Оценка информационной емкости системы контроля на основе бинарных оптомеханических датчиков

Автор: Зеленский Владимир Анатольевич, Корбан Дмитрий Владимирович
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Физика и электроника
Статья в выпуске: 4-1 т.15, 2013 года.
Бесплатный доступ
В данной статье рассмотрена методика оценки информационной емкости системы контроля на основе бинарных оптомеханических датчиков. Оценка выполнена с помощью анализа математической модели передачи оптической мощности через бинарный датчик.
Информационная емкость, бинарный оптомеханический датчик, система контроля
Короткий адрес: https://sciup.org/148202255
IDR: 148202255 | УДК: 681.586;
Capacity information estimate of control system based on binary optomechanical sensors
In this article we described capacity information estimate method of control system based on binary optomechanical sensors. Estimate was done with help analysis of optic power transmission mathematical model over binary sensors.
Текст научной статьи Оценка информационной емкости системы контроля на основе бинарных оптомеханических датчиков
В комплексных системах автоматизированного управления объектами добычи, подготовки и транспортировки нефти и газа всё чаще используются волоконно-оптические компоненты и устройства. Волоконно-оптические датчики физических величин позволяют контролировать температуру, давление и механические перемещения деталей и узлов функционирующих объектов [1 -3]. Рассмотренные в [4, 5] бинарные оптомеханические датчики (БОМД) являются разновидностью волоконно-оптических датчиков и позволяют эффективно определять пороговые значения контролируемых параметров.
В качестве примера использования БОМД на рис. 1 представлена система очистки отработавшего газа.
Цифрами на рис.1 обозначены: 1 - нагнетательный вентилятор, 2 - охлаждающие насосы, 3 - смесительная камера, 4 – водяные насосы, 5 – газоочиститель, 6 – циркуляционные насосы, 7 -бинарные оптомеханические датчики, 8 – интеллектуальный блок обработки. Как видно из рисунка, все БОМД связаны с объектами контроля и интеллектуальным блоком обработки с помощью единого последовательного волоконно-оптического канала. Датчики контролируют работу охлаждающих, водяных и циркулярных насосов и, в случае нештатной ситуации, выдают в блок обработки сигнал тревоги.
Последовательное включение БОМД накладывает свои методические ограничения, подробно рассмотренные в [4]. В то же время, достоин-
Отработавший газ
Очищенный газ
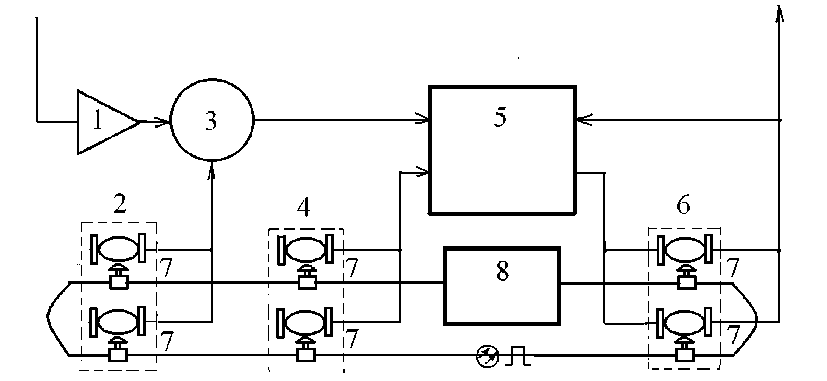
Рис. 1. Система очистки отработавшего газа
ством данного метода являются простота ин сталляции системы, минимум затрат и возмож ность масштабирования, т.е. включение в сис тему дополнительных контролируемых объек тов и датчиков.
Целью данной работы является оценка информационных возможностей системы контроля состояния объектов с помощью последовательно включенных БОМД. Информационная емкость определяется путем расчета максимально возможного количества датчиков в системе при существующей технологии изготовления элементов первичных преобразователей.
Базовая конструкция бинарного оптомеханического датчика перемещений представлена на рис. 2.
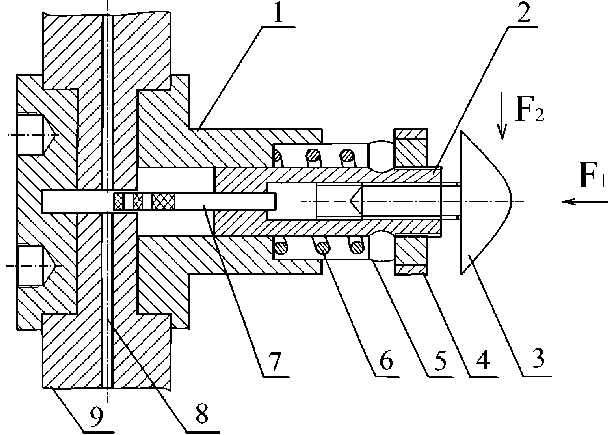
Рис. 2. Базовая конструкция бинарного оптомеханического датчика перемещений
Для анализа этой зависимости рассмотрим математическую модель передачи оптической мощности в БОМД. При построении математических преобразований используются волновая теория и формулы, отражающие закономерности рассогласований при осевом смещении световодов и боковом смещении их осей. Угловое рассогласование осей соединяемых световодов минимизируется конструкцией и технологией изготовления датчика (рис. 3).
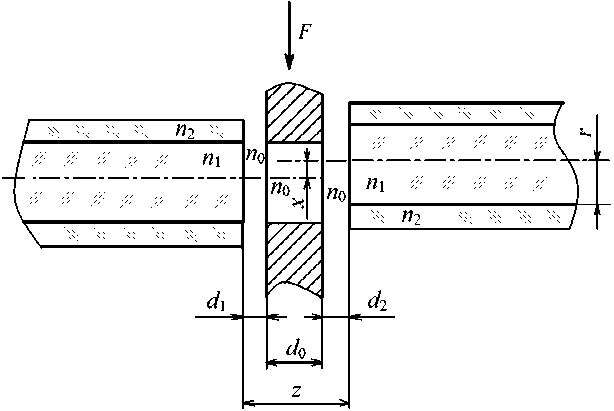
Рис. 3. Модель передачи оптической мощности в БОМД
На рис. 3 введены обозначения: F - направление перемещения кодирующего элемента; d 0 – толщина кодирующего элемента; d 1, d 2 – зазоры между кодирующим элементом и торцами оптических волокон; n о, n 1, n 2– показатели преломления среды, сердцевины и оболочки оптического волокна; r – радиус оптического волокна, z , x – соответственно осевое и боковое смещение оптических волокон.
Волновая теория распространения оптического излучения определяет величину вносимых потерь как:
P
В = 101g ,
P вх
где P вх – оптическая мощность на входе волоконно-оптического канала, P вых – оптическая мощность на выходе волоконно-оптического канала.
Величина потерь B является суммой результатом действия различных факторов, что можно представить как:
m
В = Z Bi,
i = 1
где i – порядковый номер фактора, m – число действующих факторов.
К факторам рассогласования, кроме перечисленных выше относятся непараллельность торцов световодов, шероховатость на торцевой по- верхности световодов, разность диаметров сердцевин световодов, разница числовых апертур, эллиптичность световодов, разница показателей преломления сердцевин световодов, френелевские отражения от торца оптических волокон [8].
При использовании многомодовых оптических волокон со ступенчатым профилем показателя преломления и равномерных установлением мощности по модам распространения общие потери определяются как сумма потерь от отдельных видов рассогласования.
Можно представить потери, вызванные действием i -го фактора как:
Bi = - 10 lg( Ki) , (3)
где Ki – коэффициент передачи через соединение оптических волокон, 0 < K i < 1 .
Тогда справедливы выражения:
- 10lg - вых- = - 10 ( lg( K i ) + lg( K 2 ) + ... + lg( K i ) + ... + lg( K m )) ;(4)
P вх
P lg= (lg(K1) + lg(K2) +... + lg(Ki) +... + lg(Km)); (5) вх
. P lg p = lg[( KJ( K 2)...( K,)...(Km)]; (6)
вх
m
- вых = P „ П K i . (7)
г = 1
В рассматриваемом виде датчика потери из-за осевого рассогласования оказываются доминирующими, поскольку необходимо обеспечить технологически реализуемую толщину кодового элемента d 0, а также технологические зазоры между кодовым элементом и торцами оптических волокон d 1, d 2. Коэффициенты передачи для случая осевого и бокового смещения определяются как [8]:
вая апертура волоконного световода.
Числовая апертура оптических волокон определяется выражением:
NA = n 0 д/ n 12 - n 2 ,
где n 0 – показатель преломления среды, n 1 – показатель преломления сердцевины, n 2 - показатель преломления оболочки. В табл. 1 приведены значения числовых апертур для промышленных образцов оптических волокон [9] .
При производстве многомодовых волокон допуски на диаметр светоотражающей оболочки составляют + 2 мкм. Это означает, что волокно с диаметром 123 мкм может соединяться с волокном диаметром 127 мкм. При механическом соединении эти различия могут дать значительное возрастание потерь: до 0,36 дБ. На практике необходимость снижения потерь за различия диаметров оболочек повышает требования точности юстировки стыкуемых световодов.
Для определения потерь за счёт бокового смещения оптических волокон преобразуем формулу (8), учитывая, что для небольших смещений оптических волокон ( x < 0,5 r ) с точностью до 0,02 % справедливо преобразование:
K 1 = - 10lg
и, далее:
1 -
л
; (12)
K 1
- 10 lg
1 -
arcsin
;(8)
K 2 =
- 10lg | 1 - — NA I . ( 4 r )
Тогда, используя выражения (1) – (10) получим соотношение для мощности оптического сигнала, прошедшего датчик:

( 1 - 4bNA ) ,(11)
где x – поперечное смещение оптических волокон, r – радиус оптического волокна, z – продольное смещение оптических волокон, NA – число-
K 1 =- 10 lg
1 -
лг
. (13)
Тогда для бокового смещения 5 мкм потери не превысят величины 0,47 дБ по мощности.
Френелевские (однократные) потери на отражение торца принимающего световода составляют величину порядка 0,17–0,20 дБ.
Учитывая соотношения (11) – (13) определим зависимость информационной емкости системы от технологических параметров БОМД с учетом динамического диапазона всего оптического канала (табл. 2).
Полученные результаты говорят о том, что увеличение информационной емкости системы контроля требует более совершенной технологии изготовления оптико-механических элементов. Анализ математической модели передачи оптического излучения показывает взаимосвязь меж-
Таблица 1. Апертуры оптических волокон, выпускаемых промышленностью
|
Тип оптического волокна |
Числовая ап ертура |
Рабочая длина волны |
|
SMF-28e+ |
0,14 |
1310 нм |
|
Corning InfiniCor 62.5 |
0,275 |
1310 нм, 1550 нм |
|
Corning LEAF |
0,14 |
1550 нм |
Таблица 2. Зависимость числа датчиков от значения динамического диапазона и технологических параметров
|
Технологические параметры датчика, мкм |
|||||||||||||||
|
Динамический диапазон, дБ |
d 0 |
d 1 |
d 2 |
d 0 |
d 1 |
d 2 |
d 0 |
d 1 |
d 2 |
d 0 |
d 1 |
d 2 |
d 0 |
d 1 |
d 2 |
|
300 |
50 |
50 |
250 |
50 |
50 |
250 |
25 |
25 |
200 |
25 |
25 |
150 |
25 |
25 |
|
|
40 |
4 |
5 |
7 |
9 |
11 |
||||||||||
|
50 |
5 |
6 |
9 |
11 |
14 |
||||||||||
|
60 |
6 |
8 |
10 |
13 |
17 |
||||||||||
|
70 |
7 |
9 |
12 |
16 |
20 |
||||||||||
CAPACITY INFORMATION ESTIMATE OF CONTROL SYSTEM BASED ON BINARY OPTOMECHANICAL SENSORS
ду параметрами БОМД и количеством датчиков в системе. Данные результаты могут быть использованы при проектировании систем автоматического контроля на основе бинарных оптомеханических датчиков и расчёта их характеристик.
Список литературы Оценка информационной емкости системы контроля на основе бинарных оптомеханических датчиков
- Дианов Е.М. Волоконная оптика: 40 лет спустя//Квантовая электроника. 2010. Т.40, № 1. С.1 -6.
- Гиниятулин Н.И. Волоконно-оптические преобразователи информации. -М.:Машиностроение, 2004. 328 с.
- Buimistriuc, G. Monitoring of a technical condition of the Arctic main gas pipeline/G. Buimistriuc, D. Vichevic, R. Guliants//Oil&Gas Journal Russia, 2008, No 6 (19). P. 67-76.
- Голубятников И.В., Зеленский В.А., Шатерников В.Е. Системы мониторинга сложных объектов. М.:Машиностроение, 2009. 172 с.
- Корбан Д.В. Волоконно-оптические датчики механических перемещений // Актуальные проблемы радиоэлектроники и телекоммуникаций // Тр. Всерос. науч. конф. – Самара: СГАУ. 2012. С. 200-204.
- Зеленский В.А. Метод трехуровневого кодирования сигналов бинарных волоконно-оптических датчиков//Актуальные проблемы радиоэлектроники и телекоммуникаций: Тр. Всерос. науч. конф. Самара: СГАУ. 2009. С. 96-97.
- Зеленский В.А. Бинарный оптомеханический датчик реверсивных перемещений с кодовым выходом // Вестник Самарского государственного технического университета. Сер. Технические науки. 2009. № 2 (24). С. 222-225.
- Бутусов М.М., Галкин С.Л., Оробинский С.П., Пал Б.П. Волоконная оптика и приборостроение. Л.: Машиностроение, Ленинградское отделение, 1987 г. 256 с.
- Андреев, В.А. Технология строительства ВОЛС/В.А. Андреев, А.В. Бурдин, В.А.Бурдин и др. Самара: СРТТЦ ПГАТИ, 2006. 274 с.
