Области достижимости при многоканальном управлении траекториями экспериментального суборбитального самолета

Автор: Лазарев Ю.Н., Баяндина Т.А.
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Управление и моделирование
Статья в выпуске: 1 т.4, 2002 года.
Бесплатный доступ
Исследуются маневренные возможности суборбитального самолета при движении в атмосфере. Построены области достижимости для двухканального и трехканального управления с учетом ограничений на управление, режимы движения в атмосфере и терминальные условия. Показаны управляющие зависимости по каналам угла атаки, угла крена и тяги двигателя, обеспечивающие приведение суборбитального самолета в характерные точки областей достижимости.
Короткий адрес: https://sciup.org/148197668
IDR: 148197668 | УДК: 629.782.519.711
Landing areas and multi-channel trajectory control of experimental suborbital aircraft
Maneuverability of suborbital aircraft motion in atmosphere is discussed. Landing areas for two-channel and three-channel control are determined, with regard to constraints on control, motion modes and terminal conditions. Control programmes for the channels of the angle of attack, angle of roll and engine trust are given, which bring a suborbital aircraft to specific points of landing areas.
Текст научной статьи Области достижимости при многоканальном управлении траекториями экспериментального суборбитального самолета
Успешное создание многоразовой космической транспортной системы связано с опережающей разработкой экспериментального летательного аппарата, предназначенного для проведения летных экспериментов по отработке наиболее сложных технологий. Обоснованы проекты разработки демонстраторов, способных как совершать суборбитальные полеты для проведения летных исследований, так и выводить на орбиту спутника Земли небольшие полезные нагрузки. В статье в качестве объекта управления рассматривается экспериментальный суборбитальный самолет МАКС-Д - демонстратор технологий перспективных авиационно-космических систем [1].
Самостоятельное движение суборбитального самолета начинается с момента окончания его выведения на суборбитальную траекторию на высоте около 70 км при положительном угле наклона траектории и скорости аппарата значительно меньше круговой. После достижения высоты 85.. .90 км суборбитальный самолет совершает управляемый спуск в атмосфере до начала участка предпосадочного маневрирования на высоте около 20 км.
Суборбитальные траектории характеризуются наличием начального восходящего участка и относительно небольшим уровнем кинетической энергии аппарата. Недостаточная скорость не позволяет суборбитальному самолету реализовать на участке спуска в атмосфере режим квазистационарного планирования. В зависимости от программ изменения углов атаки и крена могут быть реализованы как крутые траектории с быстрой потерей высоты и большими тепловыми и инерционными нагрузками, так и рикошетирующие траектории, характеризующиеся отражениями аппарата от плотных слоев атмосферы.
Каналы управления и ограничения
Управление движением суборбитального самолета при спуске в атмосфере осуществляется по двум каналам — по каналу угла атаки а и каналу скоростного угла крена у a . На управляющие зависимости накладываются ограничения. Минимальные и максимальные значения угла атаки заданы в зависимости от числа Маха M: при 1 < М < 10 oo а . = 1 х M, а = 3,8 х M; при М>10 min max oo а . = 20 , а = 45 . Ограничения на min max максимальный угол крена на участках снижения уаmax = 60o, на участках, прилегающих к точкам рикошета уа max = 90o.
Расширение маневренных возможностей суборбитального самолета возможно при использовании тяги двигателя, в этом случае к двум рассмотренным добавляется третий канал - канал управления секундным массо- вым расходом топлива в • Необходимым условием реализации трехканального управления является наличие на борту самолета запаса топлива, предназначенного для использования на участке спуска в атмосфере.
Траектории спуска с рикошетами неустойчивы в том смысле, что могут значительно изменять свой профиль при небольшом изменении управляющих зависимостей в процессе управления спуском [2]. Поэтому в качестве номинальных (расчетных) траекторий обычно принимаются траектории без отражений от плотных слоев атмосферы или с небольшим числом отражений и ограничениями на величину отражений. В рассматриваемой задаче на зависимость изменения высоты полета от времени наложено ограничение: траектория спуска может иметь только одно отражение от плотных слоев атмосферы (рикошет), величина которого не должна превышать допустимого значения. Поскольку в процессе формирования номинальной траектории количество рикошетов может меняться, а убирать следует все ри-кошеты, начиная со второго, то это условие можно сформулировать следующим образом: разность максимальной высоты после отражения и минимальной высоты до отражения не должна превышать трех километров для первого рикошета и не должна быть больше нуля на последующих участках траектории, т.е.
max min
Hj — Hj - AH j доп , где AH.доп = 3 км (j = 1), AH.доп = 0 (j = 2, _, J), J - общее число рикошетов на траектории.
Кроме этого условия при спуске в атмосфере нормальная перегрузка П у на всей траектории спуска не должна превышать заданного значения: П у - 3,5 .
В начале участка предпосадочного маневрирования отклонения терминальных значений скорости и угла наклона траектории должны находиться внутри области допустимых значений: их требуемые значения и допустимые отклонения от них равны для скорости Vmpe6 =500м/с при AV(T )=±30м/с , для угла наклона траектории 0mpeg =-10o при A0(T) = ±10.
Задача управления, условия и метод решения
Задача построения областей достижимости сводится к формированию оптимального многоканального управления, обеспечивающего приведение суборбитального самолета на их границы. Таким образом, требуется сформировать оптимальные управляющие зависимости по каналам углов атаки и крена, а также по каналам углов атаки, крена и тяги двигателя, обеспечивающие достижение суборбитальным самолетом границ областей достижимости при спуске в атмосфере с учетом ограничений на управление, режимы движения в атмосфере и терминальные условия. Границы областей состоят из крайних точек, в которые возможно попадание самолета при спуске, поэтому задачи формирования соответствующих программ управления формулируются как оптимизационные: максимизировать и минимизировать продольную дальность без ограничений и при заданных ограничениях на боковую дальность; максимизировать боковую дальность без ограничений и при заданных ограничениях на продольную дальность. Все оптимизационные задачи включают условия выполнения ограничений на режимы движения в атмосфере, управляющие зависимости и терминальные условия.
В качестве поверхности приведения принималась сфера с центром в центре Земли, проходящая на высоте 20 км над экватором. В модели движения суборбитального самолета учитывалась несферичность поля тяготения Земли и ее вращение вокруг собственной оси. Считалось, что опорная траектория суборбитального движения совпадает с плоскостью экватора.
Параметры атмосферы и аэродинамические характеристики самолета задавались таблично, максимальное значение аэродинамического качества на гиперзвуковых скоростях движения в атмосфере равнялось 1,8. Масса самолета без топлива принималась равной
15000 кг, а масса топлива на управление при спуске в атмосфере - 3000 кг.
Построение областей достижимости проводилось при следующих начальных условиях суборбитального движения: высота 70 км; скорость 4456 м/с (соответствует числу Маха, равному 15); угол наклона траектории 5,50; значения широты, долготы и угла курса принимались равными нулю.
При решении задач оптимизации номинального управления использовался численный метод формирования многоканального управления движением в атмосфере [3], позволяющий учитывать ограничения на функционалы задачи и управляющие зависимости. Численный метод разработан на основе метода последовательной линеаризации [4], который является типичным методом спуска в пространстве управлений и сводится к построению минимизирующей последовательности управлений.
Области достижимости
Области достижимости суборбитального самолета на поверхности приведения при ограничениях на управление и режимы движения для двухканального (тонкая линия) и трехканального (жирная линия) управления изображены на рис.1. Точки, находящиеся на границе областей достижимости были полу чены в результате решения серии оптимизационных задач. На рис.1 отмечены характерные точки с верхним индексом(2) для двухканального управления, а верхним индексом(3) - для трехканального: 1(2) и 1(3) обозначены точки, соответствующие максимальной продольной дальности; точки с максимальной боковой дальностью обозначены 2(2) и 2(3); точки с минимальной продольной дальностью обозначены 3(2) и 3(3).
Как видно из рис.1, использование в качестве третьего канала управления тяги двигателя позволяет значительно расширить область достижимости. В абсолютном измерении в наибольшей степени область достижимости увеличивается в продольном направлении: на 565 км возрастает максимальная продольная дальность, на 30 км уменьшается минимальная продольная дальность. Максимальная боковая дальность возрастает с 390 км до 510 км. В относительном измерении область достижимости в продольном направлении увеличивается в два раза, а в поперечном направлении расширяется приблизительно на 30%.
Траектории
На рис. 1 штриховыми линиями показаны трассы полета - проекции на поверхность приведения траекторий, приводящих субор-
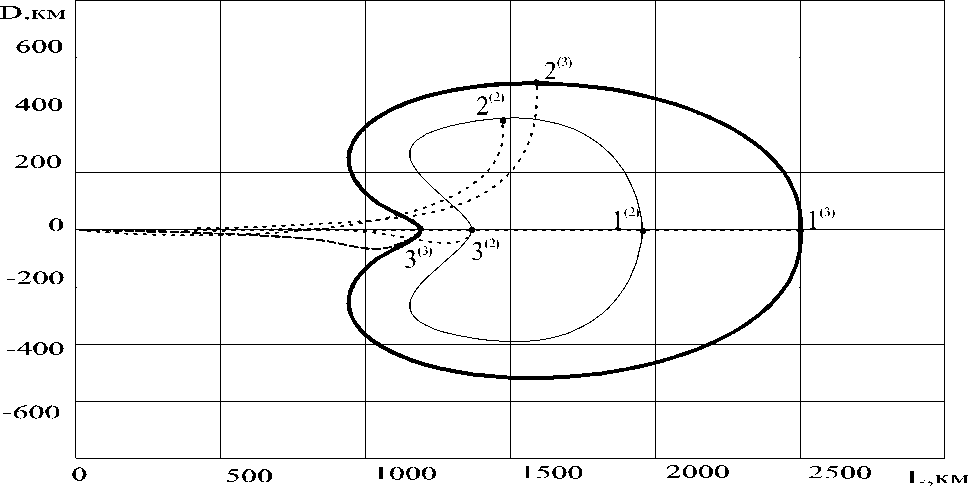
Рис.1. Области достижимости
битальный самолет на границу областей достижимости в характерные точки с максимальной боковой дальностью, а также с минимальной продольной дальностью. Трассы полета на максимальную продольную дальность на большей части траектории практически совпадают с осью симметрии областей достижимости. Несовпадение вызвано отличием угла крена от нуля на участках траектории, на которых управление формируется их условия выполнения ограничений на режимы движения в атмосфере и терминальные условия.
На рис.2 показаны профили этих траекторий - зависимости высоты полета суборбитального самолета от времени. Из рис.2 видно, что полученные траектории обеспечивают спуск самолета с одним отражением от плотных слоев атмосферы, ограниченным по высоте.
Рис.3 и 4 иллюстрируют выполнение в процессе спуска ограничений на удельный тепловой поток в критической точке аппарата с условным радиусом кривизны 1 м и нормальной перегрузки для траекторий полета на максимальную продольную и максимальную боковую дальность.
Из рисунка следует, что использование канала управления тягой двигателя позволяет не только расширить область достижимости аппарата при движении по суборбитальной траектории спуска, но и уменьшить тепловые и инерционные нагрузки на аппарат за счет изменения профиля траектории.
Программы управления
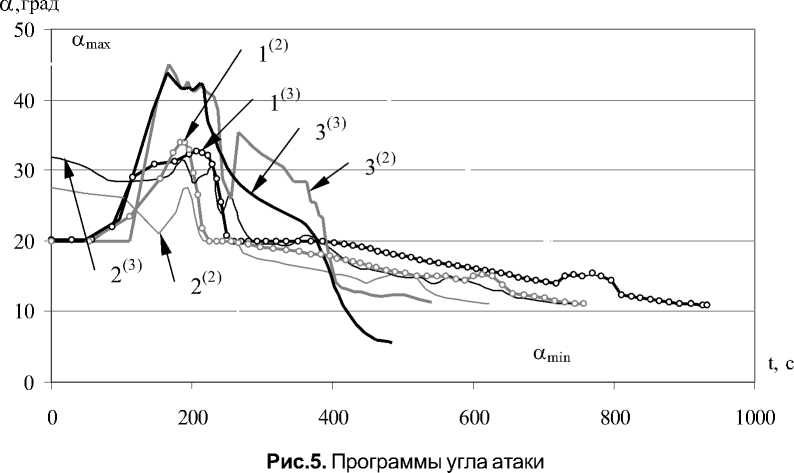
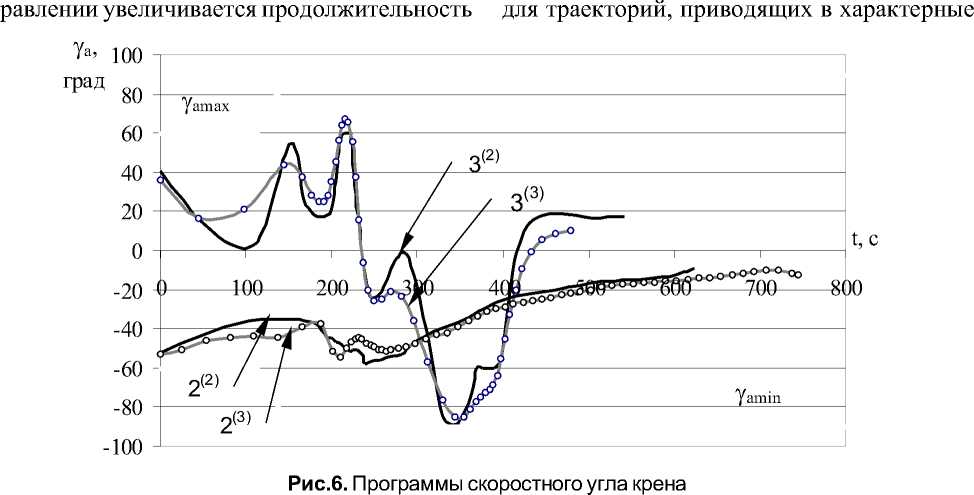
На рис.5-7 показаны программы управления по каждому из каналов, приводящие
H, км
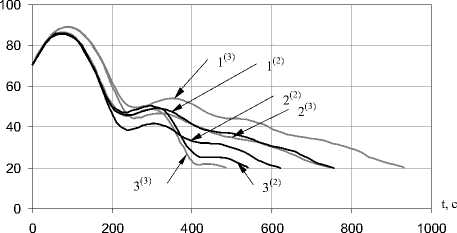
Рис.2. Зависимости высоты полета от времени
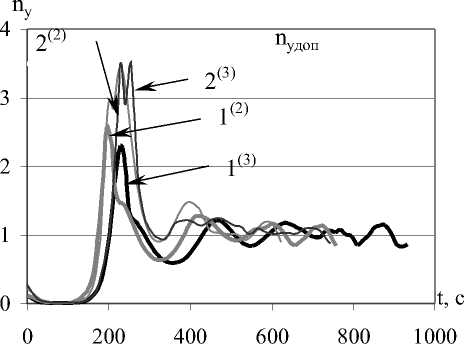
Рис.3. Изменение удельного теплового потока по времени суборбитальный самолет в характерные точки областей достижимости.
При полете на минимальную продольную дальность программы управления углом атаки (рис.5, кривые 3(2) и 3(3)) обеспечивают минимальное возможное значение аэродинамического качества при максимально допустимом лобовом сопротивлении, для этого управляющие зависимости приближены к предельно допустимым значениям за исключением тех участков траектории, где управление сформировано из условия выполнения ограничения на нормальную перегрузку.
Использование тяги двигателя в качестве дополнительного канала управления приводит к более плавному изменению скоростного угла крена по сравнению с двухканальным управлением (рис.6, кривые 3(2) и 3(3)). При этом структура программы угла атаки изменяется незначительно за исключением участка, где существенно меняется угол курса (от
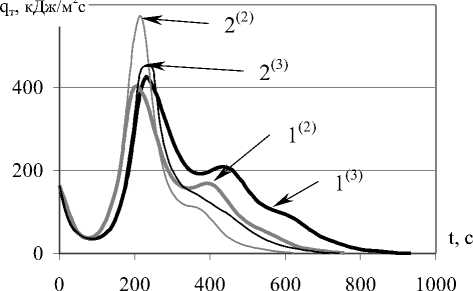
Рис.4. Изменение нормальной перегрузки по времени
300-й до 400-й секунды), на этом участке угол атаки становится меньше максимально допустимого значения, что позволяет лететь с большим аэродинамическим качеством.
При полете на максимальную продольную дальность программы управления углом атаки (рис.5, кривые 1(2) и 1(3)) обеспечивают максимальное значение аэродинамического качества, кроме участков траектории, на которых управление формируется из условий выполнения ограничений на режимы движения в атмосфере, а также участка, на котором угол крена отличен от нуля в связи с необхо- участка спуска с углами атаки, близкими к наивыгоднейшему значению.
При полете на максимальную боковую дальность программы управления углом атаки (рис.5, кривые 2(2) и 2(3)) на большей части траектории обеспечивают наибольшее значение аэродинамического качества, а программы управления углом крена (рис.6, кривые 2(2) и 2(3)) обеспечивают плавное изменение угла курса. Регулярность изменения управляющих зависимостей нарушается на тех участках траектории, где управление формируется из условия выполнения ограничений на режимы димостью уменьшить величину первого от- движения.
ражения аппарата после погружения в плотные слои атмосферы. При трехканальном уп-
На рис. 7 показаны программы управления массовым секундным расходом топлива
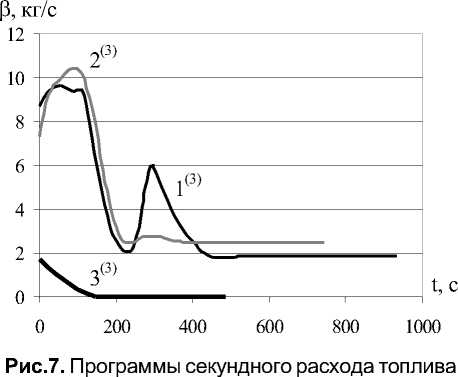
точки границы области достижимости. Для всех рассмотренных траекторий суборбитального движения тяга двигателя имеет наибольшее значение в начале траектории. При полете на максимальные дальности запас топлива расходуется полностью, при полете на минимальную продольную дальность расходуется небольшая часть топлива.
Заключение
Области достижимости характеризуют предельные маневренные возможности суборбитального самолета при двухканальном и трехканальном управлении и заданных ограничениях. С помощью используемых при построении областей достижимости численных методов на основе последовательной линеаризации можно сформировать многоканальное управление движением, приводящее суборбитальный самолет во внутренние точки областей достижимости к началу участка предпосадочного маневрирования. Использование совместно с каналами управления углами атаки и крена канала управления тягой двигателя расширяет маневренные возможности суборбитального самолета, обеспечивая возможность приведения в гораздо более обширную область конечных условий движения.
