Обоснование технических характеристик и выбор направления развития бортовых вычислительных систем для сервисного космического аппарата

Автор: Алексеев Владимир Ильич
Рубрика: Управление сложными системами
Статья в выпуске: 3, 2022 года.
Бесплатный доступ
На основе материалов из открытых информационных источников дан краткий анализ современного состояния космической робототехники и сервисного космического обслуживания в России и мире. Представлены результаты анализа документов, позволяющих сформулировать цели и задачи деятельности в области сервисного космического обслуживания. Разработаны предложения по обоснованию технических характеристик и выбору бортовой вычислительной системы для сервисного космического аппарата.
Космонавтика, ракетно-космическая техника, космическая робототехника, бортовая вычислительная система, программное обеспечение, сервисный космический аппарат, малые космические аппараты
Короткий адрес: https://sciup.org/148325184
IDR: 148325184 | УДК: 629.7 | DOI: 10.18137/RNU.V9187.22.03.P.089
Substantiation of technical characteristics and choice of the direction of development of onboard computing systems for a service spacecraft
In this article, based on materials from open information sources, a brief analysis of the current state of space robotics and space service in the world and Russia is given. The results of the analysis of documents allowing to formulate the goals and objectives of activities in the field of space service are presented. Proposals have been developed to substantiate the technical characteristics and the choice of an on-board computer system for a service spacecraft.
Текст научной статьи Обоснование технических характеристик и выбор направления развития бортовых вычислительных систем для сервисного космического аппарата
Космическим аппаратам (далее – КА) на орбите, как старым, так и новым, требуется сервисное обслуживание для продолжения их работы в перспективе. И если малые космические аппараты (далее – МКА) в силу их относительной дешевизны в случае отказа можно заменить аналогичным КА, то дорогие и большие КА и системы в приемлемые сроки заменить невозможно. Чтобы такие аппараты работали долго, требуется энергия, топливо и рациональная модернизация. В связи с этим возникает необходимость переноса эксплуатационного обслуживания в космос.
Полноценную работу на орбите можно обеспечить только с помощью специальных сервисных космических аппаратов (далее – СКА), посре дством которых можно прово © Алексеев В.И., 2022
Алексеев Владимир Ильич преподаватель. Военно-космическая академияя имени А.Ф. Можайского, Санкт-Петербург. Сфера научных интересов: автоматика, телемеханика, вычислительная техника. Автор более 20 опубликованных научных работ.
дить обслуживание дорогостоящих космических аппаратов связи, телекоммуникации и дистанционного зондирования Земли с целью продления их ресурса [2].
Одно из направлений развития ракетно-космической техники, подлежащих автоматизации робототехническими средствами, – создание сервисных космических аппаратов, с помощью которых возможны следующие перспективы развития эксплуатационного обслуживания:
-
• диагностика и инспекция технического состояния обслуживаемых космических объектов;
-
• установка на функционирующие КА дополнительной полезной нагрузки;
-
• автоматизация сборки структуры космических аппаратов. орбитальный монтаж и сервисное обслуживание космических объектов;
-
• довыведение на целевую орбиту в случае аварии разгонных блоков или спуск с орбиты космического мусора;
-
• транспортировка и подъем действующих космических аппаратов с низких круговых орбит на рабочую орбиту;
-
• корректировка положения на орбите действующего КА, у которого полностью израсходован запас рабочего тела;
-
• задачи транспортировки к месту сборки фрагментов монтируемых конструкций, их монтаж и демонтаж, модернизация, ремонт, заправка;
-
• очистка геостационарной орбиты от отслуживших КА, техногенного мусора.
Сервисные космические аппараты строятся на базе малых космических аппаратов, к которым обычно относятся аппараты с массой в пределах 500…1000 кг.
Примером сервисного космического аппарата является сервисный спутник Mission Extension Vehicle (MEV) – аппарат продления миссии, который может стыковаться не только с действующими спутниками клиентов, обеспечивая маневрирование и контроль ориентации, необходимые для продления их существования, но и со старыми моделями [1].
Подтверждением является состоявшийся эксперимент по восстановлению работы спутника связи Intelsat 901. Космический аппарат MEV-1 в феврале 2020 года впервые состыковался со спутником связи, находящимся на орбите захоронения, и с помощью ионных двигателей перевел его в рабочую точку стояния на геостационарной орбите.
Технология орбитальной заправки отрабатывалась на МКС в 2013–2018 годах. В ходе испытаний робот Dextre имитировал заправку спутника: перерезал проволочную пломбу бензобака, сворачивал заглушку, накручивал переходник для заправки и заправлял топливом.
В настоящее время предлагается следующее поколение сервисных космических аппаратов – система Mission Extension Pod (MEP) – подвесной двигатель для продления миссии, которая является меньшей по габаритам и выполняет только функцию управления орбитой. Но в то же время MEP оборудуется роботизированным обслуживающим
Обоснование технических характеристик и выбор направления развития ...
транспортным средством, называемым Mission Robotic Vehicle (MRV) , – транспортный мобильный робот, который может выполнять все функции MEV, добавляя новые роботизированные возможности для дополнительных услуг (см. Рисунок 1).
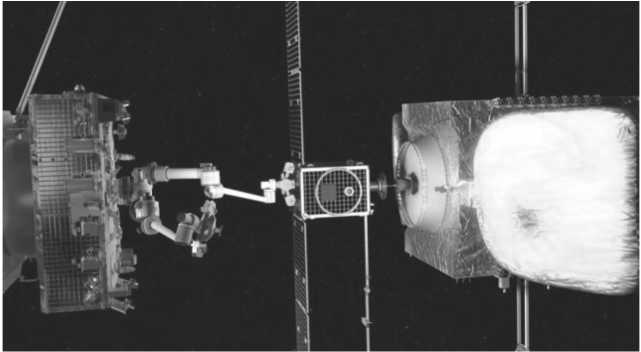
Рисунок 1. Космический аппарат MEV, оборудованный роботизированным устройством
После того как MEV-1 вернул Intelsat 901 для обслуживания в назначенное место, Intelsat перевел на спутник примерно 30 своих коммерческих и государственных заказчиков.
Тенденции в отечественных разработках БВС СКА
Основу системы управления современных малых космических аппаратов составляют бортовые вычислительные системы (далее – БВС), которые характеризуются большим объемом программного обеспечения, сложным взаимодействием составных частей при реализации многочисленных алгоритмов управления, разнообразием способов взаимодействия с реальной аппаратурой, возможностью наращивания вычислительных средств и замены версий штатного программного обеспечения [6].
Сегодня разработчики БВС вынуждены учитывать состояние в отечественной электронной промышленности:
-
• отсутствие полного комплекта радиационно стойких ИМС с гарантированными характеристиками для построения высокопроизводительного БВС с освоенным общим программным обеспечением [10];
-
• отсутствие единого технологичного конструктива.
Это ведет к использованию зарубежных комплектующих, обладающих необходимыми функциональными возможностями, элементной базы и отдельных плат, реализации специальных мер по их отбору, дополнительной защите и адаптации для космических применений [5; 8].
С другой стороны, создаются определенные проблемы при решении, не учитывающие особенности МКА:
-
• использование многоканальной архитектуры БВС (до 5) с аппаратным или программным мажорированием трех постоянно включенных комплектов;
-
• излишняя автономность систем, включающих большое количество автономных приборов, не позволяющая эффективно использовать возможности БВС;
-
• сбор, хранение, обработка и сброс результатов телеметрических измерений средствами автономной бортовой системы телеметрических измерений;
-
• использование мультиплексного канала обмена (далее – МКО) при малой его информативности.
БВС представляет собой распределенную вычислительную систему, которая включает системный контроллер (далее – СК), высокопроизводительную микроЭВМ и специализированные локальные контроллеры (далее – ЛК), обслуживающие несколько систем.
На Рисунке 2 приводится структура БВС МКА [4], в которой учтены тенденции, просматриваемые как в зарубежных, так и в отечественных проектах, а также предлагаются некоторые новые решения, продиктованные сегодняшними реалиями.
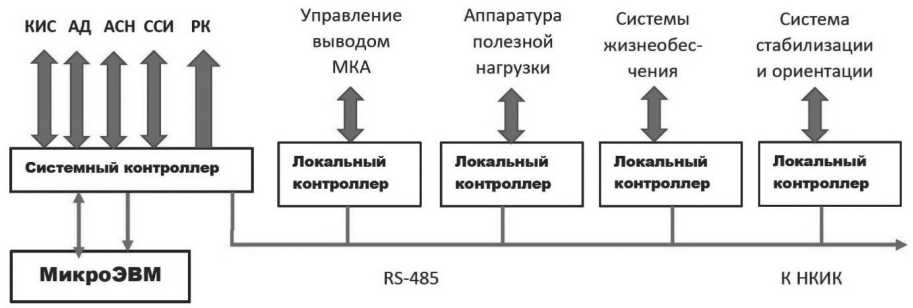
Рисунок 2. Структура бортовой вычислительной системы малого космического аппарата
Системный контроллер является ядром БВС и контроллером сети, а во время сеанса связи с НКУ – удаленным терминалом радиоканала Земля – МКА. Он выполняет следующие функции:
-
• двусторонний обмен по радиальным связям:
-
a) с приемником и передатчиком бортовой командно-измерительной системы (далее – КИС),
-
b) с астродатчиком (далее – АД);
-
c) с аппаратурой спутниковой навигации (далее – АСН),
-
d) с аппаратурой системы сбора измерений (далее – ССИ);
-
• двусторонний обмен с микроЭВМ;
-
• низкоинформативный обмен с локальными контроллерами (далее – ЛК) систем по магистрали RS-485;
-
• выдача разовых команд в соответствии с информацией, полученной от микроЭВМ или при отработке временной программы;
-
• верификация команд и командно-программной информации, поступающей по радиолинии с НКУ, передача их в микроЭВМ или хранение в отказоустойчивом ОЗУ в форме временных программ;
-
• отработка режимов включения ЛК и другой бортовой аппаратуры с выдачей соответствующих разовых команд;
-
• диагностика состояния и реконфигурация микроЭВМ, КИС, ССИ, АСН, АД, ЛК и магистрали;
-
• отказоустойчивое хранение системной информации и вычислений микроЭВМ.
МикроЭВМ выполняет вычисления, не требующие жесткой привязки к реальному времени, но использующие значительные ресурсы:
-
• выполнение полетного задания;
Обоснование технических характеристик и выбор направления развития ...
-
• формирование планов целевой работы;
-
• проведение навигационных вычислений по информации АСН и АД;
-
• подготовка отчетов для НКУ;
-
• подготовка временных программ для СК и ЛК, выполняемых в процессе целевой работы.
В БВС предусматриваются три режима управления, которые могут быть реализованы в зависимости от состояния аппаратно-программных средств, появления незапланированных ситуаций, выработке ресурса:
-
1. Режим координатно-временного управления в автономном полете согласно полетному заданию, по результатам выполнения алгоритмов в микроЭВМ, а также автономных и временных программ, реализуемых СК и ЛК.
-
2. Программно-временной режим, при котором вычисления выполняются на земле, а при сеансе связи через КТС происходит загрузка аналогичных временных программ непосредственно в СК и ЛК и их отработка. Режим может использоваться при отработке непредусмотренных ситуаций, в случае отказа аппаратно-программных средств микроЭВМ, при реализации частных программ.
-
3. Аварийный режим не предусматривает выполнения целевой функции, а служит для сохранения оставшихся ресурсов МКА, получения максимально возможной диагностической информации при полном или частичном функционировании систем жизнеобеспечения. При этом СК и ЛК реализуют автономные программы, оставляя во включенном состоянии необходимый минимум аппаратуры.
В любом режиме сохраняется возможность выдачи разовой команды для немедленного исполнения в сеансе связи через командную матрицу СК.
Бортовые вычислительные системы МКА относятся к классу специализированных вычислительных систем и отличаются от универсальных вычислительных систем следующими специфическими требованиями [6]:
-
• обработка информации, расчет векторов управления движением и функционированием бортовой аппаратуры и их реализация осуществляются в соответствии со скоростью полета МКА;
-
• взаимосвязь с большим количеством разнотипных внешних абонентов, различающихся как по назначению, так и по принципам построения;
-
• постоянство и цикличность большинства решаемых задач в процессе эксплуатации;
-
• особые условия функционирования, например, большие вибрации и перегрузки, факторы космического полета (ионизирующие излучения, перепады температур);
-
• обеспечение радиационной стойкости и отказоустойчивости;
-
• ограниченность аппаратных и вычислительных ресурсов вследствие размещения вычислительных систем на борту МКА;
-
• повышенные требования к надежности функционирования.
Основные характеристики БВС
Совокупность свойств БВС, которые необходимо учитывать при их создании, применении в МКА и оценке эффективности управления запуском, определяется набором характеристик, которые можно разделить на следующие группы:
-
• информационные;
-
• технико-экономические;
-
• эксплуатационные;
-
• характеристики надежности.
К основным информационным характеристикам относятся следующие.
Производительность ( W ), характеризуется средним количеством вычислительных операций в единицу времени при решении типовой задачи:
W = О тип , ( он / c ),
A tTHn где Qтип – общее количество вычислительных операций, которые необходимо выполнить для решения эталонной задачи с заданной точностью; Δtтип – с заданным временем решения типовой задачи.
Частной характеристикой производительности является быстродействие ( С ), определяемое временем выполнения короткой (сложение) или длинной операции (умножение, деление) над операндами:
C =---- или C =--, tKOP tdn где tкор и tдл – время выполнения короткой и длинной операции соответственно.
Известны разработанные БВС с быстродействием более 10 млн кор.оп./с.
Емкость памяти ( N ), определяется количеством машинных слов, размещаемых одновременно в ЗУ различных типов.
Для современных БЦВМ характерны следующие данные: N озу = (0,5…8) Кслов, N пзу = (8…64) Кслов (здесь К = 210 = 1024), N взу – несколько МБ, N созу – от единиц до нескольких десятков слов. БЦВМ ближайшей перспективы будут иметь ОЗУ и ПЗУ емкостью несколько сотен Кслов каждое.
Требования к памяти противоречивы; с одной стороны, требуется высокое быстродействие (время записи/считывания данных), с другой – большая емкость и низкая стоимость. Удовлетворить этим требованиям в одном типе ЗУ не удается, поэтому память БВС реализуется несколькими типами ЗУ, обладающими разными характеристиками и выполняющими различные операции.
Для согласования высокого быстродействия микропроцессора с ограниченным быстродействием ОЗУ и ПЗУ в современных БВС используются устройства локальной процессорной памяти малой емкости (несколько слов) и повышенного быстродействия – сверхоперативные ЗУ (далее – СОЗУ).
СОЗУ включается в состав процессора в виде регистра общего назначения или служебных ячеек ЗУ и обеспечивает кратковременное хранение промежуточных результатов, базовых адресов, индексов и др. Время обращения к СОЗУ составляет порядка 10 нс. ОЗУ и ПЗУ при наличии локальной памяти принято называть основной памятью.
ПЗУ предназначено для хранения команд и констант, а ОЗУ – исходных данных, промежуточных и окончательных результатов. Время считывания информации из ОЗУ и ПЗУ в зависимости от их аппаратной реализации может колебаться от единиц наносекунд до единиц микросекунд.
Основная память ряда современных БВС выполнена на полупроводниковых ЗУ, обладающих высоким быстродействием. Для исключения потери информации предусмотрена возможность программной регенерации памяти путем повторного включения питания.
Для хранения больших массивов информации на борту современных КА могут использоваться внешние ЗУ, выполненные на основе накопителей на ферритовых стержнях, магнитной ленте, дисках. Емкость таких ЗУ может достигать сотни тысяч мегабайт, а время считывания – от единицы до сотни микросекунд.
Обоснование технических характеристик и выбор направления развития ...
Разрядность представления данных в БЦВМ определяет точность вычислений. Конечная разрядная сетка – основная причина возникновения ошибок округления. В настоящее время в БЦВМ нашли применение форматы данных в 16, 32, 64 разряда. Для хранения операндов в ряде БЦВМ используется 16- и 32-разрядная сетка. Для вычислений с более высокой разрядностью используются программные способы.
Система команд, форматы команд и данных. Малое число команд (20…30), характерное для первых образцов БЦВМ, усложняет программирование. Поэтому современные машины имеют развитую систему, включающую в свой состав 50…60 команд. Большинство БЦВМ являются одноадресными, так как такие машины имеют меньший вес и габариты, чем двух- и трехадресные.
Для представления чисел в БЦВМ используется двоичная форма, для большинства БЦВМ – с фиксированной запятой. Последнее уменьшает объем и упрощает структуру аппаратных средств, но значительно дорожает программирование ( ~ 1/3 времени программирования тратится на масштабирование). Наряду с этим имеются БЦВМ, в которых числа представляются кодами с плавающей запятой.
Скорость передачи информации при обмене характеризуется количеством двоичных единиц информации (бит), передаваемых в единицу времени. Она составляет до нескольких десятков килобод (1 бод = 1 бит/с).
Под надежностью БВС понимается ее свойство сохранять во времени в установленных пределах значения всех параметров, характеризующих способность БВС выполнять требуемые функции в заданных режимах и условиях применения.
Показатели надежности БВС следующие.
Вероятность безотказной работы в течение заданного времени t функционирования БВС:
P(t) = P(THap > tзад) , где Тнар – интервал работы БВС от момента включения до первого нарушения работоспособности (наработка на отказ).
Надежность однотипных устройств или элементов с точки зрения продолжительности их работы до первого отказа можно оценить средним временем безотказной работы Т ср , под которым понимается математическое ожидание времени безотказной работы: to
Tcp = JtP ( t)dt, где Р(t) – вероятность безотказной работы за время t.
В общем случае рассматриваемый показатель называют средней наработкой до отказа.
Также используется комплексные показатели надежности – коэффициенты готовности, технического использования, планируемого применения, оперативной готовности и сохранения эффективности. Это интегральный коэффициент сохранения эффективности (КСЭ), характеризующий не только надежность, но и вычислительные возможности БВС:
n
Kэф = £Kэф.jPj (t) , j=1
где Kэф.j – коэффициент сохранения эффективности БВС в j-м техническом состоянии, вычисляемый как отношение значения показателя эффективности БВС, (например, производительности) за определенный период эксплуатации к номинальному значению этого показателя; Рj(t) – вероятность j-го технического состояния БВС в течение времени функционирования t; n – количество возможных технических состояний. Под j-м техническим состоянием понимается состояние БВС, обусловленное отказом j-го узла или блока.
Для современных БЦВМ среднее время безотказной работы составляет от нескольких тысяч до десятков тысяч часов.
Вероятность безотказной работы БЦВМ лежит в пределах Р(t ф ) = 0,990…0,999. Для современных БВС P( t ) = 0,994…0,997, а Т ср = 104 … 105 ч.
Высокие надежностные характеристики достигаются как за счет успехов в области микроэлектроники, так и за счет использования различных видов избыточности. БВС, реализованная на базе трех вычислительных модулей, работающих параллельно [3], используется как специализированный вычислительный комплекс.
Также возможно применение схемы с ненагруженным резервированием большинства модулей и нагруженным («теплым») резервированием БВС. «Теплое» резервирование БВС означает, что от момента отделения от разгонного блока ракеты-носителя на резервную БВС подано питание, но она находится в неактивном состоянии до тех пор, пока основная машина управляет КА. При отказе основной БВС резервная БВС берет управление на себя и начинает производить операции по парированию сбоев, а также выбора необходимого комплекта оборудования [6].
Технико-экономические характеристики позволяют оценить пригодность БВС к использованию с точки зрения различного рода ресурсов.
Массово-габаритные характеристики и энергопотребление БВС определяются элементной базой и технологией изготовления и связаны с затратами энергетических ресурсов.
Одним из главных условий оптимизации технико-экономических характеристик является стандартизация и унификация , которые достигается программной и электрической совместимостью узлов, приборов и устройств БВС, а также расширением возможностей многократного применения. Например, по некоторым данным, БЦВМ «Салют-5М» используется на КА до четырех раз, при этом ее повторное применение обходится в 15…20 раз дешевле, чем использование новой машины.
Эксплуатационные характеристики микропроцессорных БВС отражают продолжительность жизненного цикла БВС – от изготовления до наступления предельного состояния,; при этом резко возрастает интенсивность отказов из-за старения элементной базы, а также степень приспособленности БВС к реальным условиям применения, например, воздействие факторов ядерного взрыва или космического излучения, колебаний питающего напряжения, включая возможность кратковременного отключения питания, и др.
Выводы
Кроме рассмотренных выше характеристик БВС для полноценного использования задач сервисного космического аппарата необходимо, чтобы бортовые вычислительные системы обладали специфическими аппаратными и программными характеристиками:
-
• возможность многократного использования в течение длительного периода (10…20 лет) базовой платформы МКА с разной комплектацией полезной нагрузки и при существенно отличающихся радиационных условиях;
-
• радиационно стойкое исполнение по накопленной дозе порядка 300 кРад;
-
• особые условия функционирования, например, большие вибрации и перегрузки (до 40 g), факторы космического полета (ионизирующие излучения, перепады температур);
-
• обеспечение стойкости к тяжелым заряженным частицам до 120 МэВ;
Обоснование технических характеристик и выбор направления развития ...
-
• удобство смены и ремонта приборов, приспособленность к условиям транспортировки и хранения;
-
• функционирование в реальном масштабе времени (обработка информации, расчет векторов управления движением и функционированием бортовой аппаратуры, их реализация осуществляются при заданной скорости полета МКА). Для этого необходимо использовать операционную систему реального времени, которая должна обеспечивать возможности своевременной реакции БВС на происходящие события, в том числе на одновременно происходящие события [9; 12];
-
• уменьшение массово-габаритных характеристик и энергопотребления БВС, которые определяются элементной базой и технологией изготовления и связаны с затратами энергетических ресурсов. Например, использование БИС и СБИС позволит обеспечить энергопотребление современных БВС до 10 Вт (на одну грань) и массой до 5 кг (в трехканальном исполнении) [8];
-
• использование оперативной памяти до 1 Гбайта и высокопроизводительных процессоров (порядка 66 MIPS);
-
• высокая отказоустойчивость; полностью «прозрачная» схема резервирования должна быстро создавать высоконадежные вычислительно-управляющие устройства с тройным, четырехкратным (и более) резервированием.
На сегодняшний день можно выделить следующие направления развития БВС сервисных космических аппаратов:
-
• построение БВС по модульному принципу, допускающее их относительно независимую разработку. Использование принципа модульности при проектировании космического аппарата позволяет свести проектирование к созданию функционально независимых отдельных модулей, совместно выполняющих заданные функции системы с требуемой эффективностью, и значительно сокращает затраты на разработку, внедрение и модификацию систем. Любые параметры, влияющие на управление и управляемость СКА, должны иметь возможность реконфигурации;
-
• унификация БВС различных классов изделий, создание единого унифицированного ряда и интерфейса БВС, единого конструктивно-функционального модуля;
-
• интеграция в БВС не только функций по управлению движением и навигацией, но и систем аварийной защиты двигательной установки, навигационной аппаратуры потребителя, системы телеметрических измерений и других систем;
-
• обеспечение радиационной стойкости на длительный срок активного существования, унификация стойких и нестойких к поражающим факторам ядерного взрыва БВС;
-
• совершенствование элементной базы вычислительных машин классической архитектуры;
-
• применение новых материалов и принципов обработки информации для построения аппаратной части вычислительных машин (оптические вычислительные машины и вычислительные машины на основе биотехнологий);
-
• разработка новых архитектурных подходов к построению ЭВМ;
-
• расширение области применения БВС на основе новых алгоритмов и методов цифровой обработки информации;
-
• создание эффективных БВС при жестких ограничениях на массогабаритные и энергетические характеристики;
-
• применение новых физических принципов для выполнения обработки и хранения данных.
Список литературы Обоснование технических характеристик и выбор направления развития бортовых вычислительных систем для сервисного космического аппарата
- Белоножко П.П. Космическая робототехника для монтажа и сервиса. Потенциальные задачи, концепции перспективных систем // Воздушно-космическая сфера. 2019. № 2 (99). С. 84–97.
- Белоножко П.П. Перспективные монтажно-сервисные роботизированные космические модули // Робототехника и техническая кибернетика. 2015. № 2. С. 18–23.
- Больше малых ИСЗ // AWST, 2012, No. 27, pp. 36–39.
- Бомштейн Г.К. Разработка и применение малых спутников как актуальное направление развития беспилотной космонавтики // Полет. 2013. № 9. С. 51–60.
- Борисов Ю.И. Отечественная электронная промышленность и компонентная база. Перспективы развития // Электроника: НТБ. 2006. № 2. С. 6–9.
- Бровкин А.Г., Бурдыгов Б.Г., Гордийко С.В. Бортовые системы управления космическими аппаратами: учебное пособие. М.: Изд-во МАИ-ПРИНТ, 2010. 304 с.
- Васильев В.Н. Космические аппараты дистанционного зондирования Земли. М.: ВНИИ ЭМ, 2009. 310 с.
- Гобчанский О.П. Проблемы создания бортовых вычислительных комплексов малых космических аппаратов // Современные технологии автоматизации. 2001. № 4. С. 28–34.
- Гома Х. Проектирование систем реального времени, распределенных и параллельных приложений. М.: ДМК Пресс, 2011. 700 с.
- Даляев И.Ю., Шардыко И.В., Кузнецова Е.М. Перспектива создания роботизированных сервисных спутников для технического обслуживания и продления сроков активного существования космических аппаратов // Робототехника и техническая кибернетика. 2015. № 3. С. 27–31.
- Захаров И.В., Кремез Г.В., Фатеев В.Ф., Швецов А.С., Шпак А.В. Многопроцессорная перестраиваемая бортовая вычислительная система малого космического аппарата // Известия вузов. Приборостроение. 2007. Т. 50, № 6. С. 49–52.
- Бурдонов И.Б., Косачев А.С., Пономаренко В.Н. Операционные системы реального времени [Электронный ресурс]. URL: www.ispras.ru/ru/preprints/docs/prep_14_2006.pdf (дата обращения: март 2022).
- Исследование рынка малых космических аппаратов в ретроспективе 2002–2013 гг. и с прогнозом до 2020 г. [Электронный ресурс]. URL: http://o2consulting.ru/articles/market- research-mka (дата обращения: март 2022).
- Каргу Д.Л., Кремез Г.В., Минаков Е.П., Николаев П.В., Федоров С.А. Малогабаритный бортовой комплекс управления космическим аппаратом // Известия вузов. Приборостроение. 2009. Т. 52, № 4. C. 66–69.
- Катькалов В.Б. Космические услуги и операции: состояние и перспективы // Воздушно-космическая сфера. 2020. № 2. С. 72–80.
- Лопота А.В., Юревич Е.И. Этапы и перспективы развития модульного принципа построения робототехнических систем // Научно-технические ведомости СПб ГПУ. 2013. № 1. С. 98–103.
- Лысый С.Р. Научно-технические проблемы и перспективы развития робототехники специального (космического) назначения // Экстремальная робототехника: труды международной научно-технической конференции. СПб.: Политехника-сервис, 2015. С. 29–32.
- Микрин Е.А., Суханов Н.А., Платонов В.Н. Принципы построения бортовых комплексов управления автоматических космических аппаратов // Проблемы управления. 2014. № 3. С. 62–67.
- Павлов А.М. Принципы организации бортовых вычислительных систем перспективных летательных аппаратов // Мир компьютерной автоматизации. 2001. № 1.
- Роботы-пауки построят космические аппараты на орбите [Электронный ресурс]. URL: http://www.popmech.ru/technologies/14650-roboty-pauki-postroyat-kosmicheskie-apparaty- na-orbite (дата обращения: март 2022).
- Сборка в космосе [Электронный ресурс]. URL: http://www.assemblingonspace.ru (дата обращения: март 2022).
