Обзор и классификация методов реализации канала управления БПЛА

Автор: Ваняев Д.А.
Журнал: Инфокоммуникационные технологии @ikt-psuti
Рубрика: Радиопередающие и радиоприемные устройства, телевидение
Статья в выпуске: 1 (89) т.23, 2025 года.
Бесплатный доступ
В статье рассматриваются методы реализации канала управления между наземной станцией управления и беспилотным летательным аппаратом. На основе библиографического метода исследования сформулирована классификация как проводного, так и беспроводного методов. Рассмотрены существующие методы, реализованные в коммерческих системах управления. Проведен сравнительный анализ привязных дронов по критериям: аэродинамическая схема беспилотного летательного аппарата, высота и масса полезной нагрузки, максимальная скорость ветра, выдерживаемая беспилотным летательным аппаратом, время развертывания и свертывания системы задачи, выполняемые беспилотным летательным аппаратом. Проведен сравнительный анализ распространенных систем радиоуправления, представленных компаниями: Frsky, Spektrum, Flysky, Hitec, ELRS. Рассмотрены составляющие радиоканала управления, состоящие из модуляции, кодирования и выбора несущей частоты. Приведены методы реализации канала управления с использованием атмосферных линий связи.
Канал управления, дрон, беспилотный летательный аппарат, управление, радиопередача, наземная станция управления, система управления, привязные дроны, атмосферная линия связи
Короткий адрес: https://sciup.org/140312326
IDR: 140312326 | УДК: 004.031.4 | DOI: 10.18469/ikt.2025.23.1.04
Review and classification of methods for implementing UAV control channel
The article considers methods for implementing control channel between ground control station and unmanned aerial vehicle. Classification methods were formulated based on the bibliographic research method: wired, wireless. Existing methods implemented in commercial control systems are considered. A comparative analysis of tethered drones was carried out according to the following criteria: aerodynamic configuration of an unmanned aerial vehicle, payload height and weight, maximum wind speed unmanned aerial vehicle can withstand, system deployment and disintegration time, and tasks performed by the unmanned aerial vehicle. A comparative analysis of common radio control systems presented by Frsky, Spektrum, Flysky, Hitec and ELRS is carried out. The components of the radio wave control channel, consisting of modulation, coding and carrier frequency selection, are considered. Methods for a control channel implementation using atmospheric communication lines are presented.
Текст научной статьи Обзор и классификация методов реализации канала управления БПЛА
Беспилотные авиационные системы за последнее десятилетие проникли почти во все сферы деятельности человека – от промышленности, до бытовых нужд [1]. Существует большое количество разных дронов, классифицируемых по назначению, размерам, устройству или способу взлета [2]. В работе [3] выделяют следующие основные сферы применения беспилотных авиационных систем (БАС): аэросъемка, проектирование, картографирование, мониторинг, сельское хозяйство, охрана.
Система беспилотного летательного аппарата (БПЛА) состоит из большого количества элементов [4]: полетный контроллер, винтомоторная группа (пропеллер, мотор, регулятор оборотов (ESC)), рама, камера (курсовая, записи), система связи (канал управления, канал телеметрии, канал видеопотока), система питания (аккумулятор, модуль питания (BEC).
Наиболее важным компонентом среди представленных групп является система связи. Она позволяет оператору с помощью наземной станции управления (НСУ) как принимать информацию с дрона (телеметрию, видеопоток, данные с полезной нагрузки), так и передавать команды управления. При этом, как показывают результа- ты СВО, недостаточное внимание к системам связи может привести не только к появлению сбоев в управлении БПЛА, но и к его полной потере [5].
Цель исследования: создание подробной классификации методов реализации канала управления между наземной станцией управления и беспилотным летательным аппаратом.
Задачи исследования:
-
1. Проведение информационного поиска.
-
2. Определение базовых групп методов реализации каналов управления с использованием методов сравнения, анализа, классификации и обобщения.
-
3. Составление классификации методов реализации каналов управления.
Канал управления представляет собой цепочку действий и событий, которые инициируются в ответ на незапрашиваемое событие (прием информационного сигнала с НСУ, содержащей команду), когда система находится в определенном состоянии. Состояния системы в моменте получения новой команды: ожидание команды, выполнение предыдущей команды, выполнение цепочки заранее заданных команд. Канал управления является важной концептуальной сущностью, описывающей, какие процессы запускаются в системе при возникновении незапрашиваемого события в заданном состоянии.

Характеристики канала управления [6]: дальность работы, скорость передачи, пропускная способность, помехоустойчивость, вероятность битовой ошибки, передача данных полезной нагрузки, передача телеметрии.
Система связи состоит из двух уровней (рисунок 1):
-
1. Связь типов: полетный контроллер – приемник (RX) и НСУ-радиопередатчик (RX).
-
2. Связь между передатчиком и приемником (TX).

Рисунок 1. Уровни системы связи
Команды управления можно разделить на 2 группы: для непосредственного управления положением дрона в пространстве, имеющие широкий диапазон (тангаж, крен, газ, рыскание), и вспомогательный тумблер.
Основываясь на официальной технической документации Express Long Range System (ELRS), далее были выделены базовые каналы управления, представленные ниже [7]. ELRS поддерживает четыре 10-битных канала управления, предназначенных для команд тангажа, крена, рыскания и газа. Каждый из этих каналов отправляется при каждой передаче. Он также поддерживает восемь вспомогательных (Aux) каналов, которые обычно используются для переключателей на пульте управления. Предусмотрены два режима работы: нормальный и расширенный. Нормальный режим: 10 бит или 1024 позиции, соответствующие широтно-импульсной модуляции (ШИМ) от 988 мкс до 2012 мкс (1 бит = 1 мкс). Расширенный режим: 10 бит или 1024 позиции, соответствующие ШИМ от 885 мкс до 2115 мкс (1 бит = 1,23046875 мкс).
Таким образом, передача сигнала со стика пульта управления для нормального диапазона осуществляется следующим образом: минимальное значение на стике – 988 мкс, максимальное – 2012 мкс. Это значение имеет дельту 1024, что соответствует 10 битам. RX протокол связывает пульт управления с передатчиком, а также приемник с полетным контроллером дрона. Таким образом, сформированный пакет в пульте однозначно интерпретируется приемником и полетным контроллером в целом.
Так как в БПЛА используются четыре и более каналов управления, помимо основных четырех 10-битных каналов также присутствуют вспомогательные каналы, которые передаются одновре- менно с основными, но имеют меньшую разрядность.
На данный момент используется большое количество разнообразных методов организации канала управления, при помощи спутников, оптоволоконных кабелей, радиосвязи с различными методами модуляции и кодирования. В данной статье основное внимание уделено классификации методов организации канала управления с точки зрения аппаратной, программной и физической реализации.
Классификация реализации канала управления
Классификация по физической среде передачи данных [8]: проводной (оптоволокно, металлические провода), беспроводной (радиоканал, оптический канал или атмосферная линия связи.
В ходе библиографического исследования было выделено четыре различных метода передачи команд.
К наиболее часто используемым методам можно отнести канал на основе радиоволн, при котором основой передающего сигнала является модулированный и закодированный сигнал, передаваемый при помощи электромагнитных радиочастотных волн [9].
Однако, в связи с явными недостатками использования радиоволн, в виду высокого уровня «шума», создаваемого большим количеством иных источников радиоизлучения, имеющих схожую длину волны, возникла необходимость в реализации канала управления с помощью иных методов. Такими методами стали использование оптического воздушного канала или использование проводного канала управления, варианты которого могут быть представлены в классическом металлическом или оптоволоконном исполнении. Существует несколько вариантов исполнения дронов использующих данный метод:
-
1. Привязные дроны с реализацией электропитания винтомоторной группы (ВМГ) с использованием провода.
-
2. Дроны задействующие собственный аккумулятор, при котором оптическое волокно используется только в роли способа передачи команд управления с наземной станции управления на полетный контроллер беспилотника.
Данные способы уже лишены недостатков радиоканала, но имеют собственные. Так, при наличии провода, масса полезной нагрузки, поднимаемой дроном, снижается. Снижается также маневренность и дальность полета, так как провод, прикрепленный к дрону, имеет собственную массу, и при неаккуратном пилотировании возникает вероятность зацепиться за препятствия.
Оптический воздушный канал использует свет в роли несущего сигнала, как и в случае оптоволоконного провода, но физической средой является не стекло, а воздушная среда. Так как провод отсутствует, то и проблема с дополнительной массой решена, но такой канал управления требует прямой видимости между НСУ и дроном, что ограничивает область применения дрона.
Классификация методов реализации канала управления представлена на рисунке 2. Далее кратко представленные методы организации канала управления будут подробно описаны в соответствующих пунктах.
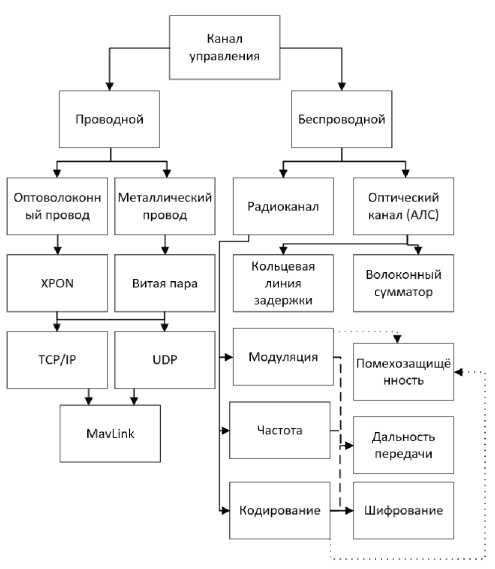
Рисунок 2. Классификация методов реализации канала управления
Реализация канала управления с использованием оптоволоконного и металлического провода
Для некоторых специфичных задач применяются привязные дроны мультикоптерного типа, которые лишены главного недостатка любых дронов – они способны провести в воздухе продолжительное время. По проводу к ним подается питание и двусторонняя связь. Вместо радиосигнала, управление так же выполняется проводным способом [10]. Так как дроны способны находиться в воздухе долгое время, то они хорошо подходят для задач контроля периметров в радиусе оптической видимости, в роли подвижной камеры видеонаблюдения, задачи установки временного ретранслятора для организации связи, в качестве быстро развертываемых метеостанций для проведения исследований и замеров. По сравнению с аэростатами беспилотные воздушные суда (БВC) мультикоптерного типа менее заметны, быстрее разворачиваются и сворачиваются, обладают дополнительной маневренностью, но также имеют и недостатки, главным из которых является повышенная сложность и стоимость самого дрона. С другой стороны, дрон может быть универсален и иметь возможность полета как с проводом, так и с использованием аккумулятора.
Рынок «привязных» дронов представлен большим количеством как зарубежных, так и отечественных производителей. В сравнительном анализе будут участвовать привязные дроны: DPI Umar, страна США (рисунок 3 (а)) [11], Elistair Orion 2.2 TE, страна Франция (рисунок 3 (б)) [12], Sky Sapience Hovermast-100-C, страна Израиль (рисунок 4 (а) [13], Геоскан 401 Привязной, страна Россия (рисунок 4 (б)) [14]. Сравнение дронов представлено в таблице 1 и проводится по следующим критериям: аэродинамическая схема БПЛА, высота и масса полезной нагрузки, максимальная скорость ветра, выдерживаемая БПЛА, время развертывания и свертывания системы, задачи, выполняемые БПЛА.

(а)
(б)
Рисунок 3. Привязные дроны DPI Umar (а), Elistair Orion 2.2 TE (б)

(а) (б)
Рисунок 4. Привязные дроны Sky Sapience Hovermast-100-C (а), Elistair Геоскан 401 Привязной (б)
На основании изученных публикаций [15] и сравнительного анализа были выявлены следующие недостатки:
-
1. Ограничение высоты полета: не более 300 метров.
-
2. Ограничение массы полезной нагрузки вследствие дополнительного веса провода.
-
3. Повышение стоимости, из-за усложнения наземной станции управления.
-
4. Привязной дрон иначе реагирует на внешние возмущения, вследствие наличия натянутого провода. Реакции проявляются в виде смещения не только в сторону, но и по высоте, так как длина провода является фиксированной.
-
5. Усложнение системы передачи данных с дрона на наземную станцию управления.
Устройство привязного дрона рассмотрим на примере [16] (рисунок 5). Назначение системы: создание быстроразвертываемой телекоммуникационной платформы, работающей в роли ретранслятора различных сигналов.

Рисунок 5. Привязной дрон на подвижной НСУ
Система состоит из октокоптера для увеличения подъемной массы и повышения стабильности при различных погодных условиях. Даже при отказе одного или нескольких двигателей ок-токоптер способен безопасно совершить посадку, не повредив полезную нагрузку.
Время полета дрона в данном случае зависит от степени износа деталей и возможности подачи электричества. Для питания винтомоторной группы и электронных компонентов дрона используется медный провод, подключенный к подвижной электростанции на базе грузового автомобиля, или генератору переменного тока мощностью не менее 30 кВт [17]. Управление реализовано с помощью оптоволоконного кабеля. На НСУ и дроне установлены оптоволоконные трансиверы (приемопередатчики), конвертирующие электрические сигналы в световые и передающие их по кабелю. Для обеспечения корректной работы дрон оснащен полетным контроллером с инерциальной (локальной) и глобальной (GPS, Глонасс) системой навигации. Максимальная поднимаемая масса полезной нагрузки равна 30 килограмм, высота подъема дрона составляет 300 метров. Радиус зоны работы полезной нагрузки в виде телекоммуникационной системы составляет 50 километров.
Программная часть на рисунке 2, представлена основными использующимися протоколами в проводном канале управления. Это открытый протокол передачи команд управления MavLink [18] являющийся модулем для Python. Передача информации происходит при помощи пакетов, которые включают: символ начала сообщения, обозначение длины полезной нагрузки, счетчик пакета (необходимый для обнаружения потери части пакета), идентификатор отправляющей системы и компонентов, тип сообщения, полезную нагрузку и контрольную сумму. MavLink может использовать для передачи стек протоколов TCP/IP [19], если необходимо точно определять, отправлен пакет или нет, и UDP, для реализации более простой и быстрой, с точки зрения разработки, системы.
Таблица 1. Сравнение привязных дронов
|
Название |
Схема БПЛА |
Высота и масса полезной нагрузки, м / кг |
Максимальная скорость ветра, м/с |
Время развертывания и свертывания, мин |
Задачи БПЛА |
|
DPI Umar |
октокоптер |
150 / 6 |
15 |
10 |
Связь, видеонаблюдение, мониторинг трафика, качества воздуха |
|
Elistair Orion 2.2 TE |
гексакоптер |
100 / 5 |
12 |
8 |
Видеонаблюдение, мониторинг трафика, |
|
Sky Sapience Hovermast-100-C |
квадрокоптер |
100 / 8 |
15 |
10 |
Связь, видеонаблюдение, мониторинг трафика, качества воздуха |
|
Геоскан 401 Привязной |
квадрокоптер |
100 / 2 |
15 |
8 |
Связь, видеонаблюдение, мониторинг трафика, качества воздуха, прожектор |
Реализация канала управления с использованием радиоканала
Радиоканал связи является самым распространенным способом управления БПЛА [20]. На рынке систем существует большое количество предложений, различающихся по стоимости, размерам, сферам применения и прочим характеристикам канала управления, указанным во введении.
Для сравнения систем радиоуправления были выбраны наиболее распространенные решения: протоколы D8, D16, LR12 от Frsky; протоколы DSM, DSM2, DSMX от Spektrum; протоколы AFHDS и AFHDS 2A от Flysky; протокол A-FHSS от Hitec; протокол FASST от Futaba; протокол Express Long-Range System (ELRS).
В таблице 2 приведена сравнительная характеристика перечисленных выше технологий.
Основные характеристики радиоканала управления представлены на рисунке 2.
В общем виде, модуляция – процесс изменения параметров несущего сигнала в соответствии с информационном сигналом. Модуляция может быть аналоговой, цифровой (манипуляция) и импульсной.
Классификация методов модуляции на основе типов данных и несущих представлена в работе [21]. В дополнение к классификации были добавлены методы расширения спектра и мультиплексирования, широко применяющиеся в построении канала управления БПЛА (рисунок 6).
Аналоговая модуляция является самой первой и простой из всех перечисленных. Представлена амплитудной, фазовой и частотной модуляцией, в соответствии с изменением амплитуды сигнала, фазы или частоты. В создании канала управления БПЛА занимает техническую роль как составляющий элемент более сложных систем, о которых будет сказано далее.
Цифровая модуляция включает в себя различные методы преобразования цифровых данных в сигналы для передачи через коммуникационные каналы [22]. Рассмотрим основные из них:
-
1. Амплитудная манипуляция (ASK): в этом методе амплитуда сигнала изменяется в зависи-
Таблица 2. Сравнительная характеристика систем радиопередачи
ОО
Q
чо
Q
S
GO
Q
GO
Q
и S GO Q
ел
И
<
GO
GO GO
рр
<
н GO GO
рр
ел ей
Вид модуляции
GO GO И РР
GO GO К РР
о
GO
GO
z м
z м
GO GO
РР
GO GO
РР
GO GO
РР
<
GO GO GO
Q
о
Частотный диапазон
2,4
2,4
868–915
2,4
2,4
2400–2483,5
2,4
2,4
2,4
868 МГц–
ГГц
ГГц
МГц
ГГц
ГГц
МГц
ГГц
ГГц
ГГц
2,4 ГГц
Дальность передачи
s о о о 7 о о ш
о
7
О
о 40
О О
о
О
40
О
О о 7 о
40
X
S
к
о
X s
к
о
3
+
Количество каналов управления
ОО
40
7
40
7
40
04
40
О
+ ОО
о
о
сч
+ ОО
40
7
40
Совместимость
Только Frsky
Только Spektrum
Только Flysky
Только Hitec
Только Futaba
Универсальный
Проприетарность
Да
Да
Да
Да
Да
Да
Да
Да
Да
Да
Нет
Шифрование
Нет
Есть
Есть
Нет
Нет
Есть
Нет
Есть
Есть
Есть
Нет
-
2. Фазовая манипуляция (PSK): в PSK фаза несущего сигнала изменяется в соответствии с передаваемыми битами данных. Например, для представления «0» и «1» можно использовать фазы 0 и 180 градусов. PSK более устойчив к помехам по сравнению с ASK, но его реализация сложнее.
-
3. Квадратурная амплитудная модуляция (QAM): сочетает амплитудную и фазовую модуляцию для представления данных. Это позволяет обеспечить более высокую скорость передачи данных на той же полосе частот. QAM широко используется в современных телекоммуникационных системах, таких как Wi-Fi и кабельное телевидение. QAM имеет несколько разновидностей в зависимости от количества кодируемых битов данных, существует QAM-4, QAM-8, QAM-16 и так далее, где кодируется 4, 8 и 16 битов данных соответственно. Недостатком QAM является повышенная сложность и чувствительность к шуму.
-
4. Частотная манипуляция (FSK): в FSK частота несущего сигнала изменяется в зависимости от передаваемых данных. Для представления «0» и «1» могут использоваться две разные частоты. FSK является достаточно устойчивым к помехам и широко используется в радиосвязи, однако требует большей полосы частот по сравнению с другими методами.
мости от передаваемых данных, аналогично аналоговой модуляции. Для представления битов «0» и «1» используются сигналы с разной амплитудой. Преимущества ASK включают простоту реализации, однако метод подразумевает возможность возникновения помех и шума.

Рисунок 6. Категоризация модуляции сигнала на основе типов данных и несущих
Мультиплексирование дает возможность объединить несколько каналов в один диапазон частот, позволяя обеспечить высокую скорость соединения и устойчивость к помехам. Применяемые методы – OFDM (Orthogonal Frequency Division Multiplexing) и его улучшенный вариант COFDM (Coded Orthogonal Frequency Division Multiplexing).
OFDM – это метод, который разделяет широкополосный канал на множество узких подканалов, передаваемых одновременно на различных частотах. Этот метод обеспечивает высокую эффективность передачи данных и устойчивость к интерференции и многолучевому распространению сигнала. Каждая поднесущая передается ортогонально к другим, что позволяет избежать взаимных помех. OFDM широко применяется в современных системах связи, таких как Wi-Fi, LTE и цифровое телевидение.
COFDM – это кодированное ортогональное частотное мультиплексирование COFDM являющееся расширением OFDM, включающим дополнительное кодирование для повышения надежности передачи данных. В COFDM используются корректирующие коды, такие как код Рида-Соломона, для защиты данных от ошибок, вызванных шумами и интерференцией. Это делает COFDM особенно эффективным методом в сложных радиосредах. COFDM также применяется в цифровом телевидении и радиовещании, например, в DVB-T и DAB.
Методы расширения спектра являются способом повышения эффективности радиопередачи с применением различных типов модуляции. На данный момент используются три метода: псевдослучайная перестройка рабочей частоты (ППРЧ или FHSS), расширение спектра методом прямой последовательности (ПРС или DSSS), расширение спектра методом линейной частотной модуляции (ЛЧМ или CSS) [23].
Частоты, используемые в БПЛА, можно разделить на несколько диапазонов [24]:
-
1. Диапазон 433 МГц – 447 МГц (управление, телеметрия).
-
2. Диапазон 860 МГц – 930 МГц (управление, телеметрия).
-
3. Диапазон 1100 МГц – 1300 МГц (видео, GPS навигация).
-
4. Диапазон 1300 МГц – 1500 МГц (управление; видео).
-
5. Диапазон 1560 МГц – 1610 МГц (GPS / Глонасс навигация).
-
6. Диапазон 2400 МГц – 2500 МГц (управление, видео).
-
7. Диапазон 5150 МГц – 5250 МГц (управление).
-
8. Диапазон 5725 МГц – 5850 МГц (видео).
Наиболее распространенные диапазоны частот для управления FPV дронами включают 2,4 ГГц и 5,8 ГГц. Частота 2,4 ГГц является популярной и обеспечивает надежную связь на средних расстояниях. Частота 5,8 ГГц, в свою очередь, обладает более высокой пропускной способностью и меньше подвержена помехам, но ограничена дальностью передачи.
Каждый диапазон имеет свои преимущества и недостатки. Например, диапазон 2,4 ГГц обеспечивает большую дальность связи, но при этом могут возникать помехи от других устройств, работающих на этой же частоте. Диапазон 5,8 ГГц, напротив, предлагает более стабильную связь и меньшую задержку, но имеет ограничения по дальности и может быть менее устойчив к помехам.
Для повышения помехоустойчивости, дальности работы и шифрования используют избыточное кодирование [25]. Одними из самых часто используемых кодов являются следующие: код Хемминга, код Рида-Соломона, код с малой плотностью проверок на четность, сверточный код (Low-Density Parity-Check, LDPC), Турбокод. Коды могут быть блоковыми (состоять из отдельных блоков) с кодирующей матрицей, линейными и нелинейными, двоичными и с большим количеством битов.
В работе по исследованию внедрения шифрования AES (Advanced Encryption Standard –сим-метричный алгоритм блочного шифрования) в канал управления с линейной частотной модуляцией сигналом (ELRS). В работе [26] получены результаты математического моделирования. Время задержки обработки микрокомпьютером зашифрованных данных в большинстве случаев использования является малым и незначительным. При частоте передачи 150 Гц, 250 Гц, 500 Гц, 1000 Гц, среднее время шифрования и дешифрования составило: 0,0009138 с, 0,0010964 с, 0,002586 с и 0,0048266 с соответственно.
Частным случаем радиопередачи можно считать радиопередачу с использованием спутниковых ретрансляторов. Был разработан и испытан экспериментальный образец комплекса средств спутниковой радиосвязи, который состоит из бортового спутникового терминала и наземного спутникового терминала [27]. Для обеспечения связи был использован уже выведенный на орбиту спутник. В своей системе они использовали частоту для приема от 10,95 до 12,75 ГГц, а для передачи – от 13,75 до 14,50 ГГц. Возможность использования модуляции: QPSK (поддержка FEC 1/3, 2/5, 1/2, 3/5, 2/3, 3/4, 4/5, 5/6, 8/9), 8PSK (поддержка FEC 3/5, 2/3, 3/4, 5/6, 8/9), 16PSK (поддержка FEC 2/3, 3/4, 4/5, 5/6, 8/9). Помехоустойчивое кодирование LDPC+БЧХ.
Реализация канала управления с использованием оптического канала
Методы построения лазерной связи с БПЛА с помощью волоконных сумматоров представлены на рисунке 7.

Рисунок 7. Методы построения лазерной связи с БПЛА
Атмосферные линии связи – один из инновационных методов передачи данных. В данном способе данные передаются при помощи электромагнитных волн, как и в радиопередаче, но с использованием оптической длины волны [28]. Данная технология получила развитие в середине 20 века и была названа беспроводной оптической передачей данных (БОПД). При соблюдении прямой видимости в рамках атмосферы дальность может достигать 7 км.
По сравнению с предыдущими методами БОПД имеет следующие существенные достоинства: невозможность перехвата сигнала и высокая помехозащищенность. Главным же недостатком системы является требование к прямой видимости между передатчиком и приемником.
В своих работах ученые Шастин Л.В., Поллер Б.В., Бритвин А.В. описали современную реализацию БОПД [29]. Они использовали и экспериментально проверили два метода: метод суммирования энергии с помощью кольцевой линии задержки и метод построения системы лазерной связи с БПЛА с использованием волоконного сумматора [30]. Методы отличаются структурой излучающей системы.
В первом случае входные волокна плотно упаковываются в многоволоконный провод, при этом излучение происходит в каждое волокно по отдельности (рисунок 8).
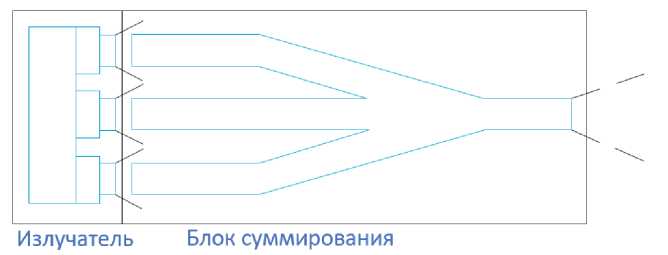
Рисунок 8. Схематичный пример структуры излучающей системы, построенной по первому методу
Второй метод заключается в установке оптоволоконного кольца (2) после излучателя (1) и оптического коммутатора (3), выполняющего роль затвора (рисунок 9). Излучатель подает сигналы в нужный момент времени с необходимой частотой, определенной стандартом частоты (4).
Каждый такой импульс складывается с предыдущим, что в результате обеспечивает более высокую мощность интерференции. При достижении необходимой мощности оптический коммутатор открывает затвор и сигнал отправляется.
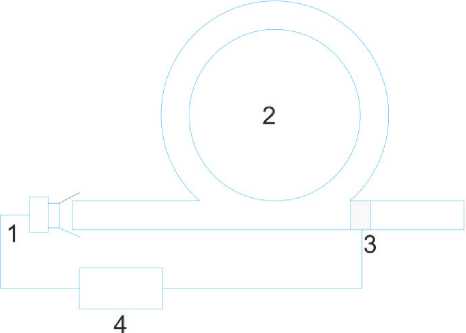
Рисунок 9. Схематичный пример кольцевого сумматора
По результатам исследований кольцевой сумматор показал наибольшую эффективность, но проигрывает многоволоконному проводу в простоте реализации.
Заключение
Беспилотная авиационная система состоит из большого количества компонентов, основные из которых следующие: полетный контроллер; винтомоторная группа; рама; камера; система связи, система питания. В системе связи имеется два уровня RX – для проводного соединения приемника и полетного контроллера дрона и TX – для связи между приемником и передатчиком установленном на аппаратуре управления. Основные команды управления дроном (тангаж, крен, газ, рысканье) занимают основной объем передаваемых данных, например для ELRS 40 бит на передаваемый пакет. Для сравнения на вспомогательные команды с тумблеров выделяется 1 бит на каждый (значения 0 или 1).
В статье приведена классификация методов реализации канала управления между наземной станцией управления и беспилотным летательным аппаратом. Представленные методы: проводной и беспроводной.
Проводной метод может быть реализован с использованием оптоволоконного или металлического провода. Первый вариант позволяет снизить массу провода, но требует использования дополнительного оборудования в виде оптоволоконного трансивера.
Беспроводной метод может быть реализован с использованием электромагнитных волн ради- очастоты в первом случае и оптического спектра во втором. Длина радиоволны не требует прямой видимости в отличие от оптической, но имеет меньшую помехозащиту, защиту от взлома, большую дальность и простоту реализации. Основные характеристики радиоканала, влияющие на качество сигнала за исключением антенн: модуляция, выбор несущей частоты, кодирование. В рамках модуляции самыми распространенными методами являются методы расширения спектра: DSSS, CSS, FHSS. Для мультиплексирования каналов используют OFDM и COFDM. Используемые частоты представлены диапазонами: 433 МГц – 447 МГц, 860 МГц – 930 МГц, 1100 МГц – 1300 МГц, 1300 МГц – 1500 МГц, 1560 МГц – 1610 МГц, 2400 МГц – 2500 МГц 5150 МГц – 5250 МГц, 5725 МГц – 5850 МГц.
Атмосферная линия связи, реализованная с помощью оптических сигналов, позволит избавиться от провода, тем самым повысив верхнюю границу возможностей дрона по поднятию полезной нагрузки. Есть два варианта реализации: с использованием многоволоконного сумматора и с применением кольцевой линии задержки. Первый метод проще и дешевле в реализации, второй же обеспечивает большую выходную мощность.
