Обоснование конструкции динамометрического модуля для исследования лемешно-отвального плуга мотоблока и его практическая апробация с использованием технологий реверс-инжиниринга

Автор: Купряшкин Владимир Федорович, Уланов Александр Сергевич, Наумкин Николай Иванович
Журнал: Инженерные технологии и системы @vestnik-mrsu
Рубрика: Технологии и средства механизации сельского хозяйства
Статья в выпуске: 3, 2018 года.
Бесплатный доступ
Введение. Вспашка почвы, являясь одной из главных операций при возделывании сельскохозяйственных культур, одновременно требует значительных энергетических затрат и эффективного использования почвообрабатывающих машин, в частности, мотоблока с плугом. Анализ исследований работы мотоблока показывает, что объектом возмущений при вспашке является его рабочий орган (в данном случае плуг), на который действуют нормальные и касательные силы взаимодействия корпуса плуга с почвой (R R, R), которые могут быть определены путем пространственного динамометрирования плужного корпуса. Исходя из вышесказанного, цель исследования - разработка динамометрического модуля и изучение лемешно-от-вального корпуса плуга мотоблока с применением технологий реверс-инжиниринга на основе 3D-сканирования. Материалы и методы. Из анализа литературных и патентных источников следует, что для пространственного динамометрирования корпусов лемешно-отвальных плугов необходимо разработать достаточно простое и функциональное устройство, позволяющее путем динамометрирования определить силы R R и Rz с достаточно высокой точностью. Для решения этой проблемы была предложена конструкция устройства, на которое авторами получено удостоверение на рационализаторское предложение № 1173 «Экспериментальный модуль для динамометрирования лемешно-отвального корпуса плуга» (22.01.2018 г., ФГБОУ ВО «МГУ им. Н. П. Огарёва»). Результаты исследования. На основе расчетных схем был спроектирован и изготовлен динамометрический модуль, определены его геометрические параметры, проведены исследования плуга мотоблока в лабораторных условиях с установлением графических и аппроксимирующих силовых зависимостей взаимодействия плуга с почвой. Обсуждение и заключения. Полученные аппроксимирующие уравнения позволяют проанализировать характер изменения сил взаимодействия лемешно-отвального корпуса плуга мотоблока с почвой и установить пределы их варьирования. Кроме этого, использование аппроксимирующих силовых зависимостей позволяет определить степень их влияния на устойчивость плуга и тяговые характеристики мотоблока в случае соответствующих расчетов.
Почва, мотоблок, корпус плуга, устойчивость движения, динамометрический модуль, тензометрический датчик, 3d-сканер
Короткий адрес: https://sciup.org/147220589
IDR: 147220589 | УДК: 004.9:621 | DOI: 10.15507/0236-2910.028.201803.400-415
Design of a dynamometric module for studying a motoblock share-moldboard plow and its practical testing by using reverse engineering
Introduction. Plowing is one of the main operations in the cultivation of crops. It requires significant energy costs and efficient use of soil-cultivating machines, e. g. walking tractor (motoblock) with plow in this case. The analysis of work of the walking tractor shows that the object of the disturbances in plowing is its working body, in this case a plow, which is influenced by normal and shear interaction forces between the plow body and soil (R, R) which can be determined by spatial dynamometric disruption of the body. The aim ofthe study is to develop a dynamometric module and to research share-mouldboard plow of the motoblock using reverse engineering based on 3D scan. Materials and Methods. According to relevant literature and patent sources it is need to design a simple and functional device for the spatial dynamometrical body of share-mouldboard plow. This devise should allow to identify the forces R R and Rz with high accuracy by dynamometrical measurements. We developed the device providing the measurement of all forces R and Rz by dynamometrical measurements. The authors received a certificate for rationalization proposal No. 1173 "Experimental module for dynamometrical measurements of share-mouldboard plow body" (22.01.2018. National Research Mordovia State University). Results. We designed and manufactured a dynamometric module, defined the geometry of this device, and tested the plow of the motoblock in the laboratory with identification of graphical and approximating dependency power of the interaction of the plow with soil. Conclusions. Obtained approximating equations allow us to analyze the nature of the change of interaction forces of share-mouldboard plow body of motoblock with the soil and calculate the limits their variation. In addition, the use of the power of approximating dependences allow us to determine the extent of their influence on the stability of the plow and the traction characteristics of the motoblock.
Текст научной статьи Обоснование конструкции динамометрического модуля для исследования лемешно-отвального плуга мотоблока и его практическая апробация с использованием технологий реверс-инжиниринга
Введение. Вспашка почвы, являясь одной из главных операций при возделывании сельскохозяйственных культур, одновременно требует значительных энергетических затрат и эффективного использования почвообрабатывающих машин, в частности, мотоблока с плугом. Анализ исследований работы мотоблока показывает, что объектом возмущений при вспашке является его рабочий орган (в данном случае плуг), на который действуют нормальные и касательные силы взаимодействия корпуса плуга с почвой ( R x , R , R ), которые могут быть определены путем пространственного динамометрирования плужного корпуса. Исходя из вышесказанного, цель исследования - разработка динамометрического модуля и изучение лемешно-отвального корпуса плуга мотоблока с применением технологий реверс-инжиниринга на основе 3D-сканирования.
Материалы и методы . Из анализа литературных и патентных источников следу -ет, что для пространственного динамометрирования корпусов лемешно-отвальных плугов необходимо разработать достаточно простое и функциональное устройство, позволяющее путем динамометрирования определить силы R x , R и R z с достаточно высокой точностью. Для решения этой проблемы была предложена конструкция устройства, на которое авторами получено удостоверение на рационализаторское предложение № 1173 «Экспериментальный модуль для динамометрирования лемешно-отвального корпуса плуга» (22.01.2018 г., ФГБОУ ВО «МГУ им. Н. П. Огарёва»). Результаты исследования. На основе расчетных схем был спроектирован и изготовлен динамометрический модуль, определены его геометрические параметры, проведены исследования плуга мотоблока в лабораторных условиях с установлением графических и аппроксимирующих силовых зависимостей взаимодействия плуга с почвой.
Обсуждение и заключения . Полученные аппроксимирующие уравнения позволяют проанализировать характер изменения сил взаимодействия лемешно-отвального корпуса плуга мотоблока с почвой и установить пределы их варьирования. Кроме этого, использование аппроксимирующих силовых зависимостей позволяет определить степень их влияния на устойчивость плуга и тяговые характеристики мотоблока в случае соответствующих расчетов.
Благодарности: Работа выполнена при поддержке проекта № 18-013-00342 Российского фонда фундаментальных исследований.
Design of a Dynamometric Module for Studying a Motoblock Share-Moldboard Plow andIts Practical Testing by Using Reverse Engineering
V. F. Kupryashkin*, A. S. Ulanov, N. I. Naumkin
National Research Mordovia State University (Saransk, Russia)
Introduction. Plowing is one of the main operations in the cultivation of crops. It requires significant energy costs and efficient use of soil-cultivating machines, e. g. walking tractor (motoblock) with plow in this case. The analysis of work of the walking tractor shows that the object of the disturbances in plowing is its working body, in this case a plow, which is influenced by normal and shear interaction forces between the plow body and soil ( Rx, Ry, Rz ) which can be determined by spatial dynamometric disruption of the body. The aim of the study is to develop a dynamometric module and to research share-mouldboard plow of the motoblock using reverse engineering based on 3D scan. Materials and Methods. According to relevant literature and patent sources it is need to design a simple and functional device for the spatial dynamometrical body of sharemouldboard plow. This devise should allow to identify the forces Rx, Ry and Rz with high accuracy by dynamometrical measurements. We developed the devi y ce providing the measurement of all forces Rx, Ry and Rz by dynamometrical measurements. The authors received a certificate for rationa y lization proposal No. 1173 “Experimental module for dynamometrical measurements of share-mouldboard plow body” (22.01.2018. National Research Mordovia State University).
Results. We designed and manufactured a dynamometric module, defined the geometry of this device, and tested the plow of the motoblock in the laboratory with identification of graphical and approximating dependency power of the interaction of the plow with soil.
Conclusions. Obtained approximating equations allow us to analyze the nature of the change of interaction forces of share-mouldboard plow body of motoblock with the soil and calculate the limits their variation. In addition, the use of the power of approximating dependences allow us to determine the extent of their influence on the stability of the plow and the traction characteristics of the motoblock.
Acknowledgments: The work is supported by grant from the Russian Foundation for Basic Research (Project № 18-013-00342).
Разработка и внедрение наиболее актуальных методов экспериментального и теоретического исследования в области совершенствования сельскохозяйственной техники, а также технологии ее производства и испытаний, является одной из главных задач исследований, направленных на изучение почвообрабатывающих машин и их рабочих органов. В основе решения вышеуказанной задачи лежит анализ или синтез. Решение задачи анализа или синтеза современных технологических установок и объектов вызывает необходимость применения для этого различных последовательных, структурировано выдержанных способов, в частности, построения расчетных моделей их функционирования.
Моделирование одной из важнейших операций сельскохозяйственного производства – вспашки почвы мотоблоком с плугом – открывает путь для решения широкого комплекса задач анализа и синтеза параметров указанной технологической операции с одновременной оптимизацией процесса вспашки в зависимости от технических характеристик пахотного агрегата, условий устойчивости его движения и режимов работы1–4 [1–2].
Том 28, № 3. 2018
Вспашка почвы, являясь одной из главных операций при возделывании сельскохозяйственных культур, требует значительных энергетических затрат [3–4], поэтому к почвообрабатывающим машинам предъявляются особые требования, соответствие которым необходимо для эффективного использования техники5–7.
Анализ исследований работы почвообрабатывающих машин [5–6] показывает, что объектом возмущений мотоблока при вспашке является его рабочий орган (в данном случае плуг), на который действуют нормальные и касательные силы взаимодействия корпуса плуга с почвой ( Rx , Ry , Rz ), которые могут быть определены путем пространственного динамометриро-вания плужного корпуса8. Исходя из вышесказанного, цель исследования – разработка динамометрического модуля и изучение лемешно-отвального корпуса плуга мотоблока с применением технологий реверс-инжиниринга на основе 3D-сканирования.
Обзор литературы
В настоящее время существуют различные конструкции испытательных стендов и установок для динамометри- рования лемешно-отвальных корпусов плуга9.
Рассмотрим данные конструкции и особенности их функционирования с учетом силового взаимодействия лемешно-отвального корпуса плуга с почвой.
Для экспериментального определения тягового сопротивления в лабораторных условиях на тяговой тележке почвенного канала кафедры сельскохозяйственных машин ФГБОУ ВО «Башкирский государственный аграрный университет» была разработана специальная подвесная система, представляющая собой раму, в основе конструкции которой лежит паралле-лограммный механизм (рис. 1), который крепится к тележке с помощью шарниров10.
Отличительной особенностью данного механизма является то, что для снижения влияния вертикального перемещения плеча подвески на тензометрические показания плечо параллельного механизма ( l п = 1,15 м) значительно больше, чем возможность перемещения ( l д = 0,02 м) S-образного датчика растяжения-сжатия 2 , установленного в центре рамки и предназначенного для фиксации усилия от корпуса плуга.
Данная установка характеризуется достаточно простой конструкцией, однако обеспечивает только линейное динамометрирование, которого недостаточно для точного исследования.
В другом исследовании для определения тягового сопротивления корпуса плуга был разработан двухплоскостной
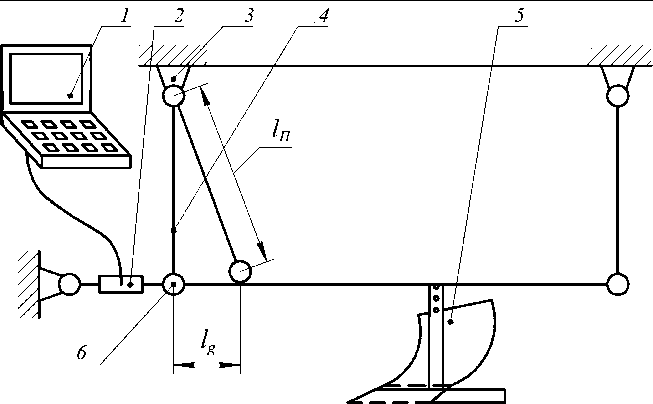
Р и с. 1. Установка для определения тягового сопротивления корпуса плуга ( 1 – измерительный комплекс М1С-400В; 2 – тензодатчик; 3 – верхние шарниры;
4 – параллелограммный механизм; 5 – рабочий орган (корпус плуга); 6 – нижние шарниры)
F i g. 1. Installation for determining the traction resistance of the plow body ( 1 – M1S-400V measuring complex; 2 – load cell; 3 – upper hinges;
4 – parallelogram mechanism; 5 – working body (plow body); 6 – lower hinges)
динамометрический корпус (рис. 2), позволяющий одновременно измерять продольную и поперечную составляющие силы сопротивления почвы11.
Динамометрический корпус включает в себя лемех 1 , отвал 2 , грядиль 3 , горизонтальную направляющую, оснащенную подшипниками качения 4, и устанавливается посредством вертикального шарнира 5 на раме экспериментальной установки 6 . Усилия в горизонтальной и поперечной плоскостях измерялись двумя кольцевыми тензометрическими датчиками 8–9 , установленными на динамометрическом корпусе. При этом плужный корпус закрепляется на установку для проведения ди-намометрирования с демонтированной полевой доской. Высота установки динамометрического корпуса, а также
Том 28, № 3. 2018 глубина обработки почвы регулируются с помощью шайб 7 .
В динамометрическом корпусе тен-зозвено 8 непосредственно измеряло продольную составляющую силы сопротивления почвы Rx . Боковая составляющая силы сопротивления почвы P б определяется из уравнения моментов в горизонтальной плоскости относительно вертикального шарнира 5 . Данная сила Р б, действуя на рабочую поверхность в горизонтальной плоскости, стремится повернуть корпус вокруг шарнира 5 и растягивает тензозвено силой Ry .
Запи y шем выражение для Р б:
_ с.
P6 = R y Ct , (1)
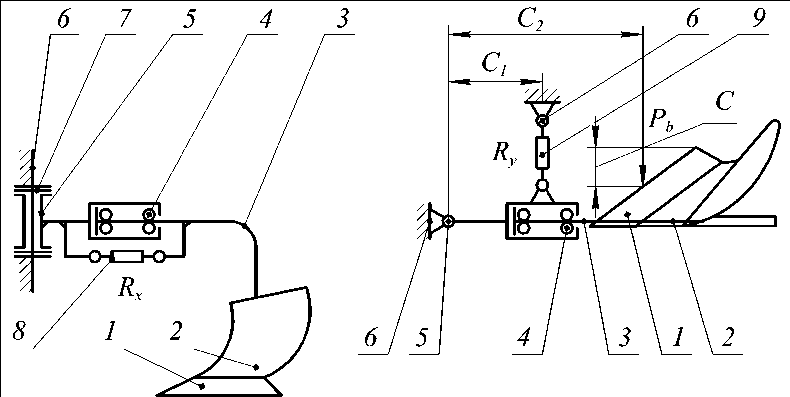
Р и с. 2. Схема динамометрического корпуса ( 1 – лемех; 2 – отвал; 3 – грядиль;
4 – подшипники качения; 5 – вертикальный шарнир; 6 – рама плуга;
7 – регулировочные шайбы; 8 – 9 – тензозвенья для измерения продольной Rх и поперечной Rу составляющих силы сопротивления почвы соответственно)
F i g. 2. Scheme of the dynamometer body ( 1 – share; 2 – mouldboard; 3 – mound;
-
4 – antifriction bearings; 5 – vertical hinge; 6 – frame of the plow; 7 – adjusting washers; 8 – 9 – tensor links for measuring the longitudinal Rx and transverse Rу components of the soil resistance force, respectively)
где С 1 и С 2 – плечи сил P б и Ry соответственно. y
Исследуемый плуг агрегатируется с трактором МТЗ-82 и присоединяется с помощью автосцепки СА-1. Тензодатчики, наклеенные на верхней тяге навески трактора по мостовой схеме, осуществляют измерение усилий, действующих в ней. Для измерения усилий в нижних тягах навески трактора применялись динамометрические тяги 1 с кольцевыми тензозве-ньями 2 конструкции ВИСХОМ. При полученных в результате исследований значениях усилий, возникающих в тягах навески трактора во время лабораторно-полевых экспериментов, показатели тягового сопротивления плуга R пл определялись по формуле:
R пл= P лcos α∙ cos β + P пcos α∙ cos β –
– P вcos θ , (2)
где P л, Р п и Р в – усилия в левой, правой и верхней тягах навески трактора соответственно, Н; θ – угол между верхней тягой и горизонтом, град.
Достоинством представленной схемы является возможность измерения уже двух параметров динамометриро-вания, но недостатком будет относительная сложность конструкции.
Кроме рассмотренных выше установок и стендов для динамометриро-вания плужных корпусов существуют разработки таких исследователей, как А. В. Захаров [7], С. В. Иванов12, Г. Н. Синеоков13, Д. З. Стародинский14, В. И. Мяленко [8–9], Н. И. Наумкин15 и др. Данные разработки характери-
MORDOVIA UNIVERSITY BULLETIN 1^1 зуются сложностью и громоздкостью конструкции, и в связи с этим их использование в условиях лабораторий затруднительно или невозможно.
Материалы и методы
В результате исследования предлагаемых конструкций был выявлен ряд существенных недостатков: невозможность одновременно определять характеристики действующих на плуг сил; сложность конструкции установок для пространственного динамометрирова-ния, обеспечивающих одновременное измерение сил сопротивления на корпусе плуга Rx , Ry , Rz ; невозможность проведения лабор y аторных исследований и, следовательно, проведение испытаний только в полевых условиях.
Из анализа литературных и патентных источников следует, что для пространственного динамометрирования корпусов лемешно-отвальных плугов необходимо разработать достаточно простое и функциональное устройство, позволяющее путем динамометрирова-ния определить силы взаимодействия корпуса плуга с почвой Rx , Ry и Rz с достаточно высокой точностью.
Для решения этой проблемы нами была предложена конструкция устройства, обеспечивающего измерение всех указанных сил путем динамо-метрирования. На данное устройство было получено удостоверение на рационализаторское предложение № 1173 «Экспериментальный модуль для ди-намометрирования лемешно-отвального корпуса плуга» (22.01.2018 г., ФГБОУ ВО «МГУ им. Н. П. Огарёва»). Особенностью модуля является наличие трехподвижного шарнира. Кинематическая схема установки представлена на рис. 3.
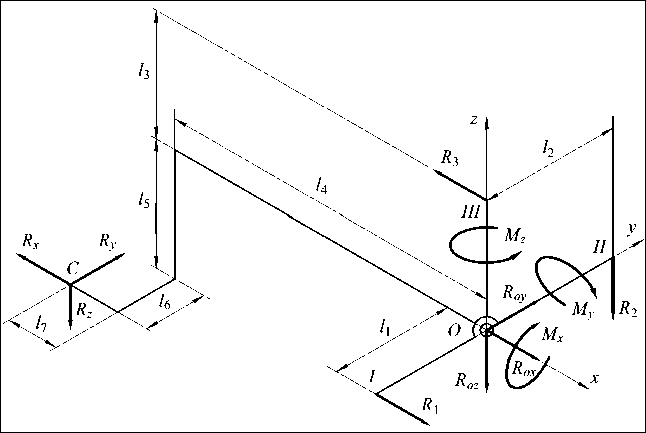
Для анализа особенностей функционирования данного динамометрического модуля составим расчетную схему нагружения (рис. 4), предварительно заменив связи их реакциями, а именно: в т. С . приложим силы взаимодействия корпуса плуга с почвой Rx , Rz и Ry ; в м. I, II и III приложим силы R I, R II y и R III, соответствующие показаниям тензометрических датчиков I, II и III в точке проекции главного вектора Rox , Roy и Roz . При этом допустим, что трение y в шарнирах невелико и, следовательно, примем вектор главного момента равным M o = 0.
На первом этапе составим уравнения моментов по плоскостям XOZ , YOX и YOZ .
Плоскость XOZ :
Moy = 0; R 3 l 3 + Rz ( l 4 + l 7) – Rxl 5 = 0. (3)
Плоскость YOX :
Moz = 0; R 1 l 1 – Rxl 6 – Ry ( l 4 + l 7) = 0. (4)
Плоскость YOZ:
Mox = 0; – R 2 l 2 + Ryl 5 + Rzl 6= 0. (5)
Здесь l 1, l 2, l 3, l 4 , l 5, l 6 и l 7 – геометрические размеры из схемы (рис. 3), м.
Каждое из полученных уравнений (3–5) содержит по два искомых неизвестных силовых фактора.
Для их решения выразим из уравнения (5) значения Ry и получим:
R Ó
R1 2 - R z l 6
l 5
Далее подставим (6) в (4) и получим следующую зависимость:
R1 1
-
Rl
-
( R 2 1 2 — R z l 6)( 1 4 + 1 7)
= 0, (7)
Затем из (7) выразим Rx :
( R , l , — R z l J( l 4 + l , ) - R
R x =--------—, ----------, <8)
l
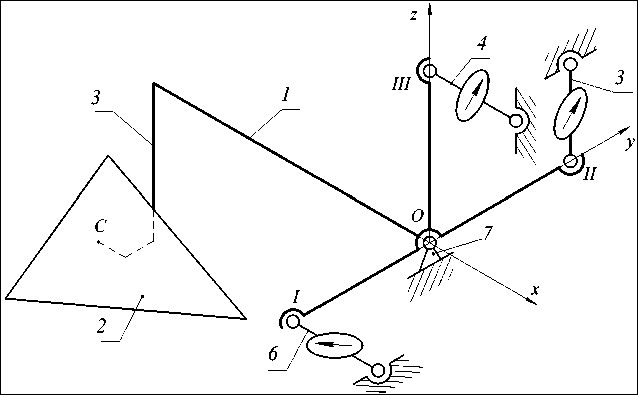
Р и с. 3. Кинематическая схема динамометрического модуля:
1 – корпус динамометрического модуля; 2 – корпус плуга;
3 – стойка корпуса плуга; 4–6 – динамометры; 7 – сферический шарнир
F i g. 3. Kinematic scheme of the dynamometric module:
1 – dynamometric module body; 2 – plow body;
3 – plow body stand; 4–6 – dynamometers; 7 – spherical hinge
Р и с. 4. Расчетная схема динамометрического модуля
F i g. 4. Calculation scheme of the dynamomtric module
Подставим (8) в (3), получим:
R X = R 3 1 3 + R Z ( 1 4 + 1 7 ) -
1 5 = 0, (9)
После преобразования уравнения (9) получим следующую зависимость:
R Z
R1l1l5
R 3 l 3
l6
2( 14 + 17)
Таким образом, уравнение (10) включает в себя значение динамометров I и III R 1 и R 3 соответственно, которые можно определить в ходе проведения испытаний.
Для нахождения значений сил Ry и Rx необходимо воспользоваться за- y висимостями (6) и (8) соответственно, а также результатами расчетов силы Rz и показаниями тензометрических датчиков I и II R 1 и R 2.
Таким образом, предлагаемая кинематическая схема динамометрического модуля при относительной простоте конструкции позволяет определять в ходе эксперимента значение сил Rx , Ry и Rz, действующих на корпус плуга. Однако при этом необходимо отметить, что отдельным вопросом, требующим решения, является определение геометрических параметров из схемы (см. рис. 4) – l 1, l 2, l 3, l 4 , l 5, l 6 и l 7. Так, параметры l 1, l 2, l 3 И l 4 характеризуются особенностями конструкции динамометрического модуля и компоновки его составных элементов, поэтому их можно определить после его проектирования и изготовления.
Геометрические параметры l5, l6 и l7 определяют положение т. С – точки приложения сил Rx, Ry и Rz относительно т. О, характеризуюyщее сферический шарнир (см. рис. 4). Определение размеров l5, l6 и l7 вызывает определенные трудности, связанные со сложной криволинейной поверхностью отвала плуга, поэтому для точного определения указанных размеров можно воспользоваться технологиями реверс-инжи- ниринга на основе 3D-сканирования, позволяющего получить CAD-модель реального образца и, следовательно, ее искомые размеры.
Рассмотрим результаты исследований лемешно-отвального корпуса плуга мотоблока с разработкой динамометрического модуля и использованием технологий реверс-инжиниринга на основе 3D-сканирования.
Результаты исследования
На основе вышеуказанных расчетных схем нами был спроектирован и изготовлен модуль для динамоме-трирования лемешно-отвального плуга мотоблока (рис. 5) и определены его основные конструктивные размеры: l 1 = 80 мм, l 2 = 80 мм, l 3 = 80 мм,
Том 28, № 3. 2018
l 4 = 355 мм, характеризующие, как было отмечено выше, взаиморасположение его составных элементов.
Для определения размеров l 5 , l 6 и l 7 был использован 3D-сканер Shining3D Optiscan-plus DM и ПК с установленным специализированным программным обеспечением. В 3D-сканере Shining, разработанном компанией Shining3D TechCo. Ltd, применены технологии «решетки» автоматического выравнивания по опорным точкам16. Устройство подходит главным образом для обратного моделирования сложной поверхности произвольной формы и широко применяется в области прикладных исследований и проектирования (RD), обратного проектирования
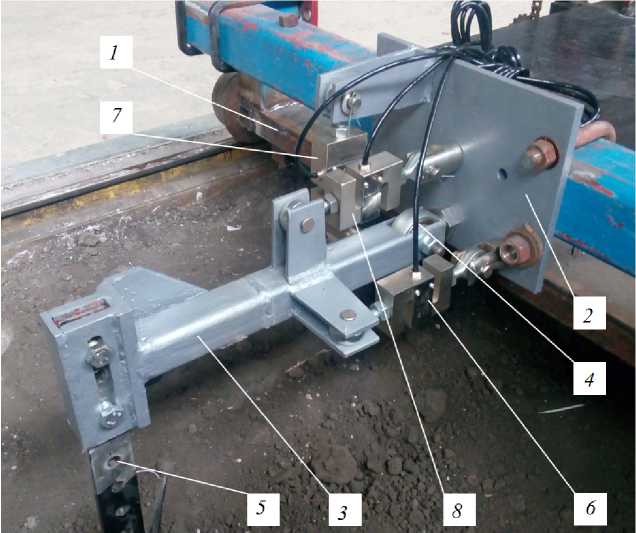
Р и с. 5. Динамометрический модуль для исследования сил действующих на лемешно-отвальный плуг мотоблока ( 1 – подвижный модуль экспериментального стенда; 2 – кронштейн; 3 – корпус;
4 – сферический шарнир; 5 – плуг; 6–8 – тензометрические датчики I, II и III)
F i g. 5. Dynamometric module for studying the forces of the motoblock operating on the sharemouldboard plow ( 1 – movable module of the experimental stand; 2 – bracket; 3 – body; 4 – spherical hinge; 5 – plow; 6–8 – strain gauges I, II and III)
(RE), и компьютерной верификации (CAV). На рис. 6 представлен общий вид 3D - сканера Shining3D Optiscan-plus DM с поворотным столом и лемешно-отвальным плугом П1-20/3.
В результате сканирования исследуемого объекта была получена его
САD-модель (рис. 6), которая в дальнейшем была обработана в программе КОМПАС 3D путем ее сечения двумя взаимно перпендикулярными плоскостями YOX и YOZ , расположенными на расстоянии от носка лемеха z = 95 мм и у = 98 мм соответственно (рис. 7).

Р и с. 6. Общий вид 3D-сканера Shining3D Optiscan-plus DM и лемешно-отвального плуга П1-20/3 для мотоблоков ( 1 – 3D-сканер; 2 – поворотный стол; 3 – плуг)
F i g. 6. General view of Shining3D Optiscan-plus DM scanner and P1-20/3 mouldboard plow for motor blocks ( 1 – 3D scanner; 2 – turntable; 3 – plow)
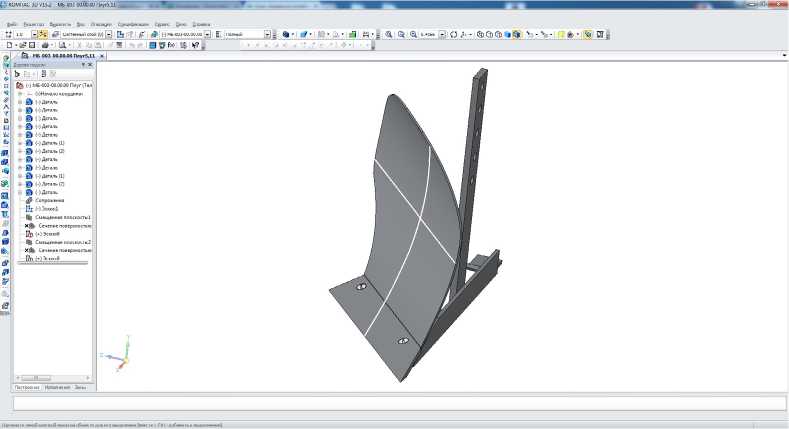
Р и с. 7. CAD-модель лемешно-отвального корпуса плуга П1-20/3 в программе КОМПАС 3D
F i g. 7. CAD-model of the P1-20/3 share-mouldboard plow in KOMPAS 3D program
В нашем случае значения z = 95 мм и у = 98 мм зависят от конструктивных и технологических параметров плуга П1-20/3, а именно от ширины захвата b = 200 мм и глубины обработки
Том 28, № 3. 2018
h = 220 мм, и определяются с учетом рекомендаций при условии заостренного лезвия лемеха17. Все это позволило получить геометрические параметры l 5 = 212 мм, l 6 = 84 мм и l 7 = 65 мм,
b)
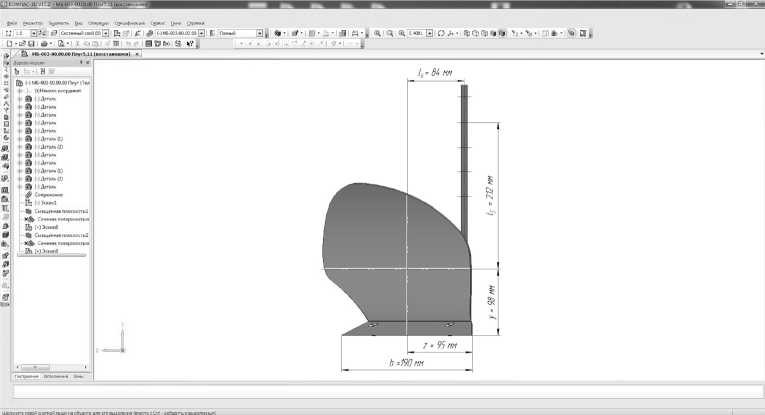
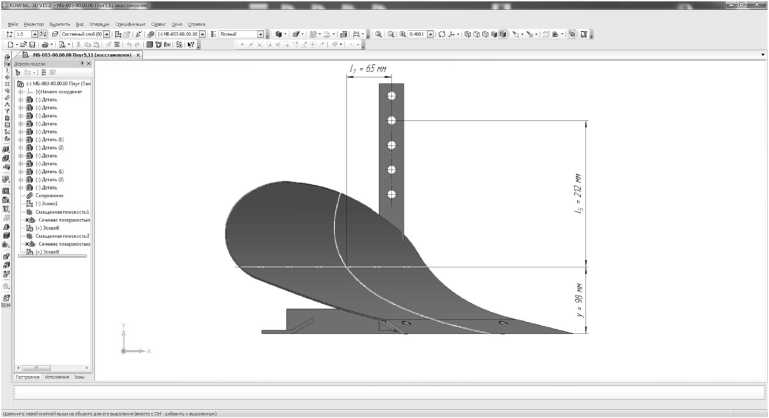
Р и с. 8. Проекции CAD-модели лемешно-отвального корпуса плуга П1-20/3 в программе КОМПАС 3D на плоскости YOZ (а) и YOX (b)
F i g. 8. Projections of the CAD-model of the P1-20/3 share-mouldboard plow body in KOMPAS 3D program on the plane YOZ (a) and YOX (b)
определяющие положение точки приложения сил R , R и R относительно xy z сферического шарнира динамометрического модуля.
На следующем этапе проводились лабораторные испытания лемешноотвального плуга П1-20/3, применяемого для вспашки почвы мотоблоком. Испытания проводились в почвенном канале лаборатории кафедры мобильных энергетических средств и сельскохозяйственных машин имени профессора А. И. Лещанкина ФГБОУ ВО «МГУ им. Н. П. Огарёва». Почва представляла собой малогумусный чернозем, твердость в ходе эксперимента поддерживалась в пределах от 1,25 до 1,26 МПа, а влажность – от 18 до 20 %. Испытания проводились в диапазоне рабочих скоростей движения от 1 до 4 км/ч.
В ходе проведения лабораторных исследований были получены значения
R 1, R 2 и R 3 показаний тензодатчиков I, II и III соответственно (табл. 1).
Используя данные табл. 1, основные конструктивные размеры ( l 1 = 80 мм, l 2 = 80 мм, l 3 = 80 мм, l 4 = 355 мм), размеры, определяющие положение точки приложения сил взаимодействия плуга с почвой относительно сферического шарнира динамометрического модуля ( l 5 = 212 мм, l 6 = 84 мм, l 7 = 65 мм), и (последовательно) зависимости (10), (6) и (8), рассчитаем значения Rz , R и Rx (табл. 2).
На основании табл. 2 были построены графики сил взаимодействия корпуса плуга с почвой Rz , Ry и Rx в зависимости от скорости движе y ния v . Обработка значений полученных графических зависимостей при их построении позволила установить соответствующие аппроксимирующие функции:
R x =- 49,5 v 2 + 382,7 v + 578; (11)
Т а б л и ц а 1
T a b l e 1
Значения показаний тензодатчиков
Values of the load cells
|
Нагрузка на тензодатчиках, Н / Load on load cells, Н |
Значения показаний тензодатчиков при скорости движения v , км/ч / Values of the load cells at speed v , km/h |
|||
|
1 |
2 |
3 |
4 |
|
|
R 1 |
2 479 |
3 214 |
3 603 |
3 816 |
|
R 2 |
961 |
1 241 |
1 439 |
1 515 |
|
R 3 |
1 453 |
1 909 |
100 |
2 043 |
Т а б л и ц а 2
T a b l e 2
Значения сил взаимодействия корпуса плуга с почвой Values of interaction forces of the plow body with soil
|
Силы сопротивления на корпусе плуга, Н / Resistance force on plow body, Н |
Значения сил взаимодействия корпуса плуга с почвой при рабочей скорости v , км/ч / Values of interaction forces of plow body with soil at operating speed v , km/h |
|||
|
1 |
2 |
3 |
4 |
|
|
R x |
908,0 |
1 155,0 |
1 271,0 |
1 320,0 |
|
R y |
290,6 |
381,2 |
432,1 |
462,0 |
|
R z |
181,6 |
219,5 |
279,6 |
277,2 |
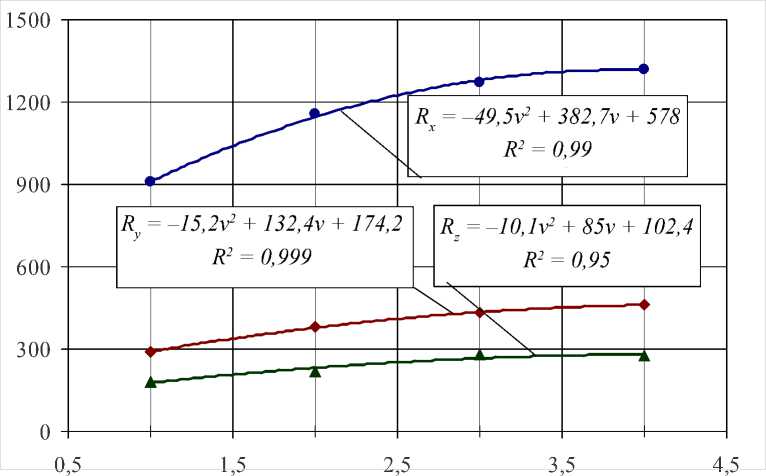
Р и с. 9. Графические зависимости сил взаимодействия лемешно-отвального корпуса плуга мотоблока с почвой Rx , Ry , Rz (Н) от скорости движения v (км/ч)
F i g. 9. Graphical dependences of the forces of interaction between share-mouldboard plow of the motor block with the soil Rx, Ry, Rz (H) on the speed v (km/h)
Ry = -15,2v2 + 132,4v + 174,2; (12)
Rz =-10,1v2 + 85v + 102,4. (13)
Величины достоверности данных уравнений составляют R 2 = 0,99, R 2= 0,99 и R 2= 0,95 соответственно.
Обсуждение и заключения
Полученные аппроксимирующие уравнения (11–13) позволяют проанализировать характер изменения сил взаимодействия лемешно-отвального корпуса плуга мотоблока с почвой Rx, Ry и Rz. Так, из рис. 9 следует, что графические зависимости сил Rx, Ry и Rz изменяются по нелинейным закоy нам, что подтверждает результаты ранее проведенных исследований в этой области другими авторами18–20. При этом значение силы Rx изменяется в пределах от 908 до 1 320 Н в диапазоне рабочих скоростей от 1 до 4 км/ч, а значения сил Ry и Rz варьируются от 291 до 462 Н и от 182 до 277 Н соответственно. Кроме этого, использование зависимостей (11–13) позволяет определить степень их влияния на устойчивость плуга и на тяговые характеристики мотоблока в случае соответствующих расчетов.
Таким образом, предложенные схема и конструкция модуля для динамоме-трирования лемешно-отвального плуга
-
18 Фархутдинов И. М. Совершенствование лемешно-отвальной поверхности корпуса плуга на основе моделирования технологического процесса вспашки : дис.... канд. техн. наук. Уфа, 2012. 176 с.
-
19 Мардарьев С. Н. Повышение эффективности работы плугов для отвальной вспашки путем адаптации их параметров к изменяющимся условиям функционирования : дис.... канд. техн. наук. Чебоксары, 2002. 154 с.
-
20 Иванов С. В. Повышение эффективности работы плуга с изменяемыми параметрами путем оптимизации системы стабилизации его поперечной устойчивости : дис.... канд. техн. наук. СПб ; Павловск. 2003. 176 с. URL: https://dlib.rsl.ru/01002615148
мотоблока, методика расчета, способ определения геометрических параметров с помощью реверс-инжиниринга на основе 3D-сканирования позволяют проводить испытания в лабораторных условиях и получать достаточно точные значения силовых характеристик взаимодействия рабочего органа с почвой. Все это дает возможность не только выявить характер изменения силовых ха-
MORDOVIA UNIVERSITY BULLETIN 1^1 рактеристик, но и определить степень их влияния на устойчивость плуга в отдельности и почвообрабатывающего агрегата в целом, а также выбрать наиболее оптимальные технологические режимы его функционирования и принимать обоснованные технические решения при модернизации существующих и разработке новых высокоэффективных почвообрабатывающих машин.
-
1. Мотоблок с бесступенчатым регулированием скорости / В. Ф. Купряшкин [и др.] // Сельский механизатор . 2017. № 12. С. 22–23.
-
2. Динамика машинно-тракторных агрегатов: курсовая устойчивость с несимметрично присоединенным полунавесным плугом / Г. С. Горин [и др.] // Сельскохозяйственные машины и технологии. 2017. № 5. С. 3–9. URL: http://www.vimsmit.com/jour/article/view/204
-
3. Пархоменко С. Г., Пархоменко Г. Ф. Измерение силы тяги на крюке трактора в агрегате с навесной сельскохозяйственной машиной // Тракторы и сельхозмашины. 2016. № 4. С. 15–18. URL: https://elibrary.ru/item.asp?id=25871252
-
4. Анализ тягового сопротивления элементов цилиндроидального плужного корпуса / Я. П. Лобачевский [и др.] // Сельскохозяйственные машины и технологии. 2016. № 2. С. 11–15. URL: http://docplayer.ru/73191784-Novye-tehnologii-i-oborudovanie-analiz-tyagovogo-soprotivleniya-elementov-cilindroidalnogo-pluzhnogo-korpusa.html
-
5. Мясищев Д. Г., Незговоров С. В. Проектирование мотоблоков с учетом требований эргономики // Тракторы и сельскохозяйственные машины. 1996. № 12. С. 20–21.
-
6. Kaufman L. C., Totten D. S. Development of an inverting moldboard plow // Transactions of the ASAE. 1992. Vol. 15, Issue 1. P. 55–60. DOI: https://doi.org/10.13031/2013.37828
-
7. Патент 20090751 Республика Беларусь, МПК G01L 5/13. Устройство для пространственного динамометрирования корпусов оборотного плуга / А. В. Захаров, Г. С. Горин, И. О. Захарова, А. В. Ващула; заявл. 11.09.2009; опубл. 30.04.2010, бюл. № 34. URL: http://bypatents.com/4-u6200-ustrojjstvo-dlya-prostranstvennogo-dinamometrirovaniya-korpusov-oborotnogo-pluga.html
-
8. Патент РФ № 2566398. Установка для объемного тензометрирования / В. И. Мяленко; заявл. 26.05.2014, опубл. 27.10.2015. Бюл. № 2015. URL: http://www.findpatent.ru/patent/256/2566398.html
-
9. Мяленко В. И., Маринов Н. А. Пространственное динамометрирование рабочих органов почвообрабатывающих агрегатов // Сельскохозяйственные машины и технологии. 2017. № 5. С. 22–26. DOI: https://doi.org/10.22314/2073-7599-2017-5-22-26
-
10. Kuczewski J. Soil parameters for predicting the draught of model plough bodies // Journal of Agricultural Engineering Research. 1981.Vol. 26, Issue 3. P. 193–201. DOI: https://doi.org/10.1016/0021-8634(81)90104-9
Поступила 31.05.2018; принята к публикации 27.07.2018; опубликована онлайн 20.09.2018
Об авторах:
Заявленный вклад соавторов:
В. Ф. Купряшкин – научное руководство, формулирование основной концепции исследования, подготовка начального варианта текста и формирование выводов, литературный и патентный анализ, теоретическое обосновании конструкции модуля для динамометрирования; А. С. Уланов – проведение лабораторных исследований плуга мотоблока; обработка результатов эксперимента, компьютерные работы, визуализация, верстка и редактирование текста; Н. И. Наумкин – участие в теоретических исследованиях, проведение критического анализа исследования и доработка текста.
Все авторы прочитали и одобрили окончательный вариант рукописи.
-
1. Kupryashkin V. F., Kukhmazov K. Z., Glotov S. V., Ulanov A. S. Motoblock with infinitely variable speed regulation. Selskiy mekhanizator = Rural Mechanizer. 2017; 12:22–23 (In Russ.)
-
2. Gorin G. S., Godzhaev Z. A., Golovach V. M., Kuzmin V. A. Dynamics of machine-tractor aggregates: course stability with asymmetrically attached semi-mounted plow. Selskokhozyaystvennye mashiny i tekhnologii = Agricultural Machines and Technologies. 2017; 5:3–9 Available at: http:// www.vimsmit.com/jour/article/view/204 (In Russ.)
-
3. Parkhomenko S. G., Parkhomenko G. F. Measurement of the traction force on the hook of the tractor in an aggregate with a mounted agricultural machine. Traktory i selkhozmashiny = Tractors and Agricultural Machinery. 2016; 4:15–18. Available at: https://elibrary.ru/item.asp?id=25871252 (In Russ.)
-
4. Lobachevsky Y. P., Kolmogortsev V. F., Starovoitov S. I., Hramovskikh K. A. Analysis of the traction resistance of the elements of the cylinder-cylindrical plow hull. Selskokhozyaystvennye mashiny i tekhnologii = Agricultural machines and technologies. 2016; 2:11–15 Available at: http:// docplayer.ru/73191784-Novye-tehnologii-i-oborudovanie-analiz-tyagovogo-soprotivleniya-elementov-cilindroidalnogo-pluzhnogo-korpusa.html (In Russ.)
-
5. Myasishchev D. G. Nezgovorov S. V. Design of motoblocks taking into account the requirements of ergonomics. Traktory i selskokhozyaystvennye mashiny = Tractors and agricultural machines. 1996; 12:20–21 (In Russ.)
-
6. Kaufman L. C., Totten D. S. Development of an inverting mouldboard plow. Transactions of the ASAE. 1992: 15(1):55–60. DOI: https://doi.org/10.13031/2013.37828
-
7. Patent 20090751. Republic of Belarus, MPC G 01 L 5/13. The device for spatial dynamometry of the hulls of the reversible plow. Zakharov A. V., Gorin G. S., Zakharova I. O., Vashchula A. V.; Belarus State Agrarian Technical University. No. U 6200; declared. 11/09/2009; published 30.04.2010, Bul. no 34. Available at: http://bypatents.com/4-u6200-ustrojjstvo-dlya-prostranstvennogo-dinamometrirovaniya-korpusov-oborotnogo-pluga.html (In Russ.)
-
8. Patent 256398. Russian Federation. Installation for volumetric strain gauging. Myalenko V. I.; declared 26.05.2014, published 27.10.2015. Bul. no. 2015. Available at: http://www.findpatent.ru/ patent/256/2566398.html (In Russ.)
-
9. Myalenko V. I., Marinov N. A. Spatial dynamometry of the working parts of soil-processing aggregates. Selskokhozyaystvennye mashiny i tekhnologii = Agricultural Machines and Technologies. 2017; 5:22–26. DOI: https://doi.org/10.22314/2073-7599-2017-5-22-26 (In Russ.)
-
10. Kuczewski I. Soil parameters for predicting the draught of model plough bodies. Journal of Agricultural Engineering Research. 1981; 26(3):193–201. DOI: https://doi.org/10.1016/0021-8634(81)90104-9
Список литературы Обоснование конструкции динамометрического модуля для исследования лемешно-отвального плуга мотоблока и его практическая апробация с использованием технологий реверс-инжиниринга
- Мотоблок с бесступенчатым регулированием скорости/В. Ф. Купряшкин //Сельский механизатор. 2017. № 12. С. 22-23.
- Динамика машинно-тракторных агрегатов: курсовая устойчивость с несимметрично присоединенным полунавесным плугом/Г. С. Горин //Сельскохозяйственные машины и технологии. 2017. № 5. С. 3-9. URL: http://www.vimsmit.com/jour/article/view/204
- Пархоменко С. Г., Пархоменко Г. Г. Измерение силы тяги на крюке трактора в агрегате с навесной сельскохозяйственной машиной//Тракторы и сельхозмашины. 2016. № 4. С. 15-18. URL: https://elibrary.ru/item.asp?id=25871252
- Анализ тягового сопротивления элементов цилиндроидального плужного корпуса/Я. П. Лобачевский //Сельскохозяйственные машины и технологии. 2016. № 2. С. 11-15. URL: http://docplayer.ru/73191784-Novye-tehnologii-i-oborudovanie-analiz-tyagovogo-soprotivleniya-elementov-cilindroidalnogo-pluzhnogo-korpusa.html
- Мясищев Д. Г., Незговоров С. В. Проектирование мотоблоков с учетом требований эргономики//Тракторы и сельскохозяйственные машины. 1996. № 12. С. 20-21.
- Kaufman L. C., Totten D. S. Development of an inverting moldboard plow//Transactions of the ASAE. 1992. Vol. 15, Issue 1. P. 55-60. DOI: 10.13031/2013.37828
- Патент 20090751 Республика Беларусь, МПК G01L 5/13. Устройство для пространственного динамометрирования корпусов оборотного плуга/А. В. Захаров, Г. С. Горин, И. О. Захарова, А. В. Ващула; заявл. 11.09.2009; опубл. 30.04.2010, бюл. № 34. URL: http://bypatents.com/4-u6200-ustrojjstvo-dlya-prostranstvennogo-dinamometrirovaniya-korpusov-oborotnogo-pluga.html
- Патент РФ № 2566398. Установка для объемного тензометрирования/В. И. Мяленко; заявл. 26.05.2014, опубл. 27.10.2015. Бюл. № 2015. URL: http://www.findpatent.ru/patent/256/2566398.html
- Мяленко В. И., Маринов Н. А. Пространственное динамометрирование рабочих органов почвообрабатывающих агрегатов//Сельскохозяйственные машины и технологии. 2017. № 5. С. 22-26. DOI: 10.22314/2073-7599-2017-5-22-26
- Kuczewski J. Soil parameters for predicting the draught of model plough bodies//Journal of Agricultural Engineering Research. 1981.Vol. 26, Issue 3. P. 193-201. (81)90104-9 DOI: 10.1016/0021-8634
