Образовательная, научная и прикладная составляющие мехатроники

Автор: Смирнов Юрий Сергеевич, Юрасова Екатерина Валерьевна, Кацай Дмитрий Алексеевич, Никитин Иван Сергеевич
Статья в выпуске: 1 т.14, 2014 года.
Бесплатный доступ
Показано формирование мехатроники в качестве фундаментальной технической науки, представляющей компьютерную парадигму технической кибернетики. Рассмотрены образовательная, научная и прикладная составляющие мехатроники. Предложены логотипы, раскрывающие структуру электромехатронного преобразователя (ЭМТП) и мехатронной системы (МС). Приведен пример МС, в котором используются передовые технологии управления.
Парадигма, мехатроника, синергия, мехатронная система, электромехатронный преобразователь
Короткий адрес: https://sciup.org/147154955
IDR: 147154955 | УДК: 621.856.8
Educational, scientific and applied components of mechatronics
Traced the formation of mechatronics as a fundamental technical science, representing a computer paradigm Technical Cybernetics. Educational, scientific and applied mechatronics components are considered. Proposed logos, revealing the structure of electromehatronics converters (EMTC) and mechatronic systems (MS). The application of MS in which advanced control technology used is demonstrated.
Текст научной статьи Образовательная, научная и прикладная составляющие мехатроники
Формирование нового научно-технического направления
Становление мехатроники совпадает с увяданием в 70-х годах технической кибернетики (ТК) и расцветом информатики в 80-х годах прошлого века. Итоги развития ТК в СССР подведены изданием в 1967–76 гг.под редакцией В.В. Солодовникова семитомной уникальной серии инженерных монографий «Техническая кибернетика», удостоенных Государственной Премии СССР. Содержание и доступность издания сделали его настольной книгой для специалистов.
Основным содержанием развития человечества на современном этапе считается переход от индустриального к информационному обществу, в котором определяющая роль принадлежит информационным технологиям. Однако следует признать, что информационные технологии, являясь катализатором развития и прогресса, представляют собой лишь оболочку, которая при решении конкретных практических задач приобретает предметное наполнение. В последнее десятилетие в инженерной практике в качестве такого предметного наполнителя выступают мехатронные системы (МС) и технологии, которые призваны определить облик техносферы XXI века [1].
Рассматривая эволюцию мехатроники, следует согласиться с мнением о том, что кибернетика стала материнской наукой для информатики и прародительницей мехатроники. Ее появление обусловлено требованиями практики: появление и резкий подъем производства микропроцессорных систем и больших интегральных схем существенно расширили возможности электронных устройств управления и позволили при малых габаритных размерах и высокой надежности придать им такие новые свойства, как функциональная гибкость и пеpестpаиваемость в соответствии с требованиями к управляемому механическому процессу.
Результативность развития мехатроники в XX веке подтверждает S. Yaskawa (С. Яскава), который в докладе «Future Trend in Intelligent Mechatronics Systems» on 7th Mechatronics Forum, Sept. 2000 in Atlanta, USA заявил: «Эта концепция увеличила производительность в таких отраслях, как автомобилестроение, компьютеры, средства связи и дала возможность глобальному развитию. Это привело к эффективности массового производства. Оно было сконцентрировано на получение материальной выгоды. Теперь мы должны взять в свое распоряжение концепцию окружающей среды – полный жизненный цикл и «стряхнуть пыль» – наше дело. Поскольку мы движемся из эры «закрытого сбалансированного общества» к «открытому несбалансированному обществу», управление и глобальная стандартизация необходимы».
Эти рекомендации остаются весьма актуальными для региона Южного Урала, где придется тщательно «стряхнуть пыль» и уделить достаточное внимание совершенствованию инновационных разработок [2], направленных на улучшение экологической ситуации в регионе. Предложенные варианты построения МС позволяют ослабить влияние радиации на микроэлектронную часть системы. Это достигается путем ее удаления на значительное расстояние от электромеханической части и совершенствования интерфейса, предусматривающего передачу информации по силовым цепям.
Образовательная составляющая мехатроники
Первое определение мехатроники в России было дано в 1995 г. в Государственном стандарте РФ по специальности 07.18: «Мехатроника – это новая область науки и техники, посвященная созданию и эксплуатации машин и систем с компьютерным управлением движения, которая базируется на знаниях в области механики, электроники и микропроцессорной техники, информатики и компьютерного управления движением машин и агрегатов».
Структура (рис. 1, а) раскрывает триединую сущность МС, представляющих глубокую взаимосвязь механических, электронных и компьютерных элементов, системная интеграция которых является необходимым условием их построения.

Рис. 1. Структуры мехатроники и электромехатроники

Однако структура (см. рис. 1, а) и определение сужают область применения МС, ориентированных на компьютерное управление движением, выводя за пределы структуры устройства, преобразующие аналоговую информацию, превалирующую в окружающем мире.
Известен вариант представления электромехатроники как единства трех составляющих (рис. 1, б): электропривода ( ЭП ), передаточного механизма ( ПМ ) и устройства управления ( УУ ). При этом, в соответствии с принципом Порето, формируются области: 1 – электромеханики, 2 – автоматики, 3 – автоматизированного электропривода и 4 – ядро направления, то есть электро-мехатроника. К сожалению, в этой структуре не нашла отражения информатика, которая является неологизмом слов «ИНФОРмация» и «автоМАТИКА», появившимся в 1962 г. во Франции для обозначения информационной автоматики или автоматизации обработки информации. В англоязычной литературе термину «Информатика» соответствует синоним «computer science», то есть компьютерные науки [3].
Целесообразность синергетического объединения устройств различной природы с интеллектуальным управлением их движением нашло отражение в действовавшем с 2000 г. образовательном стандарте высшего профессионального образования Министерства образования и науки РФ по направлению подготовки дипломированного специалиста 652000: «Мехатроника – это область науки и техники, основанная на синергетическом объединении узлов точной механики с электронными, электротехническими и компьютерными компонентами, обеспечивающая проектирование и производство качественно новых модулей, систем и машин с интеллектуальным управлением их функциональными движениями».
Нормативные документы, действующие в настоящее время:
-
1. Определение мехатроники из ФГОС ВПО РФ по направлению подготовки 221000 «Меха-троника и робототехника», утвержденного для бакалавриата в ноябре 2009 г., а для магистратуры – в декабре 2009 г.: «Мехатроника – область науки и техники, основанная на системном объединении узлов точной механики, датчиков состояния внешней среды и самого объекта, источников энергии, исполнительных механизмов, усилителей, вычислительных устройств (ЭВМ и микропроцессоры).
-
2. В формуле ВАК по научн ой специальности 05.02.05 «Роботы, мехатро ника и робототехн и ческие системы» дается определение: «Мехатроника как отдельная область науки и техники ос нована на синергетическом объе динении узлов точной механики с электронн ыми, электротехн и ческими и компьютерными ком понентами, обеспечивающими проектирова ние и производство качественно новых модулей, систем и машин с интеллектуальн ым управлением их функциональными движениями».
Мехатронная система – единый комплекс электромеханических, электрогидравлических, электронных элементов и средств вычислительной техники, между которыми осуществляется постоянный динамически меняющийся обмен энергией и информацией, объединенный общей системой автоматического управления, обладающей элементами искусственного интеллекта. Предмет мехатроники – компьютерное управление механическим движением».
Из представленных официа льных определений следует, что МС являет ся комплексом ус т ройств различной природы, ос уществляющих одновременно преобразован ие вида энергии и форм информации. Поскольку обе эти задачи эф фективно решаются на основе использования в качестве носителя электроэнерг ии, то базовым элементом в таких МС стано вится электромех а-тронный или электромеханотронный преобразователь (ЭМТП).
На рис. 2, а представлен ло готип ЭМТП, раскрывающий его структуру и функции его составляющих. Логотип (см. рис. 2, а) учитывает непременное наличие интеллектуальных способ ностей и синергетических возмо жностей, которые служат необходимыми и достаточными усл о виями к отнесению устройства к мехатронике.

а)

б)
Рис. 2. Логотипы ЭМТП и МС
При этом следует учитывать, что обязательным является:
-
1. Синергетический характер интеграции, который определяется тем, чт о составляющие е е- части не просто дополняют друг друга, а создают устройство, обладающее к ачественно новыми свойст вами и возможностями. В место термина «синергетическое» за рубежо м используются п о нятия «органичное» или «системное» [4].
-
2. Мехатроника изучает нов ый методологический подход («парадигму») в построении мех а низмов с качественно новыми характеристиками. Непре менным свойством МС является интеллект.
При этом преобразовании и нформации в перемещение не зависит от ее формы: аналоговая или цифровая, и вида преобра зуемой энергии: электрическая, тепловая, г идравлическая или пневматическая.
С учетом представленных выше современных мнений в теоретическом [1, 3, 5] и прикладном секторах [6, 7] логотип МС мож но отобразить в варианте, представленном на рис. 2, б. В нем ме ханика объединяет все ее разнов идности; электроника помимо аналоговых и аналого -цифровых электронных устройств, включа ет силовую полупроводниковую технику в интегральном и м о дульном исполнении; к информа тике относятся цифровые и сигнальные МПС , програм мируемые МК; включает в себя кинестетич еские и генераторные первичные преобразов атели на любой ф и зической основе и стандартные интегральные интерфейсы.
Мехатронная система являет ся замкнутой системой автоматического упр авления (САУ), о бладающей адаптацией и искусст венным интеллектом. При этом структурное, алгоритмическое и информационное обеспечение С АУ предусматривает получение в процессе функционирования синергетического эффекта, проя вляющегося в повышении эффективности МС или ее важных показателей.
Место мехатроники в современной науке
Лидеры отечественной теоретической мехатроники [1, 3] провели парадигмальный анализ развития, семантический анализ существующих определений, проследили генезис мехатроники. Они пришли к выводу, что до сих пор не сформирована научно обоснованная базовая терминология мехатpоники, и на сегодняшний день общепринятого однозначного ее определения не существует.
В первой монографии по мехатpонике [8] подчеркивается, что «одной из ключевых проблем мехатpоники является управление механическим движением с помощью компьютера».
В отечественной литературе в качестве «рабочего» используется упомянутое ранее определение, сформулированное в ГОС ВПО РФ по направлению 652000 «Мехатроника и робототехника».
В зарубежной литературе доминирует определение из знаменитой Оксфордской энциклопедии «Oxford Illustrated Encyclopedia»: «Мехатроника – японский термин для описания технологий, возникающих на стыке электротехники, машиностроения и программного обеспечения. Включает проектирование, производство и изучает функционирование машин с «разумным» поведением, т. е. действующих по заданной программе, их связи с другими материалами (искусственный интеллект, измерительное оборудование, системы управления)».
Очевидно, что приведенные определения не отвечают основным критериям научно-технических терминов: однозначности, точности, четкости и краткости. Так, например, первое определение не отражает двуединую научно-техническую целостность мехатpоники: оно рассматривает лишь ее технико-технологическую направленность и не учитывает ее естественно-научную направленность, связанную с производством новых знаний и реализацией объяснительной функции. Безусловно, что техническая наука, призванная обслуживать технику и технологии, является, прежде всего, наукой.
С методологической точки зрения важно иметь в виду, что определение любой науки всегда ограничено и не может вобрать в себя всего богатства даже основных ее черт, что связано с многогранностью ее функций, возможностей, форм и методов. В связи с этим выдвижение различных вариантов определения позволяет глубже и с разных сторон осветить задачи науки, более полно осмыслить ее место в системе научного знания.
Одним из универсальных гносеологических инструментов раскрытия эволюции мехатроники является парадигманальный подход, означающий некоторую систему общепринятых взглядов, признанных научным сообществом в рамках устоявшейся научной традиции в определенный период времени.
Однако следует согласиться с высказыванием одного из патриархов отечественной кибернетики Б.Н. Петрова о том, что наличие многих определений – результат отсутствия «не только единого, а хотя бы более или менее определенного мнения о предмете науки», что характерно не только для зарубежных определений мехатроники [3].
Совершенствование МС предусматривает ее электронизацию путем уменьшения механической компоненты, что отражено на рис. 2, б.
Анализируя достижения в области совершенствования существующих и создания новых МС путем «электронизации» процессов управления, можно констатировать, что происходит расширение классической механической парадигмы мехатроники, связанное с переходом от компьютерного управления механическими процессами к компьютерному управлению физическими процессами. Такое расширение отражает эволюцию взаимосвязей различных форм движущейся материи – переход от наиболее простых, механических, к более сложным, физическим, формам движения [1].
Развитие мехатроники, как междисциплинарного научно-технического направления помимо очевидных технико-технологических сложностей, ставит и целый ряд новых организационноэкономических проблем. Их решение зачастую требует преодоления сложившихся на предприятии традиций в управлении и амбиций менеджеров среднего звена, привыкших решать только свои узкопрофильные задачи. Именно поэтому средние и малые предприятия, которые могут легко и гибко варьировать свою структуру, оказываются более подготовленными к переходу к производству МС.
Это способствует развитию университетской науки и иллюстрируется на примере разработки, выполненной на кафедре «Приборостроение» ЮУрГУ (НИУ). Она представляет из себя исследование, связанное с разработкой МС для нанесения асфальтобетонного покрытия.
Прикладная мехатроника в дорожном строительстве
В [9, 10] представлена МС строительстваасфальтобетонного покрытиядорог, структура кото-ройсформирована с применением традиционного структурно-параметрического синтеза регуляторов локальных САУ в детерминированной постановке.
В настоящее время при создании подобных МС должны использоваться передовые технологии управления, обеспечивающие интеллектуальные свойства и существенный синергетический эффект. Применение в этих МС систем прямого привода и высоких уровней информационного обеспечения управления рабочим механизмом позволяет создать агрегаты с повышенными функциональными возможностями и продолжительным сроком безаварийной работы.
В работе [11] представлена математическая модель автоматизированной системы управления мобильным агрегатом (МА) повышенной энергоэффективности. На основе этого МА предлагается построить более эффективную МС. Для этого МА следует придать вышеуказанные интеллектуальные и информационные свойства, приводящие к возникновению синергетического эффекта.
Рабочим органом МА является ротационный фрезерный элемент, конструкция которого защищена патентом на полезную модель [12]. Энергоэффективность МА обусловлена конструкцией рабочего органа – резание твердого асфальтобетонного или ледяного покрытия происходит при малых усилиях в малых зонах поверхности и глубины.
С целью увеличения глубины и площади разрушаемого в процессе резания материала усложнен закон движения режущих элементов и увеличено их количество. За один цикл углового движения барабана, несущего на себе фрезы-сателлиты, снимается микрослой материала. Повторение операции снятия микрослоя на большой угловой скорости вращения барабана приводит к высокой производительности фрезерного агрегата на макроуровне размеров дорожного покрытия.
Дорожные испытания малогабаритного агрегата, имеющего вес менее 40 кг, на старом асфальтобетонном покрытии показали максимальную производительность порядка 2,5 м3·ч–1. Однако из-за ручного режима управления агрегатом величина неровности обработанной поверхности составила несколько десятков процентов относительно номинальной глубины обработки в 20 мм. Для устранения неровности обрабатываемого слоя необходимо вводить в агрегат САУ глубины обрабатываемого слоя материала со свойствами МС.Структурная схема МА с МС представлена на рис. 3.
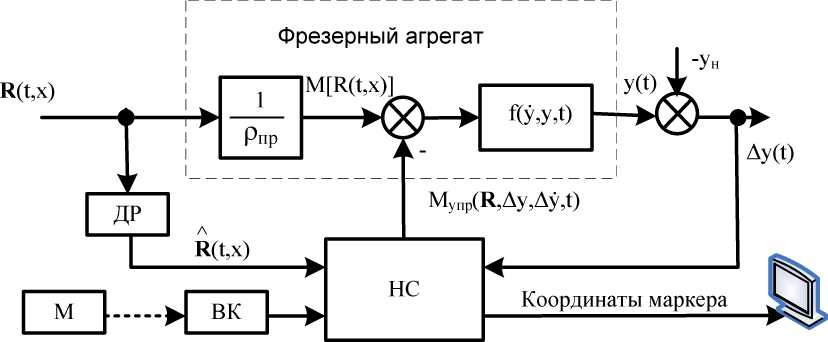
Рис. 3. Структурная схема МА с МС
Интеллектуальная составляющая МС реализована в виде нейронной сети (НС) с функцией формирования управления M упр ( R , Δ у , Δ ẏ , t ) и распознавания маркера. Сама нейронная сеть в этом случае обладает динамическими свойствами, которые получаются путем добавления во входной слой персептрона блоков задержки. Информационная составляющая МС представлена с помощью сенсоров: датчиков реакций (ДР), выдающих измеренное значение реакции барабана R ( t , x ); видеокамеры (ВК), направленной на маркер (М); датчика положения барабана, выдающего сигнал y ( t ). С помощью алгоритмического и программного обеспеченияформируется многослойное отображение инструкций для оператора на фоне отображаемой на мониторе зоны проведения работ.
Синергия, как дополнительный эффект отреализации в МА принципов мехатроники, позволит обрабатывать малогабаритным устройством большие объемы асфальтобетонного покрытия с высоким качеством и минимальными затратами на разметку зоны.
Заключение
-
1. Зарождение мехатpоники как области научно-технического знания и инженерной деятельности приходится на середину 1980-х годов. Результативность ее развития впечатляет и актуальна для улучшения экологической ситуации в регионе Южного Урала.
-
2. С конца80-х годов XX века мехатроника получила статус самостоятельной фундаментальной технической науки, представляющей собой компьютерную парадигму развития (ТК) [1].
-
3. Образовательное направление «Мехатроника» находится в стадии развития, поэтому ее определение и базовая терминология еще до конца не сформированы, что открывает широкие возможности для плодотворного участия ученых и инженерных кадров в этом процессе.
-
4. Предложены логотипы ЭМТП и МС, раскрывающие структуру и функции базовых элементов мехатронной техники.
-
5. Существует, требующая первоочередного решения, задача по подготовке научных и инженерных кадров, способных создавать МС, отвечающие перспективным требованиям, с учетом теоретических положений мехатроники [1, 3–5] и тенденций развития ее компонентов [6, 10–13].
-
6. Первые шаги в этом направлении сделаны в ЮУрГУ (НИУ): в 2013 году произведен набор студентов по направлению подготовки бакалавров «Мехатроника и робототехника». Поставлен курс «Введение в мехатронику», готовится курс «Мехатронные системы» и первая часть монографии «Электромехатронные преобразователи», посвященная конвертации вида энергии.
-
7. Для разграничения функций мехатроники следует выделить два основных сегмента: теоретическую мехатронику – область, связанную с изучением ее теоретических основ, и прикладную мехатронику – область, связанную с разработкой ее технических средств и методов их применения.
-
8. Существенное значение для обустройства нашего существования в техносфере XXI века имеют работы, связанные с разработкой и исследованием МС для строительства дорог с асфальтобетонным покрытием.
-
9. Мехатронные технологии оказывают и будут еще больше оказывать влияние на социальные условия жизни населения, что связано как с интеллектуализацией условий труда и быта, так и повышением качества и комфортности транспортных магистралей.
Список литературы Образовательная, научная и прикладная составляющие мехатроники
- Теряев, Е.Д. Мехатроника как компьютерная парадигма развития технической кибернетики/Е.Д. Теряев, Н.Б. Филимонов, К.В. Петрин//Мехатроника, автоматизация, управление. -2009. -№ 6. -С. 2-10.
- Smirnov, Y.S. Robototechnical Complecses for Radioactive Accidents Aftermath Removel/Y.S. Smirnov//Book of abstracts VIII International Symposium «Ural Atomic, Ural Industrial». -Екатеринбург: Уральское отделение РАН, 2000. -P. 37-40.
- Кориков, А.М. О развитии понятия «мехатроника»/Ю.М. Осипов//Доклады ТУСУРа. -2010. -№ 1 (21). -Ч. 2. -С. 199-202.
- Подураев, Ю.С. Мехатроника: основы, методы, применение/Ю.С. Подураев. -М.: Машиностроение, 2006. -256 с.
- Шалобаев, Е.В. Теоретические и практические проблемы развития мехатроники/Е.В. Шалобаев//Современные технологии: сб. науч. ст. -СПб.: СПбГУ ИТМО (ТУ), 2001. -С. 46-67.
- Домрачев, В.Г. Цифроаналоговые системы позиционирования/В.Г. Домрачев, Ю.С. Смирнов. -М.: Энергоатомиздат, 1990. -240 с.
- Осипов, Ю.М. К вопросу о развитии понятия «мехатроника»/Ю.М. Осипов//Доклады ТУСУРа. -2010. -№ 1 (21). -Ч. 2. -С. 193-198.
- Мехатроника/Т. Исии, И. Симояма, Х. Иноуэ и др.; пер. с яп. С. Масленникова. -М.: Мир, 1988. -318 с.
- Загороднюк, В.Т. Мехатронная система асфальтобетонного покрытия дорог/В.Т. Загороднюк, А.Е. Грошев//Мехатроника, 2001. -№ 8. -С. 28-30.
- Грошев А.Е. Мехатронный комплекс строительства асфальтобетонного покрытия дорог: автореф. дис. … канд. техн. наук: 05.10.2000/Грошев А.Е. -Новочеркасск, 2000. -15 с.
- Кацай, Д.А. Математическая модель автоматизированной системы управления мобильным агрегатом повышенной энергоэффективности//Актуальные проблемы автоматизации и управления: тр. науч.-практ. конф. -Челябинск: Издат. центр ЮУрГУ, 2013. -С. 35-39.
- Пат. 96875 Российская Федерация, МПК8 E01Н 5/12. Устройство для разрушения ледяных и твердых образований на дорожных покрытиях/Д.А. Кацай, И.А. Баранова; заявитель и патентообладатель Юж.-Урал. гос. ун-т. -№ 20100113856/21; заявл. 08.04.2010; опубл. 20.08.2010, Бюл. № 23. -2 с.: ил.
- Смирнов, Ю.С. Аналого-цифровые преобразователи составляющих перемещения на основе электромеханических первичных преобразователей/Ю.С. Смирнов, Т.А. Козина, П.Б. Серебряков//Измерительная техника. -2013. -№ 9. -С. 40-43
