Обоснование графического метода оформления впадин зубьев колеса с несимметричными профилями

Автор: Каргин П.А.
Журнал: Advanced Engineering Research (Rostov-on-Don) @vestnik-donstu
Рубрика: Технические науки
Статья в выпуске: 1 (44) т.10, 2010 года.
Бесплатный доступ
Описан графический метод построения переходных кривых ножек эвольвентных зубьев колес с большой асимметричностью профилей, пригодных для конструирования самотормозящихся зубчатых передач приводов грузоподъемных машин. Использован метод инверсии, в результате чего получены относительные положения зубьев второго, сопряженного колеса. Искомая переходная кривая с необходимым зазором охватывает найденную совокупность положений зубьев второго колеса.
Зубчатое эвольвентное колесо, метод обращения движения, удлиненная эпициклоида, картина положений зуба, переходная кривая ножки зуба
Короткий адрес: https://sciup.org/14249333
IDR: 14249333 | УДК: 621.86
Substantiation of graphical method of tooth space shaping for the wheel with asymmetric profiles
Substantiation of graphical method of plotting the tooth root fillet curves of involute wheel teeth with large asymmetry of profiles suitable for construction of self-braking tooth gear drives of load-lifting machines is described. Inversion method is applied to obtain relative locations of the second mating gear teeth. The described fillet curve with due clearance covers the found complex of the second gear teeth positions.
Текст научной статьи Обоснование графического метода оформления впадин зубьев колеса с несимметричными профилями
Введение. В последние десятилетия в приводах машин начали применяться эвольвентные зубчатые передачи с несимметричными профилями зубьев. Их достоинства достаточно широко исследованы в работах Э.Б. Вулгакова и его учеников [1]. Подобные передачи с большой асимметричностью профилей зубьев могут обладать также свойством самоторможения при обратном ходе (при высоком значении КПД прямого хода). Зубчатые звольвентные колеса для передач с большой асимметричностью профилей зубьев (коэффициент асимметрии 1,5 и более) с необходимой точностью могут быть изготовлены только методами копирования: дисковой фрезой со специальным профилем, литьем, посредством порошковой металлургии и т.д.[2]. Переходные кривые ножек зубьев таких колес не получаются автоматически как при изготовлении обкатным способом, а должны быть специально рассчитаны и воспроизведены на режущем инструменте. Знание этих кривых необходимо для того, чтобы исключить заклинивание передачи при вращении колес, для определения реального коэффициента торцевого перекрытия зубьев передачи (так как в рассматриваемых передачах значительные участки эвольвент на ножках зубьев срезаются переходными кривыми [3]), а также для расчета местных напряжений изгиба в корне зуба. При этом в любой фазе зацепления между несопряженными участками профилей зубьев шестерни и колеса должен обеспечиваться зазор, достаточный для размещения смазки, компенсации неточностей сборки и температурного расширения материала колес. Вопросы конструирования переходных кривых эвольвентных зубьев с большой асимметричностью профилей в известной нам литературе не рассматривались, что затрудняет применение таких передач в технике.
Описание метода и полученные результаты. Рассмотрим пример проектирования зубчатой звольвентной передачи с параметрами: число зубьев z 1 = z 2 =6, углы зацепления разноименных профилей a w =20 ° , а W =80 ° , коэффициент асимметрии профилей K= cos а w / cos а W = 5,41. Синтез этой передачи подробно рассмотрен в работе [3]. Схема передачи (торцевое сечение) представлена на рис.1, причем эвольвенты профилей пока не имеют переходных кривых на ножках зубьев. В рабочем режиме ведущее колесо 1 вращается против часовой стрелки, в режиме самоторможения также против часовой стрелки вращается колесо 2.
Для решения поставленной задачи удобно использовать метод обращения движения. Тогда колесо 1 станет неподвижным, а колесо 2 своей начальной окружностью радиусом rw будет перекатываться по неподвижной начальной окружности радиуса rw 1 . Зуб колеса 2 станет занимать определенные положения во впадине зубьев колеса 1, что позволит построить необходимой формы переходную кривую ножек зубьев этого колеса. Таким образом, задача сводится к построению положений зуба колеса 2 в неподвижной системе координат, связанной с колесом 1.
Рис.1. Схема зацепления передачи с параметрами: число зубьев z 1 = z 2 =6; углы зацепления рабочего и тормозящего профилей a w =20 0 , а w =80 0
Очевидно, что все точки головки зуба колеса 2 описывают при этом петлеобразные кривые – удлиненные эпициклоиды (удлиненные эпитрохоиды), но более удобно для построений использовать траекторию точки пересечения правого и левого профилей зуба (рис.1, вершина зуба – точка A). Из работы [4] известны параметрические уравнения названной функции, приведенные нами к исходным данным решаемой задачи:
<
x A = ( r w + r w 2 )C0S Ф- r a;
cos
г + г w 1 w 2
л
У A = ( r w , + r w - 2 )sin Ф — r a 2
sin
V f r w ,
r w 2
- ф ;
+ г w2
Г
V ww 2
ф, 7
где rw 1 , rw 2 - радиусы начальных окружностей колес; ra 2 - радиус окружности вершин зубьев колеса 2; ф - независимая угловая переменная.
Учитывая, что в решаемой задаче при u=1 r w 1 = r w 2 = r w и r a 1 = r a 2 = r a , уравнения (1)
можно переписать следующим образом:
<
xA = 2 rw cos ф - ra cos 2 ф ;
_ У A = 2 rw sin ф- Га sin2ф.
Задавая значения ϕ от 0 до 1,56 с шагом 0,05(рад) и составив специальную программу, рассчитаем xA и yA по уравнениям (2). Затем построим по этим координатам кривую в осях x и y (рис.2).
Для построения положений зуба колеса 2 удобно воспользоваться шаблоном зуба. Начальное положение шаблона показано на рис.3. Вершина зуба колеса 2 располагается, естественно, на вершине петли траектории; ось симметрии совпадает с межосевой линией O 1 O 2 передачи. Далее следует ступенчато перемещать ось колеса 2 на шаблоне по окружности радиуса O 1 O 2 в обе стороны от начального положения. При этом вершина зуба – точка A – перемещается по заданной траектории. Установленные положения зуба шаблона очерчиваются. На рис.4 в увеличенном виде показана итоговая картина положений зуба шаблона. Это дает возможность при принятом радиальном зазоре [3] очертить впадину зубьев колеса 1, не пересекая вычерченные положения зуба шаблона. В данном случае для оформления переходной линии использованы дуга окружности и отрезки прямой линии как дающие наиболее технологичные очертания впадины зуба.
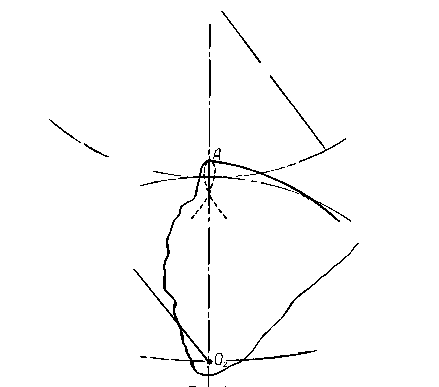
Рис.3. Схема использования шаблона для построения положений зуба колеса 2 (начальное положение)
Рис.2. График траектории точки вершины зуба колеса 2 в системе координат, связанной с колесом 1
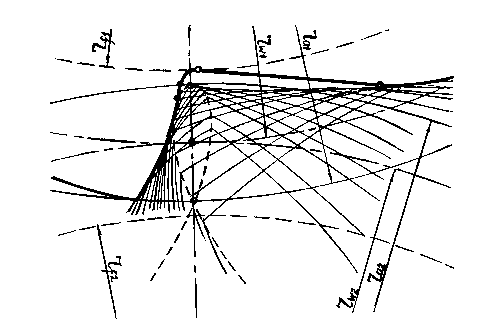
Рис.4. Картина относительных положений зуба колеса 2 и предлагаемая переходная кривая ножек зубьев колеса 1
Положение эвольвентной части зуба колеса 1 определяется как огибающая положений эвольвенты сопряженного зуба колеса 2. Если у зубчатой передачи z 1 и z 2 не равны, то описанные построения следует повторить еще один раз для получения переходной кривой ножек зубьев второго колеса.
Выводы
-
1. Для получения переходных кривых ножек эвольвентных зубьев с большим коэффициентом асимметрии необходимо построить относительные положения зубьев сопряженного с ним колеса. Вершина этого зуба в относительном движении перемещается по удлиненной эпициклоиде.
-
2. Переходная кривая ножек зубьев строится с необходимым зазором относительно положений зуба сопряженного с ним второго колеса. Для этого при принятом радиальном зазоре рекомендуется использовать наиболее технологичные геометрические элементы: дуги окружностей, отрезки прямых и т.п.
Список литературы Обоснование графического метода оформления впадин зубьев колеса с несимметричными профилями
- Вулгаков Э.Б. Возможности несимметричных зубчатых передач/Э.Б. Вулгаков, А.Л. Капелевич//Вестник машиностроения. -1986. -№ 4. -С.14-16.
- Каргин П.А. Синтез и оценка качества эвольвентной зубчатой передачи с несимметричными профилями зубьев/П.А. Каргин//Известия вузов. Машиностроение. -1998. -№10-12. -С.3-8.
- Каргин П.А. Проектирование и испытание самотормозящейся зубчатой передачи/П.А. Каргин//Вестник машиностроения. -2008. -№ 12. -С. 3-6.
- Гавриленко В.А. Зубчатые передачи в машиностроении/В.А. Гавриленко. -М.: Машиностроение, 1962.
