Обоснование параметров динамического стабилизатора устойчивости движения подвижного модуля экспериментального стенда при исследовании активных ротационных рабочих органов почвообрабатывающих машин

Автор: Купряшкин Владимир Федорович, Наумкин Николай Иванович, Князьков Алексей Сергеевич, Купряшкина Валентина Николаевна, Шляпников Михаил Геннадьевич, Купряшкин Владимир Владимирович, Терехин Евгений Юрьевич
Журнал: Инженерные технологии и системы @vestnik-mrsu
Рубрика: Технические науки
Статья в выпуске: 1, 2017 года.
Бесплатный доступ
Введение. Работа посвящена обоснованию конструктивных параметров и технологических режимов функционирования динамического стабилизатора устойчивости движения подвижного модуля экспериментального стенда для исследования активных ротационных рабочих органов почвообрабатьшающих машин. Для этого была рассмотрена конструкция указанного экспериментального стенда и дана характеристика его работы. На основании теоретических и экспериментальных ранее проведенных исследований была отмечена возможность нарушения устойчивости хода подвижного модуля, что в свою очередь отрицательно сказывается на обеспечении выполнения заданной методикой программы эксперимента. Также была указана необходимость конструкторского решения по устранению выявленного недостатка. Кроме этого, рассмотрены конструктивные особенности и характеристики применяемых устройств по обеспечению стабилизации подвижного модуля при исследовании активных ротационных рабочих органов почвообрабатывающих машин. На основе сравнительного анализа был предложен динамический стабилизатор устойчивости движения в виде электромагнитного тормоза с последующим его размещением в конструкции существующего подвижного модуля. Материалы и методы. С целью интеграции электромагнитного тормоза в конструкцию существующего подвижного модуля, на основе синтеза основных положений и законов механики и экспериментальных данных силового взаимодействия активных ротационных рабочих органов с почвой, было проведено теоретическое исследование устойчивости его движения. В результате данного исследования была составлена расчетная схема нагружения подвижного модуля с учетом ее конструктивных особенностей, а также силовых факторов, действующих на ее опорные колеса и исследуемые активные ротационные рабочие органы. С учетом особенностей планирования эксперимента и почвенных условий были выявлены аналитические зависимости основных силовых характеристик определяющих устойчивость движения подвижного модуля. Результаты исследования. Путем обработки результатов исследования была получена база данных, представляющая собой значения силовых характеристик, определяющих устойчивость движения подвижного модуля. Дальнейшее использования значений данной базы с учетом конструктивных особенностей подвижного модуля позволило обосновать наиболее оптимальное месторасположения электромагнитного тормоза в его конструкции. Также на основе стандартной методики было произведено обоснование конструктивных параметров электромагнитного тормоза с выбором его типоразмера. Обсуждение и заключения. Проведенное исследование позволило путем использования электромагнитного тормоза в конструкции подвижного модуля обеспечить стабилизацию его движения, что позволит повысить чистоту экспериментальных исследований и получать наиболее объективные данные в ходе их проведения.
Экспериментальный стенд, подвижный модуль, устойчивость движения, активный ротационный рабочий орган, стабилизатор движения
Короткий адрес: https://sciup.org/14720243
IDR: 14720243 | УДК: 631.11 | DOI: 10.15507/0236-2910.027.201701.052-066
Justification for parameters of a dynamic stabilizer of the experimental stand mobile unit in studying of active rotational working tools of tiller machines
Introduction. The article deals with design options and technological modes of the dynamic stabilizer of the experimental stand mobile unit for studying tillage machine active rotating work tools. Based on theoretical and experimental studies, the possibility the movable module instability was discovered. This negatively affects on implementing the experiment program trough the especific method. The need in engineering solutions for the defect correction is shown. In addition, the authors consider the structural features and characteristics of the used devices for providing the stabilization of the movable module in the study of active rotating work tools of tillage machines. An electromagnetic brake dynamic stabilizer in the structure of the existing rolling module was proposed as an engineering device. Materials and Methods. A theoretical study of rolling module stability, based on synthesis of basic regulations and laws of mechanics related to active rotating work tools was conducted. As a result of the theoretical research, a design scheme of movable module loading was created. This scheme includes the design features and structural power factors. Results. A database representing the settings of power specification in the motion stability determining the mobile unit was created. Further use of the database values allow supporting the most optimal location of the electromagnetic brake with its design options. Discussion and Conclusions. The research of the electromagnetic brake in a mobile unit promoted stabilizing the unit movement, increased the frequency of its use and provided data that are more precise during experiments.
Текст научной статьи Обоснование параметров динамического стабилизатора устойчивости движения подвижного модуля экспериментального стенда при исследовании активных ротационных рабочих органов почвообрабатывающих машин
При проведении экспериментальных исследований активных рабочих органов (АРО) почвообрабатывающих машин широко применяются специализированные экспериментальные стенды – почвенные каналы, позволяющие проводить натурные испытания и имитировать реальные условия функционирования почвообрабатывающих машин и их рабочих органов в лабораторных условиях [1–2].
Для проведения лабораторных исследований при испытании АРО почвообрабатывающих машин в Институте механики и энергетики ФГБОУ ВО «МГУ им. Н. П. Огарёва» используется один из таких специализированных экспериментальных стендов, представляющий собой почвенный канал с подвижным модулем (рис. 1).
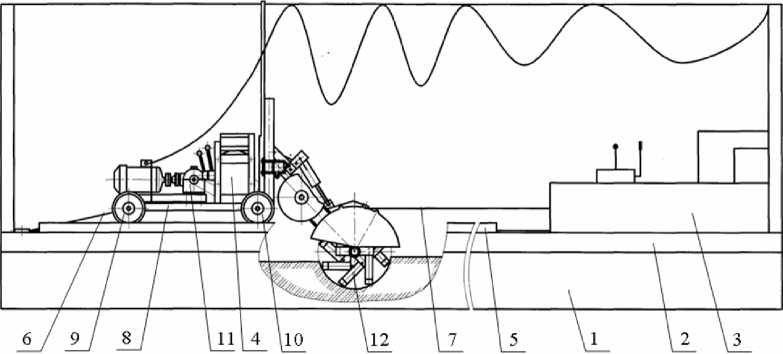
Р и с. 1. Общее устройство экспери ментального стенда F i g. 1. General structure of the experimental stand
Почвенный канал представляет собой яму 1 , выложенную кирпичом и заполненную почвой [3]. В верхней части канала установлена рама 2, изготовленная из профиля. На ней находится тяговая станция 3, предназначенная для обеспечения поступательного движения подвижного модуля 4 . Кроме этого, на раме 2 закрепляются крановые рельсы 5 , которые служат для передвижения подвижного модуля 4 . Возвратно-поступательное перемещение подвижного модуля осуществляется стальными канатами 6 и 7 , которые соединены с одной стороны с рамой модуля в ее передней и задней частях соответственно, а с другой – с барабанами тяговой станции 3 .
Подвижный модуль 4 экспериментального стенда представляет собой отдельную раму 8 с опорными колесами 9 и 10 , а также с размещенными на ней независимым электрическим приводом 11 , обеспечивающим вращение испытуемых АРО 12 конкретной почвообрабатывающей машины.
Практическое использование экспериментального стенда при проведении испытаний АРО почвообрабатывающих машин на некоторых определенных режимах, характеризующихся большими значениями глубины обработки, подачи на нож и твердости почвы [3], выявило нарушение устойчивости движения подвижного модуля –
Vol. 27, no. 1. 2017 отклонение поступательной скорости тележки от первоначально заданного программой эксперимента значения. Кроме этого, проведенные теоретические исследования [4–5] позволили подтвердить практические наблюдения в области устойчивости движения подвижного модуля, заключающиеся в нарушении следующего условия:
F ст ≥ Fxe , (1)
где F ст – суммарная сила сопротивления перекатыванию тележки, Н; Fxe – значение подталкивающей силы взаимодействия АРО с почвой, приведенной к оси вращения опорных колес тележки, Н.
Таким образом, выявленный факт нарушения устойчивости движения подвижного модуля при проведении исследований АРО отрицательно сказывается на обеспечении постоянства переменных факторов, определяемых конкретной программой эксперимента, и, следовательно, на чистоте и объективности получаемых данных, что требует определенного конструкторского решения по его устранению.
Обзор литературы
Как показывают результаты многочисленных исследований АРО почвообрабатывающих машин, основными факторами, приводящими к нарушению устойчивости движения подвижного модуля экспериментального стенда, являются силы, характеризующие их взаимодействие с почвой [4–9].
Задачу обеспечения устойчивости хода движения (постоянства поступательной скорости) экспериментальной тележки, как и в первом случае, исследователи решали традиционным способом – установкой тормозных устройств, позволяющих за счет тормозного момента обеспечить компенсацию подталкивающего усилия фрезерных рабочих органов. В конструкциях экспериментальных стендов многих исследователей нашли применение ленточные тормоза
[6–7]. Данная схема отличается простотой конструкции, но при этом неудобна в эксплуатации. Неудобство заключается в необходимости постоянных регулировок по причине износа элементов. Кроме этого, данные тормозные устройства требуют систематических работ по тарировке тормозного момента.
Другим способом обеспечения стабилизации движения подвижного модуля является применение в его конструкции пассивного стабилизатора [10].
В этом случае конструкция подвижного модуля со стабилизатором устойчивости движения (рис. 2) представляет собой раму 1 , на которой размещены привод 2 с АРО 3 . Рама опирается опорными колесами 4 и стабилизаторами 5 на рельсовый путь 6 . Стабилизатор устойчивости движения состоит из корпуса 7 , на котором крепится при помощи болта 8 и гайки 9 ползун 10 , изготовленный из антифрикционного материала (например, текстолита). Корпус стабилизатора 7 присоединен к оси 11 гайкой 12 .
Пассивный стабилизатор устойчивости движения подвижного модуля испытательного стенда для исследования работы ротационных почвообрабатывающих машин работает следующим образом.
Во время работы экспериментального стенда подвижный модуль, опираясь на опорные колеса 4 и стабилизаторы 5, перемещается с заданной поступательной скоростью по рельсовому пути 6. Одновременно привод 2 обеспечивает вращательное движение АРО 3, которое направленно по ходу движения подвижного модуля. Вследствие обработки почвы АРО 3 возникает подталкивающая сила, которая ведет к увеличению заданной поступательной скорости подвижного модуля. Однако вследствие скольжения между ползуном 10 стабилизатора 5 и рельсом 6 возникает сила трения, которая компенсирует подталкивающую силу. Происходит стабилизация поступательной скорости перемещения подвижного модуля и, таким образом, обеспечивается по- стоянство ее значения, определяемого программой эксперимента в течение всего опыта.
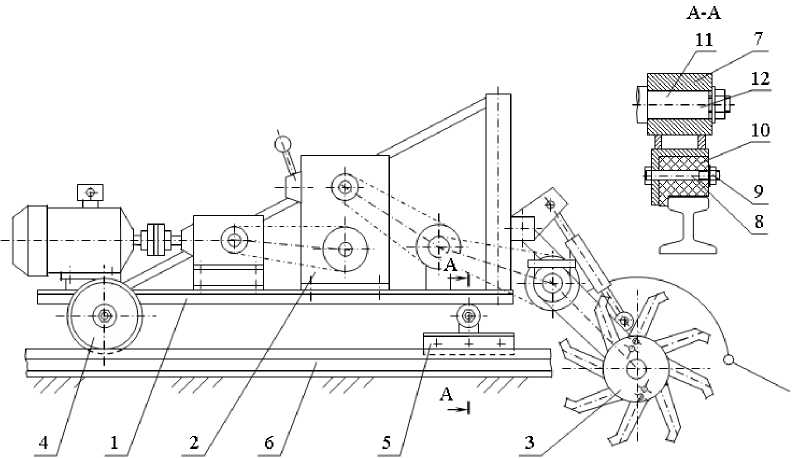
Р и с. 2. Подвижный модуль с пассивным стабилизатором
F i g. 2. A mobile unit with a passive stabilizer
Несмотря на преимущества данной конструкции стабилизатора над рассмотренными ранее, она не лишена недостатков, таких как требование к постоянному уходу, заключающемуся в очистке ползуна и рельсового пути от пыли и грязи. Кроме этого, ползун стабилизатора подвержен износу.
Следующий вариант стабилизатора устойчивости движения подвижного модуля позволяет исключить недостатки предыдущих конструкций за счет использования электромагнитного тормоза [11] (рис. 3). В этом случае подвижный модуль экспериментального стенда представляет собой раму 1, на которой размещен привод 2 с АРО 3. Рама опирается опорными колесами 4 и 5 на рельсовый путь 6. На раме 1 закреплен кронштейн 7, на котором уста- новлена электромагнитная муфта 8, соединенная при помощи соединительной муфты 9 с опорным колесом 5.
Электромагнитный стабилизатор движения подвижного модуля работает следующим образом. Во время работы экспериментального стенда подвижный модуль, опираясь на опорные колеса 4 и 5, перемещается с заданной поступательной скоростью по рельсовому пути 6. Одновременно привод 2 обеспечивает вращательное движение АРО 3. Вследствие их взаимодействия с почвой возникает подталкивающая сила, которая ведет к увеличению заданной поступательной скорости экспериментальной тележки. Однако вследствие работы электромагнитного тормоза 8 создается тормозной момент, который пере- дается через соединительную муфту 9 опорному колесу 5, увеличивает тем самым сопротивление перекатыванию подвижного модуля и компенсирует подталкивающую силу АРО 3. Таким образом, происходит стабилизация движения и поступательной скорости подвижного модуля.
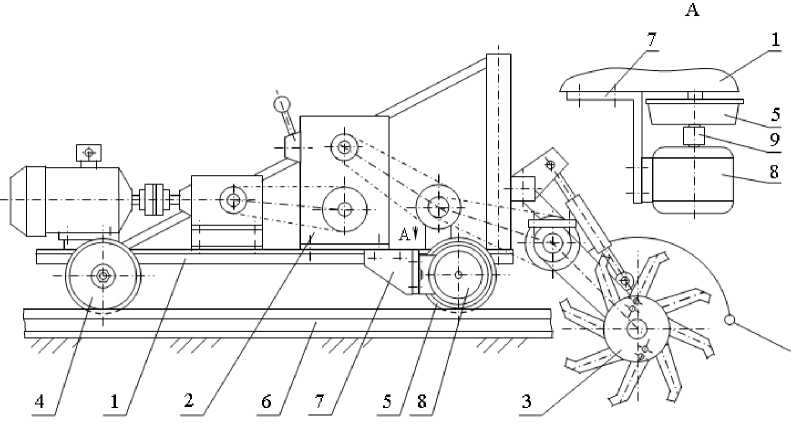
Р и с. 3. Подвижный модуль с электромагнитным стабилизатором
F i g. 3. A mobile unit with an electromagnetic stabilizer
Учитывая конструктивные особенности перечисленных устройств для обеспечения стабилизации движения подвижного модуля экспериментального стенда для исследования АРО почвообрабатывающих машин, наиболее приемлемым мы считаем вариант тележки с электромагнитным стабилизатором. Кроме описанных преимуществ, он позволяет обеспечить дистанционное управление электромагнитным тормозом и возможность регулирования тормозного момента на различных режимах проведения испытаний.
Материалы и методы
Рассмотрим обоснование местоположения предлагаемого электромагнитного тормоза в конструкции подвижного модуля. Учитывая ее особенности (см. рис. 3), электромагнитный тормоз можно расположить на осях его опорных передних или задних колес.
Выбор местоположения электромагнитного тормоза осуществлялся на основании условия (1), составленного с учетом сил, действующих на подвижный модуль и его рабочие элементы, а именно опорные передние 1 и задние 2 колеса, а также АРО 3 , размещенные на раме 4 (рис. 4).
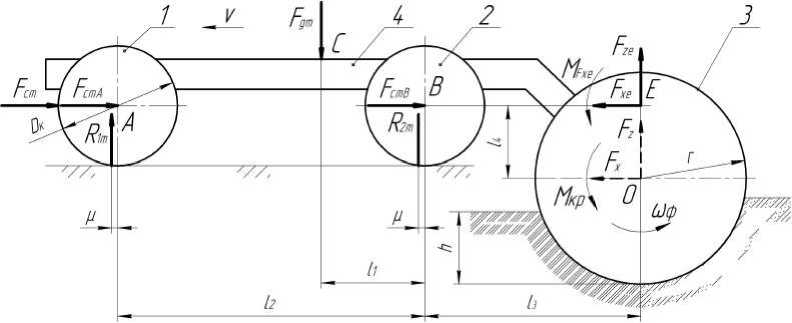
Р и с. 4. Схема нагружения подвижного модуля
F i g. 4. Scheme of the load of a mobile unit
Обоснование местоположения предлагаемого электромагнитного тормоза в конструкции подвижного модуля выполнялось на базе проведенного теоретического исследования устойчивости движения подвижного модуля, методика и результаты которого подробно рассмотрены в работе [5].
Используя условие (1) и данные рис. 4, получим следующие зависимости:
– при расположении тормоза на передней оси:
F xe ≤ F ст В + F fА ; (2)
– при расположении тормоза на задней оси:
F xe ≤ F ст А + F fВ , (3)
где Fxе – подталкивающая сила АРО Fx, приведенная к оси опорных колес подвижного модуля (т. E), Н (согласно рис. 4, Fxe = Fx); FстВ и FстА – силы сопротивлений перекатыванию задних и передних колес подвижного модуля соответственно, Н; FfА и FfВ – силы трения на стыке колеса и рельса, передних и задних колес подвижного модуля соответственно, Н.
Для определения силы Fx воспользуемся зависимостью, установленной в ходе экспериментальных исследований взаимодействия АРО с почвой [3]:
Fx = 4,5 – 7 p – 3 S + 2496 pS , (4)
где p – твердость почвы, МПа; S – подача на нож, м.
Согласно условиям испытаний АРО по методике планирования эксперимента, значения параметров твердости почвы p изменяется в пределах от 0,25 МПа до 1,65 МПа, а значения подачи на нож S – от 0,03 м до 0,11 м [3; 12–13].
Для определения силы сопротивления перекатыванию задних F ст В и передних F ст А колес подвижного модуля воспользуемся уравнениями, учитывающими конструктивные особенности подвижного модуля, режимами его работы, а также силовыми характеристиками взаимодействия испытуемых АРО с почвой [5]:
F CT B
gm T( l 2 - 1 1 ) - (23,2 + 42,2 p - 66 S + 49,2 pS + 42,5 p 2 ) • Г 2 a + fd ) £ ;
• ( 1 2 + 1 3) - (4,5 - 7 p - 3 S ) 1 4 ]t D к J 1 2’
F ctA
gm B l 1 + (23,2 + 42,2 p - 66 S + 49,2 pS + 42,5 p 2) 1 3 +V 2 p + fd ) £ ; (6)
+ (4,5 -7p -3S)14 ]t Dк J12 ’ где g – ускорение свободного падения (g = 9,81 м/с2); mт – масса подвижного модуля (mт = 380 кг); l1 и l2 – расстояние от центра масс (т. С) до оси задних колес (т. В) и база подвижного модуля соответственно (для рассматриваемой конструкции l1 = 300 мм, l2 = 1 100 мм); l3 и l4 – расстояния от центра АРО (т. О) до оси задних опорных колес (т. В) в горизонтальной и вертикальной плоскостях соответственно (с учетом анализа геометрии конструкции подвижного модуля и при условии фрезерования почвы на глубину h = 12 см: l3 = 800 мм, l4 = 360 мм); ϻ – коэффициент трения качения (для чугунного колеса и стального рельса ϻ = 0,5 мм [14]); f – коэффициент трения в подшипниках осей колес (для подшипников качения f = 0,01 [Там же]); d – диаметр оси колес под подшипник (d = 35 мм); Dк – диаметр колес (Dк = 200 мм); β – коэффициент, учитывающий сопротивление от трения реборд (β = 0,5 мм [Там же]).
Значения сил трения на стыке колеса и рельса FfА и FfВ определим по формулам:
F fА = f с R 1т ; (7)
F fВ = f с R 2т , (8)
где f с – коэффициент трения скольжения (при трении несмазанных чугунного колеса и стального рельса f с = 0,15 [Там же]); R т1 и R т2 – силы давления на передних и задних колесах тележки соответственно, Н.
Для определения сил R т1 и R т2восполь-зуемся следующими выражениями [5]:
R 1 T
gm l, + F L + M„ 103 t 1ze 3Fxe l2
;
R
2t
g m T ( l 2 — l i ) — Fze ( l 2 + l 3 ) — MFxe 103 , (10)
l 2
где Fze – значение выталкивающей силы АРО Fz , приведенной к оси вращения опорных колес подвижного модуля (т. Е ) (согласно рис. 4, Fze = Fz ); МFxе – момент пары сил при приведении подталкивающей силы АРО Fx к оси вращения опорных колес подвижного модуля (т. Е ), Н.
Для определения силы Fz воспользуемся зависимостью, установленной в ходе экспериментальных исследований взаимодействия АРО с почвой [3], а для определения момента МFxе – уравнением, полученным при теоретическом исследовании [5]:
F = 23,2 + 42,2p – 66S + z+ 49,21pS + 42,5p2; (11)
M Fxe = (4,5 - 7 Р - 3 S ) 1 4 10 - 3 .
Подставляя последовательно (11) и (12) в (9) и (10), а затем в (5) и (6) с учетом ряда преобразований получим следующие уравнения:
F fA = f c
gm T 1 1 + ( 23,2 + 42,2 p - 66 S + 49,21 pS + 42,5 p 2 ) 1 3
l 2
( 4,5 - 7 p - 3 S ) 1 4
+ 1 2
;
Fb = f c
gm T ( l 2 - l1 ) - ( 23,2 + 42,2 p - 66 S + 49,2 pS + 42,5 p 2 ) ( 1 2 + 1 3 ) l 2
( 4,5 - 7 p - 3 S ) 1 4 — l 2
Результаты исследования
Для анализа динамики сил трения FfА и FfВ соответственно подставим в зависимости (13) и (14) принятые и известные значения параметров, а также минимальное и максимальное значения подачи на нож S (Smin = 0,03 м; Smax = 0,11 м) и значения твердости почвы p в диапазоне от 0,25 МПа до 1,65 МПа. Результаты расчетов сведем в таблицу.
Т а б л и ц а
T a b l e
Значения сил, действующих на передние FАj и задние FBj колеса подвижного модуля при различных вариантах установки электромагнитного тормоза
Values of the forces effecting on the front FАj and rear FBj wheel of the mobile unit under different options of mounting electromagnetic brake
|
Значения сил, Н / Values of forces, H |
Подача на нож S , м / Supply on coulter, S, m |
Твердость почвы p , МПа / Soil hardness, p , MPa |
||||
|
0,25 |
0,60 |
0,95 |
1,30 |
1,65 |
||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
F xe |
0,03 |
21,4 |
45,1 |
68,9 |
92,7 |
116,4 |
|
0,11 |
71,1 |
164,7 |
258,4 |
352,0 |
445,6 |
|
|
R 1т |
0,03 |
1047,5 |
1027,2 |
999,5 |
964,6 |
922,7 |
|
0,11 |
1050,4 |
1029,1 |
1000,5 |
964,6 |
921,4 |
|
Окончание таблицы / End of table
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
R 2т |
0,03 |
2651,0 |
2604,3 |
2539,9 |
2457,7 |
2357,9 |
|
0,11 |
2658,4 |
2609,3 |
2542,5 |
2458,1 |
2355,9 |
|
|
F ст В |
0,03 |
87,7 |
86,0 |
83,9 |
81,2 |
77,8 |
|
0,11 |
87,8 |
86,3 |
83,9 |
81,2 |
77,8 |
|
|
F fА |
0,03 |
149,5 |
146,4 |
142,3 |
137,0 |
130,7 |
|
0,11 |
149,9 |
146,7 |
142,4 |
137,0 |
130,6 |
|
|
F ст В + FfА |
0,03 |
237,0 |
232,4 |
226,2 |
218,2 |
208,5 |
|
0,11 |
237,7 |
233,1 |
226,4 |
218,2 |
208,3 |
|
|
Выполнение условия (знак «+» – условие выполняется; знак «–» – условие не выполняется) / Condition («+» – condition is met; «–» – condition is not met) F xе ≤ F ст В + F fА |
0,03 |
+ |
+ |
+ |
+ |
+ |
|
0,11 |
+ |
+ |
— |
— |
— |
|
|
F ст А |
0,03 |
34,4 |
35,1 |
35,9 |
37,1 |
38,4 |
|
0,11 |
34,3 |
35,0 |
35,9 |
37,1 |
38,4 |
|
|
F fВ |
0,03 |
477,8 |
470,7 |
460,8 |
448,3 |
433,0 |
|
0,11 |
478,9 |
471,5 |
461,2 |
448,3 |
432,7 |
|
|
F ст А + FfВ |
0,03 |
512,3 |
505,8 |
496,8 |
485,3 |
471,4 |
|
0,11 |
513,3 |
506,5 |
497,2 |
485,4 |
471,2 |
|
|
Выполнение условия (знак «+» – условие выполняется; знак «–» – условие не выполняется) / Condition («+» – condition is met; «–» – condition is not met) F xе ≤ F ст А + F fВ |
0,03 |
+ |
+ |
+ |
+ |
+ |
|
0,11 |
+ |
+ |
+ |
+ |
+ |
Из анализа таблицы следует, что размещение электромагнитного тормоза на оси передних колес не позволяет обеспечить выполнение требуемого условия на всех режимах работы подвижного модуля, а именно при Smax = 0,11 м и p > 0,95 МПа. Размещение электромагнитного тормоза на задней оси опорных колес, напротив, позволяет добиться выполнения условия на всех режимах функционирования подвижного модуля и, следовательно, обеспечить стабильность его движения по рельсовому пути экспериментального стенда.
Произведем выбор типоразмера электромагнитного тормоза по следующему условию:
T ТР ≤ Т Т , (15)
где T ТР и Т Т – расчетное и табличное значения тормозного момента соответственно, Н∙м.
Значение момента T ТР определим по формуле [Там же]:
T ТР = К Т T pmin, (16)
где k т – коэффициент запаса тормозного момента ( k т = 1,5); T pmin – расчетный минимальный тормозной момент, Н∙м.
Момент T определяем с учетом pmin особенностей работы и нагружения подвижного модуля (см. рис. 3) по следующей формуле:
T pmn = F расч 7 ^ 2 K 10 - 3 , (17)
где FfВ расч – расчетная сила трения скольжения на тормозных колесах, Н; D к – диаметр колеса ( D к = 200 мм).
Расчетное значение силы FfВ расч определим с учетом особенностей силового нагружения экспериментальной тележки и зависимости (3) по следующей формуле:
fВ расч xei cт Аi ,
где Fxi и F ст Аi – значения подталкивающей силы на АРО и сила сопротивления перекатыванию на передних колесах подвижного модуля, соответствующие наиболее тяжелому режиму его работы, Н.
Исходя из анализа данных таблицы, наиболее тяжелый режим работы соответствует максимальным значениям твердости почвы ( p = 1,65 МПа) и подачи на нож ( S = 0,11 м), для которых Fxei = 445,6 Н и F ст Аi = 38,4 Н.
После последовательной подстановки известных и рассчитанных значений в (18), (17) и (16) получим:
FfВ расч = 445,6 – 38,4 = 407,2 H;
T pmn = 407,2 20010
3 = 40 H ■ m ;
T TP = 1,5∙40 = 60 H ∙ м
Далее по каталогу [15] с учетом условия (15) выбираем тормоз: ПТ-6М1 с тормозным моментом T T = 60 H ∙ м и рабочим диапазоном частот вращения от 1 до 4 000 мин –1.
Кинематическая схема подвижного модуля с размещенным на оси задних колес электромагнитным тормозом представлена на рис. 3.
Обсуждение и заключения
Проведенное исследование позволило найти конструкторское решение по обеспечению стабилизации устойчивости движения подвижного модуля экспериментального стенда при проведении испытаний АРО почвообрабатывающих машин. Кроме этого, было проведено обоснование выбора типоразмера и местоположения электромагнитного тормоза с учетом конструктивно-технологических параметров и режимов работы, а также особенностей проведения эксперимента. Достигнутые результаты в перспек- тиве способствуют повышению чисто- и позволят получать наиболее объекты экспериментальных исследований тивные данные в ходе их проведения.
Все авторы прочитали и одобрили окончательный вариант рукописи.
In: Energoeffektivnyye i resursosberegayushchiye tekhnologii i sistemy: mezhvuz. sb. nauch. tr. [Energyefficient and resource-saving technologies and systems: Proceedings.] Saransk: Mordovia State University Publ.; 2010; 372-378 (In Russ.)
Submitted 23.01.2017; revised 15.02.2017; published online 31.03.2017
All authors have read and approved the final manuscript.
Список литературы Обоснование параметров динамического стабилизатора устойчивости движения подвижного модуля экспериментального стенда при исследовании активных ротационных рабочих органов почвообрабатывающих машин
- Купряшкин В. Ф. Устойчивость движения и эффективное использование самоходных почвообрабатывающих фрез: теория и эксперимент: монография. Саранск: Изд-во Мордов. ун-та, 2014. 140 с. URL: http://elibrary.ru/item.asp?id=23511099
- Чаткин М Н. Кинематика и динамика ротационных почвообрабатьшающдх машин. Саранск: Изд-во Мордов. ун-та, 2008. 316 с.
- Купряшкин В. Ф. Повышение эффективности функционирования самоходной малогабаритной почвообрабатывающей фрезы оптимизацией конструктивно-технологических параметров (на примере фрезы ФС-0,85): дис.. канд. техн. наук. Саранск, 2011. 220 с. URL: http://elibrary.ru/item.asp?id=19247797
- Анализ устойчивости хода экспериментальной тележки испытательного стенда для исследования почвообрабатывающих машин с фрезерными рабочими органами/В. Ф. Купряшкин //Энергоэффективные и ресурсосберегающие технологии и системы: межвуз. сб. науч. тр. Саранск: Изд-во Мордов. ун-та, 2010. С. 372-378.
- Купряшкин В. Ф., Наумкин Н. И., Купряшкин В. В. Исследование устойчивости движения подвижного модуля экспериментальной установки при испытании активных ротационных рабочих органов почвообрабатышающих машин//Вестник Мордовского университета. 2016. № 4. С. 246-258. URL: http://vestnik.mrsu.ru/content/pdf/16-2/09.pdf
- Андреев В. И. Исследования динамических процессов ротационных почвообрабатышающих машин: автореф. дис.. канд. техн. наук. М., 1972. 28 с.
- Борисов В. Н. Исследование динамических характеристик и режимов работы почвообрабатывающих фрез: автореф. дис.. канд. техн. наук. Киев, 1969. 26 с. URL: http://elibrary.ru/item.asp?id=16150164
- Динамические условия обеспечения равномерного движения самоходных малогабаритных почвообрабатышающих фрез с ходовыми колесами/В. Ф. Купряшкин //Нива Поволжья. 2011. № 4. С. 52-56. URL: http://elibrary.ru/item.asp?id=17261700
- Синеоков Г. Н., Панов И. М. Теория и расчет почвообрабатышающих машин. М.: Машиностроение, 1977. 328 с.
- Пат. 114262 РФ, МПК7 А01В 33/00. Экспериментальная тележка для испытательного стенда/В. Ф. Купряшкин ; заявитель и патентообладатель ГОУВПО «МГУ им. Н. П. Огарёва». № 2011121198/13; заявл. 25.05.2011; опубл. 20.03.2012, бюл. № 8. 5 с.,
- Пат. 109955 РФ, МПК7 А01В 33/00. Экспериментальная тележка для испытательного стенда/В. Ф. Купряшкин ; заявитель и патентообладатель ГОУВПО «МГУ им. Н. П. Огарёва». № 2011115751/13; заявл. 20.04.2011; опубл. 10.11.2011, бюл. № 31. 5 с.,
- Методика проведения стендовых испытаний самоходных почвообрабатывающих машин с активными рабочими органами/В. Ф. Купряшкин //Повышение эффективности функционирования механических и энергетических систем: мат-лы Всерос. науч.-техн. конф. Саранск: Изд-во Мордов. ун-та, 2009. С. 385-389.
- Купряшкин В. Ф. Обоснование факторного пространства исследования активных рабочих органов самоходных почвообрабатышающих фрез (на примере фрезы ФС-0,85)//Повышение эффективности функционирования механических и энергетических систем: мат-лы Всерос. науч.-техн. конф. Саранск: Изд-во Мордов. ун-та. 2009. С. 391-394.
- Александров М. П. Грузоподъемные машины. М.: Изд-во МГТУ им. Н. Э. Баумана; Высш. шк., 2000. 552 с.
- Электромагнитные порошковые нагрузочные тормоза серии ПТ . URL: http://www. stancons.ru/pt.shtml
