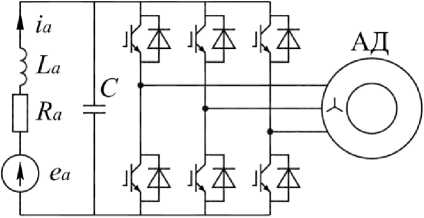
Рис. 1. Схема транзисторного преобразователя с АД
Для упр о щ е ни я р а сч ет ов, в с вя з и с от с ут с твием вл ия ния в ход н ог о п р ео б р аз о ват е л я н а выхо дн о й , п ер в и чн ый п р ео б р азователь н е р а ссмат ривается и п р ед с т ав л ен зве н о м п о ст оянн о г о т ок а. Инвер т о р пи т ае т с я о т и ст о чни ка п о с то я нн о г о нап ря ж ения e a c индуктивностью L a , а кт и в н ы м соп р о ти в ле ни ем R a и током ia . На пряж е н ие п ит а ни я А И Н 1000 В. Ис сл е дов ани я в ыпо л н е н ы пр и н ом и на л ьн ых па р аметрах двигателя, указанных в [ 8 ]: напряжение питания 660 В, 29 Г ц , мощн ость 625 кВт, коэффи циент м ощнос т и 0, 839, скол ьж е н ие 1, 25 %, индуктивность рассеяния статора 0,2139 мГн, индуктивность намагничивания 6,4215 мГн , и нд у к ти в ность рассеяния ротора 0,0963 мГн, акт ивное с опроти вление статора 9,6484 м О м , а кти в ное с опрот ивление ротора 5,8475 мОм, КПД = 0, 94, ин д у кт и в нос ть с г л а жив а ю ще го дрос с е л я 220 мкГн, емкость фильтрового конденсатора 20 мФ.
Для рассматриваемой схемы преобразователя и двигателя разработана компьютерная модель привода в MatLab-Simulink, представленная на рис. 2 и 3. Изменение параметров Т-образной схемы замещения компьютерной модели АД не учитывается. Сопротивления обмоток приняты для нагретого состояния двигателя. Адекватностью предложенной модели может служить сравнение ее с другими моделями. Такие сравнения осуществлялись и представлены в [8]. Модель электропривода содержит: источник питания, представленный звеном постоянного тока (ЗПТ); автономный инвертор напряжения (АИН), содержащий трехфазный транзисторный мост по схеме Ларионова, систему управления инвертором (СУ), формирующую импульсы управления (VT1…VT6) транзисторами (К1…К6), блок задания (БЗ), формирующий управляющие напряжения Uу = х]3Uф/Udc (о.е) и реализующий частотный закон управления для данного типа нагрузки; асинхронный двигатель (АД); датчики напряжения и тока (Uab, Ia); блок
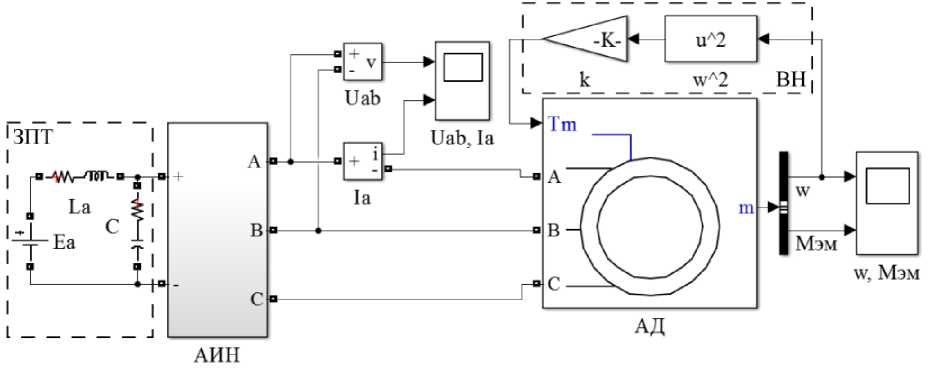
Рис. 2. Схема модели привода с АИН и АД
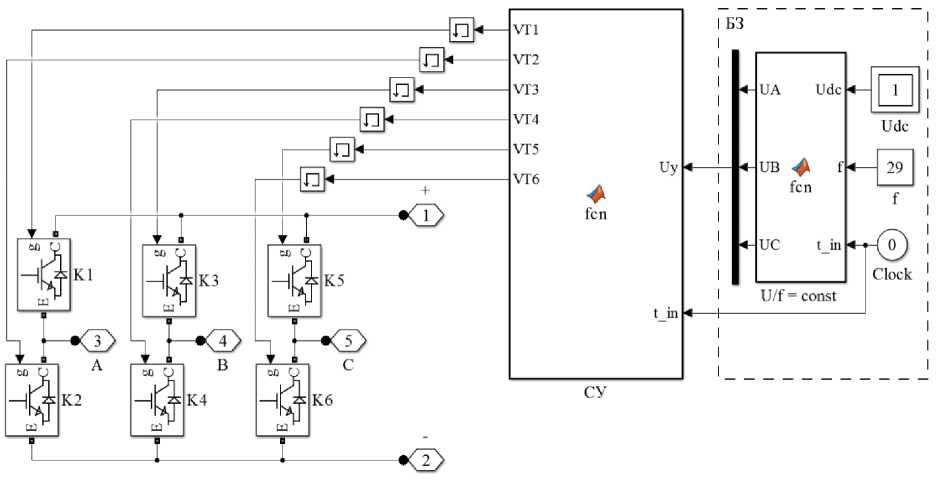
Рис. 3. Схема блока АИН
р е а л из а ц и и в ент иляторной н агр узки (ВН), на вх од которого поступ а е т с иг на л ча с тоты в ра ще н ия (w, р а д / с ) , а на в ых оде ра с с читыв а е тс я з а дание м ом ента сопротивления (Tm, Н∙м).
Для п о в ы ш е ни я э ф ф е кт ив н ости и с п оль зо в ания входн о г о н а п р яже ни я А И Н в н а п р яже ни я упр ав лени я в н о с я т с я со ст а в ляю щие нуле вой п о с лед ов ательности [5 ] . О соб е нн о ст ь СУ ин верт о р а за к л ю ч ает ся в и сп оль зовании п ер е менн о й ч ас т о т ы Ш И М . И змен е ни е ч ас т о т ы о п о рн ог о н ап ря ж ения Ш И М о су щест вл я ется п о с ледующи м ф о р мулам:
есл и f оп < f min , то k = 1;
есл и f on > f max , то k = — 1; f ' = 2 D^; T v ar = 1/ f ^ ; f on = f on, t + k • f '-A t ;
f min f o п_ср
—
A f ;
max
f =f +Af , max оп_ср max где k – коэффициент, определяющий знак
произ-
в одной из м ене н ия ча ст оты опорн ого на пряж ени я; f оп – ча с тота опо рного н ап ряж е н и я на тек у ще м шаге расчетов, Гц; f оп, t – ч ас тота опорного на пр яжения на предыдущем шаге, Г ц ; f оп_ср – средняя
частота опорного напряжения, Г ц ; Δ f max
–
макси-
ма л ьное от кл онен ие ча с тот ы от с ре д не го з на ч е-
ния, Гц; f ’
–
произ в одна я из м е не н ия час тоты
опорного напряжения, Гц/с; D – диа па з он из м енения частоты, Гц; T var – пе риод из м ен е н и я ча с тоты опорного напряжени я в д и а па з оне D , с; Δ t – шаг интегрирования, с.
Расчеты электромагнитных процессовв системе с ШИМ-инвертором
На компьютерной модели привода исследовано влияние амплитуд высших гармоник выходных напряжений и токов АИН на пульсации электромагнитного момента АД при постоянной и переменной частоте ШИМ.
Расчеты выполнены при постоянной частоте ШИМ 2000 Гц, а также при переменной частоте ШИМ в диапазоне 1500–2500 Гц при различных значениях периода ( T var = 1/ f var ) изменения частоты опорного напряжения в заданном диапазоне. Результаты расчета установившегося режима работы привода при переменной частоте ШИМ представлены на рис. 4, при f var = 70 Гц.
Как видно из рис. 4, частота ШИМ на каждом шаге работы системы линейно возрастает, а при достижении уровня 2,5 кГц происходит ее снижение до уровня 1,5 кГц. Это отражается на форме опорного напряжения, а также на амплитуде высокочастотных пульсаций в электромагнитном моменте и токах фаз на выходе АИН. Изменение частоты опорного напряжения не влияет на форму основной гармоники напряжений, токов и электромагнитного момента электропривода.
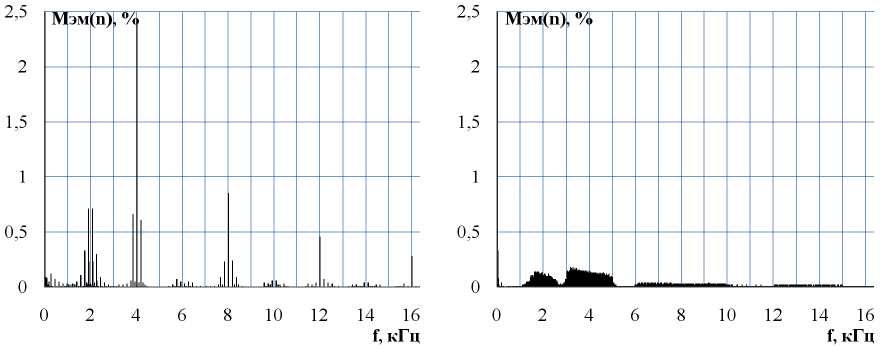
Известно, что при использовании переменной частоты ШИМ высшие гармоники напряжений и токов на частотах кратных частоте ШИМ (2, 4, 8, 12 кГц), преобразуются в широкий спектр гармоник со сравнительно малыми амплитудными значениями [1, 10]. Расчеты подтвердили данное утверждение и показали уменьшение амплитуды
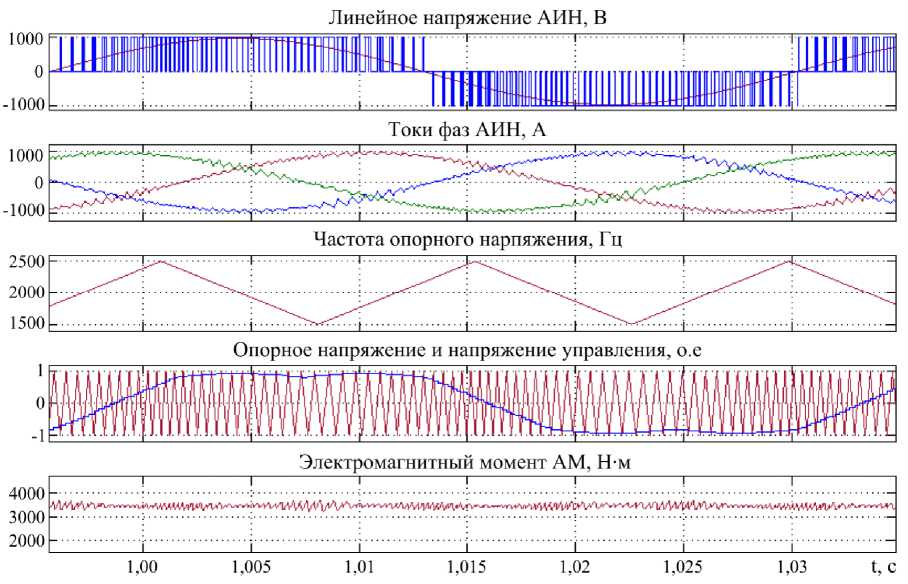
Рис. 4. Напряжения, токи и электромагнитный момент АД при переменной частоте ШИМ
наибольшей гармоники с 15до 2,5 % от основной со с т авл яющей д ля н ап ря ж е н и я и с 2 до 0,5 % для тока.
На рис. 5 представлены спе к тр ал ьн ые сост ав ы э ле к т р ом аг нитно г о мом ен та А Д , по лученные п ри постоянной и переменно й част от ах Ш ИМ, от об раж ающ ие сн и ж е н и е ам п л итуд высоко ч а ст о тн ы х г армон ик в э лек т р ом аг нитн о м м о мент е А Д .
Р ассм ат ри в аем ый ал г о ри тм уп рав л ения АИН с ис п оль зован и ем пер е менной част от ы Ш ИМ позволя ет улу ч шит ь ус ло ви я р або ты А Д и дру г и х силовых элементов, вход ящ и х в со став э ле кт р оп ри в о да. В ч аст н ости, у м е н ь шени е в ысш и х г ар мон и к т о ко в по зволя ет сн из и ть ур о в ни п ул ь са ц и й э ле к т р ом аг нитно г о моме н т а АД и ви б раций др о сселя ориентировочно в 6–17 раз.
Диапазон изменения частоты опорного напряжения выбирался из условия допустимых потерь в силовых транзисторах АИН и в АД [5, 8]. Также от этого диапазона зависит уровень амплитуд высших гармонических составляющих в электромагнитном моменте на частотах ШИМ и кратных ей. Увеличение диапазона частот, в котором изменяется частота опорного напряжения, приводит к уменьшению уровня амплитуд высших гар- моник, в связи с их непрерывным распределением по частотам в заданном диапазоне с меньшим уровнем.
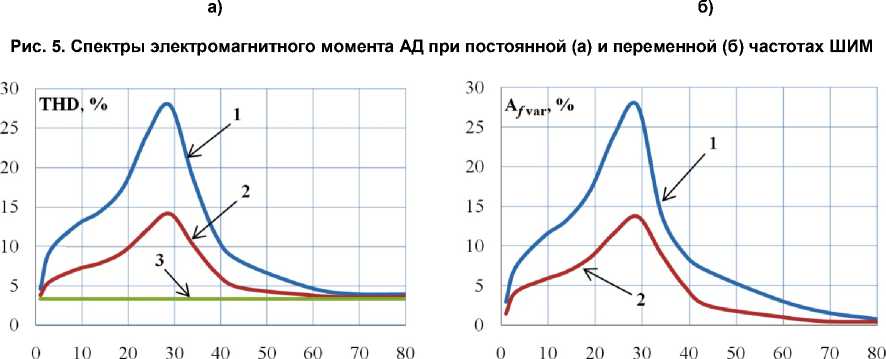
В результате проведенных исследований выявлен частотный резонанс, возникающий в случае совпадения частоты f var и частоты питающих двигатель токов, который приводит к сильному увеличению пульсаций электромагнитного момента. На рис. 6, а представлены зависимости коэффициента искажения электромагнитного момента, а на рис. 6, б зависимости амплитуды гармоники на частоте f var , вносимой в электромагнитный момент, от частоты f var.
На рис. 6 приняты следующие обозначения: для зависимостей при переменной частоте ШИМ: 1 – полученные при расчете управляющих напряжений один раз за период ШИМ, 2 – полученные при расчете управляющих напряжений два раза за период ШИМ; 3 – зависимость, полученная при постоянной частоте ШИМ.
Основное искажение в электромагнитный момент АД вносит амплитуда гармонической составляющей на частоте f var , создаваемая переменной частотой ШИМ. На рис. 6, б представлены зависимости амплитуды этой гармоники от частоты f var.
У van Г11 У var, Гц
а) б)
Рис. 6. Зависимости коэффициента искажения электромагнитного момента АД (а) и амплитуды гармоники на частоте f var , вносимой в электромагнитный момент (б), от частоты f var
а) б)
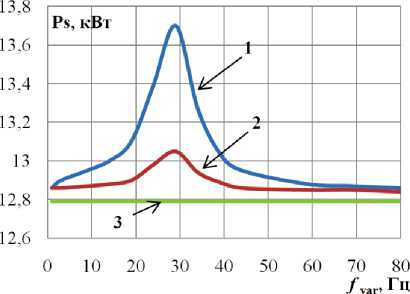
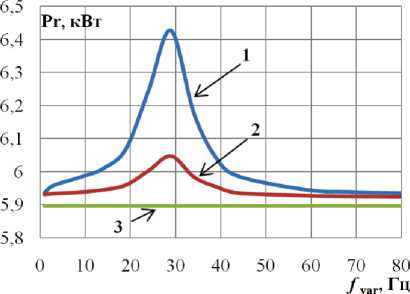
Рис. 7. Зависимости потерь энергии в активных сопротивлениях статора (а) и ротора (б) от изменения частоты опорного напряжения ШИМ
П о д ан ным з а висим ос тям м ож но с де л ать в ывод, что при приближении частоты f var к частоте питающих двигатель токов – а м пл и т у да га рм оник и на этой ча с тоте , в нос им ая в эл е ктром а гни тны й мом е нт, ре з ко в оз ра с та е т, что прив од ит к зна чител ь ному ув ел ичен ию п у льс а ци й эл е к тром а гнитного момента и, как следстви е , к у в е личе н ию е го коэффициента искажения (рис. 6 , а). Задание частоты f var вд в ое бол ь ше ча с тоты п ита ю щи х д в иг ател ь то ков , поз в оляе т из бе ж а ть в оз н ик нов е н ия частотного резонанса.
В процессе исследований было выявлено, чт о ф о рми р о ван и е у п р ав ля ю щ их н ап ряжен ий с ту п ен ч ат о й фу нк ци ей с д ли т е льн о ст ь ю ст уп ен и равн о й п о ло ви н е д л и т ельно ст и т акт а Ш И М поз во ля ет сн и зи т ь ампли туду г ар мо н и ч еск о й составляющей на частоте f var в э лек т р о маг н и т н о м моменте, вносящую в него с ущест венн ы е и ск аж ен и я , о р и ен т и р о во ч н о в 2 раз а ( зави си мо ст ь 2 рис. 6, б) и , к ак след ст ви е, у мень ши т ь пуль сац ии м о м ен т а в со о т вет ст в у ю ще м э к ви вален т е ( зависимость 2 рис. 6, а).
Дл я оц е н ки п оте рь эне рг ии в а к ти в ны х с опр отивл е н ия х об м оток с та тора и ротора двигателя ТАД- 5 п ри из м е нени и ча ст оты опорног о н а пряжени я в ып олне ны ра с че ты ном инал ьного ре жим а р а б оты д л я дву х в а р иа н тов форм иров а ния у пра вл яющ их н ап ряжен и й (1 и 2). Р е з у л ьтаты пре дс тавленные на рис. 7 (обозначения за вис им ос тей а н алогичны рис. 6), показыв а ют у в е личе н ие поте рь э н ерги и в акт ивных с опрот ивл е н ия х обм оток с татора и ротора в з оне ча стотн ого ре з она нс а на 7, 5 % (для зависимостей 1) и на 2,25 % (д л я з а в исим осте й 2) по отноше ни ю к з а в исим ос тям 3. При задании частоты f var в д в ое б ол ьше ча с тоты пи тающ и х двига тел ь ток о в, п оте ри с н иж а ю тся д о уров н я 0,6 и 0,4 % по отноше н ию к з а в ис им ос т ям 3.
Заключение
Результаты представленных исследований показывают, что рассмотренный способ управления АИН при изменении частоты ШИМ в заданных пределах с заданной периодичностью позволяет уменьшить амплитуды высших гармоник напряжений, токов и электромагнитного момента АД ориентировочно в 6–17 раз при распределении характерных гармоник по широкому спектру частот, тем самым обеспечивая снижение вибраций электропривода.
В данной публикации рассматривался алгоритм формирования напряжения АИН с переменной частотой ШИМ и его влияние на АД без системы управления выходными координатами АД. Было выявлено положительное и отрицательное влияние данного алгоритма на АД, в частности улучшение показателей электромагнитной и электромеханической совместимости, а также возможности возникновения частотного резонанса, приводящего к увеличению пульсаций электромагнитного момента АД. Предполагается, что данные пульсации возможно скомпенсировать векторной системой управления АД. Расчет потерь энергии в активных сопротивлениях обмоток двигателя при переменной частоте ШИМ показал их увеличение в зоне частотного резонанса на 2,25 и 0,4 % при задании частоты f var вдвое больше частоты питающих двигатель токов по отношению к алгоритму с постоянной частотой ШИМ.
Список литературы Обеспечение электромеханической совместимости в частотно-регулируемых асинхронных электроприводах при регулировании частоты ШИМ
- Зиновьев, Г.С. Основы силовой электроники/Г.С. Зиновьев. -Новосибирск: Изд-во НГТУ, 1999. -199 с.
- Васильев, Б.Ю. Электропривод. Энергетика электропривода/Б.Ю. Васильев. -М.: СОЛОН-Пресс, 2015. -268 с.
- Электрический привод. Термины и определения/С.К. Козырев, А.С. Анучин, А.Е. Козярук и др.; под ред. С.К. Козырева. -М.: Изд-во МЭИ, 2015. -96 с.
- Вершинин, В.И. Электромагнитная и электромеханическая совместимость в электротехнических системах с полупроводниковыми преобразователями/В.И. Вершинин, В.А. Загривный, А.Е. Козярук. -СПб.: Санкт-Петербургский горный институт, 2000. -67 с.
- Электроприводы и системы с электрическими машинами и полупроводниковыми преобразователями (моделирование, расчет, применение)/М.В. Пронин, А.Г. Воронцов, П.Н. Калачиков, А.П. Емельянов; под ред. Е.А. Крутякова. -СПб.: Силовые машины: Электросила, 2004. -252 с.
- Ruderman, A. Electrical Machine PWM Loss Evaluation Basics/A. Ruderman, R. Welch//EEMODS, 2005. Heidelberg, Germany.
- Пронин, М.В. Моделирование систем с асинхронными машинами и транзисторными преобразователями с учетом потерь энергии/М.В. Пронин, А.Г. Воронцов, В.В. Терещенков//Известия вузов. -2008. -№ 3. -С. 33-38.
- Pronin, M. Computer model-based evaluation of energy losses components in the systems with asynchronous machines and transistor converters/M. Pronin, O. Shonin, A. Vorontsov, V. Tereschenkov//The 33rd Annual Conference of the IEEE Industrial Electronics Society (IECON), 2007. Taipei, Taiwan.
- A Model of Semiconductor Converter-Fed Asynchronous Machines Taking into Account Energy Losses and Thermal Processes/M. Pronin, O. Shonin, Y. Koskin et al.//EPE-PEMC 2008, Poznan, Poland. -P. 852-859.
- Обухов, С.Г. Широтно-импульсная модуляция в трехфазных инверторах напряжения/С.Г. Обухов, Е.Е. Чаплыгин, Д.Е. Кондратьев//Электричество. -2008. -№ 7. -C. 23-31.
- Чаплыгин, Е.Е. Двухфазная широтно-импульсная модуляция в трехфазных инверторах напряжения/Е.Е. Чаплыгин//Электричество. -2009. -№ 8. -С. 56-61.
