Обоснование необходимости создания систем дискретного гидропривода с тонким формированием импульсов расхода

Автор: Дорошенко И.В.
Журнал: Горные науки и технологии @gornye-nauki-tekhnologii
Рубрика: Строительство горных предприятий и освоение подземного пространства
Статья в выпуске: 3, 2017 года.
Бесплатный доступ
Создание машин для тяжелых условий горнопроходческих работ невозможно без решения задач, связанных с приводом. Широко используемый гидропривод имеет ряд недостатков, которые не могут сделать его однозначно приемлемым. Более успешным считается электропривод, использующий преимущества шагового электропривода, но и его область применения ограничена параметрами гидродвигателей. Вот почему необходимо создание так называемого дискретного гидпропривода, который позволил бы формировать импульсы малых объемов с высокими частотами для перемещения выходных звеньев на заданные расстояния с высокой точностью в широком диапазоне скоростей. Это и определяет актуальность рассматриваемой научно-практической задачи. Применение объемного дозатора для решения поставленной задачи позволит обеспечить жесткую связь подачи рабочей жидкости с угловой скоростью, а объема жидкости - с углом поворота ротора, при этом величина импульса расхода будет определяться рабочим объемом рабочей камеры. Применение дозаторов позволит реализовать системы дискретного гидропривода, однако для его окончательного внедрения необходимо обосновать динамические и геометрические параметры устройства, а также схемотехнические решения применения подобных дозаторов.
Горнопроходческие работы, геоход, гидропривод, электропривод
Короткий адрес: https://sciup.org/140230110
IDR: 140230110 | DOI: 10.17073/2500-0632-2017-3-11-15
Substantiation of the need to create discrete hydraulic drive systems with a thin formation of flow pulses
The creation of machines for heavy mining conditions is impossible without solving the problems associated with the drive. The widely used hydraulic drive has a number of drawbacks that can not make it uniquely acceptable. More successful is the electric drive, which takes advantage of the stepping electric drive, but its scope is limited by the parameters of the hydraulic motors. That is why it is necessary to create a so-called discrete hydro motor drive that would allow generating pulses of small volumes with high frequencies to move the output links to specified distances with high accuracy in a wide range of speeds. This determines the relevance of the scientific and practical task under consideration. Conclusion: the use of dispensers will allow the implementation of discrete hydraulic drive systems, but for its final implementation it is necessary to justify the dynamic and geometric parameters of the device, as well as circuit solutions for the use of such dispensers.
Текст научной статьи Обоснование необходимости создания систем дискретного гидропривода с тонким формированием импульсов расхода
Строительству современных машин требует создания систем управления движением выходных звеньев механизмов в широком диапазоне скоростей и с высокой точностью. Все чаще возникает необходимость формирования сложных движений в автоматическом режиме. В большинстве случаев движение по кри- волинейной траектории формируется суммированием двух или более движений по конструктивно определенным координатам (рис. 1). Это обусловливает необходимость изменения скорости по координате от нуля до максимального значения.
а

б
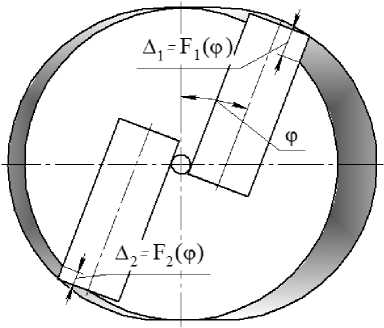
Рис. 1. Управление движением исполнительного органа геохода: а – геоход, вид на исполнительный орган, б – формирование движения исполнительного органа геохода по двум координатам
При создании машин для работы в тяжелых условиях широко применяется гидропривод [11-19]. Очевидно, что скорость движения в гидроприводе определяется скоростью подачи рабочей жидкости, а величина перемещения - поданным объемом. Именно этими двумя параметрами и должна управлять гидроаппара- тура, причем и объемом желательно управлять напрямую.
Широкое распространение получили такие гидроаппараты, как направляющие и дросселирующие гидрораспределители, дроссели, регуляторы расхода, гидрозамки и др. [1, 2]. Перечисленные гидроаппараты и их схемные комбинации способны непосредственно управлять подачей рабочей жидкости к гидродвигателю, но непосредственно управлять количеством поданной жидкости они не могут.
Автоматическое управление обычно осуществляется с применением дросселирующих (пропорциональных) гидрораспределителей [1,2], в которых скорость подачи определяется величиной смещения золотника, а количество – смещением и временем смещения в комплексе. На пути от управляющего сигнала (например, электрического) до смещения золотника встречаются случайные факторы, такие как облитерация, зависимость вязкости от температуры, колебания давления, непостоянство жесткости центрирующих пружин и другие, что делает невозможным точное предсказание результата. Кроме того, имеются системные факторы: электромагнитная инерция, механическая инерция золотника и сердечников электромагнитов, характеристики жесткости гидросистемы, что приводит к запаздыванию отклика и снижению быстродействия системы управления. Все это в купе с тем, что количество поданной жидкости определяется величиной сигнала и временем его действия, ограничивает область применения таких систем, предъявляет высокие требования к обратной связи, делает невозможной работу «вслепую», т.е. без прямого контроля результата.
Примером проявления проблем, связанных с необходимостью обратной связи, может послужить опыт, приобретенный при испытаниях опытного образца геохода модели 401 [3 - 5]. Одна из управляющих функций в геоходе реализуется радиальным смещением барабанов [6, 7] исполнительного органа (рис. 1, б ). Контроль положения определяется герконовым стержнем с передачей сигнала по радиомодему. Отклик гидропривода на сигнал модема происходит с незначительной задержкой, что приводит к ошибкам в определении истинного положения барабанов, нестабильности их траектории и снижению маневренности машины.
Похожие задачи существуют не только в гидро-, но и в электроприводе. В электроприводе задача решается применением шаговых электродвигателей. В шаговом приводе скорость жестко связана с частотой импульсов, а величина перемещения с их количеством, т.е. система управления способна непосредственно задавать оба параметра. Это снижает требования к обратной связи или даже позволяет иногда обходиться без неё. Но электропривод, по сравнению с гидроприводом, имеет худшие массогабаритные и силовые характеристики, восприимчив к внешним динамическим воздействиям, и область его применения ограничена сравнительно небольшими усилиями и моментами.
Для достижения значительных усилий или моментов применяют системы электрогидравлического привода (рис. 2) [8]. В таком «тандеме» гидропривод «копирует» работу шагового электропривода, его область применения ограничена параметрами гидродвигателя, поэтому задачи управляющей гидроаппаратуры не могут быть решены.
Необходимо создать системы автоматического гидропривода, которые позволят снизить требования к обратной связи и сделать возможной отработку перемещения выходных звеньев на заданные расстояния с высокой точностью в широком диапазоне скоростей. Нужны гидроаппараты, которые формируют объем поданной рабочей жидкости напрямую, а не перемножением подачи на время.
Известны системы дискретной подачи рабочей жидкости (рис. 3) [2], состоящие из дозатора 1 и коммутирующих гидроаппаратов 2 - 4 . В них объем поданной жидкости определяется непосредственно количеством переключений распределителя 4 и объемом дозатора 1 . Наличие коммутирующих гидроаппаратов вносит погрешность в объем разового импульса, а принцип работы не позволяет формировать импульсы малых объемов с высокими частотами, что сильно ограничивает возможности регулирования.
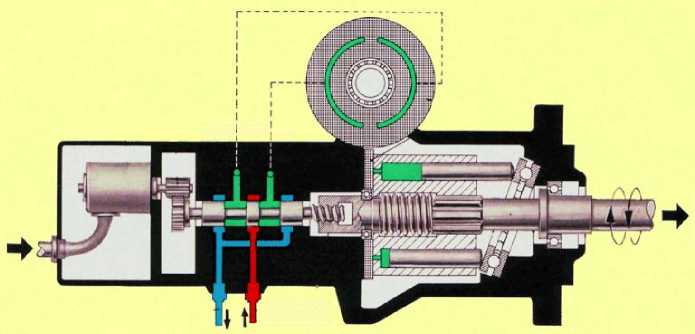
Рис. 2. Шаговый электрогидропривод
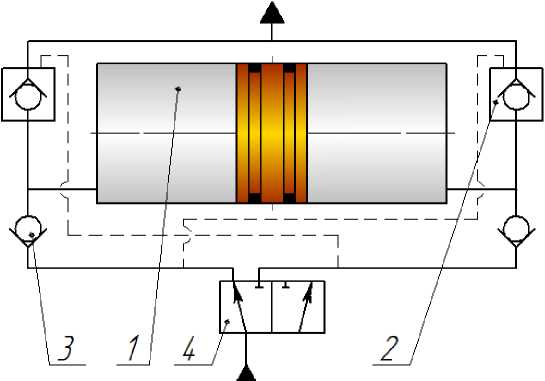
Рис. 3. Система дискретной подачи рабочей жидкости:
1 - дозатор, 2 - гидрозамок, 3 - обратный клапан, 4 - гидрораспределитель
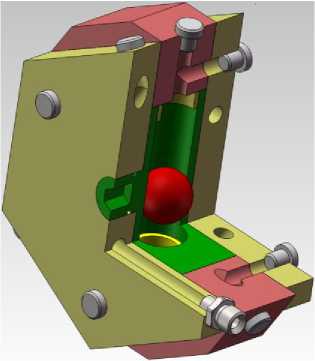
Для решения задачи тонкого формирования импульса расхода в широком диапазоне частот предлагается применить объемный дозатор [9], показанный на рис. 4. Полости ротора 2, расположенные по разные стороны от разделителя 3, при вращении периодически соединяются то с подводящим 5, то с отводящим 6 каналами. Под давлением рабочей жидкости разделитель 3 совершает возвратно-поступательное движение между ограничителями 4 - при каждом движении полость, соединенная с подводящим каналом, заполняется рабочей жидкостью, а из полости, соединенной с отводящим каналом, вытесняется фиксированный объем жидкости. В зависимости от решаемой задачи, вращение ротора может осуществляться как шаговым электродвигателем, так и вручную.
Разделитель полостей 3 выполняет также функцию запорного элемента, а ограничители хода 4 являются седлами запорного элемента, при этом герметичность в крайних положениях разделителя полостей обеспечивается за счет контакта разделителя с ограничителем. Это позволяет снизить требования к точности сопряжения разделителя с отверстием в роторе.
Принцип действия дозатора обеспечивает жесткую связь подачи рабочей жидкости c угловой скоростью, а объема – с углом поворота ротора. Величина импульса расхода определяется рабочим объемом (геометрическими характеристиками) рабочей камеры.
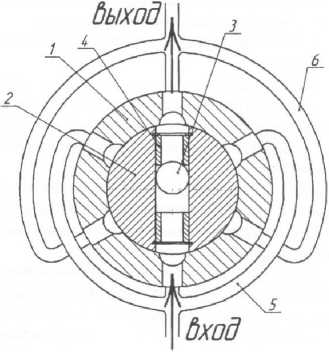
Рис. 4. Объемный дозатор для дискретного регулирования скорости и величины перемещения выходных звеньев гидродвигателей: а – принципиальная схема; б – конструктивное решение
1 - корпус, б
2 - ротор,
3 - разделитель полостей,
4 - ограничитель хода,
5 - подводящий канал,
6 - отводящий канал
На рис. 5 показаны варианты аналогового управления расходом в гидроли- нии (рис. 6, а, б), эквивалентно замещаемые дозатором (рис. 6, в).
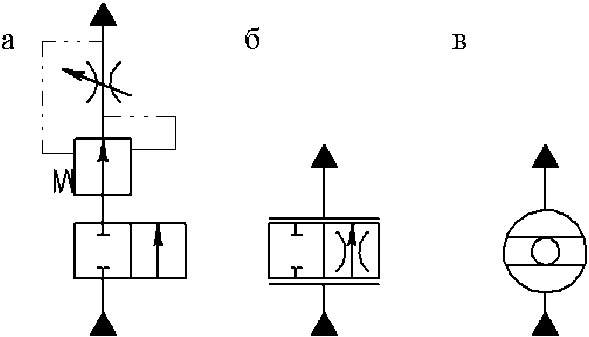
Рис. 5. Схемы управления расходом в гидролинии: а - с регулятором расхода и направляющим распределителем; б - с дросселирующим распределителем; в - с объемным дозатором
Применение дозатора позволит реализовать системы дискретного гидропривода, объединяющие преимущества гидропривода и шагового электропривода [10]. Но для создания таких систем необходимо обосновать геометрические и динамические параметры устройства, разработать схемотехнические решения применения дозаторов, решить задачи алгоритмизации и целочисленной оптимизации. Поэтому работа, направленная на создание систем дискретного гидропривода является актуальной научнопрактической задачей.
http://edulib.pgta.ru/els/_2009/72_09/tehnol_ob orud/glava1/1_3_1_4.htm (дата обращения: 25.04.2017).
generating pulses of small volumes with high frequencies to move the output links to specified distances with high accuracy in a wide range of speeds. This determines the relevance of the scientific and practical task under consideration. Conclusion: the use of dispensers will allow the implementation of discrete hydraulic drive systems, but for its final implementation it is necessary to justify the dynamic and geometric parameters of the device, as well as circuit solutions for the use of such dispensers.
Список литературы Обоснование необходимости создания систем дискретного гидропривода с тонким формированием импульсов расхода
- Свешников В.К., Усов А.А. Станочные гидроприводы. -М.: Машиностроение, 1982, -312 с.
- Сосонкин В.Л. Дискретная гидроавтоматика. М.: Машиностроение. -1972.
- Аксенов В.В., Хорешок А.А., Ефременков А.Б., Казанцев А. А., Бегляков В.Ю., Вальтер А.В. Создание нового инструментария для формирования подземного пространства//Горная техника. -2015. -№ 1(15). С. 24-26.
- Аксенов В.В., Вальтер А.В. Специфика геохода как предмета производства//Научное обозрение. -2014. -Т. 8. -№. 3. -С. 945-949.
- Аксенов В.В., Бегляков В.Ю., Казанцев А.А., Вальтер А.В., Ефременков А.Б. Опыт участия в проекте по организации высокотехнологичного производства//Горное оборудование и электромеханика. -2016. -№ 8(126). -С. 8-15.
- Вальтер А. В., Аксенов В. В., Бегляков В. Ю., Чазов П. А. Определение погрешности расположения секторов стабилизирующей секции геохода на основе данных координатного контроля//Обработка металлов (технология, оборудование, инструменты). -2015. -№. 4. -С. 31-42.
- Аксенов В.В., Ефременков А.Б., Тимофеев В.Ю., Бегляков В.Ю., Блашук М.Ю. Проходческий щитовой агрегат (Геоход)//Пат. на изобретение RUS 2418950; опубл. 20.05.2011, Бюл. № 14.
- Общая методика наладки металлообрабатывающих станков //Education Library: . . URL: http://edulib.pgta.ru/els/_2009/72_09/tehnol_oborud/glava1/1_3_1_4.htm (дата обращения: 25.04.2017).
- Крауиньш П.Я., Бегляков В.Ю., Блащук М.Ю., Смайлов С.А. Объемный дозатор для дискретного регулирования скорости и величины перемещений выходных звеньев гидродвигателей. Патент на изобретение RUS 2328625, 25.12.2006.
- Блащук М.Ю. Обоснование параметров трансмиссии геоходов с гидроприводом//автореф. диссер. канд.техн.наук. -Кемерово, 2012. -Кузбасс. гос. техн. ун-т. -19 с.
- Bruland A. Hard rock tunnel boring. Hard Rock Tunnel Boring, 1998.
- Deng K., Zhang X., Yang J., Wang H. Deformation characteristics under variable stiffness for the propelling mechanism of EPB shield machines in mixed ground. Journal of Mechanical Science and Technology, 2014, 28 (9), pp. 3679-3685 DOI: 10.1007/s12206-014-0829-4
- Festa D., Broere W., Bosch J.W. Tunnelling in soft soil: Tunnel Boring Machine operation and soil response, 2013.
- Kongshu D., Xiaoqiang T., Liping W., Xu C. Research on characteristics of deformation in thrust system for EPB shield machines. Tunnelling and Underground Space Technology, 2011, 26 (1), pp. 15-21 DOI: 10.1016/j.tust.2010.06.008
- Mair R.J., Taylor R.N. Prediction of clay behaviour around tunnels using plasticity solutions. Predictive soil mechanics. Proc. of the Wroth memorial symposium, Oxford, 1992, pp. 449-463.
- Nagel F., Stascheit J., Meschke G. Process-oriented numerical simulation of shield-supported tunnelling in soft soils . Geomechanik und Tunnelbau, 2010, 3 (3), pp. 268-282.
- Rostami J. Study of pressure distribution within the crushed zone in the contact area between rock and disc cutters. International Journal of Rock Mechanics and Mining Sciences, 2013, 57, pp. 172-186 DOI: 10.1016/j.ijrmms.2012.07.031
- Sugimoto M., Sramoon A. Theoretical model of shield behavior during excavation. I: Theory. Journal of Geotechnical and Geoenvironmental Engineering, 2002, 128 (2), pp. 138-155. ) DOI: 10.1061/(ASCE)1090-0241(2002)128:2(138
- Verruijt A. A complex variable solution for a deforming circular tunnel in an elastic half-plane. International Journal for Numerical and Analytical Methods in Geomechanics, 1997, 21(2), pp. 77-89.
