Обоснование параметров резервных орбит при выведении космического аппарата в случае возникновения нештатных условий

Автор: Аверкиев Николай Федорович, Власов Сергей Александрович, Кульвиц Алексей Владимирович, Салов Вячеслав Викторович
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Информатика, вычислительная техника и управление
Статья в выпуске: 1 т.21, 2019 года.
Бесплатный доступ
При запуске космических аппаратов (КА) возникают нештатные ситуации, обусловленные целым рядом факторов. В результате, часть пусков, которые признаны частично успешными, приводят к тому, что КА выводятся и функционируют на «нерабочих» орбитах. Эта ситуация приводят к уменьшению показателя качества выполнения целевой задачи одиночным КА или системой КА. В статье рассматривается концепция обоснования параметров, так называемых резервных орбит, на которые могут быть выведены КА при возникновении нештатной ситуации. Функционирование на данных орбитах позволяет обеспечить требуемый уровень результативности выполнения целевой задачи. Предложена методика решения задачи обоснования параметров резервных орбит систем КА периодического обзора заданной поверхности Земли путем выбора квазисинхронных орбит с меньшим периодом обращения. В основе методики лежит конечный перебор множества квазисинхронных орбит, которые максимально приближены к параметрам штатных целевых орбит. Приоритет отдается квазисинхронным орбитам с периодом обращения меньшим, чем период обращения на штатной орбите, и обеспечивающим требуемую ширину полосы обзора. Результаты моделирования позволили сформулировать ряд важных выводов. Запускаемые в нештатных ситуациях на резервные орбиты КА, существенно влияют на характеристики просмотра земной поверхности системой КА. В этом случае сохраняются средние значения величины разрыва в наблюдении всей поверхности Земли, но обзор поверхности Земли будет не столь равномерным как на штатных орбитах. Эта особенность приводит к тому, что величина максимального разрыва в наблюдении при использовании резервных орбит будет равна максимальному разрыву в наблюдении при отсутствии одного КА на штатной орбите, но будет происходить значительно реже.
Средства выведения, нештатная ситуация, космический аппарат, квазисинхронные орбиты, минимальный разрыв в наблюдении, резервные орбиты
Короткий адрес: https://sciup.org/148314134
IDR: 148314134 | УДК: 78.25.15.29
Substantiation of the parameters of backup orbits during injection of the spacecraft in case of emergency conditions
When launching spacecraft (SC), abnormal situations arise due to a number of factors. As a result, part of the launches, which are recognized as partially successful, lead to the fact that the spacecraft are withdrawn and operate in “non-working” orbits. This situation leads to a decrease in the quality of the target task by a single spacecraft or spacecraft system. The article deals with the concept of substantiation of parameters, the so-called reserve orbits, which can be derived SC in the event of an emergency situation. Functioning in these orbits allows to provide the required level of performance of the target task. A method for solving the problem of substantiation of the parameters of reserve orbits of spacecraft systems for periodic review of a given surface of the Earth by selecting quasi-synchronous orbits with a shorter orbital period is proposed. The technique is based on a finite search of the entire set of quasi-synchronous orbits, which are as close as possible to the parameters of the regular target orbits. Priority is given to quasi-synchronous orbits with a period of rotation less than the period of rotation in the regular orbit, and providing the required bandwidth. The simulation results allowed us to formulate a number of important conclusions. Launched in emergency situations, the spacecraft reserve orbits significantly affect the characteristics of the earth’s surface viewing by the spacecraft system. In this case, the average values of the gap in the observation of the entire surface of the Earth remain, but the review of the Earth’s surface will not be as uniform as in regular orbits. This feature leads to the fact that the value of the maximum gap in the observation using reserve orbits will be equal to the maximum gap in the observation in the absence of one SPACECRAFT in the normal orbit, but in a short time interval.
Текст научной статьи Обоснование параметров резервных орбит при выведении космического аппарата в случае возникновения нештатных условий
Обстоятельства, возникающие при запусках космических аппаратов и непредусмотренные штатными условиями выведения, ведут к появлению нештатных условий подготовки и пуска, а также полёта средств выведения (СВ) на активном участке траектории. Следствиями нештатных условий полёта СВ являются аварии, ча-
стично успешные пуски, а также выведение КА на штатные орбиты с замечаниями в технических отчётах по результатам пусков. Нештатные условия подготовки и пуска СВ могут приводить к переносу запусков КА, авариям на старте и к нештатным условиям полёта СВ [1]. В результате частично успешных пусков СВ космические аппараты оказываются на нерасчётных орбитах, где они решают целевые задачи с заниженными показателями качества или считаются «утерянными» из-за невозможности решения этих задач. Выведение КА на такие орбиты происходит из-за того, что, закладываемая в настоящее время в системы управления движением (СУД) СВ, концепция предполагает выведение КА на орбиты, параметры которых максимально приближены к параметрам штатных целевых орбит. Реализованный подход является обоснованным, если целевые орбиты при сложившихся нештатных условиях полёта находятся в областях достижимости СВ. В противном случае – пуски СВ оказываются частично успешными, хотя в областях достижимости имелось значительное количество орбит КА, среди которых могли быть приемлемые, с точки зрения результативности решения целевых задач (связи, метеорологического обеспечения, навигации и т. д.). Эта ситуация является отправной точкой для разработки новой концепции, требующей внесения изменений в перечень задач управления движением, решаемых до пуска СВ и в процессе полёта на борту, а также обоснования параметров орбит КА, названных резервными [1].
Из всего многообразия возможных орбит КА в результате практического решения задач освоения космического пространства можно выделить (классифицировать) лишь немногие (целевые, опорные, промежуточные и т. д.). Среди них понятия «резервные» до некоторого времени не существовало [1, 2].
Резервными орбитами будем называть целевые орбиты конкретного КА или однотипных КА, лежащие в областях достижимости СВ, на которые может выводиться КА в случаях возникновения нештатных условий полёта СВ и обеспечивающие при этом наибольшую результативность решения целевых задач.
Решение задачи перенацеливания СВ на резервную орбиту представляет определенные трудности с математической и вычислительной точек зрения. Ограниченные ресурсы бортовой цифровой вычислительной машины (БЦВМ) и необходимость решения одновременно целого комплекса задач, выдвигают жесткие требования к методам и алгоритмам синтеза траектории выведения КА. Анализ результатов, полученных другими авторами [3-5], позволяет сделать вывод, что ограниченные возможности БЦВМ, сложность алгоритмов и проблемы сходимости решения предполагают применение метода декомпозиции задачи наведения СВ на новую орбиту на две части – наземную (решаемую до старта СВ) и бортовую (решаемую в реальном масштабе времени).
При решении наземной части задачи синтеза обосновываются параметры резервных орбит КА, выявляется перечень нештатных ситуаций, время их возникновения, оцениваются возможности СУД по осуществлению управляемого полёта, строится область достижимости и формируется структура программы управления движением.
После решения наземной части задачи синтеза в запоминающее устройство бортового комплекса управления движением СВ на основе проведённых до старта исследований закладывается перечень нештатных ситуаций и значения параметров, позволяющие их идентифицировать и синтезировать новую траекторию движения, программы движения, энергетическая характеристика СВ, построенная в зависимости от времени возникновения соответствующей нештатной ситуации, а также параметры резервных орбит. При этом поиск параметров программы полёта сводится к последовательности решения краевых задач.
Зная энергетические возможности СВ по доставке КА на орбиту максимальной высоты из сложившейся нештатной ситуации, можно выбрать резервную орбиту, обоснованную и заложенную до старта в БЦВМ СУД.
Большинство задач, решаемых с помощью КА, может быть сведено к сбору или передаче информации с поверхности Земли. В этом случае говорят о системах КА обзора поверхности Земли [1,6-11]. Рассмотрим вопрос обоснования параметров резервных орбит для систем сбора и передачи информации с поверхности Земли на круговых орбитах, как систем обеспечивающих обзор поверхности Земли с разрывом в наблюдении – систем КА периодического обзора поверхности Земли.
ПОСТАНОВКА ЗАДАЧИ
Среди множества достижимых орбит, на которые может быть выведен КА системы периодического обзора поверхности Земли, выбрать такие, на которые может выводиться КА в случаях возникновения нештатных условиях полёта СВ, и обеспечивающие при этом наибольшую результативность решения целевых задач. Рассмотрим только круговые орбиты.
Исходными данными для расчёта параметров резервных орбит являются:
-
а) параметры штатной орбиты, на которую должен быть выведен КА ( i – наклонение орбиты, H – высота орбиты, Т Ω – драконический период обращения );
-
б) характеристики землеобзора ( ф з - геоцентрический угол обзора поверхности Земли или
- АХ э – ширина полосы обзора на экваторе).
МЕТОДИКА ОБОСНОВАНИЯ ПАРАМЕТРОВ РЕЗЕРВНЫХ ОРБИТ
Под обзором поверхности Земли понимают наблюдение поверхности Земли с помощью аппаратуры (фото, радио, инфракрасной. телевизионной и др.), установленной на борту КА. Обычно предполагают, что бортовая аппаратура обеспечивает обзор части пространства, ограниченной поверхностью кругового конуса с углом полураствора равным углу обзора бор-
товой аппаратуры у. В этом случае на поверхности шарообразной Земли получаем круговую зону обзора, размеры которой характеризуются геоцентрическим углом ф3 [1], который зависит от радиуса орбиты КА (r ) и угла обзора борто-
I r вой аппаратуры ф 3 = arcsin l — siny
-Y , где R -
радиус шарообразной Земли. При этом ширина полосы на экваторе равна
AX = 2arcsin f s'll( P - ) ,
3 I sin e J
где β – угол наклона вектора относительной скорости к плоскости экватора.
Для расчета периодического обзора поверхности Земли используют характеристики трассы полета, в частности, межвитковое расстояние, суточный сдвиг трассы полета КА и др [1, 12].
С учетом влияния нецентральности гравитационного поля Земли абсолютная величина меж-виткового расстояния определяется по формуле
Рассмотрим вопрос об определении максимального разрыва в наблюдении одним КА всей поверхности Земли. Остановимся на случае, когда трасса полета КА пересекает экватор под прямым углом ( β = π /2). Это происходит при наклонении i , ∗ ,
Х пер T q
i* = arccos = arccos — .
∗ эф
При этом наклонении ширина полосы обзора на экваторе с учетом формулы (1) равна
T
AXmb = 2 n— , MB
■‘ эф
AX = 2Фз
,
где Т эф – эффективные сутки, время полного оборота Земли относительно восходящего узла
Для определения максимального разрыва в наблюдении одним КА всей поверхности Земли введем величину Δλ
2п орбиты, T = ; ω – угловая скорость эф ю3-Q 3
вращения Земли, ω З=7.29·10–5с–1; Ω – угловая
–
AX = ^
m
Δλ 2
1 - m
скорость прецессии восходящего узла орбиты, обусловленная влиянием нецентральности гравитационного поля Земли.
Для определения суточного сдвига трассы вводят величину m = { Т эф / T — }, где {•} - дробная часть числа, тогда абсолютная величина суточного сдвига трассы полета КА определится по формуле
I 2
, если l - нечетно, MB
AXMB, если l - четно.
Пусть ширина полосы обзора на экваторе меньше величины АХ, т.е AX э < AX .
Введем величины q j =
j AX MB
Δλ
и k j =
j AX mb
Δλ
Пусть l =[^^
AX MB
AX = (1 - m ) AX mb .
целое число оборотов в T
] = h^] , где [•] — целая часть T Ω
сутках
числа,
тогда имеем равенство
2 n = ( l + m ) AX MB , ИЛИ П = l + m AX mb -
Обозначим k – номер последнего нисходящего узла перед первым восходящим. С учетом формулы (4) после выделения целой части получим
π k = [-
-
AX MB
Г i
____2
AX mb
] + 1 = ^
, если l - четное,
l + 1
I 2
, если l - нечетное.
Используя величину kj , можно определить расстояние А Х j между последним ( q j + 1) прохождением экватора на интервале j межвитковых расстояний и j +1 узлом и расстояние ∆ λ′ j между следующим ( q j + 2) прохождением и j +1 узлом, а именно:
AX j = k j AX = j AX mb - q j AX , j j j (10)
AX j = (1 - k j ) AX = ( q j + 1) AX- j AX mb -
Определим, вначале, максимальный разрыв в наблюдении одним КА всей поверхности Земли в количестве полусуток П. Рассмотрим частные случаи.
Пусть через q j 1 полусуток выполняются условия AX. < AX3 , AX’ > AX, (рис. 1).
j 1 э j 2 э
Абсолютные величины минимальных угловых расстояний образующихся между восходящими и нисходящими узлами в течение половины суток в восточном ∆ λ вост и в западном ∆ λ зап направлениях рассчитываются по формулам.
На интервале межвиткового расстояния об-
AX BOCT
Δλ
зап
= <
1 + m Δλ
m
[ у A
1 - m
..„, если l - четно, MB
.MB , если l - нечетно.
AX MB ,
если l - четно,
разуется q j 1 «окон», которые, начиная с q j 1 + 1
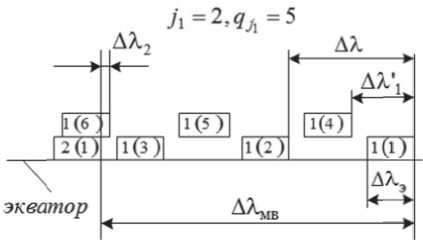
Рис. 1. Расположение полос обзора на экваторе при AX j < AX э
2- m
I 2
AX MB ,
если l - нечетно.
полусуток, покрываются по одному в каждые полусутки на величину АХ j . Все межвитковое расстояние будет покрыто полосами обзора, когда выполнится условие АХ j < АХ э , т.е. через q j 2 + 1 сутки. Итак, величина П может быть определена следующим образом: П = q j 1 + q j 2 +1.
Пусть теперь через q j 2 + 1 полусуток выполняются условия АХ j 2 < АХ э , АХ j 2 > АХ э(рис. 2).
числа оборотов КА в сутках Т эф/ T q не фиксированными, запишем уравнения нижних границ области величины П в функции Т эф j T q .
Например, для величины АХ j 1 в случае нечетного значения l — [ Т эф / T q ] имеем
АХ j 1 =
j i АХ мв - q j 1 АХ АХ мв '
j 1 - q j i
' Г Т
2 I Т q
)
- 1
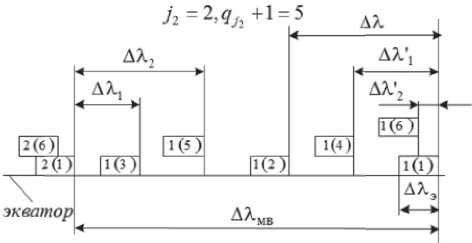
Рис. 2. Расположение полос обзора на экваторе при АХ ' j 2 < АХ э
Аналогичные формулы получим и для случая, когда число l – четн о е [2]. В результате для расчета величин АХ j , , АХ' j 2 получим
АХ = | j , - q j , ( Т эф / Т q - 1 )/2, если 1 - нечетно, j 1 [ j , - q j , ( 1 + 1 - Т эф/ Т q ) /2 , если 1 - четно,
АХ‘ — J ( q j 2 + 1)( Т эф/ Т Q l V2 - j 2 ,если 1 - нечетно, j 2 [( q j 2 + 1)( 1 + 1 - Т эф/ Т q )/2 - j 2 , если 1 - четно.
Область значений разрыва в наблюдении П ограничивается снизу максимальными значениями величин АХ j , , АХ' j 2 , а именно:
АХэ > тах{ АХ j , AX’ j 2 }.
На пересечении границ имеем равенство
В течение этих q j + 1 полусуток образовались q j 2 + 1 «окно». В дальнейшем каждое «окно» покрывается по одному в полусутки на величину AX j . Полное покрытие всех «окон» произойдет через q j 1 полусуток, когда выполнится условие АХ j 1 < АХэ. Общее число полусуток опять будет равно П = q j 1 + q j 2 + 1 .
Таким образом, перебирая числа j 'b j 2:
АХ j = АХ' j 2 . (15)
j 1 = 1,2,..., j 2 = 1,2,..., находим наименьшие, для которых соответственно выполняются условия АХ j 1 < АХ э , Х' j 2 < АХ э и определяем по ним величину наибольшего разрыва в наблюдении в полусутках по формуле
Из этого равенства следует, что сдвиги слева и справа одинаковы и, следовательно, трасса полета через определенное время замкнется, т.е на пересечении границ будет находиться квази-синхронная орбита.
Для нахождения взаимно простых целых чисел p , q , решим уравнение (15) относительно Т эф / T q с учетом формул (13) и для возможных сочетаний четности и нечетности числа оборотов в эффективные сутки l и числа разрыва, в наблюдении выраженного в полусутках П.
В результате получим.
Для нечетного l:
П = qj 1 + qj 2 + 1 . (11)
Перейдем к безразмерным величинам
Δλ Δλ Δλ′ j
АХЭ — -, ах,- = —j , АХ,- = -т—. Следовательно,
АХ МВ j АХ МВ j АХ МВ ,
p — I q
j 1 + j 2 + 1 П/2
П/2
2 ( j 1 + j 2 )+ П l
Для четного l:
Δ λ j
Δλ
— k / - , j АХ мв
AX j — (1 - k j )
Δλ
АХ Мв
Определим область на плоскости числа оборотов КА в сутках ( Т эф / T q ) и безразмерной Δλ величины ширины полосы обзора АХ э — э , АХ МВ
в которой значений числа оборотов П не изменяется. Используя формулы (9, 10, 12) и считая
если П - четно, если П - нечетно.
' ( l + 1 ) П/2 - j1 - jj
P — I П/2
q | ( l + 1 ) П - 2 j - 2 j 2
, если П - четно, если П - нечетно.
Среди чисел jx, j 2 : jx = 1,2,..., j 2 = 1,2,..., находим наименьшие, для которых соответственно выполняются условий АХ j < АХэ , АХ' j 2 < АХ э , поэтому в формулах (16,17) числа p , q получаются взаимно простыми целыми числами.
Решив уравнения
AX j i = 0,
AX' = 0, j 2
с учетом формул (13), найдем граничные значения числа оборотов в сутки Т эф [Т^ для рассматриваемой области разрыва в наблюдении П.
В зависимости от четности целого числа оборотов за эффективные сутки получим следующую группу формул
Для нечетного l :
7 1 + l q j j2-
„ /7 ,если qji- четно, pi = I qji /2
q 1 ——qj3- , если q - - нечетно.
I qji p 2 =. q 2
j 2 + l ( q j + D/2
-
2 , если q
(qj, + W2
2 j 2 + l (qj + D ----------2----, если q q, +1 32
j 2
- нечетно,
- четно.
Для четного l :
-—q--j ,если q; - четно, pi = J qjJ2*
q1 (--- ^---j .если q - нечетно.
[ qj
P 2 = . q 2
( l + 1)( q j 2 + 1)/2 - j 2
(qj 2 +1)/2
( l + 1)( qj 2 + 1) - 2 j i qj 2 + 1
, если q j 2
, если q j 2
- нечетно, - четно.
В приведенных формулах в числителях приведены выражения для величины p , в знаменателях – для q с учетом их взаимной простоты. На рис. 3 приведена область разрыва в наблюдении.
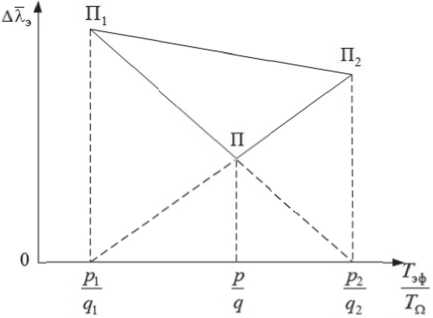
Рис. 3. Область разрыва в наблюдении
Между областями разрывов в наблюдении, используя формулы (16-20) можно установить следующие связи: П = П + Щ и т.д. [2].
Обозначим через ∆t1 – разрыв в наблюдении всей поверхности Земли, выраженный в коли- честве периодов обращения КА TΩ. Величина его в каждой области по числу периодов будет одинакова, так как одинаково значение П. Рассмотрим случай, когда орбиты являются квази-синхронными.
В зависимости от четности чисел p и q нисходящие узлы по-разному располагаются относительно восходящих узлов.
Определим минимальное угловое расстояние между восходящими узлами за q суток AX min . Так как за это время КА совершает ровно p оборотов, то на экваторе равномерно размещается p восходящих узлов и поэтому AX' min = 2 л/ p . Угловое расстояние между восходящими и нисходящими узлами на первом витке равно л + АХ мв/ 2 . Следовательно, на этом интервале укладывается ( д + АХ мв/ 2 ) / АХ'тш = ( q + p )/2 угловых расстояний AX' min • Откуда получаем, что при нечетных значениях чисел p , q – восходящие узлы совпадают с нисходящими узлами. Минимальное расстояние (не равное нулю) между узлами AX min = AX m^ = 2 п/ p (рис. 4).
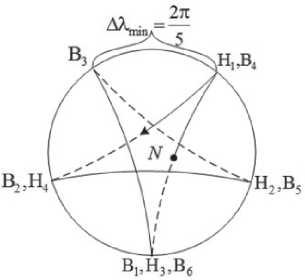
Рис. 4. Трасса полета за время
A t 1 = ( p + 1 ) Г П / 2 для орбиты q = 1, p = 5
Если же одно из чисел q или p четно, то с учетом их взаимной простоты получаем, что (q + p)/2 не является целым числом. Восходящие узлы не совпадают с нисходящими узлами, а располагаются от них на угловом расстоянии AX =(q+p-Гq+p 1)лг. = AX'min = il min ^ 2 2 min 2 p
(рис. 5).
Таким образом, для квазисинхронных орбит минимально возможное расстояние между узлами равно
АХ
min
2 л/ p , если q • p - нечетно, л/ p , если q • p - четно.
Если ширина полосы обзора находится в пределах АХэ е [ AXmin, 2AXmin), то время разрыва в наблюдении поверхности Земли вычисляется по формулам
A t1
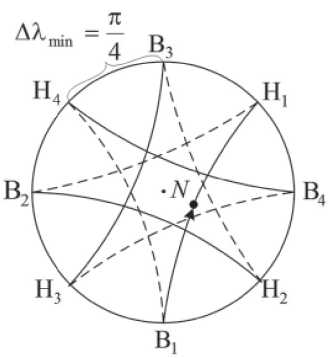
Рис. 5. Трасса полета за время A t i = pT ^ для орбиты q = 1, p = 4
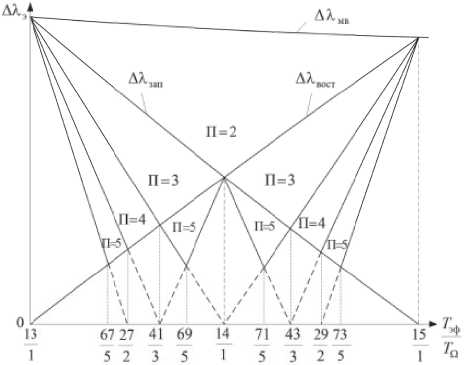
Рис. 6. Области разрывов в наблюдении
A t1
Р + U Т" t q ,
если q • p - нечетно,
pT Q , если q • p - четно .
С учетом (19-20) получим
П7 1 l +
2 2
T q + ( j1 + j 2 ) T q , если 1 - нечетно,
=
2( 1 + « + 2
T q - ( j i + j 2 ) T q , если 1 - четно.
Если AX э < AX min , то периодический обзор всей поверхности Земли невозможен. Орбиты, на которых периодический обзор не возможен, называются критическими. Условиями критичности орбит будут их квазисинхронность и наличие ширины полосы обзора, меньшей минимального расстояния между узлами [2,13].
Если AX э = AX min , то полосы обзора располагаются на экваторе встык друг к другу. То есть используется вся ширина полосы обзора. В этом случае орбиты называются оптимальными. Таким образом, условиями оптимальности орбит
являются их квазисинхронность и равенство ширины полосы обзора минимальному расстоянию между узлами [2]. На рис. 6 показаны области значений величины П в случае, когда AX э < AX мв .
Как видно из рисунка, при каждом значении величины П минимальное значение ширины полосы обзора соответствуют отношению
£Эф = p
T Ω q
квазисинхронных орбит, лежащих на
пересечении нижних границ в каждой области.
ПРИНЦИПЫ ПОСТРОЕНИЯ СИСТЕМЫ КА ПЕРИОДИЧЕСКОГО ОБЗОРА
Системы КА периодического обзора как правило строят по изомаршрутному способу [2,12], когда КА системы следуют друг за другом по од-
ной трассе полета. Обозначим через AX э ширину полосы обзора при наличии в сист n еме n КА. При наклонении i = i * и квазисинхронной
ТЭФ Р орбите = ширина полосы обзора равна TΩ q
Δλ
э
2п
— , если q • p - нечетное,
p
π
, если q • p - четное.
p
При n= 1 время разрыва в наблюдении равно
A t1 = <
Р + 1 rp ^T t q ,
если q • p
- нечетно,
p T q , если q • p - четно.
Если вдоль участка трассы полета КА, образуемого при его движении за время ∆ t 1, разместить равномерно n КА, т.е. n КА будут следовать по одной трассе через интервал времени
a ti
A t n = , то время разрыва в наблюдении всей
n поверхности Земли уменьшится в n раз, по сравнению с ∆t1 и будет равно ∆tn.
Положение КА по прямому восхождению восходящего узла орбиты Ω и по аргументу широты КА u можно определить следующим обра-
A t зом. Так как A tn = —1, то
n
2п
Ω = Ω + Δt i i 1 rp n
^ эф
2п .
ui = ui - 1 - ^A tn • T Ω
Для получения резервных орбит из всего множества квазисинхронных орбит следует остановиться на орбитах с периодом обращения меньшим, чем период обращения на штатной орбите, и обеспечивающих ширину полосы
обзора в пределах АХ э е [ АХ min , 2 АХ min ) . Кроме этого, для этих орбит разрыв в наблюдении в числе полусуток должен быть по возможности равен разрыву в наблюдении на штатной орбите. Если ширина полосы обзора уменьшится так, что орбита станет критической, то разрыв в наблюдении в числе полусуток может быть увеличен для перехода к новой квзисинхронной орбите обеспечивающей ширину полосы обзора в пределах АХ э е [ АХ min, 2 АХ min).
При проектировании систем КА в качестве показателя результативности используют набольшее время разрыва в наблюдении [2,12,14]. Поскольку период обращения КА на резервной орбите будет меньше периода обращения КА на штатной орбите, то величина максимального разрыва в наблюдении при использовании резервных орбит будет равна максимальному разрыву в наблюдении при отсутствии одного КА на штатной орбите. Поэтому результативность решения целевых задач будем характеризовать средним значением разрыва в наблюдении всеми КА системы на штатных и резервной орбитах точек на поверхности Земли - А t ср.
Рассмотрим алгоритм получения квазисин-хронных резервных орбит. Пусть число оборотов КА в сутках лежит в пределах Т эф (Т — е [ l 1, l 1 + 2] , (при необходимости диапазон числа оборотов КА в сутках может быть расширен) где l 1 – нечётное целое число из диапазона возможных значений числа оборотов в сутки [1,16]. Будем перебирать последовательно значения разрыва в наблюдении в полусутках П в сторону уменьшения, начиная со значения П на штатной орбите. Для каждого значения разрыва в наблюдении в полусутках П определяем число эффективных суток, через которые трасса полёта замыкается
[ П, если П - нечетное, q-1 П н
—, если П - четное.
[ 2
Тогда из возможных значений числа оборотов в каждых сутках в указанном диапазоне p = ql1 + 1,..., q l1 + 2q -1, оставляем только взаимно простые числа p, q и в зависимости от четности или нечетности числа П такие, у кото- рых p ⋅ q – нечётное, если П – нечётное и p ⋅ q – чётное, если П – чётное. Отобранные орбиты проверяем на выполнение условия не критичности АХэ е [АХmin,2АXmin). При необходимости увеличения количества резервных орбит или при попадании на критическую орбиту значение П последовательно может увеличиваться на единицу необходимое количество раз.
ПРАКТИЧЕСКАЯ РЕАЛИЗАЦИЯ МЕТОДИКИ
Пусть система КА наблюдения Земли, состоящая из 3 КА, построена изомаршрутно на г ТэФ 67 _ _ _ квазисинхронных орбитах — с наклоне-T— 5
нием орбиты i =88°, с шириной полосы обзора АХ э е [ АХ min, 2 АХ min ) , АХ min = 5,37о и значением П=5, обеспечивающих обзор всей поверхности земли с наибольшим разрывом в наблюде-
Л 34 То нии А л, - —.
-
3 3
Для значения разрыва в наблюдении П=5 в диапазоне числа оборотов КА в сутках T
-
— е [ 13,15 ] квазисинхронными орбитами будут т —
орбиты со значениями числа оборотов в сутках, определяемыми следующими отношениями чи-
67 69 71 73
сел p,q : —, —, —, — ( рис. 6). Если система
5 5 67
КА построена с использованием орбиты —, то орбиты ^, -у-, -у могут рассматриваться как резервные. В табл. 1 приведены параметры штатной и резервных орбит, где обозначено: высота орбит H, максимальный разрыв времени в наблюдении одним КА поверхности Земли Δt1 в числе драконических периодов обращения, ширина полосы обзора на экваторе Δlэ, угол обзора бортовой аппаратуры γ , драконический период TΩ .
В табл. 2 приведены значения средних разрывов в наблюдении Δ t ср системой КА точек на
Таблица 1. Параметры штатной и резервных орбит КА системы наблюдения Земли
|
Параметры квазисинхронной орбиты |
H , км |
А 1 1 |
АХ Э |
T — , c |
|
|
7 =20 ° |
Y =22 ° |
||||
|
p=67, q=5 |
1101 |
34T — |
7,3 |
8,1 |
6428 |
|
p=69, q=5 |
953 |
35T — |
6,34 |
7,1 |
6242 |
|
p=71, q=5 |
814 |
36T — |
5,41 |
6,01 |
6066 |
|
p=73, q=5 |
682 |
37T — |
4,53 |
5,0 |
5899 |
|
p=44, q=3 |
664 |
44T — |
4,39 |
4,9 |
5872 |
Таблица 2. Параметры наблюдения поверхности Земли системой КА
В качестве вариантов состава систем приведены: полный состав из 3 КА, неполный состав при отсутствии одного КА и составы из 3 КА при нахождении одного КА на соответствующей резервной орбите. При значениях чисел p=73, q=5 и при значении γ =20° орбита становится критической, поэтому получена резервная орбита со
T -Ф _ 44 значением П=6 с параметрами —- - —.
T Q 3
При использовании резервных орбит величина Δ t ср постепенно увеличивается с уменьшением высоты резервной орбиты, но остается меньше значения Δ t 1 при отсутствии одного КА в системе. Величина максимального разрыва в наблюдении во всех вариантах резервных орбит равна максимальному разрыву в наблюдении при отсутствии одного КА на штатной орбите, однако она наступает значительно реже, в том случае, когда плоскость резервной орбиты за счёт прецессии совпадает с плоскостью КА на штатной орбите. При отсутствии одного КА на штатной орбите максимальный разрыв в наблюдении достигается ежесуточно.
ЗАКЛЮЧЕНИЕ
Полученные результаты позволяют сделать вывод, что КА, запускаемые в нештатных ситуациях на резервные орбиты, влияют на характеристики просмотра территории земного шара. Практически сохраняются средние значения величины разрыва в наблюдении всей поверхности Земли. При этом обзор поверхности Земли будет не столь равномерным как на штатных орбитах. И, хотя величина максимального разрыва в наблюдении при использовании резервных орбит равна максимальному разрыву в наблюдении при отсутствии одного КА на штатной орбите, достигается она значительно реже. Так как принятие решения на выведение КА на резервную орбиту в ряде случаев принимается автономно во время полёта СВ, то эти орбиты КА должны быть определены до старта, а их параметры заложены на борт СВ.
Список литературы Обоснование параметров резервных орбит при выведении космического аппарата в случае возникновения нештатных условий
- Аверкиев Н.Ф. Оперативный поиск резервных орбит при управлении движением средств выведения космических аппаратов // Известия высших учебных заведений. Приборостроение. 2004. Т. 47. № 2. С. 10-15.
- Баллистические основы проектирования ракет-носителей и спутниковых систем / Аверкиев Н.Ф., Власов С.А., Кульвиц А.В. и др. СПб.: ВКА им. А.Ф.Можайского, 2017. 302 с.
- Cихарулидзе Ю.Г. Баллистика и наведение летательных аппаратов. М.: БИНОМ. Лаборатория знаний, 2014. 407 с.
- Направления развития систем управления космических средств выведения / Динеев В.Г., Жердев Ю.В., Киреев В.А., Ковригин М.И., Колозезный Э.А. // Космонавтика и ракетостроение. 1999. № 15. С. 129 - 132.
- Афанасьев В. А. Аналитическое исследование динамики полёта ЛА в атмосфере при управлении реактивными двигателями // Известия Вузов. Авиационная техника. 2008. № 3. С. 19 - 23.
