Обработка сигналов в радиотехнической системе предупреждения о препятствии роботизированного транспортного средства в субтерагерцовом диапазоне частот

Автор: Борисенков А.В., Горячкин О.В., Гусев Н.А.
Журнал: Инфокоммуникационные технологии @ikt-psuti
Рубрика: Технологии телекоммуникаций
Статья в выпуске: 2 т.20, 2022 года.
Бесплатный доступ
В статье рассматриваются особенности реализации радиолокаторов с синтезированием апертуры переднебокового обзора в субтерагерцовом диапазоне частот, предназначенных для реализации системы предупреждения о препятствии для роботизированного транспортного средства. Показано, что вибрации с с.к.о. порядка 1 мм представляют собой существенную проблему для реализации режимов РСА в W-диапазоне. Для преодоления данной проблемы предложено использовать байесовские алгоритмы формирования радиолокационных изображений в условиях априорной неопределенности.
Роботизированное транспортное средство, радиолокатор с синтезированной апертурой, w диапазон частот, вариационный байесовский подход
Короткий адрес: https://sciup.org/140296727
IDR: 140296727 | УДК: 621.37 | DOI: 10.18469/ikt.2022.20.2.03
Signal processing in a robotic vehicle obstacle warning radio system in the subterahertz frequency range
The article describes the features of the implementation of radars with the synthesis of the anterolateral viewing aperture in the subterahertz frequency range, designed to implement an obstacle warning system for a robotic vehicle. It is shown that vibrations with standard deviation systems of about 1 mm representa significant problem for the implementation of SAR modes in the W range. In order to overcome this problem, it is proposed to use Bayesian algorithms for the formation of radar images in conditions of a priori uncertainty.
Текст научной статьи Обработка сигналов в радиотехнической системе предупреждения о препятствии роботизированного транспортного средства в субтерагерцовом диапазоне частот
Значительный рост применения радиосистем субтерагерцового диапазона ожидается при реализации беспилотных (роботизированных) транспортных средств. Современные гарантии безопасности предъявляют новые требования к бортовым системам предотвращения столкновений и круиз‐контроля, в частности: адаптивный круиз‐контроль, помощь при смене полосы движения, предупреждение о перекрестном движении, контроль слепого угла, помощь при парковке и обнаружение препятствий в целом.
Автомобильные радары привлекают интерес разработчиков роботизированных транспортных средств тем, что в отличие от оптических систем не подвержены влиянию таких факторов, как снег, туман, время суток.
Требования по высокой разрешающей способности обуславливают использование в этих системах K (24 ГГц) и W (77–81 ГГц) диапазонов частот. Однако задача построения радиолокаци- онных изображений методом синтезированной апертуры требует разработки и развертывания высокочастотного РСА на платформах, которые стабильны с точностью до доли длины волны или хорошо контролируются в режиме реального времени так, чтобы можно было определить местоположение приемопередатчика с высокой точностью.
В [1–3] был достигнут некоторый прогресс в разработке высокочастотных РСА, включая некоторые демонстрации, подтверждающие данную концепцию. Например, в [1] реализован радар с синтезированной апертурой, перемещающийся на рельсе, в W-диапазоне (75–110 ГГц) и терагер-цовом (ТГц) диапазоне (325–500 ГГц).
В работе [4] рассматривается применение технологии на основе радаров, которые предоставляют водителям информацию об изгибах дороги в условиях, когда оптические датчики не могут работать.
В статье [5] представлен MIMO радар с одновременной передачей ортогональных сигналов,
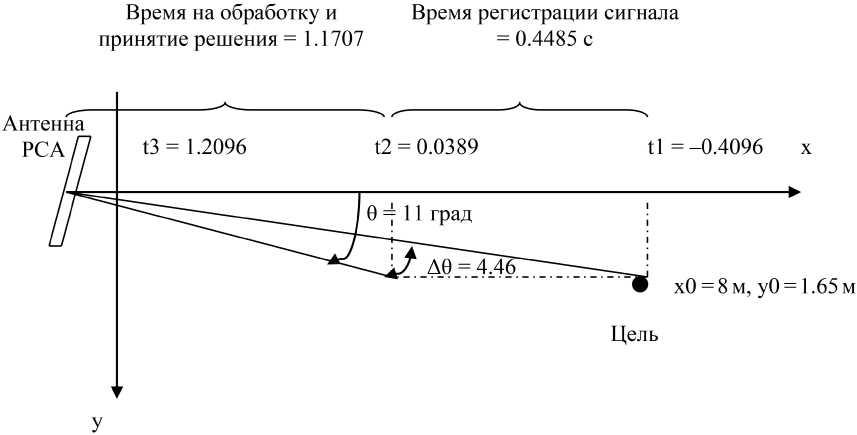
Рисунок 1. Геометрия сцены для моделирования характеристик РСА для беспилотного транспортного средства
описанных в [6]. Радар работает в W-диапазоне (93,5–94,5 ГГц, полоса сигнала 1 ГГц) и использует частотно-модулированные непрерывные волновые (FMCW) сигналы.
Современные системы помощи водителю и автоматизированные приложения для вождения используют радарные датчики для различных функций безопасности. Высокое разрешение по азимуту с использованием радара может облегчить эти приложения (например, парковка). В статье [7] обсуждается встроенная система реального времени, реализующая концепцию РСА, подходящая для автомобильных приложений.
В данной статье мы рассмотрим особенности реализации авторадара передне- или заднебокового обзора с синтезированной апертурой для предотвращения столкновений с препятствием.
Технические характеристики автомобильного радара переднебокового обзора
В разделе рассматриваются особенности реализации радара бокового обзора для обеспечения безопасности автомобиля в следующих ситуациях:
-
1) транспортное средство приближается к месту для парковки, режим идентификации мобильной цели используется для заблаговременного обнаружения транспортных средств в зоне парковки;
-
2) транспортное средство приближается к перекрестку на низкой скорости, режим идентификации мобильной цели используется для заблаговременного обнаружения транспортных средств в зоне безопасности, чтобы избежать столкнове-
- ния, вызванного проездом транспортного средства через перекресток;
-
3) транспортное средство приближается к наземному препятствию впереди транспортного средства на средней скорости, в том числе отходы тротуара.
Радар бокового обзора должен контролировать пространство с боку от транспортного средства в том числе с упреждением, т. е. в режиме переднего или заднего бокового обзора, обеспечивая разрешающую способность порядка нескольких сантиметров.
Для реализации подобных задач может быть использован автомобильный РСА со следующими ориентировочными параметрами:
-
1) Несущая частота = 77 ГГц; 2) Полоса пропускания = 1 ГГц; 3) Разрешение по дальности = 15 см; 4) Разрешение по азимуту (в режиме бокового обзора) = 2,5 см; Разрешение по азимуту (в режиме прямого обзора) = 25 см; 5) В режиме бокового обзора статическое транспортное средство на расстоянии от 1,5 м до 2,5 м д.б. обнаружено с вероятностью обнаружения 0,9 и вероятностью ложной тревоги 0,1; 6) В режиме прямой стороны наземное препятствие д.б. обнаружено в диапазоне более 6–7 метров с вероятностью обнаружения 0,9 и вероятностью ложной тревоги 0,01.
На рисунке 1 показана сцена, для которой проводится математическое моделирование РСА.
На рисунках 2 и 3 показаны радиолокационные изображения точечной цели в режиме бокового и переднебокового обзора.
Из этих рисунков видно, что азимутальное разрешение в режиме переднебокового обзора резко уменьшается при приближении угла визи-
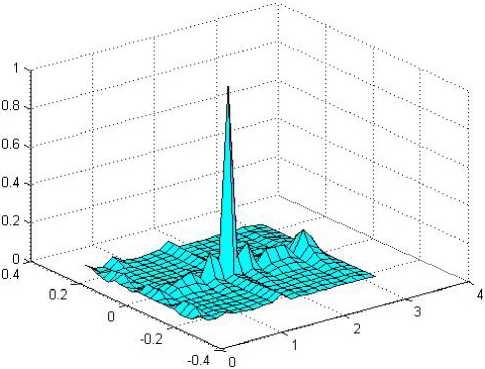
Рисунок 2. Радиолокационное изображение точечной цели РСА в режиме бокового обзора, координаты цели x0 = 0 м, y0 = 1,65 м
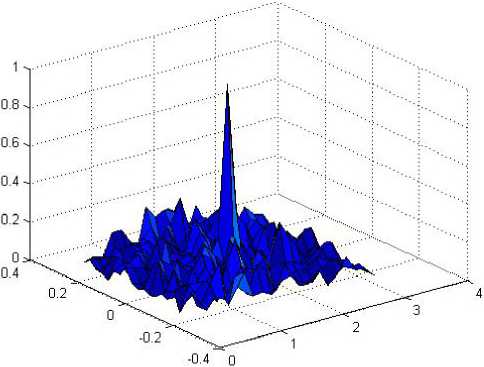
Рисунок 5. Радиолокационное изображение точечной цели РСА в режиме бокового обзора, координаты цели x0 = 0 м, y0 = 1,65 м, с.к.о. вибраций σ = 0,0004
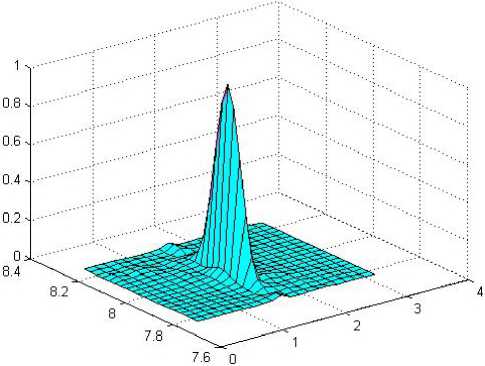
Рисунок 3. Радиолокационное изображение точечной цели РСА в режиме бокового обзора, координаты цели x0 = 8 м, y0 = 1,65 м
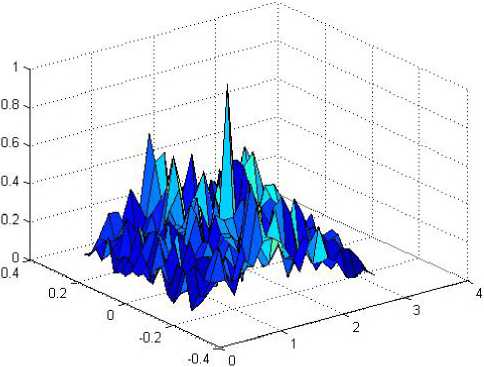
Рисунок 6. Радиолокационное изображение точечной цели РСА в режиме бокового обзора, координаты цели x0 = 0 м, y0 = 1,65 м, с.к.о. вибраций σ = 0,0006
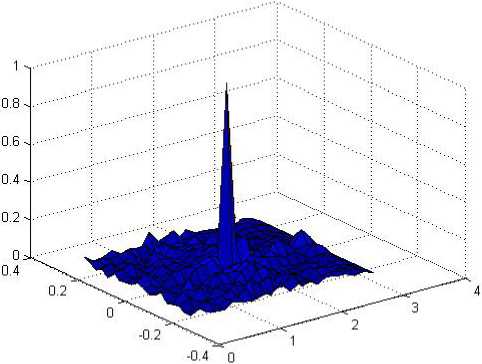
Рисунок 4. Радиолокационное изображение точечной цели РСА в режиме бокового обзора, координаты цели x0 = 0 м, y0 = 1,65 м, с.к.о. вибраций σ = 0.0002
рования тетта к нулю. Поэтому в режиме бокового обзора должно быть заложено существенно большое значение, в нашем случае это 2,5 см.
На работу автомобильных РСА субтерагерцо-вых диапазонов оказывает значительное влияние нестабильность траектории носителя. В рассматриваемом случае это случайные отклонения траектории фазового центра антенны от расчетной модели, возникающие вследствие вибрации автомобиля.
На рисунках 3–6 показано влияние данных вибраций на вид функции неопределенности РСА. Как видно из представленных результатов моделирования, вибрации с с.к.о. порядка 1 мм уже представляют собой существенную проблему для реализации РСА в W-диапазоне.
Обработка сигналов в радиотехнической системе предупреждения о препятствии
Рассмотрим далее некоторые возможные пути преодоления описанных проблем, основанные на методах обработки сигналов, опубликованных в [8–10].
Сигнал, отражённый от цели с координатами r , можно записать в виде
5 (t)_ J G(t, r)5o (t -t(t, r))£(r) dr + П (t), (1) D где ^(r) - коэффициент переотражения элемента поверхности с координатами r; 50 (t) - комплексная огибающая зондирующего сигнала передатчика; n (t) - комплексный гауссовский шум канала приёма (далее комплексные величины обозначаются символом без точки); D – область переотражения; G (t, r) - вещественная весовая функция, учитывающая влияние диаграмм направленности приёмных и передающих антенн; т(t, r) - задержка сигнала, отраженного от цели с координатами r, в момент времени t.
Точное знание т ( t , r ) является условием для формирования радиолокационного изображения. Вибрации носителя и погрешности навигационного обеспечения приводят к неопределенности в части т ( t , r ) . Представим
т ( t , r ) = Т о ( t , r ) + S ( t , r ) , (2)
где т 0 ( t , r ) - известная часть, S ( t , r ) - неизвестная часть, подлежащая оценке в процессе формирования радиолокационного изображения и представляющая собой флуктуации времени задержки сигнала, например, вследствие вибраций носителя.
В последние годы в задачах слепой обработки изображений стал доминирующим вариационный байесовский подход. Слепое восстановление изображений – это неопределенная нелинейная обратная задача, требующая оценки большего числа неизвестных переменных, чем имеющиеся наблюдаемые данные. Чтобы найти значимые решения, важны не только предварительная информация о неизвестных, но и надежный подход к их оценке.
В задаче слепого восстановления радиолокационных изображений можно использовать вариационный байесовский подход (ВБА), рассматривая в качестве неизвестных случайных параметров истинное радиолокационное изображение, функцию фазовых флуктуаций S( r, t) и параметры априорных распределений 0 (в рассматриваемом случае этот вектор может содержать в качестве компонент дисперсию аддитивного шума, параметры распределения комплексного коэффициента отражения, дисперсию флуктуаций задержки S(t, r)).
Пусть апостериорное распределение неизвестных параметров задачи имеет вид p (^{ r), S( r, t), 0| 5 (t ))_
_ p ( 5 ( t )| ^ ( r ) , S ( r , t ) , 0 )
•
p ( 5 ( t ) )
• p ( ^ ( r )| 0 ) p ( s ( r , t )| 0 ) p ( 0 ) .
Символом p (∙) – обозначено вероятностное распределение компонент внутри скобок.
Обычно проинтегрировать распределение вида (3) для получения МАВ оценок (оценок максимума апостериорной информации) неиз- вестных параметров довольно затруднительно. В рамках ВБА нужно подобрать к (3) некоторое удобное распределение, решив следующую вариационную задачу [9]
q ( ^( r ) , S( r , t ) , 0 ) _ arg max c kl ( q\\p ) ,
q ( S ( ' ) , ( ' , t ) , 0 )
q _ q(^(r),S(r,t),0), p _ p(^(r), 5(r,t),0|s(t)),
q(^(r),S(r,t),0)_ q(^(r))q(S(r,t))q(0), соответствующие распределения, определяемые в процессе решения вариационной задачи.
В соответствии с [10] итерационный процесс оценки искомых распределений организуется следующим образом:
-
1) формируются начальные приближения распределений параметров q 1 ( S ( r , t ) ) q 1 ( 0 ) ;
-
2) находится k -е приближение оценки аппроксимирующего апостериорного распределения для матрицы коэффициентов переотражений
qk ( ^ ( r ) )_ argmax c kl ( q^p ) , q (4 r ) )
q _ q ( ^ ( r ) ) qk ( s ( r , t ) ) qk ( 0 ) , (5)
p _ p ( ^ ( r ) , § ( r , t ) , 0| s ( t ) ) .
-
3) Находятся ( k +1)-е приближения аппроксимирующих распределений параметров
qk+1 (s( r, t))_ argmq^ 9x ckl (q||p), q _ qk (^(r)) q (s( r, t)) qk (0), (6)
p _ p ( ^ ( r ) , § ( r , t ) , 0| s ( t ) ) .
qk + 1 ( 0 ) _ argmax c kl ( q^p ) ,
q ( 0 )
q _ qk ( ^ ( r ) ) qk ( s ( r , t ) ) q ( 0 ) , (7)
p = p ( ^ ( r ) , 8 ( r , t ) , ®| s ( t ) ) .
Процесс останавливается после стабилизации относительной погрешности. Соответствующие оценки неизвестных информационных параме- тров и параметров находятся в виде
£ ( r ) = arginax q ( ^ ( r ) ) ,
8 ( r , t ) = arg max (7 ( 8 ( r , t ) ) ,
8 ( r , t )
0 = arg max q ( 0 ) .
Таким образом в данном разделе представлены байесовские алгоритмы формирования радиолокационных изображений в системах с синтезированной апертурой в условиях априорной неопределенности. Показано применение вариационного байесовского подхода к построению алгоритмов синтеза апертуры в автородарах при наличии вибраций.
Заключение
Таким образом проведенное имитационное математическое моделирование показало, что на работу автомобильных радаров с синтезированной апертурой субтерагерцовых диапазонов значительное влияние оказывает нестабильность траектории носителя, вызванная вибрацией. Для преодоления данной проблемы предложено использовать байесовские алгоритмы формирования радиолокационных изображений в условиях априорной неопределенности.
Список литературы Обработка сигналов в радиотехнической системе предупреждения о препятствии роботизированного транспортного средства в субтерагерцовом диапазоне частот
- Richard J.T., Everitt H.O. Millimeter wave and terahertz synthetic aperture radar for locating metallic scatterers embedded in scattering media // IEEE Transactions on Terahertz Science and Technology. 2017. Vol. 7, no. 6. P. 732-740. DOI: https://doi.org/10.1109/ TTHZ.2017.2757441.
- Review of terahertz tomography techniques / J.P. Guillet [et al.] // Journal of Infrared, MilMillimeter, and Terahertz Waves. 2014. Vol. 35. P. 382-411.
- Terahertz imaging systems with aperture synthesis techniques / V. Krozer [et al.] // IEEE Trans. Microw. Theory Techn. 2010. Vol. 58, no. 7. P. 2027-2039.
- Yi X., Wong H. Wideband Substrate Integrated Waveguide Fed Open Slot Antenna Array // IEEE Access. 2020. Vol. 8. P. 74167-74174. DOI: https://doi.org/10.1109/ACCESS.2020.2988053.
- Application of W-band FMCW radar for road curvature estimation in poor visibility conditions / T. Lee [et al.] // IEEE Sensors Journal. 2018. Vol. 18, no. 13. P. 5300-5312. DOI: https://doi.org/10.1109/JSEN.2018.2837875.
- W-band MIMO FMCW radar system with simultaneous transmission of orthogonal waveforms for high-resolution imaging / S.Y. Jeon [et al.] // IEEE Transactions on Microwave Theory and Techniques. 2018. Vol. 66, no. 11. P. 5051-5064. DOI: https://doi.org/10.1109/TMTT.2018.2867003.
- Real-time synthetic aperture radar for automotive embedded systems / F. Fembacher [et al.] // 15th European Radar Conference (EuRAD). 2018. P. 517-520. DOI: https://doi.org/10.23919/EuRAD.2018.8546620.
- Оптимальные методы обработки сигналов в системах радиотехники и связи / Ю.В. Алышев [и др.]. Самара: СамНЦ РАН, 2018. 344 с.
- Molina R., Mateos J., Katsaggelos A.K. Blind deconvolution using a variational approach to parameter, image, and blur estimation // IEEE Transactions on Image Processing. 2006. Vol. 15, no. 12. P. 3715-3727.
- Likas A.C., Galatsanos N.P. A variational approach for Bayesian blind image deconvolution // IEEE Transactions on Signal Processing. 2004. Vol. 52. P. 2222-2233.
