Обоснование подхода к построению системы селекции движущихся целей радиолокационной станции обнаружения малоразмерных беспилотных летательных аппаратов

Автор: Абраменков В.В., Васильченко О.В., Муравский А.П.
Журнал: Журнал Сибирского федерального университета. Серия: Техника и технологии @technologies-sfu
Статья в выпуске: 7 т.12, 2019 года.
Бесплатный доступ
В работе рассматривается вопрос обнаружения и измерения координат малоразмерных БЛА радиолокационными средствами разведки. Анализируются современные направления совершенствования систем СДЦ. На основе метода детерминированной компенсации предложена СДЦ, обеспечивающая подавление пассивных помех в зоне режекции по принципу, близкому к компенсации точечных по пространству активных шумовых помех (АШП) автокомпенсаторами с прямым обращением корреляционной матрицы помехи.
Беспилотные летательные аппараты, амплитудно-частотная характеристика, зона режекции, корреляционная матрица помехи, метод ограниченной оптимизации, вектор весовых коэффициентов
Короткий адрес: https://sciup.org/146281392
IDR: 146281392 | УДК: 621.372(075) | DOI: 10.17516/1999-494X-0178
Rationale approach to the construction of the system selection of moving targets the radar to detect small unmanned aerial vehicles
This paper discusses the detection and measurement of small UAV radar reconnaissance. Analyzed modern directions of improvement of MTI systems. Based on the method of compensation proposed deterministic sdts providing suppression of passive noise in the area of rejectio on the principle of close to compensation point in space jamming (ACP) autocompensation direct treatment of the correlation matrix of the interference.
Текст научной статьи Обоснование подхода к построению системы селекции движущихся целей радиолокационной станции обнаружения малоразмерных беспилотных летательных аппаратов
Для преодоления этих проблем необходим обширный комплекс мер, в который входят и задачи по повышению возможностей РЛС своевременно обнаруживать малоразмерные БЛА на требуемых дальностях. Для улучшения разведывательных возможностей РЛС требуется совершенствование всех ее технических систем, среди которых одно из важнейших мест занимает система СДЦ. Важность ее обусловлена тем, что в силу приведенных выше факторов сигналы малоразмерных БЛА всегда наблюдаются на фоне пассивных помех, а значит, качество работы системы СДЦ в существенной мере определяет характеристики обнаружения РЛС в целом.
Цель статьи заключается в анализе современных направлений совершенствования систем СДЦ и изложении некоторых результатов исследований этой проблемы.
Требования к характеристикам систем СДЦ РЛС, предназначенных для обнаружения малоразмерных БЛА, определяются исходя из параметров пассивных помех и обнаруживаемых целей. Известные результаты теоретических и экспериментальных исследований показывают, что превышение уровня пассивных помех над отраженными от малоразмерных БЛА сигналами может быть 60 дБ и более. В зависимости от несущей частоты сигнала РЛС, периода следования импульсов, диапазона скоростей ветра ширина спектра пассивной помехи может составлять десять и более процентов от полосы частот, определяемой средней частотой следования импульсов РЛС. В таких ситуациях спектры полезных сигналов и пассивных помех могут располагаться в непосредственной близости друг от друга или перекрываться.
С учетом перечисленных факторов можно сформулировать основные требования к амплитудно-частотной характеристике (АЧХ) системы СДЦ РЛС обнаружения малоразмерных БЛА:
-
- в области близких к нулю доплеровских частот АЧХ должна иметь зону режекции, форма которой близка к прямоугольной;
-
- глубина зоны режекции должна быть не менее 60 дБ;
-
- ширина зоны режекции должна адаптивно изменяться в зависимости от ширины спектра пассивной помехи.
Близкая к прямоугольной форма зоны режекции обеспечит эффективное разделение близкорасположенных спектров полезных сигналов и пассивных помех. Глубина зоны режекции обеспечит подавление пассивных помех до уровня, позволяющего обнаружить полезный сигнал. Изменение ширины зоны режекции необходимо для адаптации к складывающейся помеховой обстановке.
В наибольшей степени предъявленным требованиям соответствуют системы СДЦ, построенные на основе:
-
- фильтров с бесконечной импульсной характеристикой (БИХ) в виде эллиптических и подобных им фильтров [3];
-
- фильтров с зоной режекции, синтезированной методом ограниченной оптимизации [3];
-
- фильтров с зоной режекции, синтезированной проекционным методом [4].
Так, эллиптические фильтры с числом обратных связей четыре и более обеспечивают практически прямоугольную зону режекции с достаточной ее глубиной и шириной. Их недостатком является большая длительность переходных процессов, которая не позволяет войти в установившийся режим работы в ситуациях, когда число импульсов, излучаемых и принимаемых
РЛС, ограничено. На практике подобные ограничения обусловлены жесткими требованиями к скорости обзора зоны обнаружения, когда нет возможности просматривать одно направление достаточно длительное время.
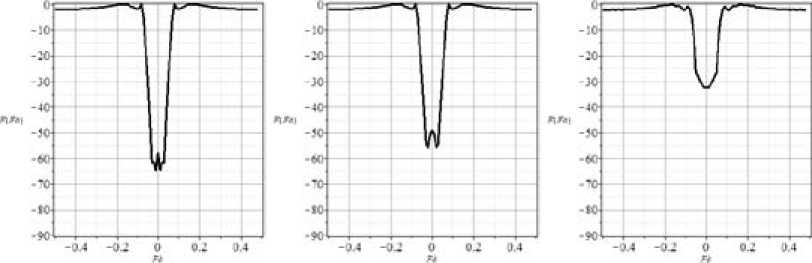
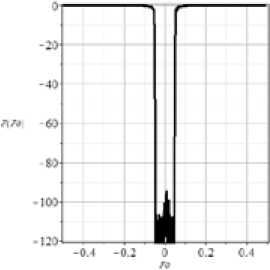
На рис. 1 представлены АЧХ эллиптического фильтра 4-го порядка РЛС производства США [3]. Полоса частот на горизонтальной оси составляет величину Δ F = ±1/2 Т п, где Т п – период следования импульсов. По вертикальной оси – нормированная к максимуму АЧХ в децибелах. АЧХ, изображенные на рис. 1, получены в условиях, когда на вход фильтра подавались пачки из 200, 100 и 50 импульсов.
На рис. 1 видно, что при числе входных импульсов N и = 200 глубина зоны режекции составляет приблизительно 60 дБ, ширина ее около 0,1Δ F , что удовлетворяет перечисленным выше требованиям к системам СДЦ РЛС обнаружения малоразмерных БЛА. При уменьшении числа входных импульсов до 100 глубина зоны режекции уменьшается до минус 50 дБ и при числе входных импульсов, равном 50, составляет приблизительно 30 дБ, что явно недостаточно для эффективной работы в условиях пассивных помех. Вторым недостатком БИХ-фильтра является сложность изменения зоны режекции, что затрудняет адаптацию к изменяющейся помеховой обстановке.
Таким образом, большая длительность переходных процессов и сложность адаптации к меняющейся помеховой обстановке препятствует использованию БИХ-фильтров в системах СДЦ РЛС обнаружения малоразмерных БЛА.
Следующий тип системы СДЦ РЛС обнаружения малоразмерных БЛА основан на использовании фильтров с АЧХ заданной формы, синтезированных методом ограниченной оптимизации [3]. В зоне режекции, расположенной в окрестности нулевых доплеровских частот, АЧХ каждого из фильтров имеют провалы заданной ширины и глубины. При формировании АЧХ j Ф n последовательно осуществляется поиск фазовых коэффициентов е s, необходимых для образования частотной характеристики фильтра Fn (X) с номером n на частоте Хтребуемой формы с использованием критерия, описываемого выражением
в
Рис. 1. АЧХ системы СДЦ на основе эллиптического БИХ-фильтра 4-го порядка в зависимости от числа входных импульсов при N и, равном: а – 200; б – 100; в – 50
Fig. 1. AFC MTS system based on elliptic IIR filter of the 4th order depending on the number of input pulses at Phi equal to: a – 200; б – 100; в – 50
5 -1
-, 5 —1
I F nn ( X )| 2 1
■ « j —( X — n)S e№ e S ( )
5 -0
min, Xp i < X < X p 2 max, X - n
, —0,5 < X < 0,5,
где S - число импульсов; X p 1 и X p2 представляют собой граничные частоты зоны режекции в области нулевых частот.
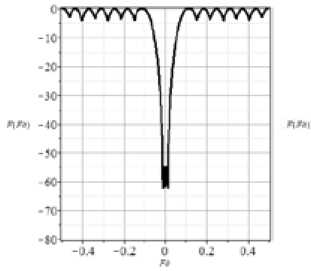
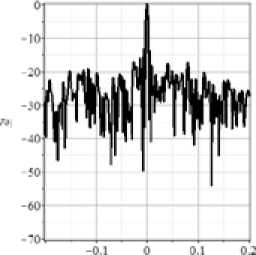
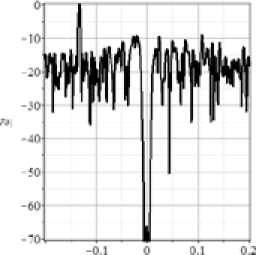
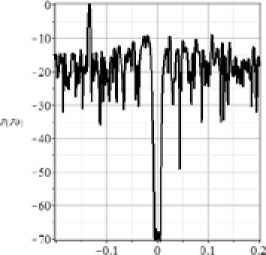
Поскольку ширина спектра пассивных помех может меняться в различных условиях, на этапе проектирования системы СДЦ формируется несколько наборов частотных фильтров с различной шириной зоны режекции. В зависимости от складывающейся помеховой обстановки используют тот или иной набор фильтров. Весовые коэффициенты, необходимые для формирования требуемых АЧХ, как правило, вычисляют методами последовательного приближения (координатный поиск, генетические алгоритмы и т. д.). На рис. 2 представлены АЧХ трех наборов фильтров для различной ширины зоны режекции. Ширина зоны режекции равна 0,01А F, 0,03А F и 0,1А F для рис. 2 а, б и в соответственно.
Анализ рис. 2 показывает, что недостатком рассматриваемого подхода является уменьшение глубины зоны режекции при увеличении ее ширины. Так, глубина зоны ре -жекции уменьшается с минус 80 дБ при ширине 0,01А F до минус 45 дБ при ширине 0,1А F. Такая глубина подавления пассивной помехи не удовлетворяет необходимым требованиям. Кроме этого, фильтры, синтезированные методом ограниченной оптимизации, имеют еще один существенный недостаток, заключающийся в уменьшении глубины зоны ре-жекции при модуляции последовательности входных импульсов вращающейся диаграммой направленности антенны. Такой вид модуляции характерен для всех РЛС кругового обзора.
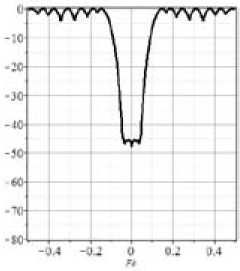
На рис. 3 представлены АЧХ системы СДЦ, основанной на так называемом проекционном методе [4].
Это один из самых новых методов синтеза фильтров с заданной формой АЧХ, сущность которого заключается в аппроксимации обратной корреляционной матрицы помехи матрицей-

а
б
Рис. 2. АЧХ системы СДЦ на основе метода ограниченной оптимизации с шириной зоны режекции: а – 0,01Δ F ; б – 0,03Δ F ; в – 0,1Δ F
в
Fig. 2. Frequency response of the system MTS based on the method of limited optimization with the width of the cut zone: a – 0.01ΔF; б – 0.03ΔF; в – 0.1ΔF
а
б
в
Рис. 3. АЧХ системы СДЦ на основе проекционного метода с шириной зоны режекции: а – 0,01Δ F ;
б – 0,03Δ F ; в – 0,1Δ F
Fig. 3. Frequency response of the system MTS based on the projection method with the width of the cutting zone: a – 0.01ΔF; б – 0.03ΔF; в – 0.1ΔF проектором (проекционным оператором) на подпространство, ортогональное подпространству помехи. Проекционный оператор имеет вид
U -1 • E - P•
Ha т\-1 HH где E - единичная матрица; P = M (M M ) M - матрица-проектор на подпространство помехи; Н- знак эрмитова сопряжения; M = [S(f1),S(f 2),...,S(fL)] - матрица, составленная из 12
вектор-столбцов сигналов, частоты Доплера которых f ,.., fL с некоторым шагом перекрывают диапазон частот ПП. U0 - вектор полезного сигнала с частотой Доплера f. С учетом приближения (2) оптимальный весовой вектор межпериодной обработки примет вид b = (E - P) * U(3)
а оптимальная процедура обработки состоит в вычислении модуля выражения y = XH(E - P)Uо,(4)
где X – вектор ожидаемого сигнала.
Анализ рис. 3 показывает, что форма АЧХ в последнем случае ближе к прямоугольной, что благоприятно сказывается на разделении близкорасположенных спектров помехи и полезного сигнала. Однако недостаток, связанный с уменьшением глубины зоны режекции при увеличении ее ширины так же, как и в предыдущем случае, не позволяет говорить о достаточной эффективности данного типа системы СДЦ.
Общим недостатком двух последних типов систем СДЦ является невозможность использования быстрых вычислительных алгоритмов типа быстрого преобразования Фурье, что существенно увеличивает вычислительные затраты при работе системы СДЦ в реальном масштабе времени. Таким образом, результаты проведенного анализа современных направлений совершенствования систем СДЦ приводят к выводу, что присущие им недостатки не позволяют эффективно использовать их для решения проблемы обнаружения малоразмерных БЛА на фоне пассивных помех.
Одной из главных причин появления отмеченных выше недостатков выступает то, что во всех перечисленных выше методах подавление пассивных помех производится до когерентного накопления сигнала или параллельно с ним. В любом случае это не позволяет достичь максимального отношения как помеха/шум, так и сигнал/шум, а значит, обеспечить наиболее , ,, эффективное подавление пассивной помехи и выделение полезного сигнала. В интересах разрешения выявленных проблем разработан метод детерминированной компенсации пассивных помех и основанная на нем новая система СДЦ, описание которых приведено ниже. Подавление пассивных помех выполняется по принципу, близкому к компенсации точечных по пространству активных шумовых помех (АШП) автокомпенсаторами с прямым обращением корреляционной матрицы помехи [4, 5].
В [6] имеется доказательство того, что в ситуации, когда число постановщиков помех равно числу компенсационных каналов автокомпенсатора, вектор весовых коэффициентов (ВВК) определяется только значениями характеристик направленности защищаемого и компенсационных каналов в направлениях на постановщиков помех. ВВК в этой ситуации имеет вид b = F—1F,
M
UКомп = Лn -IbmUm,(6)
m =1
где U - сигнал защищаемого канала; U - сигнал компенсационного канала с номером m. В ”m результате компенсации в характеристике направленности защищаемого канала формируется М «провалов» в направлениях на источники помех.
При частотной фильтрации сигналов напряжение на выходе фильтра с номером n имеет вид
MP иn =2 a mFn (Xm )+2 a pFn (Xp )•
m=1
В силу известной эквивалентности пространственной и временной обработки сигналов [3] можно считать, что в выражении (7) характеристики частотных фильтров играют роль пространственных каналов, а частоты сигналов и помех – направлений прихода сигналов и помех в пространственной области. При цифровой обработке сигналов форма характеристик частотных фильтров F n ( X m ) и F n ( X p ) известна с достаточно высокой точностью. Ширина спектра пассивной помехи также может быть измерена достаточно точно.
Этот факт позволяет назначить частоты в окрестности нулевых доплеровских частот, на которых в характеристиках частотных фильтров формируются «провалы». На основании этого согласно выражению (5) формируется ВВК. После этого согласно выражению (6), в кото- рое вместо сигналов пространственных каналов подставляются сигналы с выходов частотных фильтров, выполняется компенсация пассивных помех.
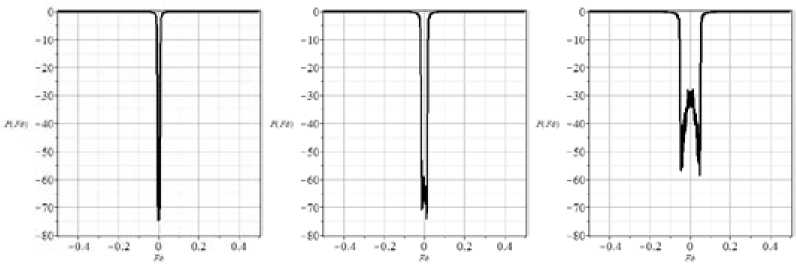
Отличительной особенностью метода и системы СДЦ является то, что подавление пассивных помех выполняется после когерентного накопления всей энергии принятого сигнала (пачки импульсов). Это дает возможность наиболее точно оценить параметры спектра пассивной помехи и повысить эффективность ее подавления. АЧХ системы СДЦ, основанной на методе детерминированной компенсации помех, представлены на рис. 4. Сравнение с представленными выше АЧХ других типов позволяет сделать вывод об устранении недостатка, связанного с уменьшением глубины зоны режекции при ее расширении.
Для подтверждения эффективности разработанной системы СДЦ была выполнена проверка ее работоспособности путем обработки экспериментальных данных. Записи экспериментальных данных были получены и предоставлены для обработки АО «ФНПЦ «ННИИРТ», г. Нижний Новгород. Задача эксперимента состояла в обнаружении малоразмерного БЛА «Banshee» радиолокационной станцией 1Л122, разработанной на этом же предприятии. Внешний вид БЛА «Banshee» изображен на рис. 5.


а
б
в
Рис. 4. АЧХ системы СДЦ на основе метода детерминированной компенсации с шириной зоны режекции: а – 0,01Δ F ; б – 0,03Δ F ; в – 0,1Δ F
Fig. 4. Frequency response of the system MTS based on the deterministic method of payment with the width of the cutting zone: a – 0.01ΔF; б – 0.03ΔF; в – 0.1ΔF

а б
Рис. 5. БЛА «Banshee»: а – на рампе; б – на пневматической катапульте
Fig. 5. UAV “ Banshee ” : a - on the ramp; б - on a pneumatic catapult
БЛА разработан в Великобритании и имеет следующие характеристики: длина 2,84 м; размах крыльев 2,49 м; максимальная взлетная масса 70 кг; максимальная скорость полета 200 км/ч. РЛС 1Л122 представляет собой малогабаритную трехкоординатную когерентноимпульсную РЛС малой дальности кругового обзора дециметрового диапазона. Внешний вид РЛС 1Л122 показан на рис. 6.
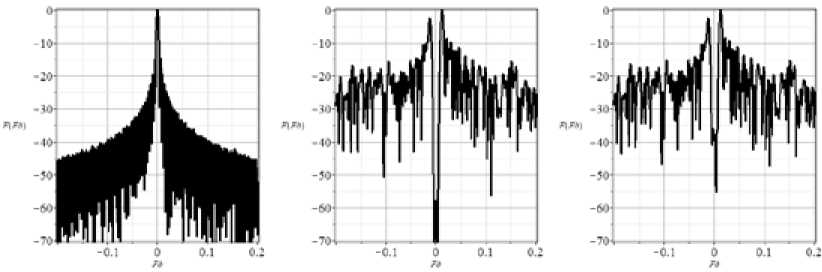
Ниже приведены некоторые результаты эксперимента. Записи отраженных сигналов обрабатывались параллельно в СДЦ на основе проекционного метода (СДЦ П) и в СДЦ на основе метода детерминированной компенсации помех (СДЦ Д). На рис. 7 а изображен спектр входного сигнала, на рис. 7 б – спектр выходного сигнала СДЦ П, на рис. 7 в – спектр выходного сигнала СДЦ Д. Результаты, представленные на рис. 7, получены при помехах слабой интенсив-

Рис. 6. РЛС 1Л122 на позиции
Рис. 6. Radar station 1L122 in position
Ft Ft Ft
а б в
Рис. 7. Спектр входного сигнала ( а ), выходного сигнала СДЦ П ( б ), выходного сигнала СДЦ Д ( в ) в пассивных помехах слабой интенсивности. Ширина зоны режекции 0,01Δ F
Fig. 7. The Spectrum of the input signal (a), the output signal MTS P (б), the output signal with D (в) in passive interference of strong intensity. The width of the cutting zone 0.01ΔF ности, что видно на рис. 7а. Здесь уровень шума превышен только главным лепестком спектра пассивной помехи, который расположен в области нулевой доплеровской частоты. Отношение помеха/шум составляет приблизительно 25 дБ. Можно видеть, что даже при таком относительно низком уровне пассивных помех отраженный от БЛА сигнал не наблюдается, поскольку в силу малой ЭПР цели находится ниже уровня помех.
В результате обработки в системах СДЦ П и СДЦ Д с шириной зоны режекции 0,01А F, АЧХ которых показаны на рис. 3 а и 4 а , пассивная помеха была подавлена и сигнал БЛА обнаруживается в обоих случаях, что видно на рис. 7 б и в. Измеренная доплеровская частота сигнала БЛА равна минус 0,13Δ F . На этих же рисунках видно, что в выходном спектре обоих типов СДЦ в области расположения главного лепестка спектра пассивной помехи сформировался глубокий провал.
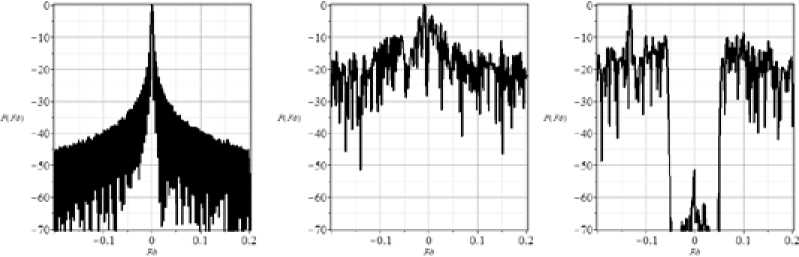
На рис. 8 представлены результаты, аналогичные результатам рис. 7, но сигнал БЛА замаскирован отражениями от пассивных помех сильной интенсивности. Отношение помеха/ шум составляет приблизительно 60 дБ. В этом случае уровень шума существенно превышен не только главным лепестком спектра пассивной помехи, но и боковыми лепестками, что видно на рис. 8 а . После обработки в СДЦ П и СДЦ Д с шириной зоны режекции 0,01Δ F отраженный от БЛА сигнал не обнаруживается, что демонстрирует рис. 8 б и в . Здесь нескомпенсированные остатки ближних боковых лепестков спектра пассивной помехи по-прежнему маскируют полезный сигнал. Представленные результаты доказывают, что для эффективной работы в условиях пассивных помех сильной интенсивности требуется расширение зоны режекции системы СДЦ.
На рис. 9 даны результаты обработки сигнала в обеих системах СДЦ с шириной зоны режекции 0,1Δ F , АЧХ которых отражены на рис. 3 в и 4 в . На рис. 3 в видно, что АЧХ системы СДЦ П при такой ширине зоны режекции обеспечивает глубину подавления пассивной помехи примерно до уровня минус 40 дБ.
Поскольку мощность сигнала пассивной помехи превосходит это значение, выходной спектр СДЦ П, изображенный на рис. 9 б , содержит нескомпенсированные остатки помехи во
а
б
Рис. 8. Спектр входного сигнала ( а ), выходного сигнала СДЦ П ( б ), выходного сигнала СДЦ Д ( в ) в пассивных помехах сильной интенсивности. Ширина зоны режекции 0,01Δ F
Fig. 8. The Spectrum of the input signal (a), the output signal MTS P (б), the output signal with D (в) in passive interference of strong intensity. The width of the cutting zone 0.01ΔF
а б в
Рис. 9. Спектр входного сигнала ( а ), выходного сигнала СДЦ П ( б ), выходного сигнала СДЦ Д ( в ) в пассивных помехах сильной интенсивности. Ширина зоны режекции 0,1Δ F
Fig. 9. Spectrum of input signal (a), output signal MTS P (б), output signal MTS D (в) in passive interference of strong intensity. The width of the cutting zone 0.1ΔF всей полосе частот. Сигнал цели не обнаруживается, что доказывает недостаточную эффективность данной системы СДЦ при работе в пассивных помехах сильной интенсивности. В спектре выходного сигнала системы СДЦ Д (рис. 9в), пассивная помеха подавлена во всей зоне режекции, а полезный сигнал отчетливо выделяется на фоне шума.
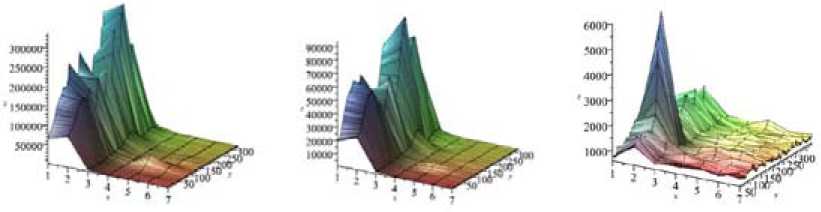
На рис. 10 представлены азимутально-дальностные развертки входного сигнала (рис. 10 а ) и выходных сигналов систем СДЦ обоих типов. БЛА расположен во втором отсчете дальности. Ширина зон режекции в обеих системах СДЦ равна 0,1А F. На рис. 10 а видно, что мощные пере-отражения от пассивных помех не позволяют обнаружить полезный сигнал. Недостаточная глубина зоны режекции системы СДЦ П (рис. 10 б ) также не дает возможность добиться требуемого результата. Обработка сигнала в системе СДЦ Д (рис. 10 в ) позволяет подавить пассивную помеху и выделить сигнал малоразмерного БЛА.
Таким образом, результаты выполненного анализа и обработки экспериментальных данных подтверждают, что система СДЦ РЛС обнаружения малоразмерных БЛА должна иметь
а б в
Рис. 10. Азимутально-дальностная развертка входного сигнала ( а ), выходного сигнала СДЦ П ( б ), выходного сигнала СДЦ Д ( в ) в пассивных помехах сильной интенсивности. Ширина зоны режекции 0,1Δ F
Fig. 10. Azimuth-position scan input signal (a), output signal sdts P (b), output signal SDS D (V) in passive interference of strong intensity. The width of the cutting zone 0,1 ΔF возможность адаптации ширины зоны режекции в зависимости от мощности пассивной помехи и ширины ее спектра. Глубина зоны режекции должна составлять 60 дБ и более независимо от ширины зоны режекции. Известные методы подавления пассивных помех не удовлетворяют этим требованиям.
В результате исследований разработана система СДЦ, удовлетворяющая предъявленным требованиям. В случае заинтересованности разработчиков отечественного радиолокационного вооружения полученными результатами возможно рассмотрение вопроса об использовании их для построения систем СДЦ разрабатываемых или модернизированных РЛС, в том числе предназначенных для обнаружения малоразмерных БЛА.
Список литературы Обоснование подхода к построению системы селекции движущихся целей радиолокационной станции обнаружения малоразмерных беспилотных летательных аппаратов
- Еремин Г.В., Гаврилов А.Д., Назарчук И.И. Малоразмерные беспилотники - новая проблема для ПВО. Арсенал отечества, 2014, 5, 12-14
- Еремин Г.В., Гаврилов А.Д., Назарчук И.И. Организация системы борьбы с малоразмерными БЛА. Арсенал отечества, 2014, 6, 12-14
- Справочник по радиолокации. Под ред. М.И. Сколника. М.: Техносфера, 2015. 672 с.
- Григорьев В.А. Адаптивные антенные решетки. СПб: Университет ИТМО, 2016. 179 с.
- Уидроу Б., Стирнз С. Адаптивная обработка сигналов. М.: Радио и связь, 1989
- Абраменко В.В. Васильченко О.В. Структура выборочной корреляционной матрицы помехи и вектора весовых коэффициентов компенсатора активной шумовой помехи при различных соотношениях между числом помеховых сигналов и числом компенсационных каналов. Информационно-измерительные управляющие системы, 2012, 10(1), 54-64
