Обзор спецификаций системных параметров для анализа микропроцессорной производительности роевого применения БПЛА

Автор: Д. И. Ковалев
Журнал: Современные инновации, системы и технологии.
Рубрика: Управление, вычислительная техника и информатика
Статья в выпуске: 4 (3), 2024 года.
Бесплатный доступ
На основе общих методологических принципов спецификации системных параметров в статье рассматриваются системные параметры полетных контроллеров БПЛА с целью формирования модели микропроцессорной производительности роевого применения БПЛА в точном земледелии. Отмечается, что анализ основных полетных контроллеров БПЛА, применяемых в точном земледелии, позволит сформировать пул спецификаций системных параметров для анализа микропроцессорной производительности их роевого применения. При этом важно правильно оценивать влияние системных параметров на усовершенствование БПЛА и возможные перспективы развития полетных контроллеров нового поколения. Обоснованность спецификаций системных параметров контроллеров БПЛА существенно влияет на эффективность реализации транспортно-технологических циклов БПЛА в системах точного земледелия. В работе рассмотрен полетный контроллер нового поколения Pixhawk, а также семейство высокопроизводительных микроконтроллеров на базе ядра Cartex-M4. Отмечаются основные отличительные особенности микроконтроллеров данной серии. Делается вывод о том, что на микропроцессорную производительность также влияют характеристики функциональной периферии, которой обладает данное семейство контроллеров.
БПЛА, роевое применение, микропроцессорная производительность, системные параметры, спецификация
Короткий адрес: https://sciup.org/14131295
IDR: 14131295 | DOI: 10.47813/2782-2818-2024-4-3-0101-0120
Текст статьи Обзор спецификаций системных параметров для анализа микропроцессорной производительности роевого применения БПЛА
DOI:
В статье рассматриваются системные параметры полетных контроллеров БПЛА с целью формирования модели микропроцессорной производительности роевого применения БПЛА в точном земледелии. Представлен обзор общих методологических принципов спецификации системных параметров с учетом различных аспектов понятия спецификации и их роль и место в разработке и жизненном цикле аппаратнопрограммных комплексов БПЛА.
В ряде работ [1-5] авторы отмечают перспективность как индивидуального, так и роевого применения сельскохозяйственных БПЛА при опрыскивании сельхозугодий гербицидами и удобрениями. В работах [6-10] рассматриваются различные аспекты повышения надежности функционирования аппаратно-программных комплексов управления БПЛА и анализа производительности этих комплексов в различных условиях применения [11, 12]. Технологии точного земледелия требуют дальнейшего совершенствования, а опыт применения авиационных систем беспилотного опрыскивания, в частности, в Китае [13-15] показывает недостаточную производительность таких систем. В работе [15] выполнен анализ производительности четырех типов БПЛА, активно применяемых в КНР в настоящее время, и авторы отмечают необходимость дальнейших исследований в данном направлении.
Роевое применение БПЛА способно повысить общую производительность применения дронов-опрыскивателей, однако необходимо выполнить оценку микропроцессорной производительности роя БПЛА, чтобы оценить возможные потери как временные, так и ресурсные [16-20]. Модель системных параметров для анализа микропроцессорной производительности роевого применения БПЛА предложена в [21].
В данной работе рассматриваются базовые характеристики микропроцессорных систем управления БПЛА с целью их обобщенного представления в рамках модели оптимальной производительности БПЛА и анализа чувствительности системных параметров БПЛА при роевом применении в точном земледелии.
ОБЩИЕ МЕТОДОЛОГИЧЕСКИЕ ПРИНЦИПЫ СПЕЦИФИКАЦИИ СИСТЕМНЫХ ПАРАМЕТРОВ
Различные аспекты понятия спецификации и их роль и место в разработке и жизненном цикле аппаратно-программных комплексов БПЛА рассматривается на основе двух видов понятийных средств. К первому виду относятся понятия, из которых строятся и состоят спецификации, ко второму – понятия, с помощью которых создаются спецификации [22, 23]. В данной работе в следующих разделах подробно рассматривается первый вид понятий, непосредственно связанный с системными параметрами полетного контроллера БПЛА, характеристиками контроллеров нового поколения, включая высокопроизводительные микроконтроллеры на базе ядра Cartex-M4. Следует однако отметить, что открытым остается вопрос, связанный с реализацией второго вида понятийных средств, отражающего рекомендации методологического и прагматического характера и касающиеся того, как работать над спецификациями, чтобы достичь хорошего эффекта. В данном разделе сформулируем общие принципы, касающиеся спецификации как деятельности и ее методологических основ.
В [22] отмечается, что спецификация как вид деятельности отличается от программирования и математики, наиболее близких к ней видов деятельности. Авторы называют человека, занимающегося спецификацией, спецификатором (англ. - specifier), системным аналитиком, постановщиком задач и т.д. Учитывая, что доля трудовых и материальных затрат на создание спецификаций растет по сравнению с долей на реализацию транспортно-технологических циклов БПЛА в части их аппаратнопрограммного обеспечения [23], спецификация может существовать как самостоятельный и отчуждаемый продукт, создаваемый в одной организации, а реализуемый и используемый в другой. Это является тем обстоятельством, которое позволяет считать организацию производства спецификаций и организацию деятельности спецификаторов самостоятельной областью технологии информатики, требующей дополнительного внимания и пояснений, в частности, при совершенствовании подходов к спецификации системных параметров для анализа микропроцессорной производительности роевого применения БПЛА в точном земледелии.
Одним из важнейших с методологической точки зрения является принцип, требующий, чтобы спецификация опиралась на математику. Это позволит спецификации, как деятельности, обеспечить точность ее результата. При этом в работе над спецификациями важны следующие аспекты: использование математических объектов и выполнение требований логико-математической дисциплины. Как отмечается в [22], приемы работы с математическими объектами и язык математики, в котором они отражаются, обеспечивают надежную передачу точного понимания. Как подчеркивают авторы, данные приемы многократно проверены. И в этом существенное отличие понимания, систематически опирающегося на математические объекты и математический язык, от понимания, достигнутого каким-либо другим способом. Таким образом, математике отводится фундаментальная роль в спецификации как деятельности.
Особого внимания требует содержательная, неформальная или интуитивная сторона спецификации как деятельности. При это следует учитывать два вида трудностей: трудность перехода от содержательной, интуитивно понимаемой, несформулированной постановки задачи к ее точному описанию и трудность понимания уже созданного, готового точного описания. Многие авторы, обсуждая ряд понятий, подчеркивают, что в каждом рассматриваемом понятии надо стараться четко различать три компонента:
идею, формулировку и мотивировку. На пути от идеи и мотивировки к формулировке (и обратно) исключительно важна роль примеров, так как часто общие понятия возникают как обобщение примеров. Например, своеобразный вид примеров, используемых для спецификации аппаратно-программных комплексов, представляют собой прототипы или макеты программ или аппаратно-программных блоков. Они представляют собой пробные, предварительные, обычно упрощенные, но работающие модели специфицируемых объектов (как программных, так и аппаратных). Спецификаторы, экспериментируя на ЭВМ с такой моделью, имеют возможность уточнять постановку задачи.
Еще одна важная группа принципов отражает разделение аспектов и структуризацию по горизонтали и вертикали. При упорядочении, систематизации и осмыслении круга понятий, относящихся к задаче или области, полезный прием состоит в выделении частей – аспектов или групп (классов) объектов [22]. При этом принципы выделения или разделения предмета на части, аспекты, группы в конкретных ситуациях могут быть различными, однако общим должно быть то, что процесс выделения или разделения является осмысленным.
Отметим ряд работ [24-26], где такие выделения и разделения в процессе спецификации встречались многократно. Спецификации делились на функциональные и эксплуатационные, средства спецификации – на технологические и понятийные, в понятийных средствах выделялись классы, а в каждом из этих классов производились дополнительные выделения и разделения. Как отмечают авторы работ, в результате этих манипуляций аморфная вначале область спецификации (в данном случае, область спецификации программного обеспечения - Software Requirements Specifications) была расчленена на осмысленные куски и благодаря этому стала более обозримой и понятной.
Выделение аспектов, частей, групп, имеющих самостоятельное значение, дает возможность гибко комбинировать их в соответствии с разными целями. На это направлена одна из центральных идей работы [22], заключающаяся в описании системы практической теории определений (ПТО), и требующая тщательного и осмысленного разделения понятийных средств спецификации с тем, чтобы потом можно было их соединять и комбинировать любыми нужными способами. Как отмечает автор, хорошее соединение (синтез) требует хорошего разделения (анализа).
Выделение (разделение) обычно сопровождается установлением или выявлением связей как между выделенными компонентами, аспектами, группами, так и внутри них.
Таким образом формируется структура рассматриваемой области или предмета, следовательно, можно говорить о процессе структуризации предмета (области). Важно то, что такая структуризация может применяться как к обстоятельствам, связанным со спецификацией как деятельностью, так и к самими спецификациям, которые являются ее результатом. Как правило, выделяется два типа структуризации спецификаций – вертикальная и горизонтальная. Первая характеризуется разделением описания (процесса описания) на уровни, определяя уровневую структуру описания. Горизонтальный тип структуризации определяет структуру описания на каждом конкретном уровне, который был выделен. Отметим, что разделение на уровни и структуризация по вертикали имеют существенное значение при разработке спецификаций. Это принципиально предполагается в ряде методологий проектирования, таких как «сверху вниз», «снизу вверх» и т.п. Не менее важна и структуризация по горизонтали.
Изложение дальнейших разделов статьи, непосредственно связанных с системными параметрами полетных контроллеров БПЛА, отражает такие важные свойства спецификаций, как конкретность и привязку к реальной ситуации. Это позволяет продемонстрировать то, что методологические принципы и рекомендации данного раздела действительно работают. В реальной производственной ситуации выбор средств спецификации, уровней, структуризации и т.д. должен быть привязан к базовому языку описания (модели), инструментальным средствам и транспортно-технологическим циклам БПЛА, применяемым в системе точного земледелия. В этом случае одной из важных задач для спецификаторов является разработка, выявление и организация средств спецификации как технологических, так и понятийных.
Возвращаясь к упоминаемой ранее логической стороне математических определений и построений, отметим необходимость использования методов формализации. Ряд авторов [22-26] называет это логико-математической дисциплиной, которую необходимо соблюдать при построении определений, чтобы обеспечить надежность получаемых понятий.
Математические понятия строятся, исходя из некоторых базисных или первичных понятий. Базисные понятия в разных областях и контекстах могут быть различными: от простых и очевидных до более сложных. Однако они должны быть знакомыми и хорошо освоенными спецификаторами. Очевидно, что другие понятия в данном контексте определяются через базисные или друг через друга. Тогда набор определений (спецификация) задает базисное отношение между участвующими в нем понятиями.
Этим принципам в полной мере соответствует графоаналитический метод спецификации транспортно-технологических циклов (ТТЦ) БПЛА на базе GERT-сетей [2, 9, 16, 22]. Базисной является GERT-подобная узловая логика, позволяющая вводить понятия узлов ТТЦ и получать допустимые реализации циклов, характеризующие циклически повторяющиеся последовательности транспортно-технологических операций БПЛА.
СИСТЕМНЫЕ ПАРАМЕТРЫ ПОЛЕТНОГО КОНТРОЛЛЕРА
Эволюция полетных контроллеров БПЛА представлена в работе [27], где авторами в рамках исследования составлены блок-схемы систем управления БПЛА по мере их развития. Отметим важное значение обобщенной эволюции таких систем, которая представлена в работе и которая устанавливает периодизацию отдельных этапов развития. В частности, выделяется девять этапов и отмечается, что на текущем этапе основным направлением является разработка систем интеллектуального управления. Можно отметить, что повышение общей производительности и функциональности сельскохозяйственных распылительных БПЛА будет зависеть от дальнейшего развития и совершенствования технологий применяемых микроэлектромеханических систем.
Анализ основных полетных контроллеров БПЛА, применяемых в точном земледелии, позволит сформировать пул спецификаций системных параметров для анализа микропроцессорной производительности роевого применения БПЛА, а также оценить их влияние на усовершенствование БПЛА и спрогнозировать возможные перспективы развития полетных контроллеров. Все это существенно влияет на эффективность реализации транспортно-технологических циклов БПЛА в системах точного земледелия [28, 29].
Характеристики контроллеров нового поколения
На рисунке 1 представлен внешний облик полетного контроллера нового поколения Pixhawk [27]. Эта разработка представляет собой дальнейший шаг в развитии проекта PX4 и программного кода Ardupilot от 3DRobotics. Контроллер реализован на базе операционной системы реального времени (ОСРВ) NuttX. Особенностью контроллера является то, что он успешно поддерживает большое количество систем, включая наземные, воздушные, наводные. Для эффективной поддержки в аппаратнопрограммном комплексе реализованы различные модули и интерфейсы для их связи, используется программное обеспечение (ПО) Mission Planner как ArduPilot. Благодаря поддержке различных типов систем за счет своей универсальности данный контроллер активно применяется на практике и его использование популярно среди проектировщиков и производителей беспилотных систем.

Рисунок 1. Внешний вид контроллера Pixhawk (источник: .
-
Figure 1. External appearance of the Pixhawk controller (source: https://russiandrone.ru/publications/evolyutsiya-sistem-upravleniya-bespilotnykh-letatelnykh-apparatov-ot-poyavleniya-do-nashikh-dney-aerogeo/ ).
В [27] приведены характеристики контроллера. Среди основных отметим следующие:
-
• 32-битный микропроцессор STM32F427 Cortex M4 (168MHz, FLASH-память 2 Мб, RAM- память 256кб);
-
• 32-битный сопроцессор STM32F103;
-
• ST Micro L3GD 20 – 3-осевой гироскоп;
-
• ST Micro LSM303D – 3-осевой акселерометр/магнитометр;
-
• MPU6000 - 3-осевой акселерометр/гироскоп;
-
• MEAS MS5611 – барометр.
Представленная на рисунке 2 блок-схема системы управления беспилотного аппарата подробно рассматривается в [27] и демонстрирует основные модули и блоки, включая блок полетного контроллера и датчики, а также структурное взаимодействие элементов через каналы связи. Такое рассмотрение позволяет использовать упомянутые выше типы структуризации (вертикальная и горизонтальная) при разработке спецификаций ТТЦ БПЛА. Блок-схема характеризуется разделением описания системы управления, как и самого процесса описания, на уровни, что позволяет достаточно легко определить уровневую структуру описания. С использованием горизонтального типа структуризации определяется структуру описания на каждом уровне системы управления, который был выделен на блок-схеме.
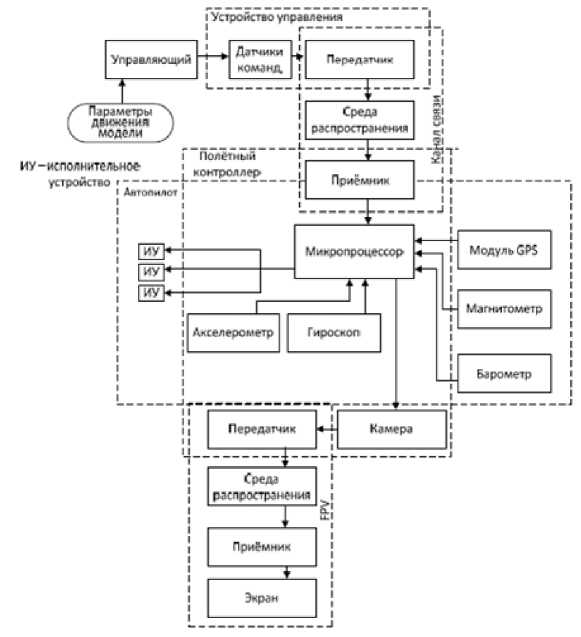
Рисунок 2. Блок-схема системы управления (источник:
.
Figure 2. Block diagram of the control system (source:
.
Высокопроизводительные микроконтроллеры на базе ядра Cortex-M4
Отражая такие важные свойства спецификаций, как конкретность и привязка к реальным объектам и процессам, в данном разделе рассматриваются основные системные характеристики серии высокопроизводительных микроконтроллеров на базе ядра Cartex-M4 (STMicroelectronics: STM32F4). Достаточно полный обзор высокопроизводительных микроконтроллеров на базе ядра Cortex-M4 можно найти в [30], где авторы отмечают, что STM32F4 относится к серии микроконтроллеров с максимальной в отрасли производительностью среди всех устройств на базе ядра CortexTM-M. Отметим некоторые базовые характеристики, данные в описании микроконтроллера в [30]:
-
• максимальная частота процессора 168 МГц;
-
• производительность до 210 MIPS по тесту Dhrystone и 363 MIPS по тесту CoreMark консорциума EEMBC;
-
• более 250 совместимых по выходам и программному коду устройств, включая серии F1 и F2, а также сверхмалопотребляющую серию L1.
Особенностью серии F4 является то, что она поддерживает более высокую тактовую частоту (168 МГц вместо 120 МГц). Это обеспечивает исполнение однотактных DSP-инструкций. Серия F4 оснащена блоком арифметики с плавающей точкой и SRAM-памятью большего размера (до 192 КБайт). При этом обеспечивается высокий уровень производительности и исполнения программного кода с нулевым временем ожидания на рабочей частоте до 168 МГц, чему способствует наличие 90-нанометрового технологического процесса и интегрированного адаптивного ускорителя в масштабе реального времени (ART Accelerator компании STMicroelectronics). При таких характеристиках, тем не менее, многие отмечают лучший в своем классе устройств уровень динамического энергопотребления.
Также следует отметить, что микроконтроллеры STM32F4 выполнены на базе ядра Cortex-M4, отличительной особенностью которого является поддержка DSP-инструкций и операций с плавающей точкой. Это значительно упрощает исполнение сложных вычислительных и управляющих алгоритмов, что актуально для современных систем управления БПЛА.
Технологические возможности позволяют использовать одинаковую топологию печатной платы для приложений различного уровня сложности, в частности для высокого уровня на базе STM32F4 или для низкоуровневых по сложности и недорогих приложений на базе STM32F2 или STM32F1.
Относительно STM32F4 отмечается, что по сравнению с микроконтроллерами предыдущих серий (STM32) в них обеспечивается значительное ускорение работы последовательных интерфейсов, например, UART поддерживает скорость передачи данных до 10.5 Мбит/с. К новым возможностям можно отнести наличие интегрированного контроллера графического дисплея и дополнительные интерфейсы памяти CompactFlash (NOR- и NAND FLASH, PSRAM). Также отмечается наличие аппаратного модуля шифрования, интерфейса камеры, до 17 таймеров и адаптивного ускорителя памяти, реализованных по 90-нм технологии.
Архитектура микроконтроллеров серии STM32F4 рассмотрена в [30] и представлена ниже на рисунке 3.
Отметим основные отличительные особенности микроконтроллеров данной серии, описанные в [30], и которые оказывают существенное влияние на спецификацию системных параметров для анализа микропроцессорной производительности роевого применения БПЛА. К ним в [30] отнесен высокоскоростной обмен данными, что обеспечивается посредством 7-уровневой расширенной высокопроизводительной шины (AHB). В архитектуре доступны несколько контроллеров прямого доступа к памяти (DMA), что позволяет одновременное исполнение инструкций и передачу данных. Интегрированный блок вычислений с плавающей точкой с одинарной точностью позволяет ускорить исполнение управляющих алгоритмов. Это, в свою очередь, расширяет возможности приложения и увеличивает эффективность программного кода. Контроллер обладает высоким уровнем интеграции, что обеспечивает до 1 МБайт внутренней FLASH памяти, до 192 КБайт SRAM, схему сброса, внутренние RC-генераторы, схему ФАПЧ, часы реального времени с потреблением в рабочем состоянии менее 1 мкА и точностью до долей секунды.
Для анализа микропроцессорной производительности существенное значение имеет гибкость энергопотребления в приложениях. Это важно там, где необходимы одновременно высокие вычислительные возможности и низкий уровень энергопотребления при работе в низковольтных схемах или от аккумуляторной батареи. К таким возможностям относятся: 4 КБайт SRAM резервного копирования данных в режиме ожидания или при работе от резервной батареи. Внутренний регулятор напряжения позволяет выбирать режим большей производительности или меньшего энергопотребления.
На микропроцессорную производительность также влияют характеристики функциональной периферии, которой обладает данное семейство контроллеров. В [30] отмечается высокий уровень коммуникативности, который обеспечивается за счет наличия интерфейса видеокамеры, аппаратного процессора шифрования/хеширования, контроллера доступа к среде (MAC) Ethernet 10/100 с поддержкой протокола IEEE 1588 v2, двух контроллеров USB 2.0 OTG (один с поддержкой полноскоростного режима). Отметим наличие до 15 коммуникационных интерфейсов: шесть USART со скоростью до 10.5 Мбит/с, три SPI со скоростью до 42 Мбит/с, три I2C, два CAN, SDIO. Касаясь аналоговой части, отметим наличие двух 12-битных ЦАП, трех 12-битных АЦП с частотой преобразования 2.4 MSPS (млн. выборок в секунду) каждый, либо 7.2 MSPS в режиме чередования, а также до 17 таймеров: 16- и 32-битные с рабочей частотой до 168 МГц.
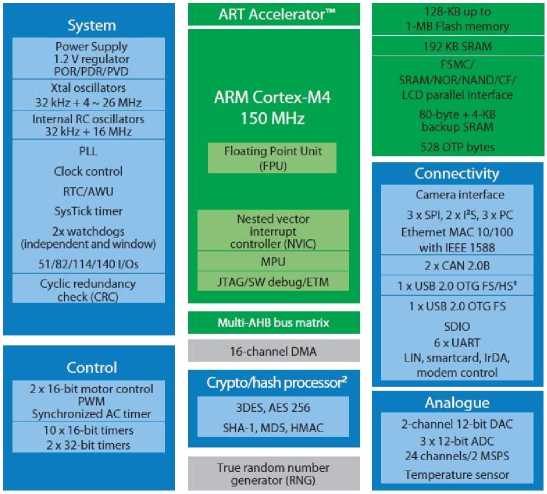
Рисунок 3. Архитектура микроконтроллеров серии STM32F4 (источник: .
Figure 3. Architecture of the STM32F4 series microcontrollers (source: .
Более полную информацию о характеристиках и областях применения микроконтроллеров рассмотренных классов можно найти в [27, 30]. В данной работе при анализе характеристик и параметров полетных контроллеров акцент делался на их соответствие предлагаемому подходу к формированию спецификаций системных параметров для анализа микропроцессорной производительности роевого применения БПЛА в точном земледелии.
ЗАКЛЮЧЕНИЕ
Таким образом, рассмотренные характеристики высокопроизводительных контроллеров для БПЛА позволяют обоснованно подойти к формированию модели системных параметров для анализа микропроцессорной производительности роевого применения БПЛА в точном земледелии. Рассмотренные перспективы развития полетных контроллеров отражают совершенствование спецификаций системных параметров для анализа микропроцессорной производительности роевого применения БПЛА, а также выполнить анализ чувствительности общей производительности БПЛА к изменению основных системных параметров с целью повышения эффективности реализации транспортно-технологических циклов БПЛА в системах точного земледелия.
