Обзор различных захватов для промышленных роботов манипуляторов

Автор: Мингазова И.Н.
Журнал: Форум молодых ученых @forum-nauka
Статья в выпуске: 7 (23), 2018 года.
Бесплатный доступ
Манипулятор промышленного робота (механическую руку) принято подразделять на две основные части - собственно манипулятор и захватное устройство (захват). Синонимами термина "захват" являются английские слова hand (рука), gripper (схват) и jaws (челюсти). В соответствии с терминологией, утвержденной японским промышленным стандартом JIS, захват называется просто кистью руки. Собственно манипулятор (без захватного устройства) часто называют рукой (arm), рукой манипулятора (manipulator arm) или просто манипулятором. Между двумя перечисленными частями механической руки существует следующее очевидное распределение ролей. Какую бы работу ни выполнял робот, в первую очередь необходимо правильно выбрать захватное устройство, способное надежно удерживать рабочий объект в процессе выполнения заданных манипуляций. Однако сами манипуляции (перемещение захвата с рабочим объектом) совершаются исключительно за счет манипулятора.
Манипулятор, захват, промышленный робот
Короткий адрес: https://sciup.org/140283912
IDR: 140283912
An overview of the different of grippers for industrial robots manipulators
The manipulator of an industrial robot (mechanical arm) is usually divided into two main parts - the actual manipulator and the gripper (grip). Synonyms of the term "capture" are the English words hand, gripper and jaws. In accordance with the terminology approved by the Japanese industrial standard JIS, the grip is simply called a hand brush. Actually the manipulator (without the gripper) is often called a hand, a hand of the manipulator or simply a manipulator. Between the two listed parts of the mechanical arm there is the following obvious distribution of roles. Whatever work the robot performs, first of all, it is necessary to choose the right gripper that can securely hold the working object in the process of performing the specified manipulations. However, the manipulations themselves (moving the capture with the working object) are made exclusively by the manipulator.
Текст научной статьи Обзор различных захватов для промышленных роботов манипуляторов
Промышленные роботы – это манипуляторы консольного типа , предназначенные для обслуживания термопластавтоматов и станков с ЧПУ.
Под обслуживанием станков понимается загрузка-выгрузка заготовок, деталей и их межстаночное транспортирование. Также, пока станки выполняют свои основные функции, робот может производить вторичные операции: маркировка, обрезка, продувка и т.п.
Роботы используются для обслуживания фрезерных, токарных и шлифовальных станков с ЧПУ, литейного оборудования, штамповочных и ковочных прессов, обрабатывающих центров и т.д. Роботы производятся серийно, либо по индивидуальному техническому заданию заказчика. Они могу иметь разные размеры, обладать разным классом точности, разной скоростью передвижения, разной грузоподъёмностью и иметь, например, 3,4 или 5 осей перемещения. Всё зависит от поставленных перед роботом задач. Преимущества роботов на производстве:
-
• Экономия на кадрах. Экономия на фонде заработной платы: применение роботов позволяет значительно сократить количество сотрудников на производстве;
-
• Достижение предельной производительности станков;
-
• Увеличение производительности труда;
-
• Экономическая эффективность – стоимость изготовления продукции уменьшается;
-
• Стабильность производственных циклов;
-
• Исключение человеческого фактора;
-
• Высокий коэффициент использования станка. Отсутствие человеческих слабостей: работа без перерывов в круглосуточном режиме, со стабильным результатом;
-
• Отсутствие несчастных случаев на производстве;
-
• Экономия производственной площади.
Робот-манипулятор является универсальным устройством и может использоваться в различных производственных линиях.
В зависимости от технического задания робот может быть оборудован различными исполнительными механизмами:
Типы захватов у роботов манипуляторов
Захватные устройства (ЗУ) предназначены для захвата и удержания объектов манипулирования. Современные промышленные роботы комплектуют типовым роботов захватные устройства могут проектироваться индивидуально. Захватные устройства должны обеспечивать надежный захват и удержание деталей различных по массе, размерам и конструкции (в пределах предусмотренных параметрами робота); стабильность базирования; быстроту переналадки; они не должны повреждать деталь в месте захвата.
На конструкцию захватных устройств влияют система ЧПУ, вид обслуживаемого оборудования, тип робота, серийность производства. Например, робот, обслуживающий группу станков в серийном производстве, должен иметь широкодиапазонные захватные устройства или их автоматическую смену. Захватные устройства для обслуживания патронных токарных станков отличаются по конструкции от захватных устройств, обслуживающих центровые станки
Классификация захватных устройств промышленных роботов проводится по многим признакам. Остановимся на некоторых из них. По принципу действия различают захватные устройства механические, магнитные, вакуумные, с эластичными камерами, деформирующимися под действием нагнетаемого внутрь воздуха или жидкости.
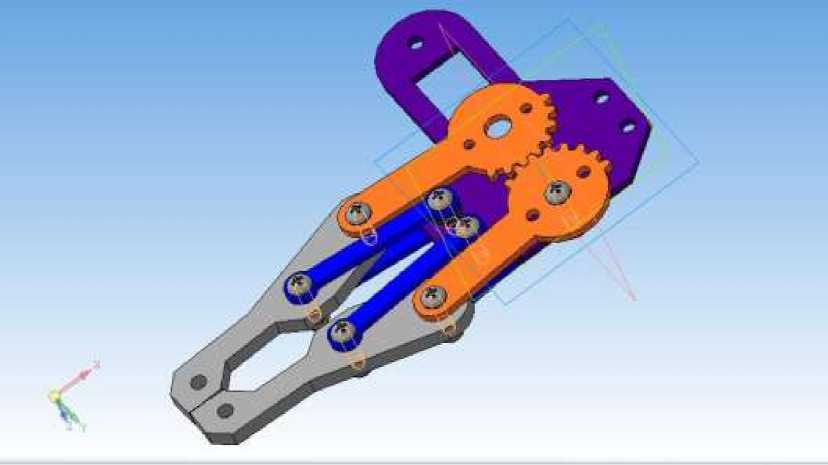
Рисунок 1 Механическое ЗУ
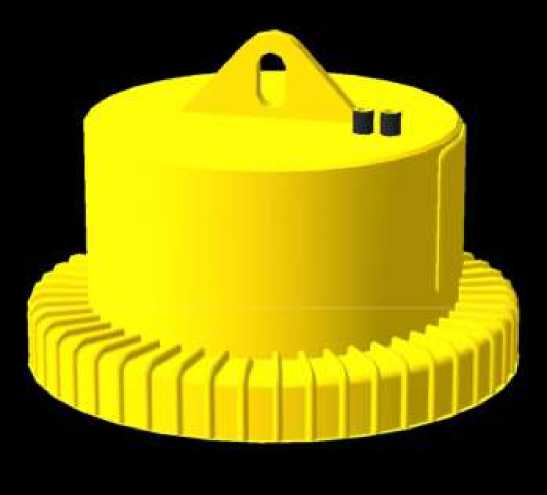
Рисунок 2 Магнитное ЗУ
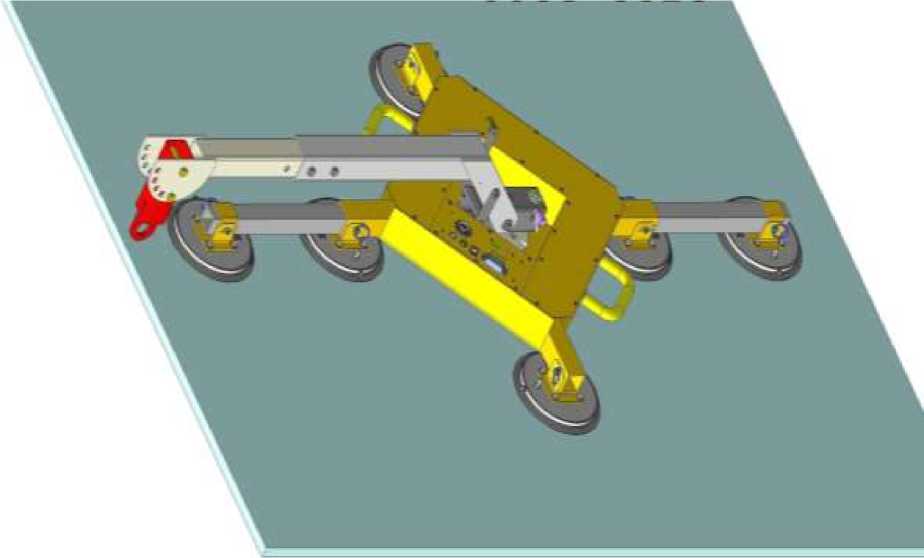
Рисунок 3 Вакуумное ЗУ
Захватные устройства всех групп могут быть одно-, двух- и многозахватными.
По характеру базирования различают захватные устройства центрирующие, определяющие положение оси или плоскости симметрии захватываемой заготовки; базирующие, определяющие положение базовой поверхности; перебазирующие; фиксирующие положение объекта, которое тот имел в момент захвата.
По характеру крепления различают захватные устройства несменяемые, сменные, быстросменные, с автоматической сменой.
По виду управления захватные устройства делят на неуправляемые, командные, жесткопрограммируемые, адаптивные. К неуправляемым относятся, например, захватные устройства с постоянными магнитами: чтобы освободить заготовку из захватного устройства, нужно приложить силу, большую, чем сила удержания.
Командные захватные устройства получают команды только на захват или отпускание объекта. Жесткопрограммируемые захватные устройства управляются устройством ПУ, определяющим в зависимости от программы величину перемещения губок, силу зажима, взаимное расположение рабочих элементов и т. д. Адаптивные захватные устройства также управляются устройством ПУ и оснащаются датчиками, дающими информацию об объекте и внешней среде, например, о форме поверхности объекта манипулирования или об усилии, возникающем в месте захвата, и т. д. Элементы адаптации предусмотрены, например, в захватном устройстве робота УМ160Ф281.01. Применяют «антропоморфные» захватные устройства, имитирующие кисть руки человека. Например, трехпалое устройство такого типа благодаря сгибанию «фаланг пальцев» может обеспечить 11 степеней подвижности. Каждое звено управляется отдельно и приводится в движение электродвигателями постоянного тока. Такие устройства могут захватывать и базировать детали разных размеров и формы.
Рассмотрим конструкции захватных устройств разных типов. Механические захватные устройства промышленных роботов наиболее распространены. Их классифицируют по типу привода (пружинные, пневматические, гидравлические, электромеханические), по типу губок
(жесткие, регулируемые, гибкие или пружинящие); по виду передаточного механизма (рычажные, реечные, клиновые). Механические захватные устройства с пневмоприводом просты, удобны, отсутствуют утечки, но при одних и тех же габаритных размерах с гидроприводом последний обеспечивает значительно большие силы захвата. Пневмопривод к тому же в отличие от гидропривода не позволяет точно регулировать силу зажима.
Захватные устройства с электромеханическим приводом встречаются реже. Для заготовок небольшой массы и габаритных размеров могут использоваться захватные устройства одностороннего действия, в которых губки раскрываются или закрываются пружиной.
Чтобы не повредить деталь при зажиме, часто применяют гибкие, эластичные или силораспределяющие захватные устройства. Для взятия хрупких предметов используют губки в виде надувных подушек или надувных пальцев (рисунок 4, а). Пальцы выполнены из резины цельными с постепенным переходом тонкостенной части 4 в гофрированную 3 и толстостенную часть 2 (рисунок 4, б). При подаче воздуха через канал 1 тонкостенная часть пальца удлиняется больше, чем гофрированная и утолщенная, поэтому происходит деформирование пальцев по линии 5 и зажим детали.
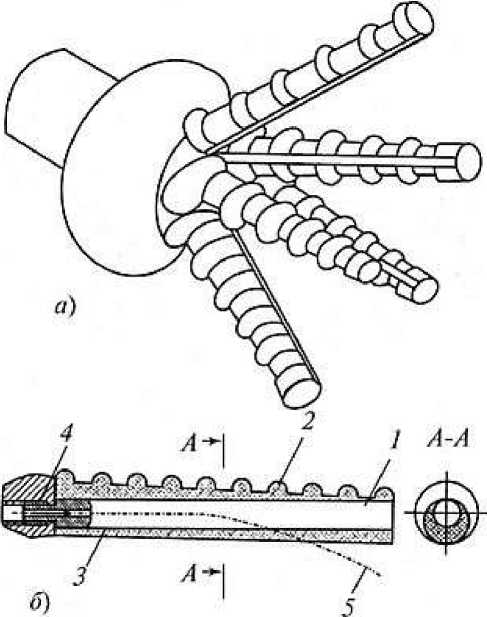
Рисунок 4. Захватное устройство с надувными пальцами
Анализ существующих конструкций захватных устройств промышленных роботов, применяемых в приборо- и машиностроении, показывает, что они достаточно разнообразны, так как разрабатываются под конкретную деталь, а по типам распределяются следующим образом: механические – 67%, вакуумные – 12%, магнитные – 4%, специальные – 17%.
Процентное соотношение ЗУ на машиностроительных и приборостроительных предприятиях
-
■ Механические ■ вакуумные ■ магнитные ■ специальные
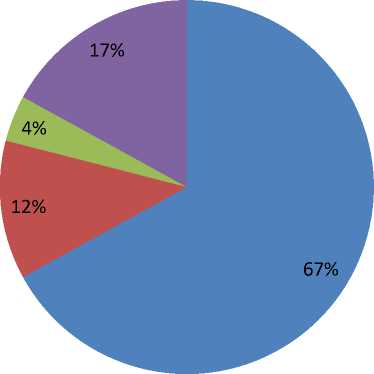
Рисунок 5
Для выбора новых и эффективных конструкций ЗУ может быть использован патентный фонд, например по разделу МКИ: В25J15/00.
Список литературы Обзор различных захватов для промышленных роботов манипуляторов
- Захватные устройства промышленных роботов. Дата обращения 28.06. 2018 http://delta-grup.ru/bibliot/35/198.htm
- Москвичев, А. А. Захватные устройства промышленных роботов и манипуляторов. Учебное пособие / А.А. Москвичев, А.Р. Кварталов, Б.В. Устинов. - М.: Форум, Инфра-М, 2015. - 176 c.
- Козырев, Ю. Г. Захватные устройства и инструменты промышленных роботов / Ю.Г. Козырев. - Москва: синтег, 2011. - 320 c.
