Обеспечение живучести асинхронных электроприводов

Автор: Однокопылов Иван Георгиевич, Дементьев Юрий Николаевич
Журнал: Вестник Южно-Уральского государственного университета. Серия: Энергетика @vestnik-susu-power
Рубрика: Электромеханические системы
Статья в выпуске: 2 т.14, 2014 года.
Бесплатный доступ
Представлен краткий обзор известных методов обеспечения живучести. На основе анализа скрытых резервов системы привода предложен и обоснован новый принцип построения электропривода со свойством живучести, представлены необходимые требования, предъявляемые к двигателю и преобразователю, разработаны алгоритмы управления асинхронным линейным приводом в аварийном режиме, предложены технические решения по реализации.Для проверки представленных алгоритмов управления, обеспечивающих живучесть, разработана специальная математическая модель линейного и вращающегося асинхронного электропривода и представлены результаты моделирования в нормальном и некоторых аварийных режимах работы, подтверждающие работоспособность предложенных принципов.В заключении проанализированы характеристики привода и показана возможность восстановления работоспособности в аварийном режиме работы. Кроме того, представлены рекомендации по проектированию асинхронных двигателей с обеспечением свойства живучести, а также определены направления для дальнейших исследований.
Электропривод, асинхронный двигатель, живучесть, аварийный режим работы, двухфазный режим, восстановление работоспособности
Короткий адрес: https://sciup.org/147158264
IDR: 147158264 | УДК: 62-83:621.313.333
Fault-tolerance of induction drives
The short review of known methods of realizing the fault-tolerant function is presented. A new drive control principle of implementing fault-tolerant function is proposed on the basis of analysis of available resources of the drive system. Novel control algorithms of induction drive are developed, and engineering solutions for the implementation are suggested.To verify the presented control algorithms including the fault-tolerant function a special mathematical model of induction drive is developed. This model can be applied to induction motors of linear and rotary type. In the paper presents simulation results of the normal and some emergency modes that confirm efficiency of the proposed principles.In conclusion the analysis of the drive characteristics is carried out and the possibility of recovery in theemergency operating mode is shown. In addition the authors present the guidelines for design of induction drives with fault-tolerant concept as well as the areas of further research.
Текст научной статьи Обеспечение живучести асинхронных электроприводов
Электропривод переменного тока, построенный на основе асинхронных двигателей, является основой построения множества технических систем вращательного и поступательного принципа действия. Прекращение функционирования таких систем может привести к нарушению безопасной эксплуатации оборудования с риском для персонала (лифты, электрические краны), а также большим экономическим потерям при авариях на необслуживаемых объектах эксплуатации с безостановочным циклом работы в течение продолжительного времени. Свойство живучести технической системы соответствует в английском языке термину fault-tolerance, которое может быть классифицировано следующим образом [1]:
Fail-silent – свойство объекта при отказе одного или нескольких компонентов работы отключиться и оставаться пассивным, тем самым не препятствовать работе соседних систем.
Fail-safe – свойство объекта при отказе одного или нескольких компонентов достичь безопасного состояния для окружающей среды путем неких действий за счет внутренних или внешних ресурсов.
Fail-operational – свойство объекта при отказе одного или нескольких компонентов восстановить работу полностью или частично за счет внутренних или внешних ресурсов.
В данной работе рассмотрена возможность частичного или полного восстановления работоспособности асинхронного электропривода (АЭП) при отказах различных компонентов применительно к линейным (ЛАД) и вращающимся асинхронным двигателям (АД).
Противостоять отказам в электроприводе можно, очевидно, без дополнительных ресурсов и с помощью дополнительных ресурсов (рис. 1).
С помощью дополнительных ресурсов может быть реализовано резервирование, которое подразделяется на статическое и динамическое [1]. В статическом резервировании используется, как правило, три и более компонента, на входы которых поступает один и тот же сигнал. В результате
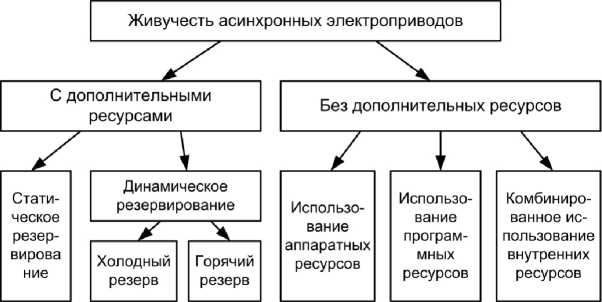
Рис. 1. Методы обеспечения живучести асинхронных электроприводов
Электромеханические системы на выходе происходит голосование и принятие решения, какой сигнал является верным. Статический резерв особенно актуален в измерительных системах (измерение проскальзывания в анитиб-локировочной системе автомобиля, измерение веса груза, поднимаемого краном и т. д.).
Динамический резерв подразделяется на холодный (cold standby) и горячий резерв (hot standby). При холодном резервный привод находится в готовности и при аварии основного привода полностью перенимает его функции. Такое решение отличается высокой степенью надёжности, но связано как минимум с удвоением стоимости системы привода. Все чаще холодный резерв используют для резервирования некоторых компонентов, а не всего привода. Например, для трехфазных двигателей используют четвертое плечо преобразователя [2]. В случае отказа транзистора в трехфазном инверторе выводят из эксплуатации не весь инвертор, а конкретную ячейку, в котором отказал транзистор, и вводят четвертую ячейку, находящуюся все это время в холодном резерве. При горячем резервировании работают оба привода, но с не полной нагрузкой. При аварийном отказе одного из приводов или некоторых фаз привода, другой перенимает часть нагрузки на себя [3].
Большой интерес вызывает класс электроприводов, которые достигают свойства живучести не за счет дополнительных, а с помощью внутренних ресурсов. Можно использовать избыточность аппаратной части, программной части или комбинировать обе части электропривода для достижения живучести.
Наиболее ярким примером аппаратной избыточности являются многофазные электропривода. В работе [4] показано, что использование 5- или 7-фазных АД в электроприводе с векторным управлением имеет преимущество, так как при большом числе фаз обеспечивается дополнительная степень свободы. Требуемая комбинация токов для обеспечения той же вращающейся МДС после обрыва фазы становится не уникальной (т. е. возможно несколько вариантов).
Избыточность программных ресурсов может быть заложена в управляющем микроконтроллере преобразователя. Известен асинхронный электропривод, в котором неисправность, возникшая вследствие обрыва фазы, устраняется алгоритмическим путем. В электроприводе [5] достигается снижение пульсаций момента за счет алгоритма введения гармоник напряжения для нейтрализации второй и высших гармоник пульсаций момента и сдвига частот в более высокий диапазон спектра. Это позволяет компенсировать пульсации момента за счет момента инерции асинхронного электродвигателя и обеспечить приемлемую работу с регулированием частоты.
При комбинированном способе обеспечения живучести необходимо заложить аппаратную и программную избыточность в электропривод. На- пример, известны способы обеспечения живучести при отказе одной из преобразовательных ячеек трехфазного электропривода [6]. Способ заключается в том, что среднюю точку преобразователя с помощью дополнительных тиристоров подключают или к концу фазной обмотки, в которой произошел отказ, или к средней точке двигателя. С помощью представленных схемных реализаций удается восстановить работоспособность электроприводов переменного тока. Но данный способ пригоден только для тех случаев, когда выходит из строя преобразователь, а не двигатель.
Существуют множество классификаций отказов электроприводов: электрической и механической части, двигателя и преобразователя и т. д. Но большинство отказов трехфазного электропривода переменного тока можно привести к отказу типа «обрыв фазы». К данному типу отказа будут относиться такие отказы как: физический обрыв фазы, межвитковое замыкание одной фазы, выход из строя силового транзистора или диода и т.д., т.е. сведем трехфазный электропривод к двухфазному и будем считать одну фазу отказавшей. Обеспечение живучести АД при таких типах отказов является актуальной проблемой и будет рассмотрено в данной статье, а отказы типа выхода из строя силового конденсатора или системы управления, а также все механические отказы в данной работе рассматриваться не будут.
Алгоритм обеспечения живучести
Предложен новый подход в повышении живучести асинхронного электропривода за счет микроконтроллерного управления с реализацией алгоритма восстановления работоспособности в аварийной ситуации (в двухфазном режиме). Известны условия существования кругового вращающегося магнитного поля в двухфазном режиме трехфазной электрической машины с двумя произвольно сдвинутыми в пространстве обмотками: δ + β=π; F BM = F CM , где F BM , F СM – амплитудные значения магнитодвижущих сил, отказ в фазе А , δ – угол пространственного сдвига обмоток, δ = 2π/3; β – угол временного сдвига токов обмоток, β=π/3. При наличии регуляторов тока в системе управления АД: F BM = F CM [7].
На основе вышеприведенных условий можно составить алгоритм обеспечения живучести трехфазного асинхронного двигателя. Векторные диаграммы токов, поясняющие изменения одной из двух фаз тока, оставшихся в работе электропривода при обрыве фазы А , приведены на рис. 2.
Если разложить главный вектор напряжения на ортогональные оси α , β, то при трехфазном симметричном напряжении получим круг (рис. 3, сплошная черная линия). Данный график будет соответствовать круговому вращающемуся полю. При обрыве фазы получим эллиптическое поле, что будет соответствовать пунктирному графику. Использование представленного алгоритма позво-
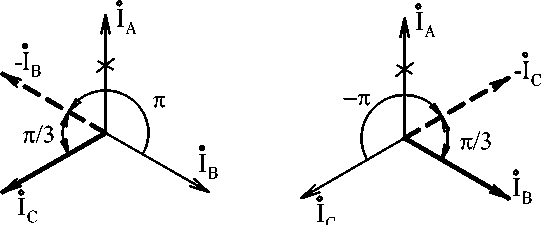
Рис. 2. Векторные диаграммы токов алгоритма восстановления
л ит и с п ол ь з ов ать ра в ном е рно м ощнос ть дву х о с тав ш и х с я в работе фа з и п олучи ть кр угов ое в ра щ а юще е с я по л е , но с м е нь ше й МД С ( рис. 3, серая линия).
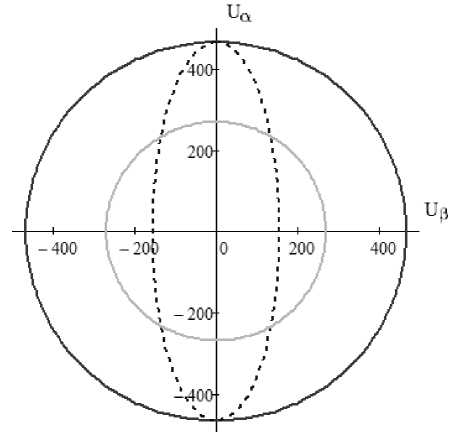
Рис. 3. Изменение вектора напряжения, разложенного по осям α, β
нуты на фазный угол, а намагничивающая сила ее равна намагничивающей силе реальной обмотки.
Для моделирования асинхронного электропривода воспользуемся трехфазной неподвижной (связанной с обмотками статора) системой координат а , в, Y- Использование неподвижной системы координат позволит избавиться от периодических коэффициентов – индуктивностей, которые будут меняться во времени при движении вторичного элемента. Трехфазная система координат позволит, в отличие от двухфазной а , в, имитировать необходимые аварийные режимы, такие как обрыв фазы двигателя.
Система дифференциальных уравнений мгновенных фазных напряжений обмоток статора и ротора для асинхронного вращающегося двигателя [10]:
U a = R^a
U b = R^b
+ A ;
dt
+ d - в ;
dt
Uc = Rsic + d ^ C ;
C s C dt dt
Ре а л из а ц ия пре д л ож е н ного а л горитм а в ос с т а нов л ени я подробно ра с с м отре на в [ 8, 9]. В данной ста тье пре дл о ж е но м ате м а т иче с кое м оде лиров а н ие ас ин х рон ны х двига те лей п ос т упате л ь ного и в р а щ а те л ь ного д в и ж е н ия, а т а кж е прим ене н ия д л я ни х св ой с т в а ж и вуче сти на ос нов е ра з ра бота нного алгоритма восстановления.
Математическая модель электропривода
П ри с ос та в л ени и ура вне н и й и ра с с м отре нии переходных проце с с ов а с и н х ронны х м а ши н б у де м ис пол ьзов ать общепри няты е доп у ще н ия [10], с в я за нн ы е с поня ти ем «и де ализ иров а н на я м а ши на »: ма шин а н е на с ыщена , по те рям и в с тал и прене бр е гае м ; фа з ные обм отк и сим м е тричны и сдвин у ты на у гол 120 эл е к триче с к и х град ус ов ; на м а гн ич ив а ю щ и е с и л ы обм оток и м а гн и тные пол я ра с преде ле ны с и н ус ои да л ь но в дол ь о кр ужнос т и в оз д у шного за з ора ; в оз ду шны й з а з ор ра в ном е ре н; ротор с имметричен; питающая сеть – бе скон ечн о б ол ьшой мощн ости . Р еа л ьна я ра спре де л енна я обм от ка заменяется сосредоточенной, оси фа з которой с д ви-
где UA , UB , UC – напряжения фаз статора; iA , iB , iC , ia , ib , ic – токи фаз статора и ротора; Rs , Rr – сопротивления фаз статора и ротора; ю - частота вращения вала двигателя; Ψ A , Ψ B , Ψ C , Ψ a , Ψ b , Ψ c – результирующие потокосцепления.
Электромагнитный момент M для трехфазной системы координат содержит все возможные пары произведений токов двигателя:
M = Р 23- L m ( ( i A i c + i B i a + i C i b ) -
-(iAib + iBic + iCia )), (2)
где p – число пар полюсов асинхронного двигателя; L m – взаимная индуктивность. Уравнение дви-
жения электропривода:
J - to p dt
= M - M c ,
где M c – момент нагрузки на валу двигателя J – момент инерции.
Система дифференциальных уравнений мгновенных фазных напряжений обмоток индуктора и вторичного элемента для линейного асинхронного
dV m = F — F., dt c
где F c – сила нагрузки, m – масса движущейся части.
двигателя:
U a = R s i A
U b = R s i B
U c = R s i c
d Y + dt d Y
+------ dt
dY dt
A
;
B
;
C
;
-
0 = R r i a + d ^ a + ( Y b — Y c ) -VL ;
dt т p V3
-
0 = R r i b + d Y b + ( Y c —Y a ) - V ^;
dt т p V3
-
0 = R r i c + d Y c + ( Y a —Y b ) -VL , dt т p V3
где V – линейная скорость вторичного элемента; т - полюсное деление линейного асинхронного двигателя. Электромагнитная сила для ЛАД:
_ 3Пnm
F = —;—( ( i A i c + i B i a + i c i b ) 2 т
—
— (iAib + iBic + iCia )). (5)
Уравнение движения линейного асинхронного электропривода:
Результаты имитационного моделирования
Для решения систем дифференциальных уравнений был использован численный метод Рунге – Кутта 4-го порядка. Из выражений (1) и (4) при заданных начальных условиях найдем токи во всех фазах, далее с помощью выражений (2) и (5) найдем электромагнитный момент АД или электромагнитную силу ЛАД. Угловую и линейную скорость найдем из выражений (3) и (6).
Моделирование проведем для двух асинхронных двигателей. Параметры схем замещения для линейного [11] и вращающегося двигателей приведены в табл. 1 и 2.
На рис. 4 и 5 представлены механические характеристики линейного и вращающегося асинхронных двигателей: трехфазный режим, двухфазный режим с алгоритмом восстановления и двухфазный режим без алгоритма восстановления.
Проанализировав полученные характеристики, можно сделать вывод о том, что асинхронный двигатель в аварийной ситуации при обрыве фазы способен работать дальше при тех же номинальных токах, но только в области малых нагрузок и обеспечивая скорость от 20 до 50 % от номинальной. При номинальной же нагрузке двигатель опрокидывается. Использование предложенного ал-
Параметры схемы замещения линейного асинхронного двигателя
Таблица 1
|
U н , В |
f , Гц |
R s , Ом |
R r , Ом |
Ls , Гн |
Lr , Гн |
L m , Гн |
p |
m , кг |
τ, м |
F н , Н |
|
220 |
50 |
0,0705 |
0,1311 |
0,0048 |
0,0048 |
0,0039 |
10 |
351,3 |
0,2 |
800 |
Параметры схемы замещения вращающегося асинхронного двигателя MTF 311-6
Таблица 2
|
U н , В |
f , Гц |
R s , Ом |
R r , Ом |
L s , Гн |
L r , Гн |
L m , Гн |
p |
J , кг∙м2 |
M н , Н·м |
|
220 |
50 |
0,4902 |
0,4991 |
0,05855 |
0,05932 |
0,05679 |
3 |
0,225 |
111 |
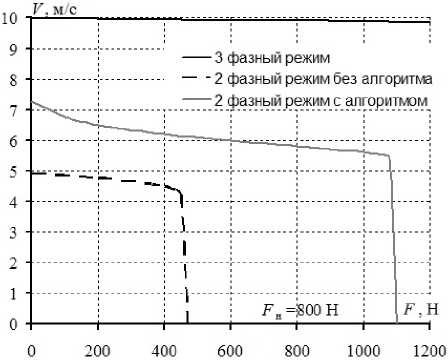
Рис. 4. Механические характеристики вращающегося асинхронного двигателя
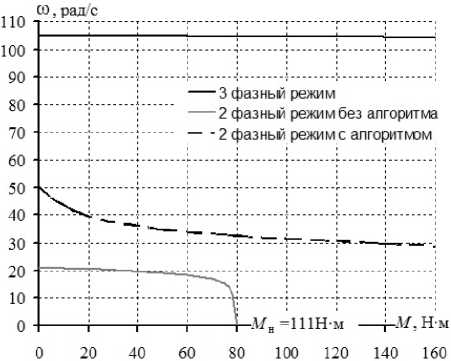
Рис. 5. Механические характеристики линейного асинхронного двигателя
горитм а п озв ол яе т прод олж и ть ра бот у в обл а с т и ном инал ьно й на гр у з к и на по ни ж е н ной скорос ти.
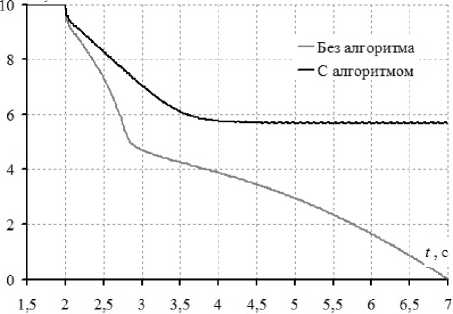
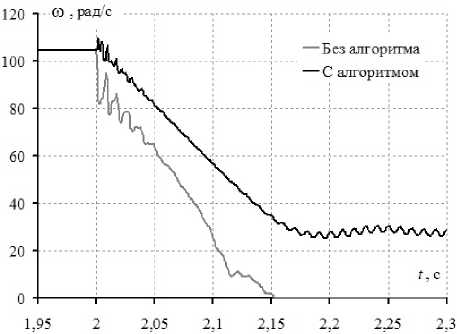
На рис. 6 и 7 представлены д ин а мически е ха ра к те р ист и к и а си н х ро н ны х д вигат е ле й пр и пе р ех од е из трехфазного р е жима раб оты в а ва р и йн ы й дву х фа зны й режим . Мо делирова н и е про в о д и л ос ь пр и ре а к т и вно й номин ал ь но й наг р узке на д виг а т ел ь, по этому пр и обры в е ф а з ы бе з а к т и в и з ац и и ал гор и тма в ос стано вл ен и я скорост ь пад а е т до н у ля (см. рис. 6).
П ри а кти в из ац ии а л гори тм а в ос с та новления скорос ть па да е т до ус танов ив шегос я з на че н ия, и дв и га те л ь прод ол ж а е т ра бот у. При этом а кт ивиза ци я алгори тм а в ос с тановл ени я обе с пе ч ив а ет ск орость у ЛАД до уровня около 50 % от н ом ин а льного значения (рис. 6, а ), в то в ре м я ка к у в р ащающегося АД – около 30 % (рис . 6, б).
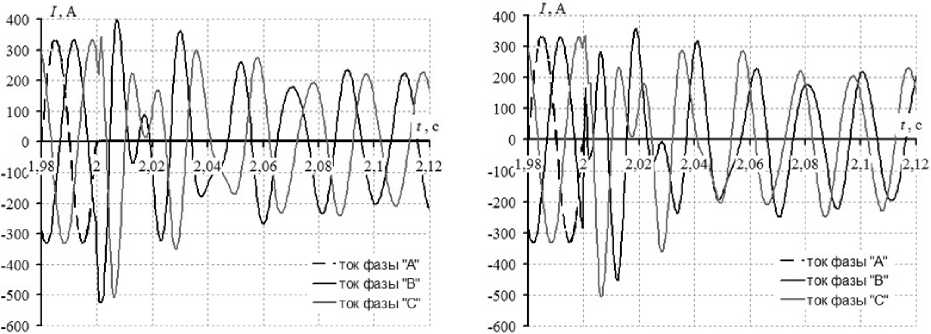
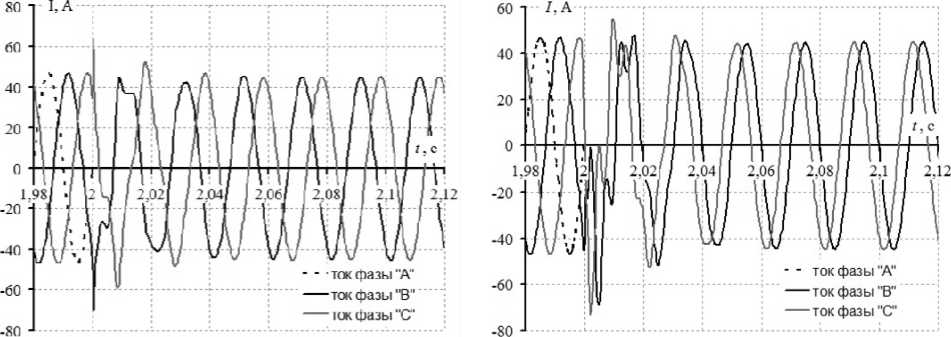
На рис. 7, а и 8, а представлены токи статора АД при обрыве фазы. Происходит неконтролируемая аварийная ситуация. При активизации алгоритма восстановления (рис. 7, б и 8, б) происходит перестроение токов статора согласно алгоритму. Большое влияние на перестроение токов будет оказывать время диагностики – время с момента возникновения аварийной ситуации до момента активизации алгоритма восстановления. Это время должно быть минимизировано.
Установившаяся скорость работы АД с алгоритмом восстановления живучести гораздо ниже номинальной. Это объясняется потерей 1/3 от подводимой к двигателю мощности. При сохранении нагрузочного момента необходимо работать на более низкой скорости. Но полученная на рис. 6 установившаяся скорость для линейного и вращающегося двигателей различна. Величина скорости в таком режиме будет зависеть от многих параметров двигателя, таких как мощность, электромагнитная постоянная времени, число пар полюсов и многих других. Оценить влияние числа пар полюсов АД p можно по рис. 9, где ω 3ф/2ф – отношение скорости двигателя в трехфазном режиме к скорости в аварийном режиме с активированным алгоритмом. Результаты исследований показали, что чем больше число пар полюсов, тем меньше перепад ω 3ф/2ф .
К, м/с
а)
б)
Рис. 6. Зависимость скорости АД от времени при переходе из трехфазного режима работы в аварийный двухфазный режим: а – линейная скорость V для ЛАД; б – скорость вращения ω АД
а)
б)
Рис. 7. Зависимости трехфазного тока индуктора линейного асинхронного двигателя от времени при переходе из трехфазного режима работы в аварийный двухфазный режим: а – неконтролируемый; б – с активизированным алгоритмом восстановления
а) б)
Рис. 8. Зависимости трехфазного тока статора вращающегося асинхронного двигателя от времени при переходе из трехфазного режима работы в аварийный двухфазный режим: а – неконтролируемый; б – с активизированным алгоритмом восстановления
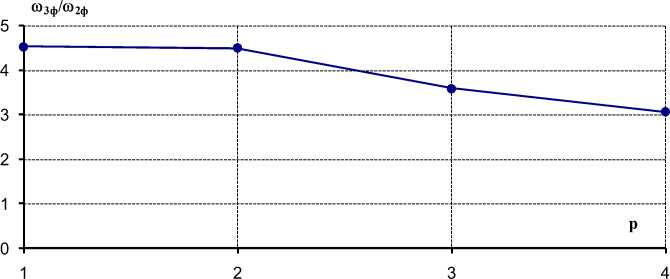
Рис. 9. Зависимость падения частоты вращения вала двигателя в двухфазном режиме от числа пар полюсов АД
Заключение
Предложен способ обеспечения живучести асинхронного электропривода вращательного и поступательного движения. В случае отказа одной из фаз разработанный алгоритм позволяет обесп ечить скорость двигателя до 50 % от номинального значения без дополнительных аппаратных затрат.
Время диагностики аварийной ситуации и время переключения системы управления на н о вый алгоритм не должно превышать период ш иротно-импул ьсной модуляции и электромагни тную постоянную времени.
Полный диапазон скоростей привода может быть получен, если электрический привод эк с плуатировать в трехфазном режиме на скорости ниже номинальной или проектировать новый пр и вод с возможностью повышения напряжения и частоты выше номинальных значений.
Дальнейшие исследования направлены на улучшение аппаратного и программного обесп ечения (системы управления).
Список литературы Обеспечение живучести асинхронных электроприводов
- Isermann R. Fault-Diagnosis Systems, Springer-Verlag, 2005. 475 p
- Silverio Bolognani, Marco Zordan, Mauro Zigliotto, Experimental Fault-tolerant Control of a PMSM Drive, IEEE Transactions on Industrial Electronics, October 2000, vol. 47, no. 5
- Jingwei Zhu, Nesimi Ertugrul and Wen Liang Soong, Performance Investigation of a Fault-Tolerant Brushless Permanent Magnet AC Motor Drive, Power Electronics and Motion Control Conference, 2006. IPEMC 2006. CES IEEE 5th International
- Fu Jen-Ren, Lipo T.A. Disturbance-free operation of a multiphase current-regulated motor drive with an opened phase, IEEE Trans. Ind. Appl., 1994, vol. 30, no. 5, pp. 1267-1274
- Kastha Debaprasad, Bose Bimal K. Fault mode single-phase operation of a variable frequency induction motor drive and improvement of pulsating torque characteristics, IEEE Trans. Ind. Electron, 1994, vol. 41, no. 5, pp. 426-433
- André MS Mendes, AJ Marques Cardoso Fault-Tolerant Operating Strategies Applied to Three-Phase Induction-Motor Drives, IEEE Transactions on Industrial Electronics, December 2006, vol. 53, no. 6.
- Юферов Ф.М. Электрические машины автоматических устройств. М.: Высш. шк., 1988. 479 с
- Дементьев Ю.Н., Однокопылов Г.И. Однокопылов И.Г. Исследование частотно-регулируемого асинхронного электропривода со свойством живучести. Известия высших учебных заведений. Проблемы энергетики. 2008. № 9-10/I. С. 142-150.
- Однокопылов Г.И., Образцов К.В., Однокопылов И.Г. Принципы обеспечения «живучести» электроприводов переменного тока. Электричество. 2009. № 12. С. 51-56.
- Копылов И.П. Математическое моделирование электрических машин: учеб. для вузов. 3-е изд. перераб. и доп. М.: Высш. шк., 2001. 327 с.
- Wang Liqiang, Lei Meizhen, Lu Qinfen, Ye Yunyue, Modeling and Simulation of Field Oriented Controlled Large Air-gap Linear Induction Motor, Proceedings of the 26th Chinese Control Conference, July 26-31, 2007, Zhangjiajie, Hunan, China, pp. 87-91.
