Обзор методов оптимизации траекторий космических аппаратов с использованием дискретных множеств псевдоимпульсов

Автор: Улыбышев Юрий Петрович
Журнал: Космическая техника и технологии @ktt-energia
Рубрика: Динамика, баллистика, управление движением летательных аппаратов
Статья в выпуске: 4 (15), 2016 года.
Бесплатный доступ
Представлен обзор новых методов оптимизации траекторий космических аппаратов с непрерывной тягой. Методы основаны на дискретизации траектории по времени полета на малые сегменты и на близкие к равномерной дискретной аппроксимации направления вектора тяги множеством псевдоимпульсов с ограничением их неравенством на каждом сегменте. Задача оптимизации - минимизация суммарной характеристической скорости. Оптимальный импульс на каждом сегменте может быть представлен как сумма ненулевых псевдоимпульсов с ограничением их суммарной характеристической скорости. Терминальные условия представляются как линейное матричное уравнение. Матричное неравенство на суммы всех псевдоимпульсов используется для преобразования задачи в форму линейного программирования высокой размерности. Непрерывные маневры включают наборы смежных сегментов, и требуется обработка решений линейного программирования для формирования последовательности маневров. Оптимальное число маневров определяется автоматически. Методы обеспечивают гибкие возможности расчета траекторий сложных миссий с различными требованиями и ограничениями. Представлен обзор примеров оптимизации траекторий космических аппаратов различных типов. Обсуждаются преимущества этих методов.
Оптимизация траекторий космических аппаратов, использование линейного программирования, обзор
Короткий адрес: https://sciup.org/14343539
IDR: 14343539 | УДК: 629.78.076.6
Review of spacecraft trajectory optimization methods using discrete sets of pseudoimpulses
A review of new methods for continuous thrust spacecraft trajectory optimization is presented. The methods are based on a trajectory discretization by small segments and on a near-uniform discrete approximation of thrust directions by a set of pseudoimpulses with an inequality constraint for each segment. The optimization problem is to minimize the total characteristic velocity. The optimal impulse in each segment can be presented by the sum of non-zero pseudoimpulses with a constraint on the total characteristic velocities of the pseudoimpulses. The terminal conditions are presented as a linear matrix equation. A matrix inequality on the sums of the pseudoimpulses is used to transform the problem into a large-scale linear programming form. The continuous burns include a number of adjacent segments and a post-processing of the linear programming solutions is needed to form a sequence of the burns. An optimal number of the burns is automatically determined. The methods provide flexible opportunities for the trajectory computation in complex missions with various requirements and constraints. Summary of application examples of trajectory optimization for different spacecraft types is presented. Advantages of the methods are discussed.
Текст научной статьи Обзор методов оптимизации траекторий космических аппаратов с использованием дискретных множеств псевдоимпульсов
Оптимизация траекторий космических аппаратов (КА) является предметом интенсивных исследований [1–8]. Имеется два основных типа методов оптимизации траекторий: непрямые и прямые, или их комбинации. Непрямые методы приводятся к решению двухточечной краевой задачи на основе принципа максимума Л.С. Понтрягина [6, 8]. В такой краевой задаче неизвестными являются сопряженные переменные, которые имеют высокую чувствительность и затруднения в поиске начального приближения. Прямые методы преобразуют задачу к форме параметрической оптимизации, которая решается, как правило, с помощью нелинейного программирования [8].
Автором совместно с А.В. Соколовым был разработан метод расчета оптимальных многовитковых межорбитальных перелетов с малой тягой на околокруговых орбитах с использованием трансверсальных маневров ограниченной продолжительности [3]. Метод использует классическое линейное программирование. В основе его математического представления лежит расширение пространства управляемых переменных за счет введения трансверсальных псевдоманевров противоположных направлений. Число неизвестных переменных при этом достигало нескольких сотен. Наиболее известным методом решения задач линейного программирования является симплекс-метод, однако он не обладает полиномиальной сходимостью, и его использование для задач высокой размерности (десятки, сотни тысяч переменных) затруднительно.
В 1990-е гг. линейное программирование претерпело революционные изменения, связанные с разработкой алгоритмов с полиномиальной сходимостью, известных как алгоритмы внутренней точки [9], которые обеспечивают более высокую эффективность, чем классический симплекс-метод. Это дало возможность разработки методов оптимизации траекторий КА с использованием линейного программирования высокой размерности. Рассматриваемые методы основаны на двух идеях. Первая — хорошо известная дискретизация траектории на малые сегменты. Вторая идея является ключевой и основана на близкой к равномерной дискретной аппроксимации пространства управления (т. е. направления и величины тяги) множеством псевдоимпульсов с ограничением в виде неравенства для каждого сегмента. Статья является обзором работ автора [10–21], в которых разработаны новые методы оптимизации траекторий различных типов КА.
Базовый метод для задач без ограничений
Движение КА представляется в виде точечной массы, имеющей ограниченную силу тяги, направленную по единичному вектору е ( e T ⋅ e ≡ 1). Уравнения движения КА:
d Y dt
= f [Y, P(t), M(t), e(t), t], где YT(t) = [rT(t), VT(t)] — вектор состояния КА; r(t), V(t) — радиус-вектор и вектор скорости, соответственно; t — время; P — сила тяги; M — масса КА. Краевые условия для траектории: F[Y(tf)] = Pf, где tf — заданное время перелета и Pf — вектор целевых значений размерностью s.
Предположим, что интервал перелета КА [0, tf ] разбит на n малых, в общем случае неодинаковых и/или неявно заданных, сегментов ∆ ti = ti + 1 – ti , и известны приближенные значения функции F ( ti ) в опорные моменты времени ti . Считаем, что на каждом сегменте сила тяги P ( ti ) и ее ориентация e ( ti ) постоянны, тогда для краевых условий можно записать приближенное соотношение:
n
Pf( tf) = p*( tf) + z i - 1
d F ( t ) P ( t ) e ( t ) Nt
∂ a m
г
=p;( tf)+z a( t)a t., f f i-i da i i где Pf*(tf) — значение краевых условий на невозмущенной траектории КА в момент tf; dF/da — матрица частных производных; a — вектор реактивного ускорения.
При ориентации вектора тяги в некоторой плоскости на любом сегменте i его направление может быть произвольным, и время работы двигателя не должно превышать длительности этого сегмента A t , , а приобретаемый на этом сегменте импульс скорости будет не более A V max = a p max A t ( a p max — максимальное ускорение тяги). Возможные направления вектора тяги представим в виде дискретного набора ориентаций, образованного делением диапазона [0, 2п] на малые углы Аф = 2п/ к (рис. 1, а), где к — число псевдоимпульсов. В оптимальном решении не может быть более двух ненулевых смежных псевдоимпульсов, поскольку сумму несмежных псевдоимпульсов всегда можно заменить двумя смежными псевдоимпульсами, имеющими наименьшую сумму (рис. 1, б) [10].
Тогда оптимальный импульс можно представить суммой k AV. f = ЕАVjе(j i opt 1 i i с ограничением на сумму характеристических скоростей псевдоимпульсов j = k ∑ ∆Vi( j ) ≤ 1. j = 1
Оптимальный импульс будет суммой ближайших псевдоимпульсов (рис. 1, б).
Подобным образом можно рассмотреть пространственный случай [10, 13].
Для вектора неизвестных неотрицательных переменных размерностью ( n х к )
Хт = [А V (1) , А V <2, ..., А V*
АV(1), АV(2), .... АV(k>, .... АVnk>], включающего все псевдоимпульсы на всех сегментах, можно записать линейное неравенство:
A X ≤ b , (1)
где А — матрица размерностью n х( n х к ) (показаны только ненулевые элементы):
1 11...1 2 k
A =
111...1
k
n.
111...1 k n×k
Вектор b T = [ А V lm ax , А V 2_max , А V^ .... A V n -1max , A V n max ] имеет размерность n . Краевые условия примут вид
A P f = P f - Р * = A e X , (2)
где А е — матрица размерностью s х( n х к ):
|
' д F 1 |
д F 1 |
д F 1 |
д F 1 |
д F 1 |
д F 1 |
д F 1 |
д F 1 |
д F 1 " |
||
|
д V (1) |
д V (2) |
д V ( k ), |
д V 2 1 ) |
д v < 2) |
дv < k ) , |
д V (1) 1 n |
д V (2) n |
д f ( k ) n 3 |
||
|
k |
k |
k |
||||||||
|
д F 2 |
д F 2 |
д F 2 |
д F 2 |
д F 2 |
д F 2 |
д F 2 |
д F 2 |
д F 2 |
||
|
A = |
14 |
дv(2) |
д ^ 3) |
д v 2 (1) |
► • д v ( 2) |
> • • д V 2 ( 3 k ) |
• • д v (1) 1 n |
► • д V (2) n |
д F ( k ) n 3 |
. (3) |
|
e |
k |
k |
2 k |
|||||||
|
д F s |
д F s |
д F s |
д F s |
* * * • д F s |
1 д F s |
► • д F s |
* * * • д F s |
д F s |
||
|
д V (1) |
д v (2) |
д V 3 |
д V(1) |
► • д V(2) |
• • • д V 2k) |
► • д V (1) n |
► • д V (2) n |
“ д F ( к ) n |
||
|
L 1 |
k |
k |
k |
3 J |
Минимизируемой функцией является суммарная характеристическая скорость. Определим вектор коэффициентов qT = [1 1…1 1] из ( nхк ) элементов для равномерных сегментов (все элементы равны 1). Тогда проблему оптимизации траектории можно сформулировать как задачу классического линейного программирования: найти вектор Х , минимизирующий линейный функционал J = min( qT · X )
при линейных ограничениях в виде неравенства (1), равенства (2) и неотрицательных значениях всех элементов вектора Х : 0 < А V ( j < A V max . В подобной формулировке задача имеет весьма высокую размерность. Однако, по своей структуре матрица А является разряженной, и современное программное обеспечение, например MATLAB ® , имеет эффективные алгоритмы вычислений с разряженными матрицами.
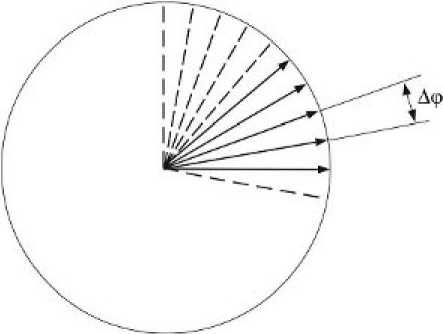
а)
Рис. 1. Псевдоимпульсы в плоскости: а — возможные ориентации; б — оптимальные ориентации
11сдопустимая

б)
Формально при решении задач с дискретизацией траектории по времени каждый сегмент рассматривается независимо от других, поэтому полученное решение требует специальной обработки. Критерием включения в обработку является наличие ненулевых компонент вектора Х . При этом для выбранных компонент вектора Х , относящихся к одному сегменту, уточняется ориентация вектора тяги и ее суммарный уровень. Далее в непрерывные маневры объединяются все последовательности смежных сегментов с ненулевым уровнем тяги. Таким образом может быть получен конечный набор непрерывных маневров. Рис. 2 иллюстрирует этот процесс.

Рис. 2. Обработка решений линейного программирования
Оптимизация траекторий с ограничениями
Реальные траектории КА часто требуют удовлетворения не только терминальных условий, но также и некоторых специфических требований. Например, могут иметься следующие ограничения:
-
• ограничения для внутренних точек траектории в форме краевых условий или неравенств;
-
• ограничения, связанные с суммарным временем работы двигателей на некоторых подинтервалах;
-
• ограничения или предпочтительность по направлениям силы тяги, интервалам маневрирования;
-
• могут использоваться многорежимные двигательные установки с высокой, средней и/или малой тягой;
-
• другие операционные ограничения.
В представленных методах очень важно наличие гибких возможностей по расчету и проектированию оптимальных траекторий с различными требованиями и ограничениями. Для таких комплексных случаев необходимо расширение и/или модификация базовой формы (т. е. преобразование матриц А , Ае , вектора весовых коэффициентов q , множества сегментов и/или множеств псевдоимпульсов) [13].
Каждое ограничение в виде равенства F IPT [ Y ( tf IPT )] = P IPT размерностью l во внутренней точке траектории требует l дополнительных строк в матрице Ae (3). Ограничения неравенства требуют расширения матрицы А [13].
Список литературы Обзор методов оптимизации траекторий космических аппаратов с использованием дискретных множеств псевдоимпульсов
- Гродзовский Г.Л., Иванов В.А., Токарев В.В. Механика космического полета с малой тягой. М.: Наука, 1966. 704 с.
- Лебедев В.Н. Расчет движения космического аппарата с малой тягой. Математические методы в динамике полета. Вып. № 5. М.: Вычислительный центр АН СССР, 1965. 108 с.
- Улыбышев Ю.П., Соколов А.В. Многовитковые маневры с малой тягой в окрестности геостационарной орбиты//Известия РАН. Теория и системы управления. 1999. Т. 18. № 2. С. 95-101.
- Петухов В.Г. Оптимизация многовитковых перелетов между некомпланарными эллиптическими орбитами//Космические исследования. 2004. Т. 42. № 3. С. 260-279.
- Попов Г.А., Константинов М.С., Петухов В.Г. Проектирование межорбитального перелета космического аппарата с маршевыми электроракетными двигательными установками//Вестник РФФИ. 2006. № 3(47). С. 16-30.
- Салмин В.В., Ишков С.А., Старинова О.Л. Методы решения вариационных задач механики космического полета с малой тягой. Самара: СНЦ РАН, 2006. 162 с.
- Синицын А.А. Исследование эффективности использования маршевой электроракетной двигательной установки для выведения космического аппарата на геостационарную орбиту//Космонавтика и ракетостроение. 2009. № 4(57). С. 95-108.
- Wright M.H. The interior-point revolution in optimization: history, recent developments, and lasting consequences//Bulletin of the American Mathematical Society. 2004. Vol. 42. № 1. P. 39-56.
- Ulybyshev Y. Continuous thrust orbit transfer optimization using large-scale linear programming//Journal of Guidance, Control, and Dynamics. 2007. Vol. 30. № 2. P. 427-436.
- Улыбышев Ю.П. Оптимизация многорежимных траекторий сближения с ограничениями//Космические исследования. 2008. Т. 46. № 2. С. 133-147.
- Улыбышев Ю.П. Концепция множеств псевдоимпульсов для оптимизации траекторий космических аппаратов//Полет. 2008. № 2. С. 52-60.
- Ulybyshev Y. Spacecraft trajectory optimization based on discrete sets of pseudo -impulses//Journal of Guidance, Control and Dynamics. 2009. Vol. 32. № 4. P. 1200-1217.
- Ulybyshev Y. Discrete pseudocontrol sets for optimal control problems//Journal of Guidance, Control and Dynamics. 2010. Vol. 33. № 4. P. 1133-1142.
- Ulybyshev Y. Optimal rendezvous trajectories as a function of thrust-to-weight ratio//AIAA Astrodynamics Specialist Conference, Toronto, Ontario, AIAA Paper 2010-7663, 2010. 15 p.
- Ulybyshev Y. Trajectory optimization for spacecraft proximity operations with constraints//AIAA Guidance, Navigation, and Control Conference, Portland, OR, AIAA Paper 20117663, 2011. 15 p.
- Улыбышев Ю.П. Оптимизация межорбитальных перелетов с малой тягой при ограничениях//Космические исследования. 2012. Т. 50. № 5. С. 403-418.
- Ulybyshev Y. Stationkeeping strategy and possible lunar halo orbits for long-term space station//AIAA Guidance, Navigation, and Control Conference, National Harbor, MR, AIAA Paper 2014-0274, 2014. 15 p.
- Ulybyshev Y. Long-term stationkeeping of space station in lunar halo orbits//Journal of Guidance, Control, and Dynamics. 2015. Vol. 38. № 6. P. 1063-1070.
- Ulybyshev Y. Trajectory optimization using discrete sets of pseudoimpulses: a review of advantages and difficulties//25th International Symposium on Space Flight Dynamics ISSFD, 19-23 October 2015, Munich, Germany. 19 p.
- Ulybyshev Y. Study of optimal transfers from l2 halo-orbits to lunar surface//AIAA Guidance, Navigation, and Control Conference, San-Diego, CA, AIAA Paper 2016-0480, 2016. 14 p.
- Лоуден Д.Ф. Оптимальные траектории для космической навигации. М.: Мир, 1966. 152 с.
- Edelbaum T.N. How many impulses//Astronautics and Aeronautics. 1967. Vol. 5. P. 64-69.
- Lion P.M., Handelsman M. Primer vector on fixed-time impulsive trajectories//AIAA Journal. 1968. Vol. 6. № 1. P. 127-132.
- Longuski J.M., Guzman J.J., Prussing J.E. Optimal control with aerospace applications. Springer, New York, 2014. 286 p.
- Брайсон А., Хо Ю-Ши. Прикладная теория оптимального управления. М.: Мир, 1972. 544 с.
