Обеспечение точностных параметров движения звена промышленного робота в зоне малой скорости

Автор: Карнаухов Н.Ф., Смяцкий Д.А., Филимонов М.Н., Руднев К.И.
Журнал: Advanced Engineering Research (Rostov-on-Don) @vestnik-donstu
Рубрика: Машиностроение и машиноведение
Статья в выпуске: 4 т.19, 2019 года.
Бесплатный доступ
Введение. Рассматривается трение звеньев подвижности промышленного робота (ПР) производственного механизма (ПМ) с частотно-управляемым электроприводом (ЧУЭП). Цель работы - поиск метода снижения влияния такого трения на статическую погрешность (точность) позиционирования рабочего органа (РО) при движении в зоне малой скорости. Случайный характер изменения сил трения при реализации пуско-тормозных режимов работы асинхронного двигателя (АД) создают трудности в достижении заданных параметров технологического процесса. На валу АД формируются пульсирующие моменты, обусловленные гармониками тока статора АД. Это явление в сочетании с моментом трения подвижных звеньев в направляющих ПР (ПМ) сопровождается ухудшением динамики движения РО (выходного звена ПМ).Материалы и методы. Для корректировки движения РО (выходного звена ПМ) в пуско-тормозных режимах работы АД авторы статьи предлагают использовать двухрежимное управление автономным инвертором напряжения (АИН), обеспечивающее программное управление амплитудами гармоник тока статора АД и соответствующее регулирование пульсирующих моментов на валу АД посредством введения кратной m-подмодуляции несущей частоты (НЧ) АИН.Результаты исследования...
Промышленный робот, звено подвижности, сухое трение, частотный асинхронный электропривод, гармоники тока статора, микровибрация ротора, передаточное звено, автоматическая система управления
Короткий адрес: https://sciup.org/142221968
IDR: 142221968 | УДК: 62-83: | DOI: 10.23947/1992-5980-2019-19-4-342-348
Ensuring of the industrial robot link motion accuracy parameters in the low-speed zone
Introduction. The article is devoted to the search for a method of reducing the effect of friction links mobility industrial robot PR (production mechanism PM) with frequency-controlled electric drive (FCED) on the static error (accuracy) positioning of the working body (WB) when moving in a low speed zone. The random character of friction forces changes in the implementation process start-braking modes of induction motor (IM) operation create difficulties in performance specified technological process parameters. The formation of pulsating moments on the IM shaft, due to the stator IM current harmonics, combined with the friction torque of the moving parts in the IR (IM) guide, accompanied by a deterioration of the WB (IM output link) movement dynamics.Materials and Methods. To correction the motion of the WB (PM output link) in the IM start-brake modes, the authors proposed to use dual-mode control of the Autonomous voltage inverter (AVI), providing software control of the IM stator current harmonics amplitudes and the corresponding regulation of the pulsating moments on the IM shaft by introducing a multiple "m - submodulation" of the AVI carrier frequency (CF)...
Текст научной статьи Обеспечение точностных параметров движения звена промышленного робота в зоне малой скорости
1, 2, 3, 4Don State Technical University, Rostov-on-Don, Russian Federation
Введение. Рассматривается трение звеньев подвижности промышленного робота (ПР) производственного механизма (ПМ) с частотно-управляемым электроприводом (ЧУЭП). Цель работы — поиск метода снижения влияния такого трения на статическую погрешность (точность) позиционирования рабочего органа (РО) при движении в зоне малой скорости. Случайный характер изменения сил трения при реализации пуско-тормозных режимов работы асинхронного двигателя (АД) создают трудности в достижении заданных параметров технологического процесса. На валу АД формируются пульсирующие моменты, обусловленные гармониками тока статора АД. Это явление в сочетании с моментом трения подвижных звеньев в направляющих ПР (ПМ) сопровождается ухудшением динамики движения РО (выходного звена ПМ).
Материалы и методы. Для корректировки движения РО (выходного звена ПМ) в пуско-тормозных режимах работы АД авторы статьи предлагают использовать двухрежимное управление автономным инвертором напряжения (АИН), обеспечивающее программное управление амплитудами гармоник тока статора АД и соответствующее регулирование пульсирующих моментов на валу АД посредством введения кратной m-подмодуляции несущей частоты (НЧ) АИН.
Результаты исследования. Упрощенное представление структурной схемы ЧУЭП с местной и глобальной отрицательными обратными связями (ООС) позволило выявить особенности влияния конкретных параметров на статическую погрешность δ и динамическую устойчивость работы ЧУЭП с предельным коэффициентом усиления корректирующего усилителя К1.
Обсуждение и заключения. Введение микровибрации ротора АД позволяет условно уменьшать силу трения движущегося звена в направляющих, снижать мощность привода на преодоление сил трения. Применение АИН с двухрежимным управлением расширяет сферу использования ЧУЭП скалярного управления в технологическом оборудовании, многозвенных механизмах автоматизированных производств, работающих в зоне малых и ползучих скоростей.
Introduction. The article is devoted to the search for a method of reducing the effect of friction links mobility industrial robot PR (production mechanism PM) with frequency-controlled electric drive (FCED) on the static error (accuracy) positioning of the working body (WB) when moving in a low speed zone. The random character of friction forces changes in the implementation process start-braking modes of induction motor (IM) operation create difficulties in performance specified technological process parameters. The formation of pulsating moments on the IM shaft, due to the stator IM current harmonics, combined with the friction torque of the moving parts in the IR (IM) guide, accompanied by a deterioration of the WB (IM output link) movement dynamics. Materials and Methods. To correction the motion of the WB (PM output link) in the IM start-brake modes, the authors proposed to use dual-mode control of the Autonomous voltage inverter (AVI), providing software control of the IM stator current harmonics amplitudes and the corresponding regulation of the pulsating moments on the IM shaft by introducing a multiple "m — submodulation" of the AVI carrier frequency (CF).
Results. The simplified representation of the FCED block diagram with local and global negative feedbacks (GNF) allowed to reveal the features of specific parameters influence on the static error δ and the FCED dynamic stability with the limiting gain of the corrective amplifier K1.
Discussion and Conclusions. The introduction of rotor "microvibration", allows the IM "conditionally reduce" the moving link friction force in the guides, reduce the drive power to overcome the friction forces. The use of dual-mode control AVI expands the scope of use of scalar control in process equipment, multi-link mechanisms of automated production, operating in the zone of "low and creeping speeds".
Работа выполнена в рамках инициативной НИР.
∗∗∗ The research is done within the frame of the independent R&D.
Образец для цитирования: Обеспечение точностных па- For citation: N.F. Karnaukhov, et al. Conditioning of the in-раметров движения звена промышленного робота в зоне dustrial robot link motion accuracy parameters in the low- малой скорости Н. Ф. Карнаухов [и др.] Вестник Донско- speed zone. Vestnik of DSTU, 2019, vol. 19, no. 4, pp. 342-348.
го гос. техн. ун-та. — 2019. — Т. 19, № 4. — С. 342-348.
Введение. Наиболее важные технические параметры промышленного робота (ПР) связаны с выполнением транспортных и технологических операций. При этом учитывается программируемая точность движения рабочего органа (РО), необходимая при сборке соединения, обработке детали и выполнении специальных работ в производственных условиях и при чрезвычайных ситуациях. Достижение программируемой точности движения РО — обычная задача при проектировании кинематической цепи (КЦ) ПР или другого производственного механизма (ПМ), предназначенного для выполнения сложных движений РО кратчайшим, наиболее рациональным путем (например, при обработке, сборке, покраске изделия в условиях замкнутого пространства и других особых случаях, включая техногенные катастрофы). Такая точность ожидаема, если речь идет о ПР с повышенной маневренностью при семи и более степенях подвижности, обеспечиваемых различными сочетаниями звеньев и кинематических пар [1–3]. При этом в КЦ изменяются составляющие векторов сил реакций и моментов для систем координат, жестко связанных с подвижными звеньями. Здесь необходимо учитывать влияние сил трения во вращательных и поступательных кинематических парах (как отдельного звена, так и в целом многозвенного механизма), определяющих общее сопротивление движению РО ПР или ПМ. Силы трения в кинематических парах носят случайный характер, зависят от ряда факторов и определяют механический коэффициент полезного действия, динамику движения многозвенного механизма. Этим обусловлена актуальность поиска способа снижения влияния трения на основные потери в механизме и повышения качества движения РО. Такую задачу необходимо решать и в связи с тем, что указанные выше факторы препятствуют стабильноcти в отработке системой автоматического управления программируемого технологического режима работы ПР (или закона движения РО) в зоне малой скорости. Особое влияние сил трения проявляется в снижении точности позиционирования РО (как в дискретных, так и непрерывных технологических ПР) в виде погрешности отработки траектории движения многозвенного механизма. Дополнительно следует учитывать составляющие угловых и линейных погрешностей движения звеньев механизма. Они зависят от действительных значений сил (моментов) сухого трения в соединениях и носят случайный характер. Непредсказуемость влияния сухого трения на программируемый результат движения выходного звена ПР (ПМ) существенно ухудшает динамические процессы в частотно-управляемом электроприводе (ЧУЭП) и усложняет задачу коррекции нелинейностей его структурной схемы автоматической системы управления.
С целью уменьшения статической ошибки, обусловленной наличием сухого трения, используют известные подходы [4, 5], в частности:
Машиностроение и машиноведение
— местные отрицательные обратные связи (ООС), — увеличение коэффициента усиления предварительного усилителя (до критического значения всей системы с учетом ее порядка).
Реальное изменение сил (моментов) трения в соединениях многозвенного механизма ПР требует найти наилучшее решение по снижению влияния сухого трения на важнейшие показатели движения РО, на повышение энергоэффективности преобразования электрической энергии в системе частотного электропривода.
Основная задача авторов статьи — ознакомить читателя с возможностями управляемой микровибрации в соединениях трущихся звеньев ПР при особом управлении автономным инвертором напряжения в частотном электроприводе на базе трехфазного короткозамкнутого асинхронного двигателя (АД). Автономный инвертор напряжения АИН вводит режим m -подмодуляции несущей частоты — при этом программное влияние на уровень пульсирующего момента на валу АД позволяет менять величину М ТР , улучшать статические и динамические показатели ЧУЭП.
Материалы и методы. Авторы статьи видят решение проблемы в способе использования пульсирующих моментов на валу ротора АД, формируемых гармониками тока статора в схеме ЧУЭП. Такой подход позволяет управлять микровибрацией трущихся звеньев рассматриваемого механизма ПР. При этом в зонах малой скорости момент трогания подвижного звена ПР может программно изменяться до момента скольжения, что обусловлено уменьшением эффективного коэффициента трения Kэф до минимального уровня [5, 6]. Этого можно достичь, регулируя амплитуду пульсирующего момента на валу ротора АД и изменяя эффективный коэффициент трения KэФ при двухрежимном управлении АИН [7, 8].
Приведенные положения рассмотрены применительно к структурной схеме многозвенного механизма ПР (в любой системе координат), где можно выделить кинематическую пару горизонтального перемещения подвижного выходного звена РО — например, выдвижную руку c захватным устройством (ЗУ). Звено перемещает индивидуальный ЧУЭП, работающий по системе «АИН — АД» при двухрежимном управлении автономным инвертором напряжения (АИН) [9]. Обоснование возможности изменения силы трения в соединении звеньев (направляющих) можно получить в результате анализа расчетной модели ЧУЭП с выходным звеном подвижности РО ПР (или ПМ) и указанием сил, действующих на него (рис. 1).
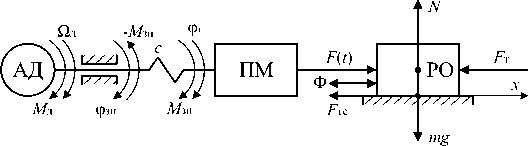
Рис. 1. Расчетная модель звена подвижности производственного механизма
В модели введены следующие обозначения: М д — момент двигателя; ^ д — скорость вращения ротора АД; c — жесткость соединения ПМ с АД; M ЗП — движущий момент на входе звена (момент сопротивления — минус M ЗП ) на валу АД; ф 1 — угол поворота входного звена ПМ (ПР); ф ЗП — угол поворота выходного вала АД; F ( t ) — суммарная (внешняя) движущая сила; F ТС — сила трения в направляющих; F Т — сила технологического сопротивления; N — сила нормального давления РО с массой m , Ф — вибрационная составляющая суммарной движущей силы F ( t ).
Уравнение движения звена ПР (ПМ) вдоль продольной оси х :
mx = F ( t ) - F T - F TC . (1)
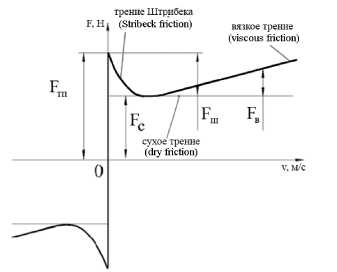
Сила трения F ТС в выражении (1) может быть представлена составляющими:
F TC = F TП = F in + F c , (2)
где F ТП — сила трения покоя, F Ш — сила трения Штрибека [10], F С — сила сухого трения.
Соответствующие этим понятиям графические зависимости приведены на рис. 2.
а)
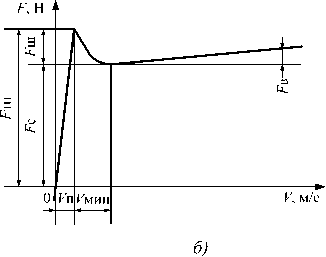
Рис. 2. Характеристики трения: а — с разрывом в окрестности нулевой скорости движения звена в направляющих, б — без разрыва в окрестности нулевой скорости
С учетом выражения (2), сила трения покоя FТП в условиях эксплуатации ПР может изменяться в широком диапазоне, т. е. FТП/FС ~ (0,1...2,5). В этом случае для сдвига РО значение внешней (суммарной движущей) силы F(t) должно соответствовать соотношению F(t) > FТП + FТ [10]. В действительности характер зависимости силы трения покоя FТП от скорости (V) перемещения звена подвижности (в зоне малой скорости) различен, и его целесообразно рассматривать на примере неразрывной функции (см. рис. 2, б). Здесь характер изменения силы трения FТП полностью отражает физические процессы в механическом контакте, распределенном в плоскости между телами — подвижными звеньями ПР, на малом участке скорости, где V ^ 0. Характеристика Штрибекова трения FШ имеет отрицательный наклон в зоне низких скоростей (VМИН — VП) относительного перемещения трущихся тел. Сумма сил FШ + FС на границе диапазона (0 — VП) малой скорости (или в окрестности линейной нулевой скорости) образует силу трения покоя FТП («силу трения срыва») [11-13]. Для нарушения состояния относительного покоя твердого тела (в соединениях, направляющих движения) часто используют вибрации тела. Их обеспечивает внешняя сила F(t) > FТП, обусловленная пульсирующими моментами от гармоник на валу АД [14-17]. Если использовать двухрежимное управление АИН в упрощенной структурной схеме ЧУЭП (рис. 3) с обратной связью по скорости, то можно программно задавать управляемую микровибрацию ротора АД, формировать продольную (поперечную) пульсирующую силу Ф или вибрационную составляющую (см. рис. 1) суммарной движущей силы F(t).
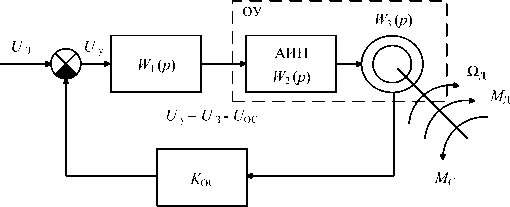
Рис. 3. Упрощенная структурная схема ЧУЭП звена подвижности ПМ
На рис. 3 приняты следующие обозначения: U З — сигнал задания на управление выходной координатой; W 1 ( р ), W 2( р ), W 3 (р ) — передаточные функции соответственно корректирующего усилительного звена (устройства), автономного инвертора АИН, асинхронного двигателя АД; K ОС — коэффициент передачи звена обратной связи по скорости; U ОС — сигнал обратной связи по скорости; О д — угловая скорость вращения ротора АД; M д , M С — моменты движущих сил и сил сопротивления на валу АД соответственно, включая момент трения М ТР .
Результаты исследования. Замкнутые системы автоматического управления (САУ), охваченные ОС, склонны к неустойчивой работе [18]. Этим объясняется необходимость тщательного анализа параметров каждого элемента контура регулирования при поиске закона управления движением РО как передаточного звена, включая механические подвижные звенья с учетом составляющих момента трения М ТР (силы покоя F ТП и силы сухого трения F С ) [19]. В многозвенных механизмах с индивидуальным приводом М ТР может изменяться в широких пределах, что в целом усложняет систему. Можно улучшить качество переходного процесса в приводе, если включить звено с передаточной функцией W 0 ( р ) [4] и таким образом ввести местную ООС с выхода инерционного звена (АД) на его вход (рис. 4).
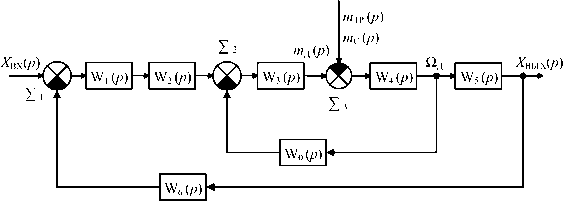
Рис. 4. Преобразованная структурная схема ЧУЭП звена подвижности ПМ
При глобальной ООС по скорости сигнал подается на вход корректирующего усилительного звена с передаточной функцией W 1 (р ) через сравнивающее устройство (узел S i ).
Выделив в структурной схеме прямой участок цепи системы управления c АД, охваченный звеном W0(р ) местной ОС, произведем замену его эквивалентным звеном с передаточной функцией [4, 19]:
W ( ) = W 4 ( Р ) • m ТР ( Р ) = W 4 ( Р ) • m ТР ( Р )
Р) 1 + w '( р ) 1 + W 3 ( р ) • w ,( р ) • w„( р ).
Здесь W’(p ) = W 3( р )• W 4 (р )• W 0( р ) — передаточная функция разомкнутой системы внутреннего контура. При одновременном воздействии всех возмущений (управление на входе и нагрузка при изменении т ТР ) результирующее значение W ВЫХ (р ) в линейной системе управления можно представить (по методу наложения) как сумму частных реакций от внешних воздействий.
Если принять соответствие входного сигнала Х ВХ ( р ) ^ f _ (р ) как задание частоты тока статора АД, а Х ВЫХ ( р ) ^ n д ( р ) — выходная частота вращения вала механизма, то можно записать результирующее операторное выражение относительно выходной величины в виде
X (Р) = вых
W ( Р ) • W ( р ) • W э ( Р ) • W 5 ( Р ) • W 6 ( Р )
1 + W ( р )
• f ( р ) +---- W 4 ( Р ) m ( Р )----,
1 у 1 + W , ( р ) • W , ( р ) • W )( р )
Машиностроение и машиноведение
где W(p ) = W i ( p )• W 2 ( p )• W Э ( p )• W 5( p )• W 6 ( p ) — передаточная функция разомкнутой системы внешнего контура.
При исследовании структурной схемы управления с заданными параметрами элементов силовой цепи можно использовать упрощенные соотношения для передаточных звеньев [20, 21].
— Передаточная функция АИН:
k ПР
T ПР ■ p + 1
где кПр — коэффициент передачи частотного преобразователя, кпр = ^ф; Tпр = —--постоянная времени тран-f 1 fк зисторного преобразователя частоты (АИН); fK — значение несущей частоты модуляции (3-50 кГц); U1ф, f1 — соответственно напряжение и частота тока фазы АД.
— Передаточная функция АД по управляющему воздействию:
f 1 ( p ) Т МЭ Т ЭМ p 2 + Т МЭ p + 1
где параметр f(р ) определяется из соотношения f = —^ Гц при расчетном диапазоне D — регулирования АД ; f 1Н — номинальная частота напряжения АД; к д — передаточный коэффициент АД; к д = 60/ p , где p — число пар полюсов АД.
— Передаточная функция асинхронного двигателя по возмущающему воздействию от статического момента т C нагрузки:
' , ( Т ЭМ p + 1)
n д ( p ) 2 п к жэ
W3 (p) =--=.
m с (p ) т мэ т эм p + т мэ p + 1
Здесь
3U12ф p2 ■ f kжэ =---------------№,
4 f 2 п2 [( R 1 + Д„6 + ) + X К ]
S 2
где R ‘2 — приведенное активное сопротивление ротора к статору; S — расчетное скольжение; X К — суммарное индуктивное сопротивление статора и ротора; R 1 — номинальное активное сопротивление фазы обмотки статора АД; R 1доб — расчетное активное сопротивление обмотки статора АД в режиме коррекции вольт-частотной 4 п 2 f 2 J R‘ . _ .
характеристики [18, 19]; Тмэ =----D 2 — электромеханическая постоянная времени АД; JD — приведен ный момент инерции привода; T3м =---К — электромагнитная постоянная времени АД. ЭМ 2пf R 2
Передаточную функцию АД при воздействии внешнего момента трения М ТР можно представить соответствием формирования электромагнитного момента АД току ротора. При этом остается неизменным магнитный поток статора (Ф С = const) как передаточный коэффициент к МЭ , рассчитываемый из соотношения
W 4 ( p ) = к МЭ
3 p ■ к ПР
2 п
С учетом приведенного момента инерции нагрузки развиваемый динамический момент MдИН на валу АД в переходном режиме работы ЧУЭП можно представить соотношением
dQ
Jd ■ = MД - (MС + MТр), д t
где M д — электромагнитный момент АД.
В узле Е3 условно осуществляется решение правой части уравнения (3) при введении управления АИН в режиме т- подмодуляции. Это позволяет программно изменять заданный момент трения M дИН (или момент трогания) за счет изменения амплитуды пульсирующего момента на валу АД. В многозвенных механизмах ПР момент трения (трогания) может изменяться в 1,5-2,5 раза и более в сравнении с моментом сухого трения. Единицы измерения частоты вращения вала (из рад/c в об/мин) преобразуются посредством передаточной функции
W 5 ( p ) = к ск = -0- , ^ 0
где n 0, О0 — частота вращения вала АД в об/мин и рад/с соответственно.
Звено 6 структурной схемы является безынерционным. Оно характеризует естественную обратную связь по наведенной противо-ЭДС АД. В этом случае расчетный коэффициент передачи к ‘ Э составит
W6(p)= k′Э, где f' p^-
Э 60 f, 60 .
p
Выполненные преобразования позволяют представить общий коэффициент усиления системы k У ЧУЭП через соответствующие коэффициенты отдельных звеньев:
k У = k 1 · k ПР · k Д · k МЭ · k СК · k ′ Э .
Статическая ошибка δ, обусловленная моментом сухого трения M ДИН , в замкнутых системах может быть уменьшена введением в систему местных параллельных и последовательных скоростных обратных связей, что видно из соотношения [4, 5, 20]
MТРkМЭ k. kЭ ’ где k1 — коэффициент усиления усилителя корректирующего звена (например, при включении ПИД- регулятора); k′Э — коэффициент усиления датчика скорости.
Однако увеличение k 1 больше некоторого значения сопровождается ростом k У и при некотором критическом значении k У ≥ k КР в приводе возможны автоколебания, потеря устойчивости. В этом случае k КР в (1+ k У ) раз выше, чем в системе без обратной связи. Это уменьшает статическую ошибку системы δ дополнительно с уменьшением момента M ДИН при введении управляемой микровибрации вала АД в режиме m- подмодуляции работы АИН.
Обсуждение и заключения. По итогам исследования можно сделать два заключения.
-
1. Применение двухрежимного управления автономным инвертором напряжения в ЧУЭП позволяет улучшить технические характеристики промышленного робота в зоне малой скорости движения рабочего орга-
- на.
-
2. Использование программно управляемой микровибрации ротора асинхронного двигателя ЧУЭП:
-
— обеспечивает снижение момента трения (трогания) в многозвенных подвижных механизмах;
— уменьшает уровень статической ошибки системы в 1,5–2,5 раза при сниженном коэффициенте усиления корректирующего усилителя;
— повышает устойчивость системы в динамических режимах управления.
Список литературы Обеспечение точностных параметров движения звена промышленного робота в зоне малой скорости
- Лукинов, А. П. Проектирование мехатронных и робототехнических устройств. - Санкт-Петербург: Лань, 2012. - 608 с.
- Теория механизмов и механика машин / К. В. Фролов; под ред. К. В. Фролова. - Москва: Высшая школа, 2005. - 496 с.
- Зотеев, В. Е. Параметрическая идентификация диссипативных механических систем на основе разностных уравнений / В. Е. Зотеев. - Москва: Машиностроение, 2009. - 344 с.
- Каширских, В. Г. Теория автоматического управления. В 2 ч. Ч. 2. Нелинейные и специальные системы / В. Г. Каширских. - Кемерово: КузГТУ, 2004. - 98 с.
- Соколовский, Г. Г. Электроприводы переменного тока с частотным регулированием / Г. Г. Соколовский. - Москва: Академия, 2006. - 273 с.
- Карнаухов, Н. Ф. Моделирование сухого трения звена производственного механизма с частотным приводом в зоне малой скорости / Н. Ф. Карнаухов, М. Н. Филимонов, Д. А. Смяцкий // Вестник Кузбас. гос. техн. ун-та. - 2018. - № 2. - С. 140-149.
- Карнаухов, Н. Ф. Особенности формирования циклических режимов частотного электропривода технологических машин в зоне малой скорости движения исполнительного механизма / Н. Ф. Карнаухов, М. Н. Филимонов, А. И. Изюмов // Вестник Донского гос. техн. ун-та. - 2012. - № 6 (67). - С. 76-86.
- ГОСТ32144-2013. Электрическая энергия. Совместимость технических средств электромагнитная. Нормы качества электрической энергии в системах электроснабжения общего назначения / ООО «ЛИНВИТ» ; Технический комитет по стандартизации ТК 30 «Электромагнитная совместимость технических средств» ; Федеральное агентство по техническому регулированию и метрологии (Росстандарт) ; Межгосударственный совет по стандартизации, метрологии и сертификации. - Москва : Стандартинформ, 2014. - 16 с.
- Филимонов, М. Н. Двухрежимное управление автономным инвертором напряжения частотного привода производственного механизма в зоне малой скорости / М. Н. Филимонов, Н. Ф. Карнаухов, Д. А. Смяцкий // Известия вузов. Электромеханика. - 2018. - Т. 61, № 2. - С. 70-76.
- Abdo, J. The Effect of Frequency and Amplitude of Vibration on the Coefficient of Friction for Metals / J. Abdo, M. Tahat // Tribology International. - April 2008. - Vol. 41, iss. 4.- P. 307-314.
- Пановко, Я. Г. Лекции по основам теории вибрационных машин и технологий / Я. Г. Пановко. - Москва: Изд-во МГТУ им. Н. Э. Баумана, 2008. - 192 с.
- Olsson, H. Friction Models and Friction Compensation / K. J. Aström, C. Canudas-de-wit, M. Gäfvert, and P. Lischinsky // European Journal of Control. - 1998. - Vol. 4, iss. 3. - P. 176-195.
- Бидерман, В. Л. Теория механических колебаний / В. Л. Бидерман. - Ижевск: РХД, 2009. - 414 с.
- Zheng Xu. Study of Five-level diodes-clamped Inverter Modulation Technology Based on Three-harmonic Injection Method / Zheng Xu, Song Li, and Hongying Pan. - EMEIT-2012. - P. 1973-1976.
- Dahidah, M.S.A. Selective harmonic elimination PWM control for cascaded multilevel voltage source converters: A generalized formula / M.S.A. Dahidah and V.G. Agelidis // IEEE Trans. on Power Electronics. - 2008. - Vol. 23, no. 4. - P. 1620-1630.
- N. Van Nho. A Simple On-line SHE PWM With Extension to Six Step Mode in Two-Level Inverters / N. Van Nho & M. J. Youn // International Conference on Power Electronics and Drives Systems, PEDS 2005. - Nov. 2005. - Vol. 2. - P. 1419 - 1424. - Режим доступа: https://ieeexplore.ieee.org/document/1619911 (дата обращения: 04.11.2019).
- Wanchai Subsingha. A Comparative Study of Sinusoidal PWM and Third Harmonic Injected PWM Reference Signal on Five Level Diode Clamp Inverter/ Wanchai Subsingha. - Energy Procedia. - June 2016. -Vol. 89. - P. 137-148.
- Поздеев, А. Д. Электромагнитные и электромеханические процессы в частотно-регулируемых асинхронных электроприводах / А. Д. Поздеев. - Чебоксары: Изд-во Чуваш. ун-та, 1998. - 172 с.
- Анучин, А. С. Системы управления электроприводов / А. С. Анучин. - Москва: МЭИ, 2015. - 373 с.
- Карнаухов, Н. Ф. Частотно-управляемый асинхронный электропривод мехатронных систем. Основы расчета и проектирования / Н. Ф. Карнаухов. - Ростов-на-Дону: Изд. центр ДГТУ, 2009. - 229 с.
- Лопухина, Е. М. Автоматизированное проектирование электрических машин малой мощности / Е. М. Лопухина, Г. А. Семенчуков. - Москва: Высшая школа, 2002. - 511 с.
