Обоснование величины зон опасных движений человека и опасных зон оборудования

Автор: Гайдуков Константин Владимирович, Зарубин Игорь Валерьевич
Журнал: Агротехника и энергообеспечение @agrotech-orel
Рубрика: Техносферная безопасность процессов и производств
Статья в выпуске: 3 (7), 2015 года.
Бесплатный доступ
В данной статье выявлены и раскрыты причины травматизма при эксплуатации оборудования и предложены пути их решения.
Охрана труда, травматизм, оборудование, опасные зоны, эргономика, защитные ограждения
Короткий адрес: https://sciup.org/14770097
IDR: 14770097 | УДК: 614.8.027
Justification of the value of human movement of hazardous zones and danger zones equipment
This article identifies and discloses the reasons of the accidents in the equipment operation and the ways of solution is proposed.
Текст научной статьи Обоснование величины зон опасных движений человека и опасных зон оборудования
Причинами травматизма при эксплуатации оборудования часто становятся одновременное нахождение человека в опасной зоне и его неправильные действия. Обычно опасные зоны оборудования закрывают ограждениями и кожухами, однако при проведении технического обслуживания, контроле исправности оборудования оператор вынужден снимать ограждения, находиться в опасной зоне. В этих случаях работа в опасных зонах дополнительно регламентируется организационно-техническими мероприятиями: работа по наряду-допуску, разработка технологических карт на обслуживание и ремонт, применение специальной оснастки для проведения работ.
В реальных условиях попадание человека в опасную зону может быть непроизвольным, в результате потери равновесия человеком, вынужденных действий человека при аварийных ситуациях, непроизвольных действий других лиц, например толчка, а также условных и безусловных рефлексов самого человека. Если опасные зоны оборудования регламентируются исходя из особенностей его работы, то зоны опасных движений человека как субъекта технологического процесса не изучены, также не ясно взаимное влияние опасных зон оборудования и возможных зон опасных движений человека. Поэтому, исходя из биомеханики движений человека, следует обосновать зоны опасных движений человека во взаимосвязи с опасными зонами оборудования и эргономикой рабочего места.
В настоящее время большое внимание уделяется эргономике органов управления машинами и оборудования, в тоже время удобство обслуживания, эргономика рабочего места обслуживающего персонала не является приоритетом. Современное оборудование имеет блокировки и отключающие устройства, имеющие определенную степень быстродействия, поэтому зная кинематические характеристики биомеханики человека, можно спрогнозировать величину опасной зоны. Размеры опасной зоны можно определить следующим выражением:
f x = x„ + V • t + ax —
-
0 xx
-
y = У о + V • t+ ay • t-(1)
t2
-
z = z о + Vz • t+ az • —
-
где x,y,z – координаты опасной зоны в зависимости от источника опасности и биомеханики человека;
-
x0,y0,z0 – расстояние от источника опасности до защитного ограждения;
-
Vx,Vy,Vz – средние значения начальных скоростей человека при выполнении операций обслуживания оборудования в
соответствующих координатных осях;
-
a x ,a y ,a z - средние значения ускорений человека при выполнении операций обслуживания оборудования в соответствующих координатных осях;
-
t – время срабатывания отключающего устройства.
При построении рабочей модели человека в биомеханике делают, как правило, следующие допущения [1]:
-
- звенья модели (части тела человека) абсолютно твердые, то есть не деформируются ни при каких обстоятельствах;
-
- геометрические параметры и масса звеньев модели (их длина и пр.) совпадают с соответствующими параметрами сегментов тела человека;
-
- звенья модели соединены в идеальные кинематические пары сферическими (шаровыми) или цилиндрическими шарнирами.
Для исследования биомеханики человека в положении «стоя» может быть применена упрощенная модель [2-6], представленная на рисунке 1. Движения человека имеют определенную моторику – последовательность действия мышц, нервной системы. В этом легко убедиться по привычкам по двигательным реакциям людей на определенные действия, по типу походки. Определенные стереотипы движений могут формироваться как на основе физиологических особенностей, так и в ходе целенаправленных тренировок.
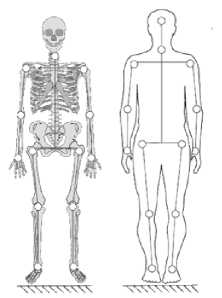
Рисунок 1 – Упрощенная биомеханическая модель человека в положении «стоя»
При обслуживании машин и оборудования могут применяться упрощенные модели конечностей, например модель руки (рис. 2).
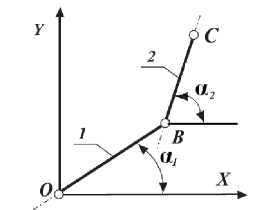
Рисунок 2 - Упрощенная плоская биомеханическая модель руки
Кинематику руки можно описать выражением:
-
x = 1 • cos a + li • cos a
< 1 1 1 2 2 (2)
y 1 = 1 1 • sin a 1 + 1 2 • sin a 2
где x 1 ,y 1 – координаты движения руки при исследовании биомеханики руки человека;
-
l 1 ,l 2 – длина плеча и предплечья человека;
a i ,a 2 - углы поворота плеча и предплечья относительно горизонта.
Продифференцировав выражение (2) мы можем получить скорость движения руки:
<
Vx 1 = - 1 1 • sin a 1 - 1 2 • sin a 2
Vy 1 = 1 1 • cos a 1 + 1 2 • cos a 2
где Vx 1 ,Vy 1 –скорости руки человека при выполнении операций обслуживания оборудования в соответствующих координатных осях.
Ускорения, возникающие при движении руки можно получить путем дифференцирования выражения (3):
ax 1 = -11 • cos a1 -12 • cos a2 ay 1 = -11 • sin a1 -12 • sin a2
где ax1,ay1 -значения ускорений руки человека при выполнении операций обслуживания оборудования в соответствующих координатных осях.
Исследовав характер движения конечности – руки, на основании полученных выражений определим средние значения скорости и ускорений, что позволит рассчитать опасную зону оборудования при его обслуживании с учетом биомеханических показателей человека. Следует отметить тесную взаимосвязь эргономики рабочего места с характером движений человека. Для уточнения расчетных зависимостей, возможно, воспользоваться результатами видеосъемки с использованием световозвращающих маячков, закрепленных на суставах человека. Сопоставив кинематику и последовательность движения частей тела человека в определенных условиях, можно оценить абсолютные характеристики движения.
Полученные результаты позволят снизить уровень травматизма при обслуживании машин и оборудования путем обоснования зон опасных движений человека, а также применения специальных устройств для контроля человека, находящего в опасной зоне. Обоснование величины зон опасных движений человека и опасных зон оборудования позволит регламентировать действия человека в аварийных ситуациях и избежать тяжелых последствий.
ОБОСНОВАНИЕ ВЕЛИЧИНЫ ЗОН ОПАСНЫХ ДВИЖЕНИЙ ЧЕЛОВЕКА И ОПАСНЫХ ЗОН ОБОРУДОВАНИЯ
Zarubin I.V., the engineer of the department "BC" VPO "Ryazan State University Agriculture technology", Russia, Ryazan
Список литературы Обоснование величины зон опасных движений человека и опасных зон оборудования
- Зациорский В. М. Биомеханика двигательного аппарата человека/В.М. Зациорский, А.С. Арунин, В.Н. Селуянов//М.: Физкультура и спорт, 1981.-143с.,
- Кадочников А.А. Один на один с врагом. Русская школа рукопашного боя.; Москва: Феникс Серия: Школа самозащиты,-2006 г. 320 с.,
- Костенко М.Ю., Костенко Н.А., Зарубин И.В. Анализ опасных зон оборудования на основе биомеханики человека. Научное сопровождение инновационного развития агропромышленного комплекса: теория, практика, перспективы: Материалы 65-й международной научно-практической конференции 20-21 мая 2014 года. -Рязань: Издательство Рязанского государственного агротехнологического университета, 2014. -Часть 2.
- Гуторкина, И.С. Обеспеченность трудовыми ресурсами сельскохозяйственного производства России/И.С. Гуторкина, А.Б. Мартынушкин//21 век: фундаментальная наука и технологии: материалы V Международной научно-практической конференции 10-11 ноября 2014 г. Том 2. -North Charleston: Create Space, 4900 La Cross Road, USA 29406, 2014. -283 с.
- Лящук, Ю.О. Влияние сельскохозяйственных рисков на деятельность предприятий АПК/Ю.О. Лящук//Материалы II-й международной научно-практической конференции,19 февраля 2013 года. -Т. 1. -Юго-зап. Гос. Ун-т., Курск, 2013. -С. 245-250.
- Риски травматизма, заболеваемости и связанного с ними экономического ущерба в группе компаний «Стройпромсервис» в 2013 г./Ю.О. Лящук, А.С. Таболин//Сборник научных трудов Международной научно-технической конференции «Строительство: тенденции развития и перспективы» (25-26 июня 2014 года)/редкол.: Гладышкин О.А. (отв. ред.); Юго-Зап. гос. ун-т, Курск, 2014. -С. 69-73.
