Обзор известных силовых способов измерения реактивной тяги ионных двигателей: торсионные маятники

Автор: Вавилов И.С., Локотаев Д.В., Ячменев П.С., Федянин В.В., Жариков К.И., Степень П.В., Лукьянчик А.И.
Журнал: Журнал Сибирского федерального университета. Серия: Техника и технологии @technologies-sfu
Рубрика: Исследования. Проектирование. Опыт эксплуатации
Статья в выпуске: 2 т.17, 2024 года.
Бесплатный доступ
В работе представлен обзор большинства существующих конструкций силовых стендов на основе торсионного маятника, предназначенных для измерения тяги ионных двигателей. Представлено 23 уникальных конструкций стендов, разработанных различными научными группами. Данные стенды охватывают диапазон установившихся тяг от 10 нН до 4,5 Н и импульсов тяги в диапазоне от 1 мкН·с до 10 Н·с. Охвачен временной участок от 1971 до 2019 г. Показаны способы регистрации микроперемещений чувствительного элемента, демпфирования паразитных колебаний и калибровки стендов. Приведены данные по погрешностям измерения тяги стендами.
Торсионный маятник, оптический датчик, реактивная тяга, ионный двигатель, калибровка, lvds, ёмкостный датчик
Короткий адрес: https://sciup.org/146282847
IDR: 146282847 | УДК: 629.7.018
Overview of known power methods for measuring the jet thrust of ion engines: torsion pendulums
The paper presents an overview of the majority of existing designs of power stands based on a torsion pendulum designed to measure the thrust of ion thruster. 23 unique stand designs developed by various scientific groups are presented. The presented stands cover the range of steady-state loads of 10 nN to 4.5 N and thrust pulses in the range from 1 µN · s to 10 N ·s. The temporary section from 1971 to 2019 is covered. The methods of recording micro displacement of the sensing element, damping of parasitic vibrations and calibration of stands are shown. Data on errors in the measurement of traction by stands are presented.
Текст научной статьи Обзор известных силовых способов измерения реактивной тяги ионных двигателей: торсионные маятники
Благодарности. Исследование выполнено за счет гранта Российского научного фонда № 19– 79–10038, –79–10038/
Цитирование: Вавилов И. С. Обзор известных силовых способов измерения реактивной тяги ионных двигателей: торсионные маятники / И. С. Вавилов, Д. В. Локотаев, П. С. Ячменев и др. // Журн. Сиб. федер. ун-та. Техника и технологии, 2024, 17(2). С. 214–238. EDN: OQZTKV весы с двойным маятником и весы с магнитной левитацией. Чувствительными элементами в таких конструкциях являются лазерные интерферометры, волоконно-оптические датчики линейных перемещений (LDS), гетеродинные интерферометры, ёмкостные датчики, датчики дифференциального трансформатора линейного перемещения (LVDT). Недостатки этих элементов – чувствительность к электромагнитным помехам и ВЧ/СВЧ-полям, что наблюдается при испытаниях ионных двигателей с постоянной разностью потенциалов на электродах ионнооптической системы (ИОС) и с СВЧ-генерацией плазмы.
Аэродинамический метод основан на определении силы давления ионной струи на чувствительный элемент, в результате чего элемент перемещается или деформируется. По величине перемещения или деформации определяется величина реактивной тяги. В источнике [1] представлены виды фундаментальных схем устройств измерения тяги микродвигателей (рис. 1). В источнике [1] аэродинамический метод именуется как метод измерения тяги с помощью мишени и является разновидностью маятникового метода. Возможности аэродинамического метода и маятникового в части измерения тяги и импульса двигателя равнозначны. Возможности метода измерения тяги с помощью качели шире других способов, так как он позволяет определять массовый расход рабочего тела.
В основе всех подходов лежат простые физические принципы, однако мизерность измеряемых силовых величин является главной сложностью подобного рода измерений. В основе разрабатываемых стендов должна сохраняться базовая простота принципа измерения, так как систем калибровки и эталонных воздействий таких малых величин сил (нН и мкН) не существует. Страховкой от ошибочной интерпретации результатов измерений является простота математического аппарата и ограниченное число факторов влияния.
Материал, представленный в этой статье, служит частью большого обзорного исследования силовых методов определения малых реактивных тяг. Данная статья рассматривает мировые
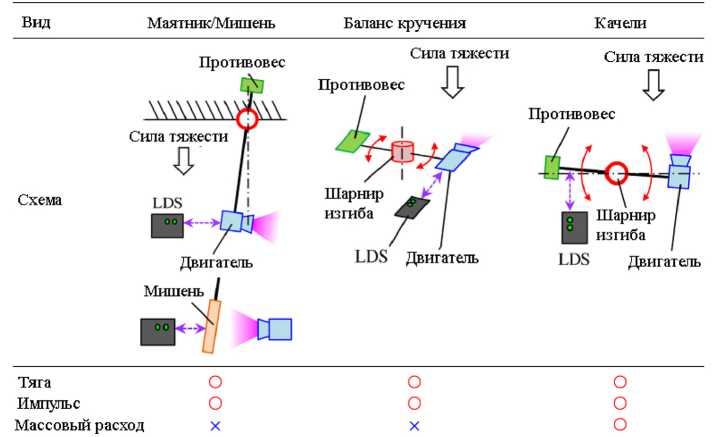
Рис. 1. Конструктивные схемы основных принципов измерения тяги и их возможности
Fig. 1. Design schemes of the basic principles of traction measurement and their capabilities достижения в области торсионных маятниковых стендов (баланс кручения). Всё обзорное исследование даёт представление о современном состоянии дел в области стендового измерения микротяги ионных двигателей. Необходимость обзорной работы обусловлена тем, что авторы данной статьи ведут научные изыскания в области резонаторных СВЧ-ионных двигателей для малых космических аппаратов микро- и нанокласса и сами столкнулись с проблемой экспериментального определения уровня тяг ионных двигателей с энергопотреблением до 10 Вт. Данная категория двигательных систем имеет уровни тяг до 50 мкН. На материально-технической базе научно-исследовательской лаборатории «Двигательные установки микротяги малых космических аппаратов» разработан стенд измерения микротяги на основе силового аэродинамического метода. Данный стенд будет представлен в следующих опубликованных частях большого обзорного исследования.
Торсионные маятники (баланс кручения)
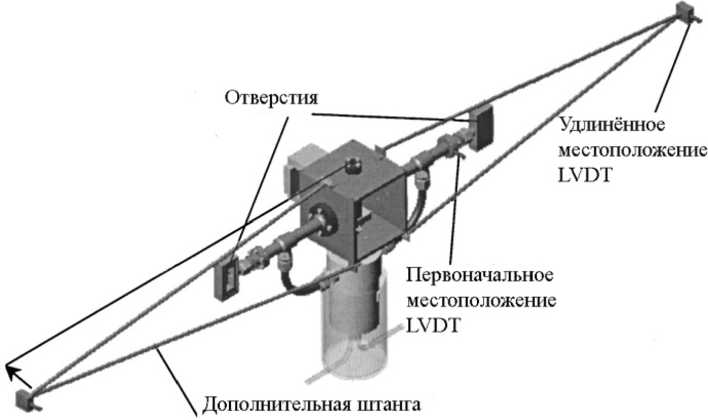
На основе торсионного маятника для измерения тяги двигательных установок MEMS (microelectromechanical systems) был разработан стенд nNTS (nano-Newton thrust stand) [2]. Для поддержки упорной стойки и обеспечения восстанавливающего усилия используются два из-гибных шарнира (рис. 2). Постоянная упругости шарниров 0,0016 Н·м/0. Стенд симметричен относительно оси вращения. Рычаги упорной стойки длиной 25 см от оси вращения. Для измерений тяги менее 1 мкН к стенду были добавлены удлинители, обеспечивающие большие отклонения. Схематично это показано на рис. 3. Измерения тяги включают в себя измерение углового смещения, возникающего в результате крутящего момента, приложенного к демпфированной поворотной системе. Определение углового отклонения заключается в измерении линейного перемещения на известном радиальном расстоянии с использованием датчиков LVDT.
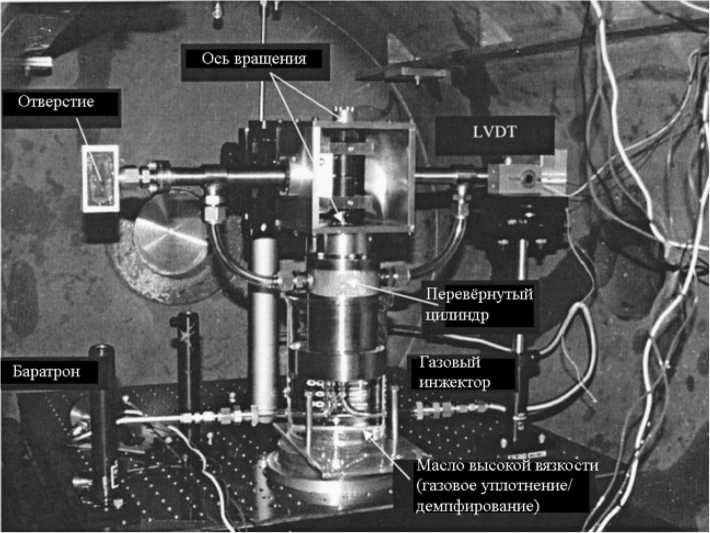
Рис. 2. Стенд nNTS в вакуумной камере
Fig. 2. nNTS stand in a vacuum chamber
для массовой балансировки
Рис. 3. Стенд nNTS с удлинителями
Fig. 3. nNTS stand with extension cords
Датчик LVDT расположен приблизительно в 19,7 см от оси вращения в стандартной конфигурации и в 61 см от оси вращения в конфигурации с вытянутой рукой. При уровне тяги 100 нН линейное перемещение на концах рычагов удлиненной конфигурации составляет приблизительно 0,264 мм.
Конструктивным ограничением для измерений тяги является невозможность прямого механического подключения линий подачи топлива или энергии к тяговому стенду. В стенде nNTS это достигается установкой нескольких ванн для жидкости. Назначение ванны с высоковязким маслом:
-
– газовое уплотнение, благодаря чему топливо, подаваемое в перевернутый цилиндр стенда (рис. 4), не выходит в окружающий вакуум иначе как через двигательную установку;
-
– вязкостный демпфер для системы упорной стойки.
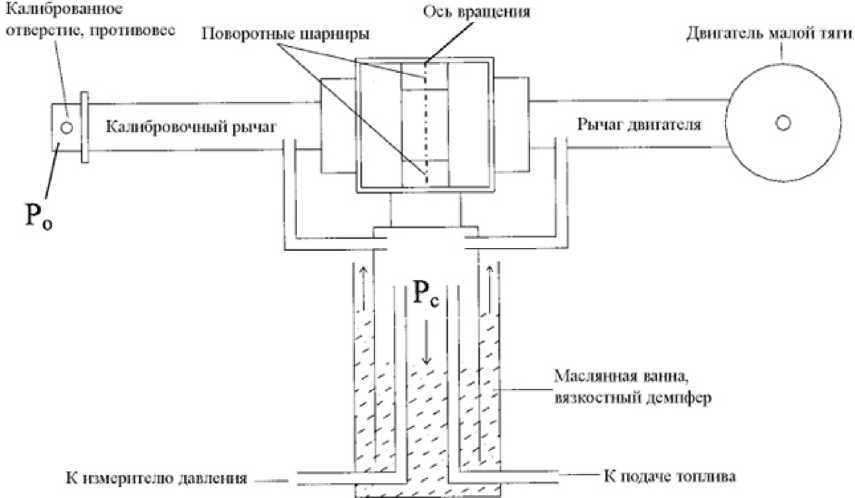
Рис. 4. Схема стенда с масляной ванной
-
Fig. 4. Diagram of the stand with an oil bath
Уровень вязкостного демпфирования меняется путем изменения высоты слоя масла по бокам перевернутого цилиндра.
Стенд позволяет проводить измерения уровня тяги до 86,2 нН с оценочной точностью ±11 %, уровни тяги в диапазоне от 712 нН до 1 мкН – с оценочной точностью в ±2 %. Стенд калибруется с использованием результатов прямого моделирования численных моделей Монте-Карло и аналитических решений для потока свободных молекул через калиброванное отверстие. Калибровочные газы – гелий, аргон, азот.
В работе [3] представлен упорный стенд, состоящий из четырёх компонентов: балансира, датчиков LVDT, электромагнитного демпфера и подвижного шарнира (рис. 5).
На крутильных весах установлен двигатель, а противовес находится с другой стороны. Ось вращения поддерживается двумя поворотными (торсионными) шарнирами. Отклонение весов обнаруживается с помощью датчика LVDT. Для подавления нежелательных вибраций, вызванных фоновыми колебаниями, установлен электромагнитный демпфер. Калибровка выполняется путем удара по упорной стойке ударным маятником. Ударный маятник ударяется о датчик силы, закрепленный на упорной стойке. Датчик силы записывает временную диаграмму силы импульса, интегрирование дает значение импульса. Воздействие варьировалось от 80 до 300 мкН·с путем изменения начального угла наклона маятника. Расстояние до двигателя составляло от 35 до 45 см в зависимости от конфигурации двигателя. Эффективный импульс, подаваемый на тяговый стенд, составлял 20–80 мкН·с. Стенд предназначен для измерения тяги импульсных микродвигателей: жидкостного импульсно-плазменного двигателя (LP-PPT) и абляционного лазерного микродвигателя. Точность упорного стенда составила 2,1 мкН·с в случае LP-PPT и 0,7 мкН·с в случае абляционного лазерного микродвигателя.
Ещё один торсионный стенд представлен в работе [4]. Тяговый стенд µNTS (micro-Newton thrust stand) предназначен для измерения усилий, меньших 1 мкН, предпочтительно до 10 нН. На рис. 6 показана 3D-модель стенда.
Поперечная балка несимметрична с боков для оптимизации чувствительности в условиях ограниченного пространства. Медный блок, подвешенный на коротком конце поперечной балки, действует как противовес и уравновешивает несимметричную балку. Пара алюминиевых
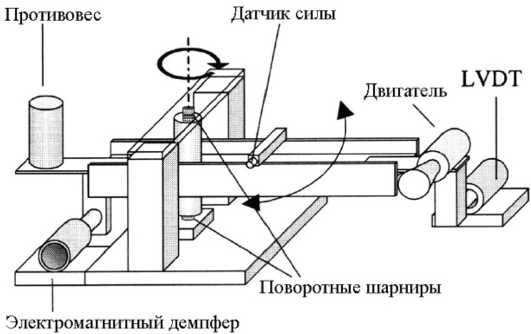
Рис. 5. Схематичное изображение стенда тяги
Fig. 5. Schematic representation of the traction stand
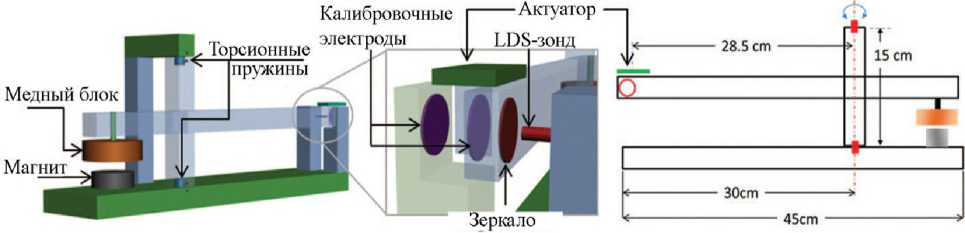
Рис. 6. 3D-модель стенда µNTS
Fig. 6. 3D-model of the µNTS stand дисковых электродов обеспечивает известное усилие или контролируемое смещение для калибровки. Оптический датчик линейного перемещения (модель Philtec D-100) измеряет смещение балансира на определенное расстояние для расчета углового отклонения.
Для исследования коллоидного двигателя (тяга в диапазоне 2–13 мкН) и импульсного плазменного двигателя (импульсы до 19 мкН·с) был разработан стенд на основе крутильных весов [5]. Конструкция основана на торсионных шарнирах и электростатических силах (для калибровки и активного демпфирования). Стенд позволяет тестировать двигатели массой в несколько килограммов и измерять силы на уровне до 1 мкН с разрешением более 0,03 мкН. На рис. 7 представлена схема стенда.
Поворотный рычаг поддерживается алюминиевой рамой, закрепленной на вакуумной установке. Наклон рамы регулируется с помощью двух шаговых двигателей. Рычаг вращается вокруг оси, образованной двумя торсионными шарнирами, прикрепленными как к раме, так и к рычагу. Каждая ось может выдержать осевую нагрузку до 431 Н. Линейное смещение рычага с плечом 0,22 м от оси вращения измеряется датчиком LDS. Набор электродов (два обращенных друг к другу диска) использовался для калибровки смещения весов, возникающего в результате заданного крутящего момента. Один диск (диаметром 5,08 см) был прикреплен
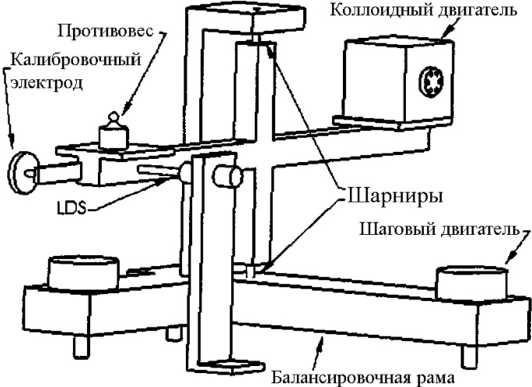
Рис. 7. Схема крутильных весов
Fig. 7. Scheme of torsion scales к весам, второй диск (диаметр 1,9 см) был закреплен на внешнем позиционере. Зазор между дисками обычно составлял 1,10 мм (фактическое значение измерялось для каждой калибровки). Расстояние между осью дисков и осью весов составляло 0,266 м. Для балансировки применялась электростатическая сила по следующим причинам:
-
– она действует на расстоянии, т.е. между вращающимся рычагом и прижимным элементом нет физического контакта;
-
– электростатическая сила может быть точно рассчитана;
-
– ее амплитуду можно изменять «непрерывно»;
-
– ее временным изменением можно управлять в масштабах, значительно меньших, чем характерное время отклика весов.
Электростатическая сила на поверхности электродов была рассчитана с использованием программных пакетов MAXWELL 2D и MAXWELL 3D.
Диапазон измерений упорного стенда, представленного в [6], составляет 1…3000 мкН для стационарных измерений силы с точностью около 1 мкН при окружающем шуме. Основными элементами являются маятниковый рычаг, калибровочная катушка, демпфер, датчик смещения и два торсионных шарнира (рис. 8). Каждый шарнир имеет постоянную упругости 1,92 ∙ 10–4 Н·м/0. Датчик смещения в системе – емкостный сенсор, имеющий дальность действия 100 м и точность 2 нм. Демпфер состоит из круглого постоянного магнита и медной пластины, работает по закону Ленца, но также действует как противовес. Этот маятник выдерживает осевую нагрузку до 2 кг. Маятниковый рычаг длиной 50 см использовался для уравновешивания силы тяжести и преобразования тяги в смещение.
В стенде реализован метод электромагнитной калибровки. Система калибровки для генерации внешнего возбуждения состоит из двух компонентов: постоянного магнита и медной катушки. Катушка закреплена на опорной пластине напротив магнита, закрепленного на стойке, и соединена с высокоточным источником тока, образуя систему магнит-катушка, обеспечивающую известное усилие от 2 до 10000 мкН. Плоский цилиндрический магнит изготовлен из сплава рубидия и никеля.
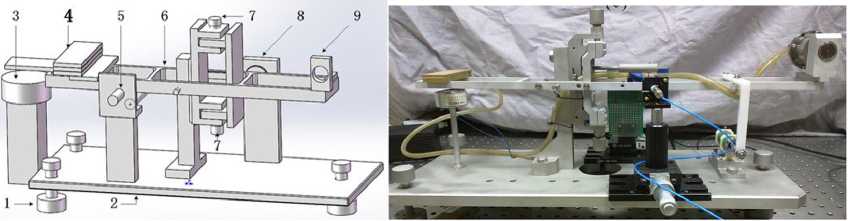
Рис. 8. Принципиальная схема и фотографическое изображение стенда: 1 – выравнивающий болт; 2 – опорная плита; 3 – демпфирующий магнит; 4 – противовес и демпфирующая пластина; 5 – датчик перемещения; 6 – маятниковый рычаг; 7 – ось поворота (пара); 8 – система калибровки; 9 – крепление подруливающего устройства
Fig. 8. Schematic diagram and photographic image of the stand: 1 – leveling bolt; 2 – base plate; 3 – damping magnet; 4 – counterweight and damping plate; 5 – motion sensor; 6 – pendulum lever; 7 – axis of rotation (pair); 8 – calibration system; 9 – thruster attachment devices
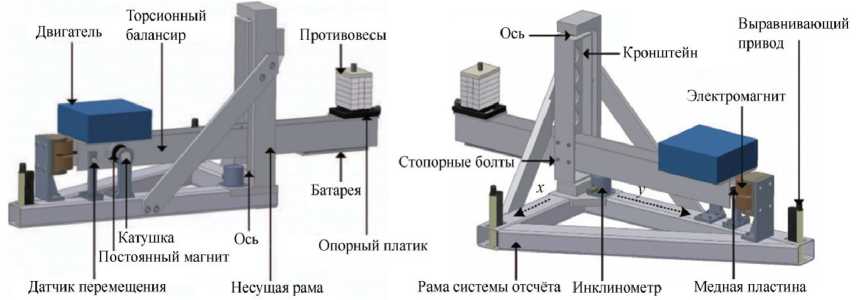
Рис. 9. 3D-изображение стенда
Fig. 9. 3D-image of the stand
Пример ещё одного крутильного маятника представлен в источнике [7]. 3D-изображение стенда показано на рис. 9.
Устройство состоит из следующих основных элементов: опорной рамы, емкостного датчика перемещения, катушки, демпфера и системы выравнивания. Опорная рама образует основание упорного стенда. Опорный рычаг проходит через два шарнира, прикрепленных к опорной раме, один конец рычага поддерживает микродвигатель, другой поддерживает противовес, позволяющий компонентам достичь статического равновесия. Система отсчета должна быть выровнена как в направлении Х, так и в направлении Y, чтобы обеспечить горизонтальную привязку. Система выравнивания состоит из двухосного инклинометра (Measurement Specialties, NS-5/DMG2-I, разрешение: 0,001◦) и приводов выравнивания (Newport, LTA-HL, разрешение: 7,4 нм). Инклинометр измеряет углы наклона в направлениях X и Y системы отсчета, а приводы выравнивания регулируют углы.
Тяговый стенд выдерживает нагрузку до 10 кг и теоретически может измерять усилие до 609,6 мкН с разрешением 24,4 нН. Статические калибровки были выполнены на основе калибровочного узла, состоящего из многооборотной катушки и постоянного магнита. Узел из многооборотной катушки и постоянного магнита также использовался в качестве возбудителя для имитации микродвигателя с целью дальнейшего исследования характеристик тяги. Были протестированы три набора силовых импульсов частотой 17; 33,5 и 55 Гц с одинаковой амплитудой и длительностью импульса. Ошибка повторяемости на каждой частоте составила 7,04 %, 1,78 % и 5,08 % соответственно.
Харбинский технологический институт разработал трехпроводное устройство для измерения силы кручения [8]. На рис. 10 представлена схема, где подруливающее устройство закреплено в плоскости кручения.
Торсионная платформа поднимается с помощью трех нитей, противовес уравновешивает платформу. Создаётся равномерное усилие к трёхпроводной системе. Тяга, создаваемая работой двигателя, приводит к кручению. Поворотный стол отклоняется вместе с зеркалами, установленными на платформе. Величина отклонения определяется за счет смещения лазерного пятна на линейке. По величине отклонения определяется тяга. Стенд является только механи- – 222 –
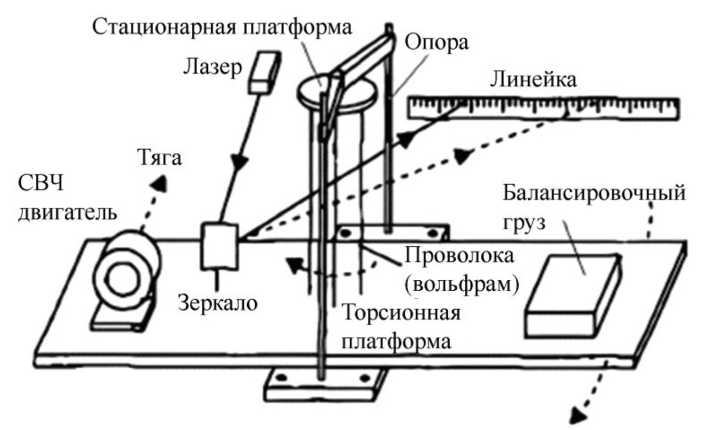
Рис. 10. Схема торсионного стенда с трёхпроводным подвесом
Fig. 10. Diagram of a torsion stand with a three-wire suspension
ческим устройством и поэтому не подвержен электромагнитным помехам. Калибровка производится изменением веса. Уменьшением силы трения в ролике можно добиться высокой точности измерения тяги [9]. В диапазоне тяги не менее 3 мН минимальная погрешность измерения прибора составляет 1,5 % [10].
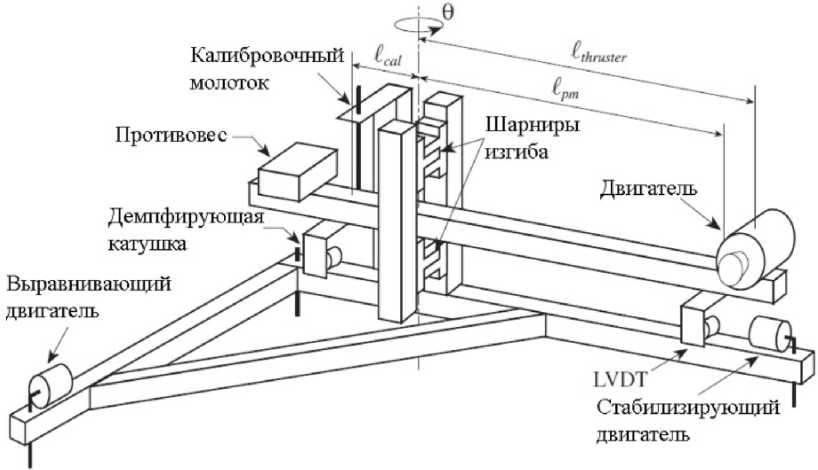
Стенд для измерения тяги на уровне субмикроньютонов µTS, представленный в [11], использовался для оценки тяги пяти различных микродвигателей. Используя конструкцию крутильных весов, стенд способен измерять установившуюся тягу в 1 мкН с разрешением субмикроньютон и импульс в 1 мкН·с с разрешением субмикроньютон-секунды. Стенд (рис. 11) может поддерживать испытуемый объект массой до 10 кг, одновременно подводя к двигателю несколько диагностических линий, линий питания и топливоподачи. Тяга, или импульс, измеряется путем контроля положения тягового рычага и использования откалибро-
Противовес
Двигатель
Калибровочный молоток \
Демпфирующая катушка
^-——^^урт
Шарниры изгиба р ^thruster
Выравнивающий двигатель
LVDT ---
Стабилизирующий двигатель
Рис. 11. Конструкция стенда µTS
Fig. 11. Construction of the stand µTS
ванной динамической модели. С помощью этого испытательного стенда были измерены характеристики вакуумно-дугового двигателя (VAT), импульсно-плазменного двигателя с газовым питанием (PPT), электродвигателя с эмиссионным излучением индия (In-FEEP), микродвигателя с испаряющейся жидкостью (VLM) и микродвигателя с холодным газом для подтверждения его точности.
В Центре космических полетов имени Годдарда НАСА создан стенд измерения тяги для двигателей, соответствующих требованиям проекта LISA [12]. Стенд представляет собой торсионные весы, в которых используется несколько методик, разработанных для измерения гравитационной постоянной Ньютона [6]. Стенд может работать в ре-
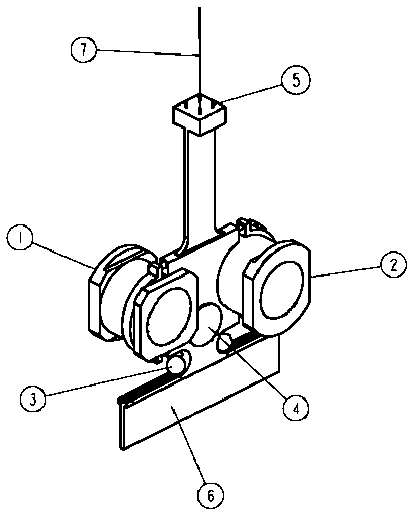
Рис. 12. Схема маятникового стенда
Fig. 12. Schema of the pendulum stand
жиме разомкнутого контура или в активно управляемом нулевом режиме с использованием электростатических приводов для уравновешивания крутящего момента от двигателя. Стенд использовался для измерения абсолютной тяги от 1 до 100 мкН с разрешением более 0,1 мкН, шума от усилия стационарного двигателя от 10–4 до 1 Гц и динамический отклик двигателя от 10–4 до 10 Гц. Маятник с упорной стойкой показан на рис. 12.
Стенд располагается внутри вакуумной камеры. Двигатель (поз. 1) установлен с одной стороны торсионного маятника. Напротив торсионной нити (поз. 7) установлен небольшой груз (поз. 2) для уравновешивания веса двигателя. Угловое положение маятника контролируется с помощью автоколлиматора, направленного на зеркало (поз. 4) в центре маятника. Основная торсионная нить поддерживается более толстой нитью, которая изолирует тонкую нить от наклона. К толстой нити прикреплен гаситель вихревых токов для гашения колебаний. Четыре автономных электрода нацелены на корпус маятника (поз. 6) для приложения усилий обратной связи и калибровки маятника. Датчик емкости также нацелен на корпус маятника и позволяет следить за его колебанием. Момент инерции подставки может быть определен путем измерения изменения периода кручения после перемещения известных масс (поз. 3) на фиксированное расстояние от оси вращения. Сигналы питания и управления передаются по тонким проводам и прикрепляются к верхней части маятника (поз. 5). Торсионная нить служит основанием для маятника и двигателя. Высоковольтные силовые сигналы экранированы, чтобы предотвратить появление помех от коронального разряда и воздействия поля.
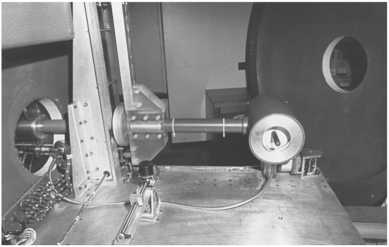
В источнике [13] представлена оптическая интерферометрическая проксимальная измерительная система (IPS) для измерения тяги и импульсного разряда импульсных электрических двигателей малой тяги. Данный тяговый стенд на базе IPS обладает преимуществом в части измерения тяги без электромагнитных помех с высокой точностью (погрешность < 2 %) в широком диапазоне импульсов (от 100 мкН·с до 10 Н·с). Теоретически показано, что IPS способен – 224 –
Угловые отражатели
Рис. 13. Фотографическое изображение и схема работы стенда
Fig. 13. Photographic image and the scheme of the stand operation
Прямоугольная призма
Окно
Стенка камеры Стол стенда тяги
Фильтр 3 нм Диодный датчик
HeNe лазер Светоделитель Регулируемое
измерять установившиеся значения тяги до 20 мкН. Тяговый стенд на базе IPS основан на измерении динамической характеристики качающегося рычага с помощью лазерного интерферометра с двумя датчиками с точностью определения положения 10 нм. Стенд в вакуумной камере и схема работы стенда представлены на рис. 13.
Работа IPS-стенда основана на интерферометре Майкельсона [14]. Оптическая природа этой системы устраняет электромагнитные помехи. Другой особенностью является высокое пространственное разрешение оптической интерферометрии. Свет, излучаемый лазерным источником, разделяется на два луча в светоделителе. В конце пути каждого луча находится уголковый отражатель. Два луча отражаются обратно к светоделителю и проходят через линзу к диодным датчикам. Выходные сигналы с диодных датчиков записываются в ПК. Наличие нескольких полос достигается за счет небольшого смещения двух лучей на диодных датчиках. Когда длины пути, пройденные двумя лучами, отличаются на нецелочисленное число, кратное длине волны лазерного излучения, между ними возникает разница в фазовом угле при их воссоединении. Наложение этих двух волн приводит к конструктивной или деструктивной интерференции.
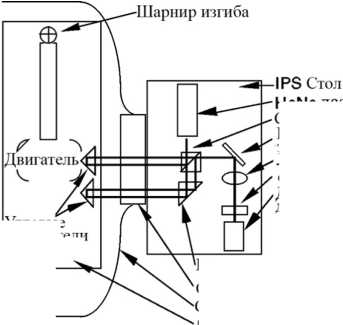
Был спроектирован и изготовлен тяговый стенд крутильного типа для испытания импульсных плазменных двигателей в одиночном и в повторяющемся режимах работы [15, 18]. Количество импульсов определяется строго в зависимости от прогиба стойки, жесткости пружины и собственной частоты. Точность метода была проверена с помощью качающегося ударного маятника (погрешность до 1 %).
Стенд был использован для тестирования пульсирующего плазменного двигателя (ППД) Lincoln экспериментального спутника LES-8/9. Было индивидуально измерено 34 одиночных импульса двигателя. Средний импульс составлял 266 мкН·с. Стенд представлен на рис. 14.
Одна из первых разработок торсионного маятника представлена в источнике [16]. Конструкция системы MERTS (micropound extended range thrust stand –микропоундовый тяговый стенд увеличенного радиуса действия) (рис. 15) имеет следующие характеристики:
– система полностью лишена трения. Единственный физический контакт с балансиром осуществляется через два изгибных шарнира. Шарниры обеспечивают требуемую низкую – 225 –
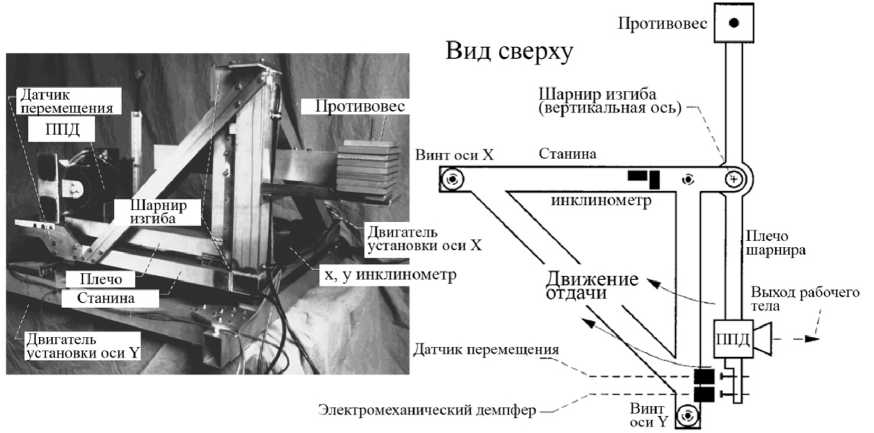
Рис. 14. Фотографическое изображение и схема стенда (вид сверху)
Fig. 14. Photographic image and scheme of the stand (top view)
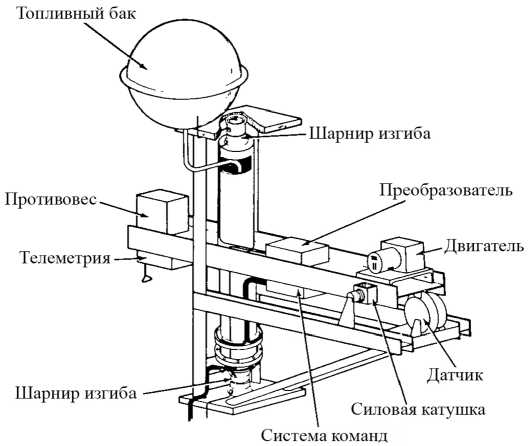
Рис. 15. Схема стенда MERTS
Fig. 15. Schema of the MERTS stand жесткость пружины при кручении и в то же время обеспечивают требуемую несущую способность;
-
– угловое смещение коромысла измеряется дифференциальным пластинчатым конденсатором;
-
– предусмотрены три диапазона измерения тяги: от 4,4 мкН до 445 мкН, от 445 мкН до 8,9 мН и от 8,9 мН до 222 мН. Для двух верхних диапазонов система работает в режиме нулевой балансировки;
-
– питание подается на балку через поворотные шарниры;
-
– предусмотрено как электромагнитное, так и вихретоковое демпфирование;
-
– телеметрическая система используется для получения данных датчиков от весов и двигателя;
-
– команды на двигатель активируются по оптическому каналу связи.
Резонансный стенд на основе торсионного маятника представлен в источнике [17]. Большинство торсионных стендов работает на методе стационарного смещения. На точность этого метода могут отрицательно влиять температурный дрейф и вибрации помещения. Данный упорный стенд работает по резонансному принципу, который сводит к минимуму воздействие внешних вибраций и температурных колебаний. Данный стенд разработан для измерения тяги микроимпульсных плазменных двигателей (μППД), работающих на частоте ~ 1 Гц. Данный тяговый стенд работает в колебательном, незатухающем режиме. Двигатель приводится в действие в резонансе с колебаниями поворотного рычага. Так как тяга резонансно прикладывается при движении поворотного рычага, амплитуда колебаний усиливается, что облегчает измерение. Движение поворотного рычага ведет себя как вынужденный гармонический генератор с соответствующим нечувствительным откликом на внешние колебательные силы. Система нечувствительна к тепловому дрейфу. Конструкция стенда представлена на рис. 16.
Данный стенд является модернизацией стенда, представленного в [15, 18]. Чтобы повысить чувствительность тягового стенда к микроньютонам силы, от метода стационарного перемещения отказались в пользу резонансного метода работы. Этот метод преднамеренно приводит в колебательное состояние упорную стойку без активного демпфирования, при этом приложенная сила (калибровочная или толкающая) воздействует на упорную стойку в течение половины периода каждого колебания.
Следует отметить, что авторы данной обзорной статьи проводили работу в части резонансного определения тяги ионного двигателя [19]. В отличие от упорного метода в резонанс вводился вертикальный маятник с установленной на нём мишенью (аэродинамический метод).
Для испытаний полевого эмиссионного электродвигателя (FEEP) был изготовлен упорный стенд на основе торсионных весов [20]. Двигатели FEEP отличаются высоким удельным импульсом и низким уровнем тяги (до 1 мкН). В стенде применена оптическая система считывания, электрические соединения установлены через подвесные линии, чтобы свести к мини-
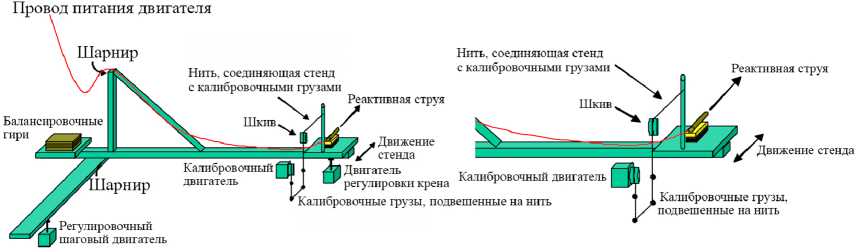
Рис. 16. Конструкция и метод калибровки стенда
Fig. 16. Design and calibration method of the stand
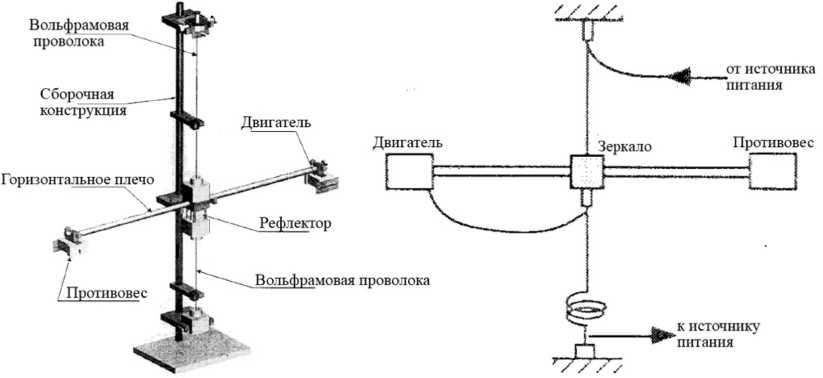
Рис. 17. Стенд и его электрическая схема
Fig. 17. The stand and its electrical schema муму механические помехи. Стенд рассчитан на измерение тяги в диапазоне 1–100 мкН с погрешностью менее 3 %. Стенд представлен на рис. 17.
Оригинальная конструкция стенда приведена в [21]. Было спроектировано и изготовлено устройство для измерения тяги методом газонаполнения. Все компоненты ионного двигателя были размещены на плавающем поворотном столе, поддерживаемом в осевом и радиальном направлениях газовым подшипником. Этим обеспечивалось вращение без трения. Измеренная тяга составила 83 % от значения, рассчитанного по току пучка и ускоряющему потенциалу.
Характеристики стенда: измерение тяги в диапазоне 100–200 мкН и вес всей системы не более 20 кг. На рис. 18 показаны эскизы стенда и упорного подшипника, а также фотографическое изображение стенда. Смазочный газ подается из газозаборника и выбрасывается через центральное отверстие упорного подшипника. Он плавает во внутреннем цилиндре. Ионная тяга измерялась с помощью датчика крутящего момента.
Стенд измерения малой тяги (в мкН) на основе крутильных весов представлен в [22]. Асимметричный рычаг способен вращаться с помощью двух изгибных шарниров. Линейное смещение рычага (которое является функцией приложенной силы тяги) измеряется с помощью оптического датчика перемещения. Весы состоят из симметричного рычага (полый прямоугольный алюминиевый профиль с длиной стороны 20 мм и общей длиной около 60 см), который может свободно вращаться с помощью двух поворотных шарниров (рис. 19). Шарниры были выбраны из-за их низкого трения, высокой линейности и незначительного гистерезиса. Шарниры способны выдерживать нагрузки порядка нескольких килограммов. Выбранный шарнир для изгиба – это шарнир G-10 от C -Flex Inc. (Нью-Йорк, США). Отклонение весов является линейной функцией приложенной силы.
В источнике [23] представлен крутильный стенд с разрешением тяги 25 нН, который может нести полностью работоспособный микродвигатель и источник питания общей массой до 15 кг. Тяговое усилие составляет 500 мкН с точностью 0,5 %, минимальный отклик устройства составляет 100 нН при точности 25 %. Так как это торсионный баланс с критическим – 228 –
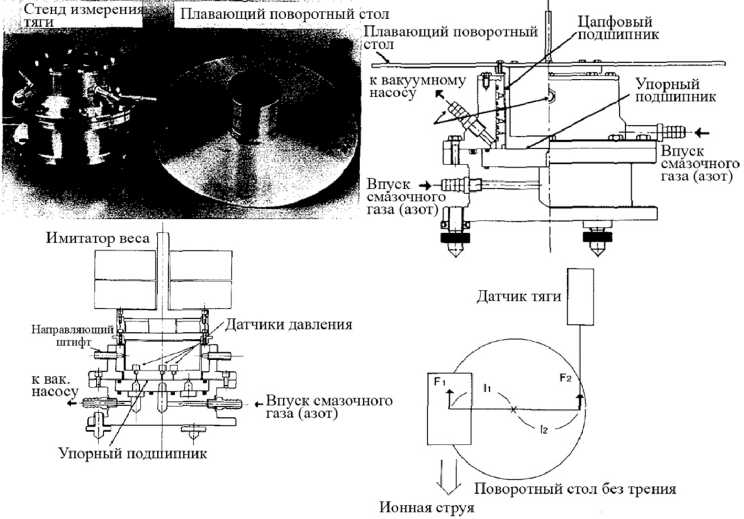
Рис. 18. Фотографическое изображение стенда, его схемы и принцип измерения тяги
Fig. 18. Photographic image of the stand, its schemes and the principle of traction measurement
б
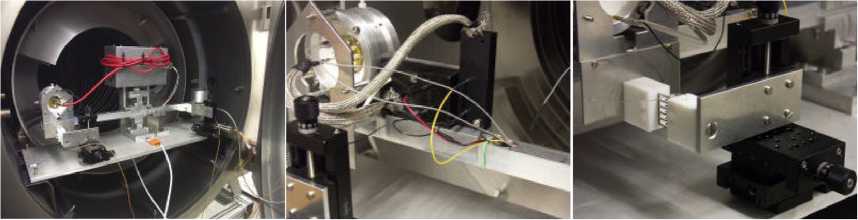
Рис. 19. Фотографическое изображение стенда и его узлов: а – стенд в вакуумной камере; б – двигатель в составе стенда; в – калибровочные электроды
Fig. 19. A photographic image of the stand and its components: a – a stand in a vacuum chamber; б – an engine as part of the stand; в – calibration electrodes демпфированием и временем отклика в десятки секунд, то шум при считывании тяги практически отсутствует на частотах выше 0,1 Гц. Ключевой элемент стенда – оптический датчик, который реагирует только на вращение торсионного стержня, но не на окружающую вибрацию. На рис. 20 представлена схема стенда.
Для измерения вращения торсионного стержня применялся оптический интерферометр. Световозвращатель «P» (рис. 20) имеет отверстие диаметром 2,54 см. Луч (1) представляет собой непрерывный пучок мощностью 5 мВт, длиной волны 532 нм. Торсионный стержень подвешен на стальном волокне диаметром 254 мкм в точке «S». Микродвигатель создает тягу в точ- – 229 –
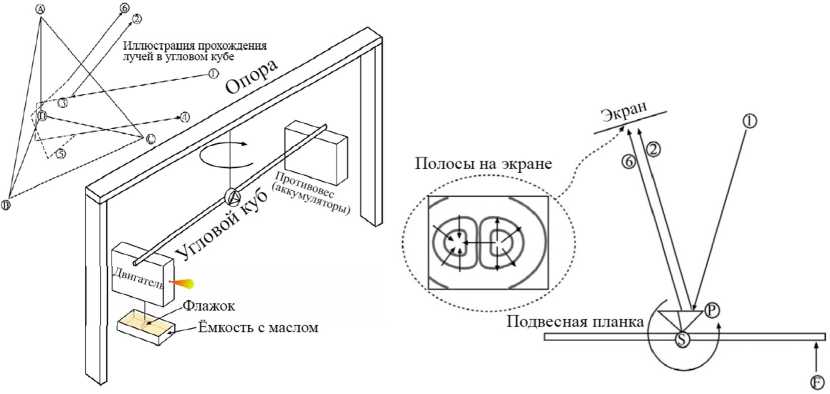
Рис. 20. Схема стенда, угловой куб и схема измерения
Fig. 20. The scheme of the stand, the angular cube and the measurement scheme ке «F». Световозвращающая призма «Р» из цельного стекла (угловой куб) крепится к планке в центре. Луч (1) ударяется об угловой куб и создает два отраженных луча (2) и (6). Начальный угол между лучом (1) и балками (2) и (6) регулируется примерно на 30 мрад для оптимизации работы датчика. Они интерферируют на экране, создавая полосы, показанные на вставке. При вращении эти полосы перемещаются радиально наружу (показано стрелками на вставке) или внутрь, в зависимости от направления вращения стержня.
В источнике [24] представлена информация о работе тягового стенда торсионного типа. Стенд обладает грузоподъемностью до нескольких килограммов и способен измерять импульсную нагрузку до 1350 мкН·с с разрешением 0,47 мкН·с и среднюю тягу до 264 мкН с разрешением 0,09 мкН. Схема упорного стенда показана на рис. 22. Корпус изготовлен из алюминиевого прямоугольного блока размером 27 × 3 × 6 см. Маятник подвешен на вольфрамовой нити длиной 1160 мм и диаметром (502,0 ± 6,1) мкм. Постоянная пружины кручения нити составляет K = 8,47·10–4 Нм/рад. Верхний конец нити соединен с вращающимся вакуумным каналом, закрепленным в верхней части вакуумной камеры, который используется для регулировки начальной амплитуды и положения маятника. Нижний конец нити прикреплен к специально сконструированному зажиму (см. рис. 21).
На одном конце маятника установлен пульсирующий плазменный двигатель (ППД), ось сопла выровнена так, чтобы она была касательной к вращательному движению маятника. Когда двигатель приводится в действие, маятник реагирует вращением вокруг оси волокна. Три спиральные пружины, изготовленные из алюминиево-кремниевых проволок длиной 40 мм и диаметром 50 мкм каждая, соединены с центром маятника от нижней плоскости, которые используются для подачи питания и трансляции сигнала зажигания для ППД. Таким образом, в нити отсутствует рабочий ток, что позволяет избежать ее термоупругости при кручении. Эквивалентная жесткость проводящих пружин на кручение, измеренная путем сравнения периодов маятника до и после подсоединения трех проводов, оказывается меньше одной тысячной – 230 –
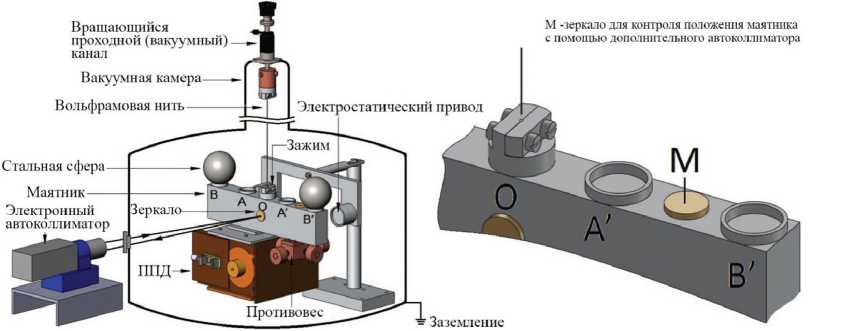
Рис. 21. 3Д-модель стенда и узла крепления вольфрамовой нити
Fig. 21. 3D-model of the stand and the fastening unit of the tungsten thread жесткости волокна и остается почти постоянной при нескольких повторяющихся измерениях. На противоположной стороне ППД установлен медный противовес весом 850 г, чтобы уравновесить вес двигателя и отрегулировать положение маятника. Для изменения момента инерции маятника на него надеваются две стальные сферы диаметром 57 мм и массой ≈780 г.
В источнике [25] представлен торсионный стенд для измерения тяги двигателей от 100 мН до 4,5 Н. Конструкция стенда включает в себя шарниры без трения, моментный рычаг, противовес и лазерный триангуляционный датчик перемещения для компенсации помех окружающей среды. Удлиненный моментный рычаг стенда позволяет оценить тягу двигателей уровня 100 мН, в то время как укороченный моментный рычаг позволяет оценить большие диапазоны тяги. Баланс тяги использовался для измерения установившихся и пульсирующих характеристик двигателя на холодном газе мощностью 100 мН. Было установлено, что максимальная погрешность измерения тяги в установившемся режиме и в пульсирующем режиме составляет 5,4 мН и 7,9 мН соответственно. Фотографическое изображение стенда представлено на рис. 22.
Для тестирования пульсирующих плазменных двигателей (ППД) и других ЭРД малой тяги был разработан стенд на основе крутильного маятника [26]. Текущая конфигурация способна измерять импульсные разряды в диапазоне от 14 до 79 мкН·с с разрешением от 0,05 до 0,10 мкН·с. Использование изгибных шарниров с низкой жесткостью делает весы компактными с меньшей длиной рычага. Для калибровки стенда было спроектировано и изготовлено электростатическое калибровочное устройство (ECD). Достигнутая максимальная погрешность измерения импульсного разряда составила 10 %, что ниже среднего значения в 12–15 %, типичного для этого типа балансиров тяги. ECD был откалиброван с использованием ранее откалиброванной прецизионной аналитической шкалы. Конструкция стенда представлена на рис. 23.
Рычаг упорных весов состоит из квадратной алюминиевой трубки со стороной 76 мм и длиной 550 мм. Этот рычаг прикреплен к немагнитной опорной раме из нержавеющей стали с помощью двух поворотных шарниров, образуя конфигурацию крутильного маятника.
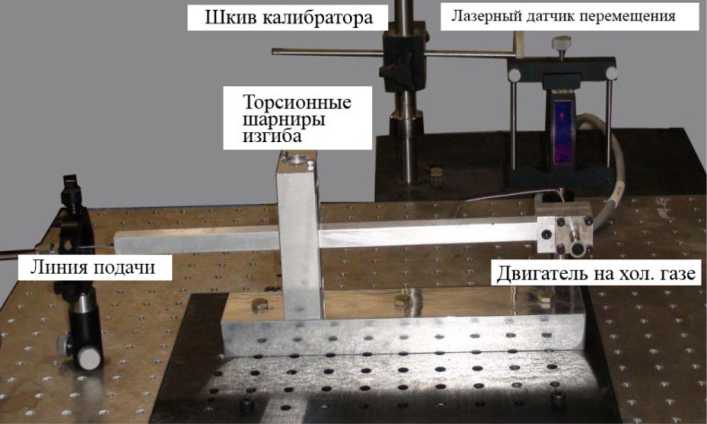
Рис. 22. Торсионный стенд тяги
Fig. 22. Traction torsion stand
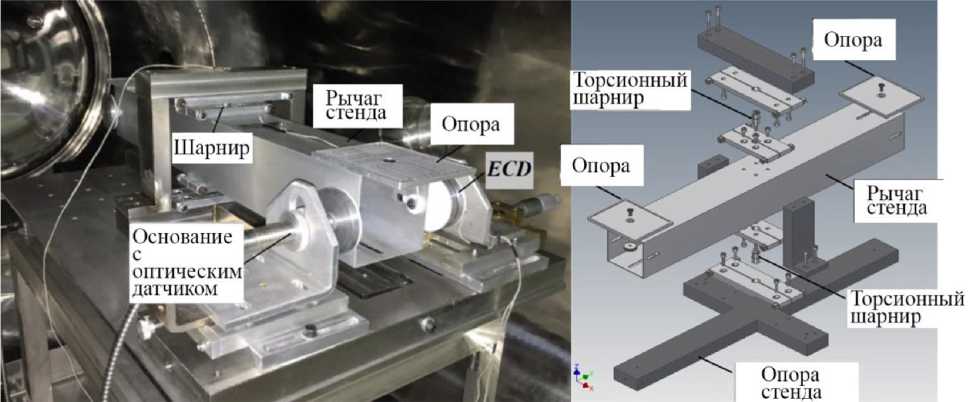
Рис. 23. Фотографическое изображение стенда и его взрыв-схема
Fig. 23. Photographic image of the stand and its explosion-schema
В патенте [27] представлено тягоизмерительное устройство (ТИУ) на основе торсионного маятника. Предлагается способ измерения боковой составляющей вектора тяги, основанный на том, что размещают ЭРД на одном конце подвижной системы ТИУ, осуществляют прокладку линий электропитания ЭРД по подвижной системе ТИУ с подведением к нему гибких частей этих линий. Затем включают ЭРД и снимают показания датчика боковых усилий. После этого отключают ЭРД и устанавливают его на неподвижно закрепленный сменный кронштейн рядом с предыдущим местом его размещения. Производят совмещение оси ЭРД с его осью при предыдущем размещении на подвижном коромысле, подводят к ЭРД дополнительные гибкие линии электропитания, соединяют их с концами линий, проложенных по подвижной системе ТИУ. Затем совмещают положение подвижной системы ТИУ с ее положением при первичном размещении на нем ЭРД, после чего повторно включают ЭРД. Величина боковой составляю-– 232 – щей вектора тяги ЭРД определяется разностью показаний датчика боковых усилий при первом и повторном включении.
Устройство для реализации данного способа включает в себя подвижную систему ТИУ, выполненную в виде горизонтально расположенного и подвешенного на упругом на кручение подвесе подвижного коромысла, на котором при первом включении первоначально размещен ЭРД, линии электропитания ЭРД, проложенные по коромыслу и имеющие гибкие участки в месте перехода с подвижной системы ТИУ на неподвижную часть ТИУ, датчик бокового усилия (рис. 24).
Позициями на рис. 24 обозначены: 1 – подвес; 2 – коромысло; 3 –ЭРД; 4 – противовес; 5 – линии электропитания и газовые линии; 6 – гибкие участки линий; 7 – неподвижная часть стенда; 8 – датчик бокового усилия; 9 – узел стыковки; 10 – сменный кронштейн; 11 – гибкие линии электропитания ЭРД; 12, 13 – платы; 14 – парные связки линий; 15 – газовые линии.
В источнике [28] представлен стенд, аналогичный стендам из источников [3], [5] и [18]. Тяговый стенд предназначен для точного измерения импульсных разрядов в диапазоне 10–1000 мкН·с с использованием бесконтактного метода электромагнитной калибровки. В частности, конструкция с постоянным магнитом была спроектирована для создания однородного магнитного поля, а многовитковая катушка была изготовлена для создания калибровочного усилия менее 10 мН. Электромагнитная калибровочная сила для измерения импульсной тяги была линейной по отношению к току катушки и изменялась менее чем на 2,5 % при изменении расстояния на 6 мм между катушкой и магнитом. ППД был сначала протестирован на испытательном стенде, а затем были измерены пять одиночных импульсных разрядов, чтобы получить средний импульсный разряд в 310 мкН·с. Для оценки качества измерения была проанализирована неопределенность измеренного одиночного импульса и было установлено, что она составляет 10 мкН·с с достоверностью 95 %. Стенд представлен на рис. 25.
Стенд можно разделить на пять основных частей: рычаг кручения, шарниры изгиба, стационарная конструкция, датчик перемещения и электромагнитная калибровочная система (EMCS).
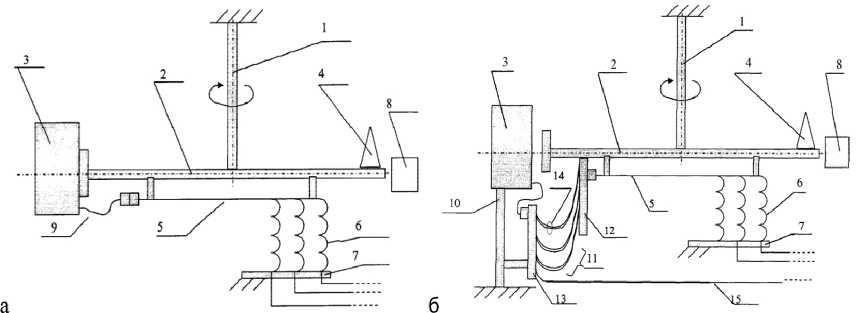
Рис. 24. Схема стенда: а) схема ТИУ, соответствующая установке ЭРД на подвижную систему ТИУ при первом включении ЭРД; б) схема ТИУ, соответствующая установке ЭРД на сменном кронштейне при повторном включении ЭРД
Fig. 24. The scheme of the stand: a) the scheme of the stand corresponding to the installation of the thruster on the mobile stand system when the thruster is switched on for the first time; b) the scheme of the stand corresponding to the installation of the thruster on a replaceable bracket when the thruster is switched on again

Рис. 25. Фотографическое изображение стенда и его узлов
Fig. 25. Photographic image of the stand and its components
В работе [29] представлен стенд для измерения импульсной тяги сегнетоэлектрического плазменного двигателя (FEPT). Характеристики такого двигателя включают среднюю мощность 6 Вт, тягу 68–87 мкН, расчетный удельный импульс 1450 с и массу двигателя 5,7 г. Дополнительные преимущества двигателя включают в себя импульсные разряды менее 1 нН·с, для работы требуется только один источник питания и способность испускать как электроны, так и ионы. Объем и масса двигателя относительно невелики, необходимо два провода от источника питания, расположенного снаружи камеры, к двигателю. На одном оптическом макете размером 6×4 дюйма смонтированы двигатель, поворотный рычаг и интерферометр Майкель-сона. Схема упорного стенда и его фотография показаны на рис. 26. Лазер HeNe, диодный детектор и расширитель луча были расположены снаружи камеры, в то время как остальная часть упорного стенда была установлена на макетной плате. Функция интерферометра заключалась
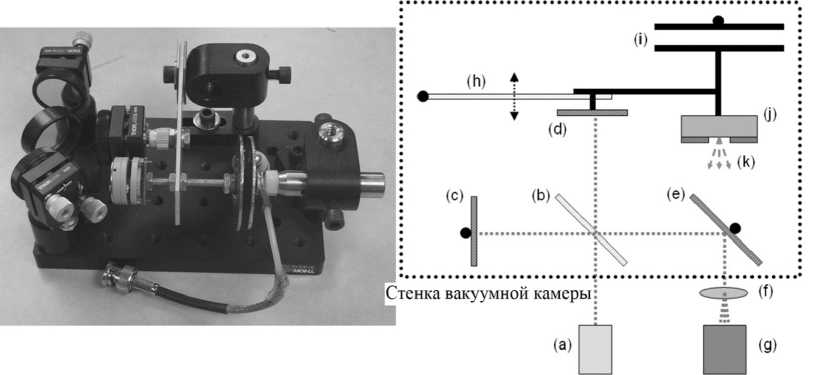
Рис. 26. Фотографическое изображение стенда и его схема: (а) HeNe-лазер; (b) разделитель 50/50; (c) контрольное зеркало на ножке; (d) измерительное зеркало на ножке; (e) зеркало; (f) расширитель луча; (g) диодный детектор; (h) маятник; (i) калибровочные пластины; (j) FEPT; (k) плазменный шлейф
Fig. 26. Layout of the thrust stand. (a) HeNe laser. (b) 50–50 splitter. (c) Reference leg mirror. (d) Measurement leg mirror. (e) Mirror. (f) Beam expander. (g) Diode detector. (h) Pendulum. (i) Calibration plates. (j) FEPT. (k) Plasma plume.
в преобразовании перемещений качающегося рычага в электрический сигнал. Зеркало было установлено на кронштейне в дополнение к двум отдельным источникам импульсов: калибровочному генератору импульсов и FEPT. Калибровочный генератор импульсов состоит из двух параллельных металлических дисков: один заземлен, а другой присоединен к генератору импульсов переменной ширины напряжением 0–500 В.
Обсуждение результатов
Представленные конструкции стендов можно систематизировать по времени публикации, уровню и типу (стационарный или импульсный режим) измеряемой тяги, типу применяемого датчика регистрации смещения чувствительного элемента, способу демпфирования паразитных колебаний, типу калибровки стенда и оцениваемой погрешности измерения тяги. Данные сведены в табл. 1. Концепция торсионных маятников как измерителей тяги родилась в 1970х годах. Сам метод имеет ещё более раннее происхождение и реализован в виде весов Ка-
Таблица 1. Систематизация рассмотренных конструкций стендов
Table 1. Systematization of the considered stand designs
|
Год |
Публ. |
Изм. уровень тяг |
Тип датчика |
Демпфирование |
Тип калибровки |
Δ, % |
|
1971 |
[16] |
4.4–445 мкН 0.445–8.9 мН 8.9–222 мН |
Ёмкостный |
Электромагнитное Вихретоковое |
Электромагнитный (калибровочная катушка) |
4.5 |
|
1982 |
[21] |
100–200 мкН |
Датчик крутящего момента |
- |
LVDT с нулевым методом |
17 |
|
1995 1997 |
[15, 18] |
Имп. до 266 мкН·с, уст. 570 мкН |
LVDT |
Электромеханический |
Качающийся ударный маятник |
1 |
|
1997 |
[13] |
Имп. 100 мкН·с – 10 Н·с, уст. 20 мкН |
Лазерный интерферометр |
Резиновые опоры |
Качающийся ударный маятник |
2 |
|
2000 |
[20] |
1–100 мкН |
Оптический (лазерный рычаг) |
- |
По периоду колебания известного веса |
3 |
|
2001 |
[11] |
Имп. 1 мкН·с Уст. 1 мкН |
LVDT |
Электромагнитное |
Калибровочный молот |
10 |
|
2002 |
[2] |
до 86.2 нН 712 нН-1 мкН |
LVDT |
Масляное |
Численное моделирование |
±11 ±2 |
|
[12] |
1–100 мкН |
Автоколлима-тор |
Вихретоковое |
Электростатика |
- |
|
|
[17] |
5–75 мкН |
LVDT |
Электромагнитное |
Калибровочные грузы |
±1.3 |
|
|
2003 |
[5] |
Уст.2–13 мкН Имп. до 19 мкН·с |
LDS |
Электростатическое |
Электростатика |
- |
|
2004 |
[3] |
Имп. 80–300 мкН·с |
LVDT |
Электромагнитное |
Качающийся ударный маятник |
2.6 |
|
2005 |
[22] |
2–50 мкН |
Оптический |
Электростатическое |
Электростатика |
7–10 |
Продолжение таблицы 1
Table 1 continued
При калибровке широко используются численные методы моделирования электростатических сил. В источнике [2] калибровка проведена численным моделированием газодинамического истечения гелия через калибровочное отверстие. Погрешности измерения тяги стендом находятся в диапазоне 0,16–20 %. Большая погрешность характерна для стендов измерения тяги уровнем до 1 мкН. С увеличением реактивной силы микродвигателя погрешность стендового измерения тяги уменьшается.
Заключение
В статье представлено 23 конструкции стендов торсионного типа для измерения тяги микродвигателей малых космических аппаратов. Данное количество составляет абсолютное большинство существующих конструкций подобного принципа работы. Достоинством торсионных стендов принято считать точность измерения тяги, так как данный способ наиболее близок к непосредственному определению реактивной силы. Недостатки стендов данной конструкции заключаются в ориентированности на конкретный изучаемый двигатель (что не позволяет проводить лабораторные исследования различных конструкций двигателей), больших массогабаритных характеристиках, обязательность калибровки, сложность подвода рабочего тела и электрической мощности, чувствительность к электромагнитным воздействиям.
Список литературы Обзор известных силовых способов измерения реактивной тяги ионных двигателей: торсионные маятники
- Yoshikawa T., Tsukizaki R., Kuninaka H. Calibration methods for the simultaneous measurement of the impulse, massloss, and average thrust or a pulsed plasma thruster, Review of Scientific Instruments, 2018, 89(9), 095103–1 – 095103–10
- Jamison A. J., Ketsdever A. D., Muntz E. P. Gas dynamic calibration of a nano-Newton thrust stand, Review of Scientific Instruments, 2002, 73(10), 3629–3637
- Koizumi H., Komurasaki K., Arakawa Y. Development of thrust stand for low impulse measurement from microthrusters, Review of Scientific Instruments, 2004, 75 (10), 3185–3190
- Soni J., Roy S. Design and characterization of a nano-Newton resolution thrust stand, Review of Scientific Instruments, 2013, 84(9), 095103–1 – 095103–9
- Gamero-Castano M. A torsional balance for the characterization of microNewton thrusters, Review of Scientific Instruments, 2003, 74(10), 4509–4514
- Chuansheng Wang, Changbin Guan, Xuhui Liu, Xudong Wang, Fei Li, Xilong Yu. Dynamic-force extraction for micro-propulsion testing: Theory and experimental validation, Review of Scientific Instruments, 2018, 89(11), 115110–1 – 115110–8
- Zhou W. J., Hong Y. J., Chang H. A micronewton thrust stand for average thrust measurement of pulsed microthruster, Review of Scientific Instruments, 2013, 84(12), 125115–1 – 125115–9
- Ning Z. X., FAN J. R. On line measurement method of three-wire torsion pendulum micro thrust and analysis of its uncertainty, Measurement & Control Technology, 2012, 31 (5), 45–48
- Yang J, Liu X.-C., Wang Y.-Q., Tang M.-J., Luo L.-T., Jin Y.-Z., Ning Z.-X. Thrust measurement of an independent microwave thruster propulsion device with three-wire torsion pendulum thrust measurement system, Journal of Propulsion Technology, 2016, 37(2), 362–371
- Li D., Zhang W, Zhang T., Guo N., Meng W., Tang W., Tang F., Yang F. Ground integrated test and evaluation technology for space electric propulsion, Vacuum and Cryogenics, 2017, 23(5), 266–273
- Ziemer J. Performance Measurements Using a Sub-Micronewton Resolution Thrust Stand, 27th International Electric Propulsion Conference, AIAA Paper, 2001, 0238
- Merkowitz S. M., Maghami P. G., Sharma A., Willis W. D., Zakrzwski C. M. A μNewton thrust-stand for LISA, Classical and Quantum Gravity, 2002, 19(7), 1745–1750
- Cubbin E. A., Ziemer J. K., Choueiri E., Jahn R. G. Pulsed thrust measurements using laser interferometry, Review of Scientific Instruments, 1997, 68(6), 2339–2346
- Fowles G. R. Introduction to Modern Optics. Dover, New York: Courier Corporation, 1989. 328
- Haag Thomas W. Thrust stand for pulsed plasma thrusters, Review of Scientific Instruments, 1997, 68(5), 2060–2067
- Stark K. W., Dennis T., McHugh D. and Williams T. Design and development of a micropound extended range thrust stand (MERTS). NASA Technical Note D‑7029, August 1971
- Dulligan M., Lake J., Adkison P. and Spanjers G. Resonant Operation of a MicroPropulsion Thrust Stand, American Institute of Aeronautics and Astronautics 38th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit – Indianapolis, Indiana, 2002, 3821–1 – 3821–9
- Haag T. PPT Thrust Stand, Prepared for the 31st Joint Propulsion Conference and Exhibit cosponsored by AIAA, ASME, SAE, and ASEE San Diego, California, 1995, 1–12
- Вавилов И. С., Ячменев П. С., Федянин В. В., Степень П. В., Лукьянчик А. И., Жариков К. И. Определение тяги ионного двигателя резонансным аэродинамическим методом (РАМ‑методом), Динамика систем, механизмов и машин, 2021, 9(2), 70–77 [Vavilov I. S., YAchmenev P.S., Fedyanin V. V., Stepen’ P.V., Luk’yanchik A.I., ZHarikov K. I. Determination of the thrust of an ion thruster by the resonant aerodynamic method (RAM‑method), Dynamics of systems, mechanisms and machines, 2021, 9(2), 70–77 (in Rus.)]
- Boccaletto L., d’Agostino L. Design and Testing of a Micro-Newton Thrust Stand for FEEP, 36th AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit, 2000, 3268
- Murakami H., Hirata M., Kudo I. Thrust movement of an ion engine system, Journal of Spacecraft and Rockets, 1984, 21(1), 96–100
- Marhold K., Tajmar M. Micronewton thrust balance for indium FEEP thrusters, 41st AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, 2005, 4387
- Phipps C. R. et al. A Low‐Noise Thrust Stand for Microthrusters with 25nN Resolution, AIP Conference Proceedings. – American Institute of Physics, 2006, 830(1), 492–499
- Yang Y.-X., Tu L.-C., Yang S.-Q., Luo J. A torsion balance for impulse and thrust measurements of micro-Newton thrusters, Review of Scientific Instruments, 2012, 83(1), 015105
- Flores J., Ingle M., Robinson N., Choudhuri A. Development of a Torsional Thrust Balance for the the performance evaluation of 100mN‑5N class thrusters, 47th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, 2011, 6016
- Anselmo M. R., Marques R. I. Torsional thrust balance for electric propulsion application with electrostatic calibration device, Measurement Science and Technology, 2019, 30(5), 055903
- Грачев В. С., Салин В. Л., Шпанов И. Г., Шутов В. Н. Федеральное государственное унитарное предприятие «Исследовательский Центр имени М. В. Келдыша». Способ измерения боковой составляющей вектора тяги электрореактивного двигателя и устройство для его осуществления. Патент№ 2363932 C 1 РФ, МПКG01L 5/13. № 2008114547/28; заявл. 17.04.2008; опубл. 10.08.2009. [Grachev V. S., Salin V. L., Shpanov I. G., Shutov V. N. Federal'noe gosudarstvennoe unitarnoe predprijatie «Issledovatel'skij Tsentrimeni M. V. Keldysha». Method for measurement of lateral component of elecrojet engine thrust vector and device for its realization. Patent No. 2363932 C 1 of the Russian Federation, IPC G01L 5/13. No. 2008114547/28; application 17.04.2008; publ. 10.08.2009.(in Rus.)]
- Tang H., Shi C., Zhang X., Zhang Z., Cheng J. Pulsed thrust measurements using electromagnetic calibration techniques, Review of Scientific Instruments, 2011, 82(3), 035118.
- Kemp M. A., Kovaleski S. D. Thrust Measurements of the Ferroelectric Plasma Thruster, IEEE Transactions onPlasmaScience, 2008, 36(2), 356–362
