Обоснование конструкции стенда для динамических испытаний ведущих колес транспортно-технологических машин АПК

Автор: Уланов Александр Сергеевич, Купряшкин Владимир Федорович, Наумкин Николай Иванович, Тимохин Сергей Викторович, Гусев Александр Юрьевич, Купряшкин Владимир Владимирович
Журнал: Инженерные технологии и системы @vestnik-mrsu
Рубрика: Технологии и средства механизации сельского хозяйства
Статья в выпуске: 1, 2022 года.
Бесплатный доступ
Введение. Развитие технического обеспечения сельскохозяйственного производства подразумевает создание новых рабочих органов и машин для обработки почвы, их совершенствование и исследование. Этот процесс связан с применением почвенных каналов и экспериментальных установок, помогающих определить характер взаимодействия рабочих органов и колесных движителей сельскохозяйственных машин, в том числе средств малой механизации, с почвой. Целью данного исследования является обоснование конструкции стенда для испытаний рабочих органов почвообрабатывающих агрегатов и колес транспортно-технологических машин в агропромышленном комплексе. Материалы и методы. С целью получения достоверных экспериментальных данных взаимодействия колесных движителей средств малой механизации с почвой был дан анализ базовой конструкции экспериментального стенда для исследования рабочих органов сельскохозяйственных машин. Определены требования, предъявляемые к экспериментальному стенду. Разработан и изготовлен экспериментально-измерительного комплекс «Почвенный канал» на базе производственных площадей кафедры мобильных энергетических средств и сельскохозяйственных машин имени профессора А. И. Лещанкина Института механики и энергетики МГУ им. Н. П. Огарёва. Результаты исследования. Проанализирован подвижный модуль экспериментального стенда, обосновано техническое решение по обеспечению равномерности его движения и произведен выбор типоразмера электромагнитного порошкового тормоза. Разработана кинематическая схема и опытный образец подвижного модуля экспериментального стенда для исследования ведущих колес мотоблоков. Обсуждение и заключение. Усовершенствование конструкции почвенного канала путем внедрения в него съемного модуля обеспечит проведение испытаний не только активных, тяговых и тягово-приводных рабочих органов почвообрабатывающих машин, но и позволит исследовать характер взаимодействия их ведущих колес с почвой, осуществляя одновременный контроль силы тяги и буксования. Эти данные могут быть использованы для модернизации существующих машин и рабочих органов, а также для разработки новых агрегатов.
Обработка почвы, рабочие органы, колесные движители, почвенный канал, экспериментальный стенд, подвижный модуль, тягово-сцепные свойства, порошковый тормоз
Короткий адрес: https://sciup.org/147237267
IDR: 147237267 | УДК: 621.45.2.018.2
Rationale for the design of the stand for dynamic testing of drive wheels of agricultural transport and technological machines
Introduction. The development of agricultural production technical support implies the creation of new working tools and machines for soil treatment, and their improvement and research. This process is continuously associated with the use of soil channels and experimental facilities that help to determine the nature of interaction of working elements and wheeled drivers of agricultural machinery, including means of small-scale mechanization, with the soil. The purpose of this study is to provide the rationale for the design of the stand for testing the working elements of tillage units and wheels of transport and technological machines in the agro-industrial complex. Materials and Methods. In order to obtain reliable experimental data on the interaction of wheeled propellers of small-scale mechanization with the soil, the analysis of the basic design of the experimental stand to study the working elements of agricultural machinery was conducted. The requirements for the experimental stand were defined. The experimental-measuring complex “Soil Channel” was developed and manufactured on the basis of production facilities of the Prof. Leshchankin Chair of Mobile Power Tools and Agricultural Machinery of the Institute of Mechanics and Power Engineering of National Research Mordovia State University. Results. The analysis of ensuring the stability of translational motion of the experimental stand movable module is given, the technical solution to ensure the uniformity of its motion is substantiated and the choice of the electromagnetic powder brake type size is made. The kinematic diagram and a prototype of the movable module of the experimental stand for the investigation of the driving wheels of power tillers are developed. Discussion and Conclusion. Improvement of the soil channel design by introducing a removable module into it, will provide tests not only of active, traction and traction-driven working tools of tillage machines, but will also allow studying the nature of interaction of their driving wheels with the soil, carrying out simultaneous control of traction force and slipping. These data can be used for modernization of existing machines and working tools, and for developing new units.
Текст научной статьи Обоснование конструкции стенда для динамических испытаний ведущих колес транспортно-технологических машин АПК
Развитие технического обеспечения сельскохозяйственного производства должно быть направлено на внедрение энергосберегающих технологий. Среди них использование комбинированных почвообрабатывающих агрегатов, создание новой техники и замена устаревшей, модернизация машин и рабочих органов и др.
Создание, усовершенствование и исследование новых рабочих органов и машин для обработки почвы неразрывно связано с применением почвенных каналов и экспериментальных установок. Их конструкции в обязательном порядке должны учитывать все возможные факторы проведения исследований: влажность почвы, ее твердость и состав, глубина обработки, поступательная скорость агрегатов, буксование колесных движителей1. Важно иметь возможность находить величины сил, которые действуют на рабочие поверхности почвообрабатывающих орудий и их элементы (например лемешно-отвальную поверхность плуга, режущую кромку ножа фрезерного барабана и др.), или определять тягово-сцепные характеристики колесных движителей транспортно-технологических машин [1–4].
В настоящее время различные конструкции почвенных каналов применяются для определения силовых характеристик, действующих на рабочие части и элементы существующих и модернизированных сельскохозяйственных машин и агрегатов, в том числе средств малой механизации. Эти конструкции могут быть оснащены разного рода экспериментальными установками, модулями и стендами.
Целью данного исследования является обоснование конструкции экспериментального стенда для испытаний рабочих органов почвообрабатывающих агрегатов и колес транспортнотехнологических машин в агропромышленном комплексе.
Обзор литературы
Ученые Пензенского ГАУ и Всероссийского научно-исследовательского института механизации сельского хозяйства (г. Москва) разработали и изготовили передвижной почвенный канал (рис. 1) [5].
Его конструкция позволяет проводить исследования рабочих органов сельскохозяйственных машин в полевых естественных условиях, что является положительным фактором. Среди недостатков – ограниченность
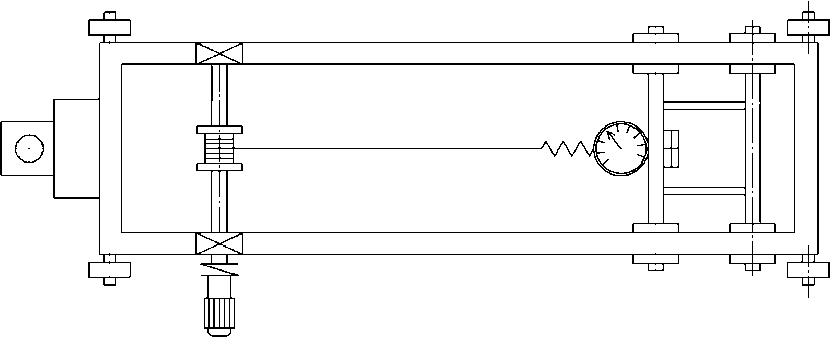
Р и с. 1. Схема передвижного почвенного канала
F i g. 1. Diagram of a mobile soil channel
в определении силовых показателей взаимодействия рабочих органов с почвой, только в продольно-горизонтальной плоскости (по ходу движения), и отсутствие возможности исследовать активные рабочие органы и колесные движители.
Круговой почвенный канал разработан в ФГБНУ «Федеральный научный агроинженерный центр ВИМ» (рис. 2) [6]. Он состоит из каркаса 1 , механизма привода 2 , уплотнительных катков 3 , грузов 4 , рыхлителей почвы 5 , емкости с водой 6 и приспособления для установки испытуемого образца 7 .
Изобретение относится к стендам для испытаний почворежущих элементов сельскохозяйственных машин и позволяет повысить точность экспериментов на 10–15 % по отношению к другим испытательным установкам.
Однако такая схема конструкции почвенного канала не позволяет определить силы, действующие на рабочие органы сельскохозяйственных машин (корпус плуга, стойку культиватора и пр.), с ее помощью можно исследовать только изнашивание почворежущих лезвий (лемехов, стрельчатых лап и пр.).
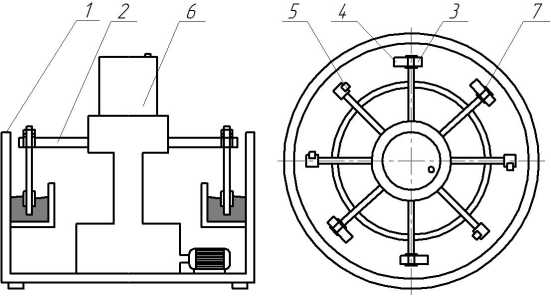
Р и с. 2. Схема кругового почвенного канала для исследований по изнашиванию почворежущих лезвий
F i g. 2. Diagram of a circular soil channel for research on the wear of soil-cutting blades
Фирмы ООО НПП «Учтех-Про-фи» (г. Москва), ООО «Профкабинет» и ООО «Новый стиль» (г. Ярославль) предлагают конструкции почвенных каналов2. С их помощью можно определить качественные показатели обработки почвы, изучить конструкции и принципы работы почвообрабатывающих машин, а также провести испытания. К положительным сторонам данных конструкций следует отнести их компактность и мобильность, возможность имитации различных условий состояния почвы с анализом их влияния на работу почвообрабатывающих машин, а также высокую оснащенность программного обеспечения.
Однако анализ технических характеристик представленных каналов показал, что мощность их силовых установок (не более 2,5 кВт), рабочий ход тележки (2,7 м) и ее скорость (от 0 до 2,45 км/ч) не удовлетворяют требованиям к испытаниям элементов большинства почвообрабатывающих машин и агрегатов, применяемых в сельском хозяйстве. Это является существенным недостатком и может приводить к искажению или некорректным показаниям, полученным в ходе испытаний.
Обзор литературы показал, что большинство почвенных каналов не подходят для вычисления сил, которые действуют на рабочие органы и составные элементы существующих почвообрабатывающих машин [7; 8]. Они также не способны определить тягово-сцепные характеристики колесных движителей [9; 10].
Подводя итог анализа конструкций почвообрабатывающих агрегатов, их ведущих колес, условий функционирования и современных методик проведения исследований, можно сформулировать следующие требования к экспериментальному стенду для испытания ведущих колес почвообрабатывающих машин, в том числе и малогабаритных, к числу которых относятся и средства малой механизации, в частности мотоблоки:
– универсальность конструкции, то есть возможность проводить исследования ведущих пневматических колес и колес с металлическими грунтозацепами;
-
– обеспечение изменения сцепного веса на испытуемых колесах;
-
- обеспечение изменения угла наклона оси вращения испытуемого колеса;
– обеспечение бесступенчатого регулирования поступательной скорости движения и частоты вращения приводного вала испытуемого коле-са3 [11–14].
Материалы и методы
Для решения сформулированных выше задач на базе Института механики и энергетики МГУ им. Н. П. Огарёва разработан и изготовлен экспериментально-измерительный комплекс «Почвенный канал» (рис. 3), представляющий
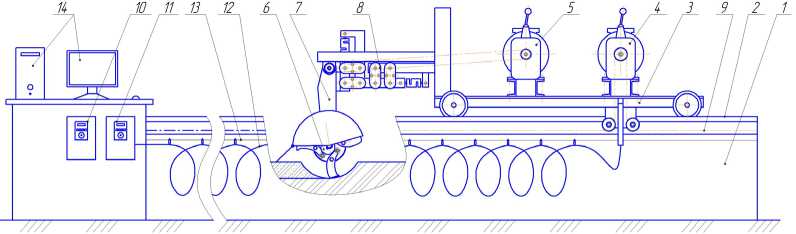
Р и с. 3. Общее устройство экспериментального стенда
F i g. 3. The general structure of the experimental stand
собой почвенный канал 1 , в верхней части которого закреплен рельсовый путь 2 . По нему перемещается подвижный модуль 3 с установленными на нем электрическими приводом перемещения модуля 4 и приводом 5 испытуемых активных рабочих органов (АРО) 6 почвообрабатывающих машин, установленных на приводных валах цепного редуктора 7 . Цепной редуктор 7 закреплен на динамометрическом модуле 8 , зафиксированном на подвижном модуле 3 . Перемещение подвижного модуля 3 осуществляется при помощи привода 4 и цепи 9 , закрепленной на почвенном канале 1 . Управление двигателями привода 4 подвижного модуля 3 и приводом 5 испытуемых АРО 6 обеспечивается от преобразователей частоты 10 и 11 через питающий электрический кабель 12 , подвешенный на стальном тросе 13 . Сигнал с датчиков модуля 8 поступает на автоматизированный измерительный комплекс 14 с последующей обработкой.
Из анализа конструкции экспериментального стенда следует, что при условии установки на приводных валах цепного редуктора испытуемых ведущих колес он будет соответствовать требованиям, предъявляемым к экспериментальному стенду и сформулированным выше.
Однако вопрос изменения угла наклона оси вращения испытуемого колеса требует решения [15]. Как показывают исследования, при испытаниях АРО почвообрабатывающих машин из-за подталкивающего эффекта возникает необходимость стабилизации ‒ обеспечения равномерности движения подвижного модуля4.
Результаты исследования
В случае испытания ведущих колес мотоблока будет возникать сила тяги, которая, так же как и подталкивающие силы, возникающие на АРО при их взаимодействии с почвой, предположительно, будет вызывать нарушение устойчивости движения модуля. В связи с этим рассмотрим условие устойчивого движения подвижного модуля (рис. 4). Для этого используем методику, изложенную в одном из наших предыдущих исследований [14].
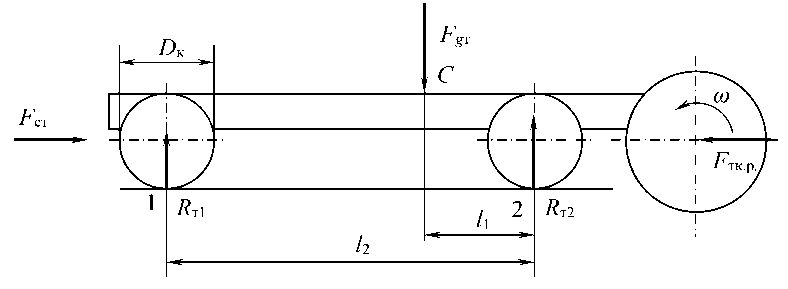
Р и с. 4. Схема нагружения подвижного модуля
F i g. 4. Loading scheme of the mobile module
Из рисунка 4 следует, что для исключения отрицательного влияния подталкивающего усилия на устойчивое движение подвижного модуля необходимо выполнение условия
F :T ^ F c.p. , (1)
где F ст – суммарная сила сопротивления перекатыванию модуля, Н; Fтк.р. – расчетная сила тяги на колесе мотоблока, Н; примем F тк.р. = F тк max / 2 = = 1 200 / 2 = 600 Н (здесь F тк max – максимальная сила тяги, развиваемая мотоблоком, Н; в предыдущих исследованиях было выяснено, что F тк max = = 1 200 Н)5 [16].
Определим значение силы F ст. Для рисунка 4 силу сопротивления F ст вычисляем по формуле
-
F, = F .1 + F ;t2 , (2)
где F ст1 и F с т2 – силы сопротивления перекатыванию передних и задних колес модуля соответственно, Н.
Учитывая рекомендации М. П. Александрова, а также результаты пре- дыдущих исследований, для колес с ребордами сила сопротивления их перекатыванию будет определяться зависимостью
-
F . = ^J ^fd- ) p , (3)
-
V D К J
где R т1 и R т2 – силы давления на передних и задних колесах модуля соответственно, Н; μ – коэффициент трения качения, мм; μ = 0,5 мм для чугунного колеса и стального рельса; f – коэффициент трения; f = 0,01 для подшипников качения; d – диаметр оси колес под подшипник, мм; d = 35 мм; D к – диаметр колес, мм; D к = 150 мм; β – коэффициент, учитывающий сопротивление от трения реборд; β = 0,5 мм6 [14; 17].
Для определения сил R т1 и R т2 воспользуемся уравнением моментов, то есть, с учетом нагружения, получим (векторы сил F ст и R x не учитываются)
2 Ma = 0,
R.1 • 12 - FgT(12 - 11) = 0,
R2 = FgT(l2 - lд/ 12, где Fgт – сила тяжести тележки, Н; l1 и l2 – расстояние от центра масс до оси задних колес и колесной базы модуля соответственно, мм; l1 = 300 мм и l2 = = 1 100 мм.
Силу тяжести, с учетом массы подвижного модуля m т = 380 кг, определим как
Fgт = gmт = 9,81.650 = 6 377 H,
R^ = 6377(1 100 - 300) /1100 = 4638 Н .
Аналогично находим значение силы R т1. Согласно рисунку 4 получаем
Z Mb = 0,
- R1 • 12 + Fg T • 11 = 0,
R 1 = F g т • 1 1 / 1 2 =
= 6 377 • 300/1 100 = 1739 H.
После последовательной подстановки в выражения (3) и (2) найденных значений получим
F :T1 = 1 739 ^ 2 " 0,5 ^5° о’01 " 35 ^ 0,5 = 8 H, F ;t2 = 4638 ^ 2 ' 0,5 ^ ^J01 ' 35 j 0,5 = 21 H,
F;t = 8 + 21 = 29 H.
После последовательной подстановки известных и найденных значений в (1) получим
FCT = 29 H < FTK = 600 H.
UI IK. .p.
Условие устойчивого движения подвижного модуля вследствие действия создаваемого тягового усилия не
Том 32, № 1. 2022
выполняется. Поэтому в дальнейшем при разработке экспериментального стенда для исследования ведущих колес мотоблока необходимо обеспечить устойчивость движения подвижного модуля.
Для решения задачи по обеспечению устойчивости движения подвижного модуля экспериментального стенда предлагается использовать динамический стабилизатор (рис. 5), представляющий собой электромагнитный порошковый тормоз, связанный цепной передачей с одним из валов подвижного модуля (рационализаторское предложение ФГБОУ ВО «МГУ им. Н. П. Огарёва» от 22.01.2018 г. № 1172 «Подвижный модуль экспериментального стенда с динамическим стабилизатором устойчивости движения для исследования почвообрабатывающих активных рабочих органов»).
Использование в качестве стабилизатора движения подвижного модуля электромагнитного порошкового тормоза позволит обеспечить его дистанционное управление и регулирование тормозного момента7 [18; 19].
Для выбора типоразмера электромагнитного порошкового тормоза проведем кинематический расчет его привода. Для этого определим передаточное отношение i цп цепной передачи привода электромагнитного порошкового тормоза [20]:
i цп = n ок / n т , (4)
где n ок – частота вращения опорных колес подвижного модуля, мин–1; n т – рабочая частота вращения вала электромагнитного порошкового тормоза, мин–1.

Р и с. 5. Динамический стабилизатор устойчивости движения подвижного модуля экспериментального стенда
F i g. 5. Dynamic stabilizer of motion stability of the mobile module of the experimental stand
Частоту вращения опорных колес n ок подвижного модуля можно определить по формуле
n
OK
60 000 v п m D K
где v п – скорость движения подвижного модуля, м/с; примем, что скорость движения подвижного модуля будет изменяться в интервале от 0,57 до 3,3 м/с.
Учитывая, что D к = 150 мм, то, согласно (5), получим
_ 60 000(0,57...3,3)
n0K " 3,14 ■ 150
= 72,6...420,4 мин-1.
Для определения n т воспользуемся характеристиками электромагнитных порошковых тормозов типа ПТ, для которых рабочий диапазон частот вращения равен n т = 25...4 000 мин–1.
Подставив nок = 72,6...420,4 мин–1 и nт = 25...4 000 мин–1 в (4), получим iцп = (72,6...420,4) / (25...4 000) =
= 0,018 …16,8.
Принимаем для дальнейших расчетов i цп = 0,37.
Тогда при nок = 72,6...420,4 мин–1, согласно (4), значение nт будет равно nт = nок/ iцп= (72,6...420,4) / 0,37 =
= 196,2…1 136,2 мин–1.
Условие выбора тормоза позаимствуем из материалов ранее проводимых исследований устойчивости движения подвижного модуля экспериментального стенда, изучающего функционирование активных ротационных рабочих органов почвообрабатывающих машин [14]:
T тр ≤ T т, (6)
где T т и T т - расчетное и табличное значение тормозного момента, Н∙м.
Значение момента T тр определим по формуле8:
T тр k т T p min , (7)
где к т - коэффициент запаса тормозного момента; к т = 1,5; T p min - расчетный минимальный тормозной момент, Н∙м [14].
Момент T min определяем с учетом особенностей конструкции привода электромагнитного порошкового тормоза и функционирования подвижного модуля по следующей формуле:
Т = F D'i 3 = pmax f 2 2
= 928 150 0,37 10 - з = 25,8 ^ . M _
После подстановки известных и рассчитываемых значений в формулу (7) получим
Т тр - 1,5 - 25,8 - 38,7 Н - м .
Далее по каталогу выбираем тормоз ПТ-6М19. Его тормозной момент Т т = 60 Н·м.
Для реализации возможности изменения угла наклона оси вращения испытуемого колеса предлагается конструкция подвижного модуля экспериментального стенда (рис. 6) [11; 21].
Предлагаемое устройство позволяет исследовать колесные движители транспортно-технологических машин на различных режимах функционирования, определяемых его частотой вращения и положением (углом наклона) относительно грунта.
Для реализации требований обеспечения изменения угла наклона оси вращения испытуемого колеса и устойчивости движения подвижного модуля обобщим полученные результаты.
На основании объединения предложенных технических решений и базовой конструкции подвижного модуля экспериментального стенда предлагается обобщенная кинематическая схема подвижного модуля, предназначенного для исследования ведущих колес средств малой механизации (рис. 7).
Подвижный модуль экспериментального стенда представляет собой раму 1 с опорными передними 2 и задними 3 колесами. На раме смонтирован электрический привод 4 перемещения подвижного модуля и электрический привод 5 , обеспечивающий вращательное движения ведущего колеса 6 , закрепленного с помощью предлагаемого съемного модуля 7 на цепном редукторе 8 . Съемный модуль 7 представляет собой закрепленный на цепном редукторе 8 кронштейн 9 с установленной в его направляющем отверстии 10 и зафиксированной гайкой 11 подшипниковой опорой 12 . При этом в подшипниковую опору 12 вмонтирован приводной вал 13 с жестко установленным на одном его конце испытуемым колесом 6 . Противоположный конец вала 13 через шарнирную угловую муфту 14 соединен с приводным валом 15 цепного редуктора 8 . Цепной редуктор 8 установлен с возможностью свободного строго вертикального перемещения на динамометрическом модуле 16 , обеспечивающем измерение тягового усилия, создаваемого на испытуемом ведущем колесе 6 .
a)

b)
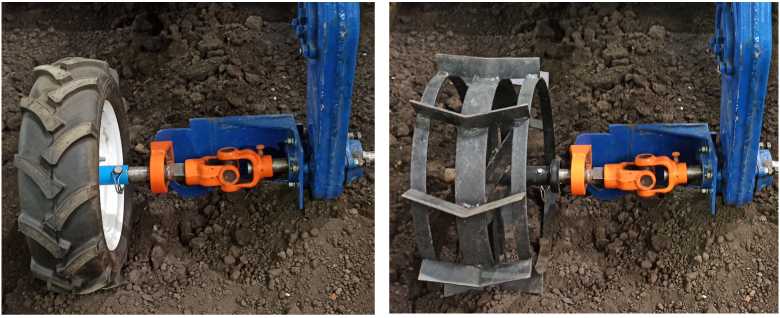
Р и с. 6. Съемный модуль для исследования силы тяги на ведущих колесах средств малой механизации: a) положение испытуемых пневматического колеса и колеса с металлическими грунтозацепами при угле наклона осей их вращения α = 0°; b) положение испытуемых пневматического колеса и колеса с металлическими грунтозацепами при угле наклона осей их вращения α = 28°
F i g. 6. Removable module for the study of traction force on the driving wheels of small mechanization vehicles: a) the position of the subjects of the pneumatic wheel and the wheel with metal ground hooks at the angle of inclination of the axes of their rotation equal to α = 0°; b) the position of the subjects of the pneumatic wheel and the wheel with metal ground hooks at the angle of inclination of the axes of their rotation equal to α = 28°
Позиция 7 (увеличено)
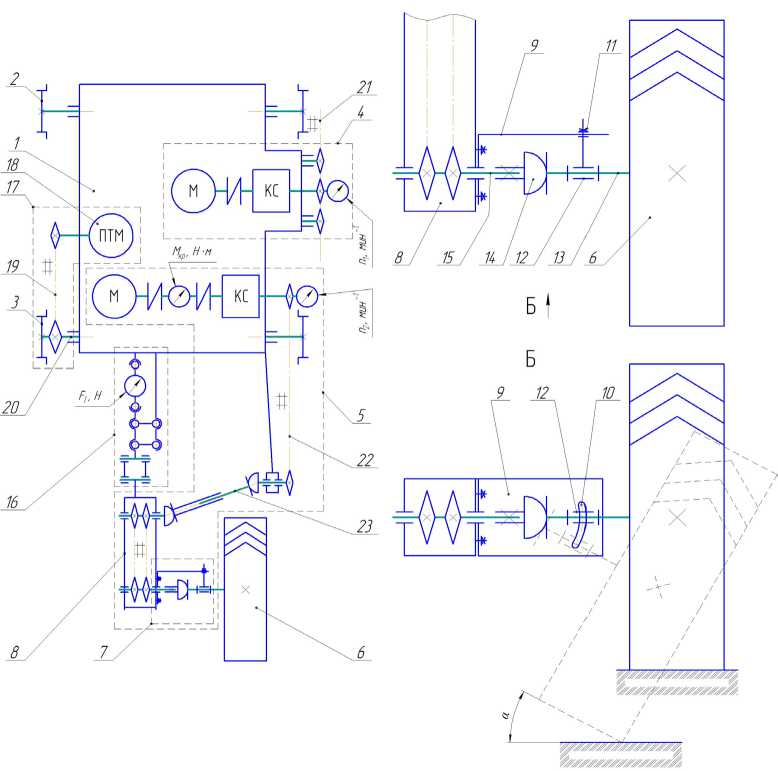
Р и с. 7. Кинематическая схема подвижного модуля экспериментального стенда для исследования силы тяги на ведущих колесах средств малой механизации
F i g. 7. Kinematic diagram of the mobile module of the experimental stand for the study of the traction force on the driving wheels of small mechanization vehicles
Такой способ установки редуктора 8 позволяет обеспечить регулировку сцепного веса на испытуемом колесе 6 за счет установки балластных грузов. При этом сам динамометрический модуль 16 жестко закреплен на раме 1 подвижного модуля [22–24]. Также на раме 1 смонтирован предлагаемый динамический 82
стабилизатор 17 , обеспечивающий стабилизацию движения подвижного модуля. Он представляет собой электромагнитный порошковый тормоз (ПТ-6М1) 18 , вал которого соединен цепной передачей 19 с валом 20 задних опорных колес 3 .
Разработаем опытный образец на основании базовой конструкции
Технологии и средства механизации сельского хозяйства
существующего подвижного модуля экспериментального стенда, предназначенного для исследования рабочих органов почвообрабатывающих машин (рис. 1). Следуют учесть предложенную кинематическую схему подвижного модуля экспериментального стенда для исследования силы тяги на ведущих колесах средств малой механизации (рис. 7) и рекомендуемые технические решения. Разработанный опытный образец, а также фрагменты его рабочих элементов представлены на рисунках 8–10.

Р и с. 8. Общий вид экспериментального стенда для исследования силы тяги на ведущих колесах средств малой механизации
F i g. 8. General view of the experimental stand for the study of the traction force on the driving wheels of small mechanization vehicles

Р и с. 9. Общий вид пульта управления электрическими двигателями приводов перемещения подвижного модуля и вращения испытуемых ведущих колес
F i g. 9. General view of the control panel for electric motors of the drives for moving the movable module and rotating the test driving wheels

Р и с. 10. Общий вид автоматизированного измерительного комплекса экспериментального стенда для сбора и обработки данных
F i g. 10. General view of the automated measuring complex of the experimental stand for data collection and processing
Обсуждение и заключение
Разработанная конструкция съемного модуля позволяет обеспечить испытание ведущих колес средств малой механизации с учетом особенностей их функционирования и контроля силы тяги. В частности, съемный модуль стенда позволяет обеспечить изменение угла наклона α оси вращения
испытуемых пневматических колес или колес с металлическими грунтозацепами относительно горизонта почвы в пределах от 0 до 28°, что позволяет охватить возможные положения испытуемых колес при выполнении основных технологических операций, в том числе и вспашки почвы на глубину до 30 см.
Кроме этого, стенд за счет свободной установки цепного редуктора позволяет обеспечить регулировку сцепного веса на испытуемом колесе путем установки балластных грузов весом 20, 40 и 60 кг.
Независимые друг от друга электрические приводы перемещения подвижного модуля и вращения испытуемого ведущего колеса позволяют бесступенчатым способом обеспечить требуемые значения поступательной скорости и частоты вращения, а также вариацию коэффициента буксования. Это происходит за счет использования для управления двигателями преобразователей частоты.
Применение в качестве стабилизатора движения подвижного модуля электромагнитного порошкового тормоза компенсирует тяговое усилие,
создаваемое работой испытуемого ведущего колеса, и стабилизирует его скорость движения. При этом использование электромагнитного порошкового тормоза позволяет обеспечить дистанционное управление и регулирование тормозного момента.
Таким образом, усовершенствование конструкции почвенного канала путем внедрения в него съемного модуля обеспечит проведение испытаний не только активных, тяговых и тягово-приводных рабочих органов почвообрабатывающих машин, но и позволит1 исследовать характер взаимодействия ведущих колес с почвой. Можно одновременно контролировать силу тяги и буксования. Эти данные могут быть использованы для усовершенствования существующих машин и рабочих органов к ним, а также для разработки новых агрегатов.
Поступила 27.12.2021; одобрена после рецензирования 26.01.2022; принята к публикации 10.02.2022
Все авторы прочитали и одобрили окончательный вариант рукописи.
Technologies and means of agricultural mechanization 87
Submitted 27.12.2021; approved after reviewing 26.01.2022; accepted for publication 10.02.2022
All authors have read and approved the final manuscript.
Список литературы Обоснование конструкции стенда для динамических испытаний ведущих колес транспортно-технологических машин АПК
- Исследование процесса взаимодействия ведущих колес трактора с грунтовой поверхностью / В. В. Гуськов [и др.] // Наука и техника. 2017. Т. 16, № 1. С. 83-88. doi: https://doi.org/10.21122/2227-1031-2017-16-1-83-88
- Osinenko P. V., Geissler M., Herlitzius T. A Method of Optimal Traction Control for Farm Tractors with Feedback of Drive Torque // Biosystems Engineering. 2015. Vol. 129. P. 20-33. doi: https://doi. org/10.1016/j.biosystemseng.2014.09.009
- Rasool S., Raheman H. Improving the Tractive Performance of Walking Tractors Using Rubber Tracks // Biosystems Engineering. 2018. Vol. 167. P. 51-62. doi: https://doi.org/10.1016/j.biosystemseng.2017.12.013
- Importance of Short-Term Temporal Variability in Soil Physical Properties for Soil Water Modelling under Different Tillage Practices [Электронный ресурс] / J. Geris [et al.] // Soil and Tillage Research. 2021. Vol. 213. doi: https://doi.org/10.1016/j.still.2021.105132
- Емельянов П. А., Сибирёв А. В., Аксенов А. Г. Эффективность применения передвижного почвенного канала при проведении лабораторных исследований // Вестник Красноярского ГАУ 2013. № 10. С. 216-219. URL: https://clck.ru/arrdY (дата обращения: 11.11.2021).
- Круговой почвенный стенд : патент 2613292 Российская Федерация / Сидоров С. А., Миронов Д. А., Лискин И. В. № 2015154117 ; заявл. 17.12.2015 ; опубл. 15.03.2017. URL: https://patenton. ru/patent/RU2613292C1 (дата обращения: 10.02.2021).
- Устройство для испытания рабочих органов в почвенном канале : патент 960569 СССР / Мясников Ю. А. [и др.]. № 2015154117 ; заявл. 29.04.1981; опубл. 23.09.1982. URL: https://yandex. ru/patents/doc/SU960569A1_19820923 (дата обращения: 10.11.2021).
- Почвенный канал : патент 244670 СССР / Бацуев Г. А. [и др.]. № 1220415/30-15 ; заявл. 12.11.1968 ; опубл. 28.05.1969. URL: https://yandex.ru/patents/doc/SU244670A1_19690528 (дата обращения: 10.11.2021).
- Обоснование режимов работы пахотного агрегата на базе мотоблока «Нева» МБ-23-МУЛЬ-ТИАГРО Pro с плугом П1-20/3 по критерию отсутствия буксования ведущих колес с почвой / В. Ф. Купряшкин [и др.] // Вестник НГИЭИ. 2019. № 7. С. 5-15. URL: https://yadi.sk/i/BJtkW-_KB3l-5HQ (дата обращения: 05.12.2021).
- Ucgul M., Saunders C. Simulation of Tillage Forces and Furrow Profile during Soil-Mouldboard Plough Interaction Using Discrete Element Modelling // Biosystems Engineering. 2020. Vol. 190. P. 58-70. doi: https://doi.org/10.1016/j.biosystemseng.2019.11.022
- Стенд для определения силы тяги на ходовых колесах малогабаритной техники / B. Ф. Купряшкин [и др.] // Сельский механизатор. 2019. № 2. С. 38-39. URL: http://www.selmech. msk.ru/219.html (дата обращения: 11.11.2021).
- Narang S., Varshney A. C. Draftability of a 8.95 kW Walking Tractor on Tilled Land // Journal of Terramechanics. 2006. Vol. 43, Issue 4. P. 395-409. doi: https://doi.org/10.1016/jjterra.2005.04.006
- Balappa B. U., Lokesh A. C., Babu N. C. M. Development of Semi-Automated Sowing Machine for Multiple Crops // Materials Today: Рroceedings. 2021. Vol. 42. Р. 1317-1320. doi: https://doi. org/10.1016/j.matpr.2020.12.1147
- Купряшкин В. Ф., Наумкин Н. И., Купряшкин В. В. Исследование устойчивости движения подвижного модуля экспериментальной установки при испытании активных ротационных рабочих органов почвообрабатывающих машин // Вестник Мордовского университета. 2016. Т. 26, № 2. C. 246-258. doi: https://doi.org/10.15507/0236-2910.026.201602.246-258
- Основы статической устойчивости мотоблока с лемешно-отвальным плугом [Электронный ресурс] / А. С. Уланов и [др.] // Журнал E-SCIO. 2019. № 12. URL: https://clck.ru/as9uX (дата обращения: 11.09.2021).
- Разработка подвижного модуля экспериментального стенда для определения тягово-сцеп-ных свойств колесных движителей и результаты лабораторных исследований силы тяги на ведущих колесах мотоблока / В. Ф. Купряшкин [и др.] // Инженерные технологии и системы. 2021. Т. 31, № 1. С. 143-160. doi: https://doi.org/10.15507/2658-4123.031.202101.143-160
- Черноус Д. А. Уточнение расчетной оценки коэффициента трения качения // Механика. Исследования и инновации. 2019. № 12. С. 198-205. URL: https://elibrary.ru/item.asp?id=42417376 (дата обращения: 11.11.2021).
- Чиннов А. А., Курдов А. В. Коэффициент трения при качении со скольжением // Аллея науки. 2020. Т. 1, № 1. С. 226-230. URL: https://clck.ru/dXnP7 (дата обращения: 13.11.2021).
- Баханович А. Г., Кусяк В. А., Ле Ван Нгиа. Исследование работоспособности электронной системы управления порошковым электромагнитным тормозом // Механика машин, механизмов и материалов. 2018. № 1. С. 21-28. URL: https://elibrary.ru/item.asp?id=32651655 (дата обращения: 11.11.2021).
- Белоусов Ю. В. Методика определения оптимальных параметров цепной передачи конструкции приводной цепи // Вестник Российского университета дружбы народов. Серия: Инженерные исследования. 2021. Т. 22, № 1. С. 72-83. doi: https://doi.org/10.22363/2312-8143-2021-22-1-72-83
- Подвижный модуль испытательного стенда : патент 188610 Российская Федерация / Купряшкин В. Ф., Уланов А. С., Купряшкин В. В. № 2019102333 ; заявл. 29.01.2019 ; опубл. 17.04.2019. 5 с. URL: https://yandex.ru/patents/doc/RU188610U1_20190417 (дата обращения: 10.11.2021).
- Обоснование конструкции динамометрического модуля для исследования лемешно-отваль-ного плуга мотоблока и его практическая апробация с использованием технологий реверс-инжиниринга / В. Ф. Купряшкин [и др.] // Вестник Мордовского университета. 2018. Т. 28, № 3. С. 400-415. doi: https://doi.org/10.15507/0236-2910.028.201803.400-415
- Method and System of Plowing Depth Online Sensing for Reversible Plough / Y. Yin [et al.] // IFAC-PapersOnLine. 2018. Vol. 51, Issue 17. Р. 326-331. doi: https://doi.org/10.1016/j. ifacol.2018.08.199
- Influence of the Speed on Soil-Pressure over a Plough / М. Mattetti [et al.] // Biosystems Engineering. 2017. Vol. 156. P. 136-147. doi: https://doi.org/10.1016/j.biosystemseng.2017.01.009
