Оценка эффективности низкочастотных методов измерения расстояния в подземных горных выработках для реализации системы предотвращения столкновений

Автор: Майков О.А., Кохонькова Е.А., Романов В.В., Краснов Т.В., Бурлаков И.Е.
Журнал: Журнал Сибирского федерального университета. Серия: Техника и технологии @technologies-sfu
Рубрика: Исследования. Проектирование. Опыт эксплуатации
Статья в выпуске: 1 т.17, 2024 года.
Бесплатный доступ
В статье приведен анализ эффективности метода определения расстояния между подвижными объектами в виде техники и персонала для целей предотвращения столкновений с использованием низкочастотных магнитных полей. Авторами сделаны оценки влияния геологии горных выработок, поверхности земли и транспорта на магнитное поле магнитного транспондера в VLF и LF диапазоне. Сформировано конструкторское решение для определения расстояния методом RSSI и получены экспериментальные результаты.
Очень низкие частоты, низкие частоты, магнитные поля, определение расстояния, предотвращение столкновений и наезда, шахта
Короткий адрес: https://sciup.org/146282837
IDR: 146282837 | УДК: 654.937
Evaluation of the efficiency of low-frequency distance measurement methods in underground mine workings for the implementation of a collision avoidance system
The article analyzes the effectiveness of the method for determining the distance between moving objects in the form of equipment and personnel for the purpose of preventing collisions using low-frequency magnetic fields. The authors made estimates of the influence of the geology of mine workings, the surface of the earth and transport on the magnetic field of a magnetic transponder in the VLF and LF bands. A design solution for determining the distance by the RSSI method is formed and experimental results are obtained.
Текст научной статьи Оценка эффективности низкочастотных методов измерения расстояния в подземных горных выработках для реализации системы предотвращения столкновений
В связи с растущим числом непреднамеренных взаимодействий подвижной техники и рабочих, происходящих в подземных шахтах, создание и обслуживание системы предотвращения столкновений стало необходимым для горнодобывающей промышленности ввиду высоких рисков и повышения требований к безопасности. Аварии представляют большой риск финансовых затрат для горнодобывающих компаний и даже приводят к человеческим жертвам. Для предотвращения таких аварий применяется множество методов, включая алгоритмы определения дальности с использованием различных датчиков приближения и улучшения возможностей ситуационной осведомленности персонала. Эффективность систем связи определяет и способствует успеху конечной интегрированной системы, которую можно использовать для фундаментального решения проблемы предотвращения столкновений транспорта и персонала. В настоящее время классификация систем и подсистем «умного» горного производства, в том числе для автоматизированного и автономного режимов работы горно-транспортной техники, активно прорабатывается во всем мире в виде международных отраслевых стандартов.
В подземных шахтах существует множество потенциальных опасностей и рисков. В промышленности было разработано и внедрено множество методов для минимизации рисков травм и смертельных аварий. Наиболее частые опасности возникают в результате нахождения горняков вблизи транспортных средств и механизмов, работающих в стесненных условиях, транспортных средств и персонала, взаимодействия между транспортными средствами шахты и инфраструктурой [1, 2]. Из них наибольшие риски представляют столкновения транспортных средств друг с другом и персоналом [2, 3]. Для их минимизации необходимо повысить ситуационную осведомленность горняков за счет разработки автоматизированных систем обнаружения сближения и предупреждения столкновений [4]. Задача состоит в том, чтобы применить предотвращения столкновений, что могло бы эффективно и точно действовать в замкнутых условиях выработок с плохой видимостью. Оценка рисков столкновения или наезда напрямую связана с идентификацией присутствия подвижной техники вблизи персонала, а также с измерением расстояния между активным передатчиком и регистрирующим его сигнал приемником. Расстояние между транспортом и рабочим подразделяется на зоны риска. Так, расстояние менее 30 м требует высокой точности при регистрации этого параметра. При регистрации приближения техники к человеку необходимо сигнализировать о приближении потенциальной опасности столкновения. Сложность состоит в методе оперативного определения расстояния между приемным устройством и активным передатчиком в сложных условиях подземных шахт.
При определении расстояния и позиционирования при помощи электромагнитных волн используют несколько различных принципов [5–9]: измерение времени прохождения (ToF); измерение разницы во времени прибытия (ToA, TDoA); измерение угла прихода (AoA); измерение значения мощности или уровня сигнала, наведенного на антенне приемного устройства RSSI.
Методы определения расстояния ToA, TDoA и AoA требуют синхронизации базовых станций во времени что увеличивает затраты на обеспечение шахты полным покрытием такой системы позиционирования, а также не позволяет оперативно реагировать из-за большого количества узлов обработки и принятия решений. Данные методы наиболее подходящие для открытых пространств и наземных производств.
Метод ToF является наиболее портативным и не требует стационарных базовых станций. Инициатор передает запрос дальности и записывает время передачи. Когда запрос ранжирования получен ответчиком, он передает ответное сообщение обратно инициатору. Когда инициатор получает ответ, он записывает время получения, тогда время пролета, указанное на часах передатчика, позволяет вычислить расстояние между узлами, умножив время пролета импульса на скорость света.
Данный способ определения расстояния работает в ВЧ- и СВЧ-диапазоне и требует прямой видимости. Специфика горных выработок вызывает множественные переотражения и рассеяние сигнала из-за неровного рельефа стен и свода. Количество энергии в отраженной волне также зависит от электрофизических свойств среды и технического оснащения шахт. Из-за представленных факторов погрешность определения расстояния методом ToF сильно увеличивается ввиду рассеяния волн у стен, множественного переотражения волн. Также нахождение человека с радиомодулем вне зоны прямой видимости, таких как преграда или поворот в прилегающий тоннель, может привести к потере сигнала или некорректному обмену данными между модулем транспорта и модулем горнорабочего из-за влияния массива горной породы. Также это приводит к увеличению расстояния и времени пролета волны, что делает измерение данных о расстоянии некорректным.
В качестве альтернативы предлагается рассмотреть использование низкочастотных магнитных полей (ОНЧ-, НЧ-диапазоны), которые более устойчивы к влиянию горных пород, слагающих стены и свод тоннелей. Волны этого диапазона практически не искажаются и не отражаются от границы воздух – горная порода. Работа с низкочастотными полями позволит применять алгоритм RSSI для определения расстояния между устройствами ввиду предсказуемого характера ослабления электромагнитного поля в ближней зоне. В статье дается оценка влияния свойств горной породы на зависимость изменения уровня сигнала с увеличением расстояния до 30 м для ряда рабочих частот. Также предлагается вариант технической реализации способа оценки расстояния с использованием магнитного маяка.
Методология исследования
Поглощение в проводящих средах для электромагнитных полей VLF/LF-диапазона в основном обуславливается их удельной электропроводностью σ (См/м) или обратной величиной – удельным электрическим сопротивлением ρ (Ом·м), которые зависят от удельной плотности материала (зернистости), трещиноватости, пористости и влажности. Горные породы отличаются по электрофизическим свойствам и включаются в классификацию по схожим условиям их формирования. В качестве информационного параметра наиболее подходящим для технической реализации является магнитное поле ввиду возможности реализации компактного технического решения в виде магнитных антенн.
Напряженность магнитной составляющей изменяется по гармоническому закону [10]:
Ну =Нш Sin[^t + ^H\(1)
где H m – мгновенная напряженность магнитного поля; ω=2π f – угловая частота; f – частота ЭМ поля; ψ – начальная фаза.
Комплексная амплитуда представлена в форме:
Ну=Нтем.(2)
Вещественная часть волнового числа k влияет на напряженность составляющих ЭМ поля и включается в коэффициент затухания:
а = (1 + i)k = ^/юцсг,(3)
где k – волновое число среды; μ – относительная магнитная проницаемость среды; σ=1/ρ – удельная электропроводность среды; ρ – удельное сопротивление среды.
Так, при падении электромагнитной волны на границу раздела можно получить мгновенную напряженность компонент с учетом поглощающих свойств пород:
Ну = Нте ^ SHI (^ + ^Не “ Щ

где E me , H me – мгновенная напряженность электрической и магнитной составляющей на границе раздела сред; z – расстояние по оси z.
Волновое сопротивление проводящей среды представляется комплексным числом:
Длина волны в сплошной среде зависит от электрофизических свойств среды и определяется из условия:
Фазовая скорость ЭМ волны в среде также определяется свойствами среды:
и=т=. (8)
На основе уравнений можно сделать вывод, что на электромагнитные волны в горной выработке оказывают влияние не только преграды в виде транспорта и техники, но и горные породы, формирующие стены и свод горной выработки. Для дальнейшего анализа степени этого влияния необходимо определить предельные значения электропроводности, магнитной и диэлектрической проницаемости горных пород, характерных для шахт.
Большую часть горных пород и рудных залежей можно включить в группу полупроводников. Для анализа влияния петрофизических свойств горных пород на электромагнитные поля с диапазоном частот 8÷125 кГц предлагается использовать значения удельной электропроводности σ в пределах 10–3÷5∙10–2 См/м, относительной диэлектрической проницаемости εr в пределах 2÷30. Относительная магнитная проницаемость для большинства горных пород равна 1, исключением являются минералы с высоким содержанием железа [11, 12].
Использование электромагнитного поля VLF–LF-диапазонов для оценки расстояния предусматривает использование магнитной составляющей ЭМ поля ввиду большой длины волны λ=3÷37 км. Для портативной системы определения расстояния необходимо использование компактных передающих и приемных антенн. Этому условию удовлетворяют магнитные антенны в виде многовитковой катушки на ферритовом сердечнике или кольца. Также данный тип антенн близок по распределению магнитного поля к изотропному магнитному излучателю, т.е. излучающему равномерно во всех направлениях. Диаграмма магнитного поля такого излучателя представляет собой сферу, что предпочтительно для определения расстояния между излучателем и приемником по методу RSSI. Моделирование позволит определить зависимость погрешности определения расстояния, вносимой влиянием среды от ее физических свойств и рабочей частоты маяка. Исходя из ограничений требуемой погрешности при поредении расстояния определяется частотный диапазон, при котором погрешность не будет превышать заявленные пределы.
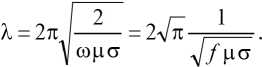
Для реализации магнитного маяка и приемников предлагается использовать ферритовые антенны на сердечнике. Передающая антенна выполнена на базе катушки из 10 витков на ферритовом сердечнике прямоугольного сечения с размерами 20×200×25 мм, относительная магнитная проницаемость материала сердечника μ=700. Площадь поперечного сечения провода S w =0,4 мм2, активное сопротивление катушки R акт =6,5∙10–3 Ом, индуктивность катушки L =24∙10–6 Гн (рис. 1а).
а
б
Рис. 1. Геометрические параметры передающей (а) и приемной (б) магнитных антенн
Fig. 1. Geometric parameters of the transmitting (a) and receiving (б) magnetic antennas
Приемная антенна также выполнена в виде многовитковой катушки из 4000 витков на сердечнике с круглым поперечным сечением 4×50 мм, относительная магнитная проницаемость материала сердечника μ=700, индуктивность приемной антенны L =385∙10–3 Гн (рис. 1б).
Для анализа зависимости распределения и напряженности магнитного поля передающей антенны от частоты и электрофизических свойств окружающей среды необходимо определить параметры физических моделей. Предлагается смоделировать излучение магнитного поля как на поверхности грунта, так и в горной выработке. Также необходимо провести сравнительный анализ влияния транспорта на магнитное поле (распределение в пространстве и напряженность) излучающей антенны в условиях положения на поверхности земли и в горной выработке. Физические процессы, происходящие в тоннеле с транспортом, возможно проанализировать и визуализировать. Для точных оценок распределения электромагнитного поля в горной выработке с учетом влияния транспорта предлагается анализ с использованием математического моделирования методом конечных элементов (МКЭ) как один из математических аппаратов для численного решения, в том числе и физических задач. Метод основан на разбиении исследуемой области на сеточные элементы для решения задачи и аппроксимации производных функции одной или нескольких переменных ее значениями в дискретном множестве аргументов этой функции. Совокупность узлов образует сетку в виде тетраэдров, которые покрывают расчетную область в виде трехмерной модели. Это позволяет получить пространственное распределение напряженностей компонент магнитного поля в поглощающей среде горных пород [13]:
rot /7 = J ,(9)
В = rot A ,(10)
E = -—,(11)
ot
- _ ЯП _
J = cE ~ — + je,(12)
ot где je – плотность электрического тока, внешнего источника (ток антенны); σ – удельная электрическая проводимость; E – напряженность электрического поля; D=ε0εrE – электрическая индукция; ∂D/∂t=Jp – ток смещения; σE=Jс – ток проводимости; H – напряженность магнитного поля; B – магнитная индукция; A – векторный потенциал.
Чтобы получить характеристики электромагнитного поля в пространстве, необходимо указать начальные и граничные условия, такие как петрофизические свойства материалов модели, частота, сила тока и параметры излучающей катушки маяка. К границам раздела сред модели с различными свойствами применяются граничные условия, которые выражаются через нормали:
n^ x(Aj - Л,)-0, (13)
п2х(Н1-Н2) = 0 , (14)
где n 2 – нормаль, направленная наружу от второй среды; A1 , A2 – векторный потенциал в первой и второй среде от границы раздела; H1 , H2 – напряженность магнитного поля в первой и второй среде от границы раздела.
Векторный потенциал определяется волновым уравнением, с временной калибровкой E = ∂ A / ∂t и подстановкой B = ∇ × A в (18–21) [13]:
V х (p^Vx а))+ (J—+ 8^ = °- (15)
v v ” dt dt2
Применение математического моделирования дает численное решение систем дифференциальных уравнений в каждом ее элементе [14, 15].
Для частотного анализа создана модель участка горной породы с размерами 100×60×40 м, по центру которого расположен воздушный тоннель арочного сечения с размерами 4×4 м, ориентированный по оси Х. В центре тоннеля расположена передающая антенна магнитного маяка, также ориентированного горизонтально по оси Х на высоте 1,5 м от пола выработки. Модель передающей антенны установлена перед кузовом модели горнотранспортной техники с габаритными размерами 12×4×2,5 м, имеет свойства описанной ранее магнитной антенны и подключена к источнику тока, подающему его на катушку I =1 А (исследуемый частотный диапазон f =8÷125 кГц). Напряженность и ориентация вектора магнитного поля маяка в пространстве определяется решением уравнений электродинамики с использованием метода конечных элементов ввиду геометрической сложности данной трехмерной задачи и множества граничных условий, а также тонких проводящих границ в виде металлических стенок транспорта. Петрофизические свойства пород заданы следующие:
-
- относительная магнитная проницаемость μ=1;
-
- относительная диэлектрическая проницаемость ε=10;
-
- удельная электропроводность среды σ=0,05–0,001 См/м.
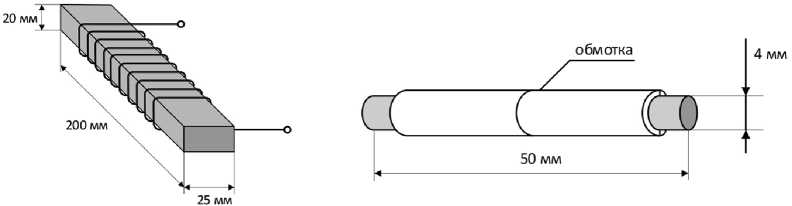
Для анализа влияния электропроводности горных пород на зону покрытия UH рассматриваются случаи вмещающих горных пород (σ=0,001 См/м) и рудных залежей (σ=0,05 См/м). На частоте 8 кГц в рассматриваемом диапазоне электропроводности искажение уровня сигнала незначительно и погрешность составляет менее 1 м (рис. 2а, б). На частоте 35 кГц при повышении σ до 0,05 См/м наблюдается искажение диаграммы магнитного поля, погрешность достигает 1 м на расстоянии 15 м (рис. 2б, в). На частоте 125 кГц при повышении σ до 0,05 См/м диаграмма сокращается вдоль оси расположения передающей антенны (ось Х), погрешность достигает 5 м на расстоянии 20 м (рис. 2д, е).
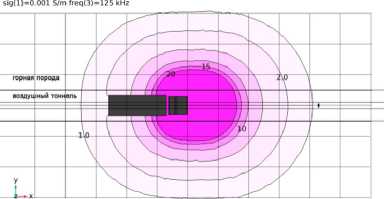
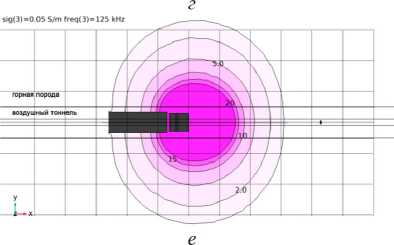
Рис. 2. Распределение уровня сигнала при расположении магнитной антенны на транспорте: а – плоскость XY, f=8 кГц, σ=0,001 См/м; б – плоскость XY, f=8 кГц, σ=0,05 См/м; в – плоскость XY, f=35 кГц, σ=0,001 См/м; г – плоскость XY, f=35 кГц, σ=0,05 См/м; д –плоскость XY, f=125 кГц, σ=0,001 См/м; е – плоскость XY, f=125 кГц, σ=0,05 См/м
Fig. 2. Distribution of the signal level at the location of the magnetic antenna in transport: a – XY plane, f=8 kHz, σ=0.001 Cm/m; б – XY plane, f=8 kHz, σ=0.05 Cm/m; в – XY plane, f=35 kHz, σ=0.001 Cm/m; г – XY plane, f=35 kHz, σ=0.05 Cm/m; д –XY plane, f=125 kHz, σ=0.001 Cm/m; e – XY plane, f=125 kHz, σ=0.05 Cm/m
На графике (рис. 3) показана зависимость уровня сигнала, наведенного на приемной антенне U H от расстояния при удалении приемника от транспорта с маяком. Погрешность определяется от значения σ=10–3 См/м. На частоте 8 кГц погрешность, вносимая повышением электропроводности до 0,05 См/м, увеличивается с расстоянием незначительно и достигает 1 м на отметке 30 м на поверхности и на расстоянии 27 м в горной выработке. Уровень сигнала по пределу чувствительности 1 мкВ в этом случае дает зону покрытия 7–8 м, что является недостаточным при использовании метода RSSI и требует увеличения энергетических параметров канала или повышения чувствительности приемного устройства. При повышении рабочей частоты до 35 кГц погрешность 1 м достигается на расстоянии 19 м на поверхности земли и на 13 м в горной выработке. Уровень сигнала по пределу 1 мкВ дает радиус зоны покрытия 13 м. Повышение частоты до 125 кГц увеличивает зависимость погрешности от расстояния.
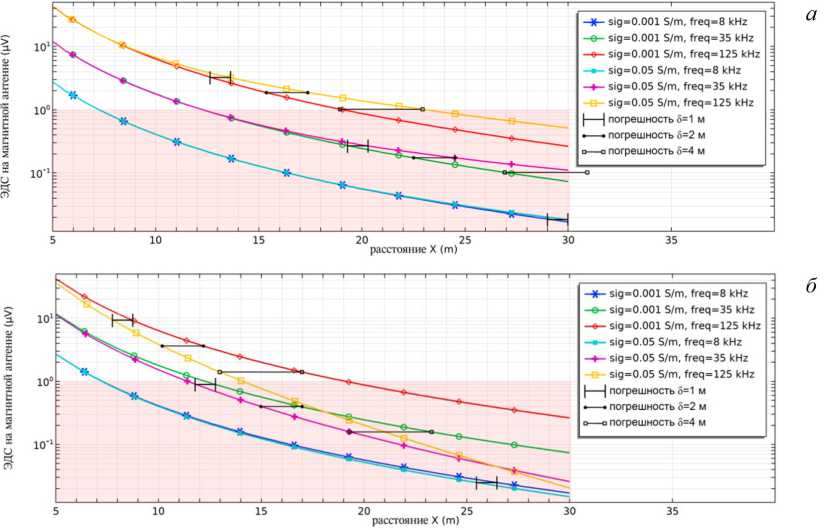
Рис. 3. Зависимость уровня сигнала на приемной антенне UH от расстояния для частот 8 кГц, 35 кГц, 125 кГц и электропроводности 0,001 См/м и 0,05 См/м: а – на поверхности земли; б – в горной выработке
Fig. 3. Dependence of the signal level at the UH receiving antenna on the distance for frequencies 8 kHz, 35 kHz, 125 kHz and electrical conductivity 0.001 Cm/m and 0.05 Cm/m: a – on the earth’s surface; б – in mining
Так, на поверхности погрешность 1 м достигается на расстоянии 13 м, а в горной выработке на расстоянии 9 м. При этом зона покрытия системы увеличивается до 19–23 м на поверхности и до 19–14 м в горной выработке.
Модельный анализ влияния среды на магнитное поле показал, что изменение электропроводности пород является непредсказуемо изменяющимся параметром. Наиболее устойчив к проявлению погрешностей, вызванных свойствами среды, сигнал на частоте 8 кГц (погрешность 1 м достигается на расстоянии 27 м) для условий пород с высокой электропроводностью. Для наиболее распространенных типов горных пород (σ=10–3÷10–2 См/м) частота до 35–40 кГц возможна для использования, однако погрешность в 1 м накапливается на расстоянии 13–15 м при наихудшем случае. Частота 125 кГц показывает наибольшее изменение уровня сигнала и диаграммы магнитного поля при увеличении электропроводности, что делает ее наименее перспективной для использования ввиду слабой устойчивости перед свойствами внешней среды.
Интерпретация и обсуждение результатов исследования
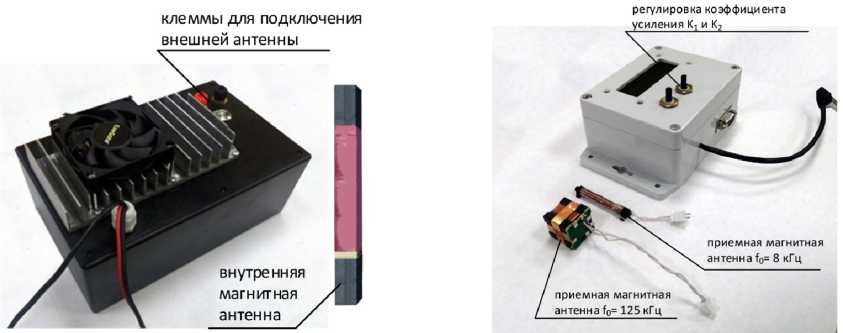
Предлагаемая система использует метод определения расстояния RSSI с применением амплитудной модуляции сигнала. Для этого используются 2 гетеродина для несущей и модулирующей частот, соединенных со смесителем для получения модулированного сигнала (рис. 4). В качестве модулятора с включенными в него гетеродинами в опытном образце используется генератор Agilent 33220A с возможностью его замены на внутренние генераторы сигнала на базе микроконтроллера. Модулированный сигнал (глубина модуляции M=80 %) проходит – 31 – через усилитель (TDA7294) с коэффициентом Kус=30, питающийся от портативной батареи с UП=12 В через источник питания, который формирует биполярное напряжение (±30 В), необходимое для работы выходного усилительного каскада. Выходной сигнал поступает на трансформатор, выполненный на основе сердечника типоразмера PQ35/35, выполняющего функцию согласования выходного каскада усилителя с колебательным контуром излучающей антенны (рис. 1), настроенной на резонансную частоту, соответствующей несущей f0=8 кГц (LА=3,95 мГн, СА=100 нФ). Для расширения экспериментального функционала опытного образца передатчика во вторичной обмотке согласующего трансформатора предусмотрены отводы со следующими коэффициентами трансформации: 1:10, 1:5, 1:3, 1:2, 1:1.
Рис. 4. Структурная схема низкочастотного магнитного передатчика
Fig. 4. Block diagram of a low-frequency magnetic transmitter
В методе RSSI предлагается использование амплитудной модуляции, что решает две основные задачи:
-
1) повышение помехоустойчивости канала связи за счет выделения низкочастотной огибающей и отделения высокочастотной составляющей несущего сигнала в приемном тракте;
-
2) идентификация тага, установленного на кузове транспорта согласно заложенному в алгоритме коду по частоте огибающей.
Определение расстояния также вычисляется через амплитуду огибающей, которая уменьшается пропорционально амплитуде несущего сигнала на выходе приемной магнитной антенны при удалении от излучающей антенны магнитного маяка:
где eL0 – ЭДС в калибровочной точке на расстоянии от излучающей антенны, при котором усилители в приемнике достигают режима ограничения; eизм – ЭДС на выходе приемной антенны.
где U вых.ус – выходное напряжение каскадов усиления; Q – добротность антенны; h эф – эффективная высота приемной антенны; K ус – сквозной коэффициент усиления; K T =10 коэффициент трансформации антенны.
Приемный тракт экспериментального опытного образца включает в себя магнитную ферритовую антенну, настроенную на резонанс несущей частоты f 0 =8 кГц, добротность колебательного контура Q =70. Приемная магнитная антенна представлена в виде многовитко-вой катушки из 4000 витков на базе ферритового сердечника с круглым сечением, d =4 мм, l =50 мм, магнитная проницаемость феррита µ=800. Антенна подключена к усилителю через каскад, обеспечивающий согласование приемного антенного контура с входным сопротивлением усилителя. Режим включения антенного контура – полный. Также согласующий каскад обеспечивает режим работы по постоянному току последующим каскадам усилителя, что минимизирует проявления переходных процессов, так как каскады согласованны друг с другом. Режим полного включения антенного колебательного контура исключает влияние усилительного каскада согласования на добротность Q антенны, большая величина которой обеспечивает приемному тракту узкую полосу пропускания. Это исключает необходимость введения частотно-зависимых элементов в цепи обратной связи усилительных каскадов.
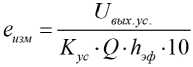
Усилительный тракт включает в себя два каскада усиления, построенных на операционных усилителях, организованных по неинверсной классической схеме включения с изменяемым коэффициентом усиления. Усиленный входной сигнал поступает на АЦП микроконтроллера MCU, где происходит аналого-цифровое преобразование, детектирование и выделение огибающей с последующим вычислением расстояния методом RSSI. Коэффициент усиления каскадов перестраивается микроконтроллером при помощи цифровых потенциометров исходя из значения максимального и минимального уровня сигнала на выходе усилителя. Таким образом, сигнал на выходе усилителя поддерживается на уровне, достаточном для анализа сигнала, и при этом усилитель не входит в режим ограничения. На дисплее выводится частота модулирующего сигнала, размах модулирующего сигнала (амплитуда огибающей является функцией расстояния), число, записанное в регистр потенциометра каждого каскада усиления, которое соответствует определенной величине сопротивления цифрового потенциометра и, соответственно, величине коэффициента усиления.
Использование двух каскадов усиления позволяет получить усилитель с большим динамическим диапазоном K ус =8÷10000 ( k =0÷255), что необходимо для обработки и оцифровки сиг-
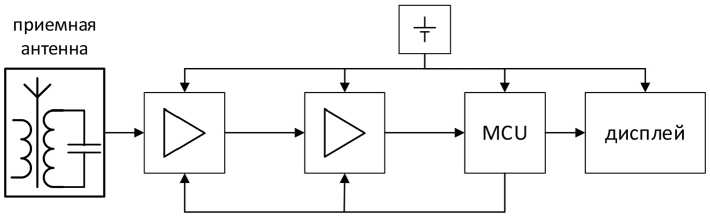
Рис. 5. Структурная схема приемника
Fig. 5. Block diagram of the receiver нала в условиях снижения уровня напряженности магнитного поля с расстоянием по закону H~1/L3. Так, вблизи излучающей антенны сигнал не требует усиления, а при увеличении расстояния между передатчиком и приемником уровень сигнала падает ниже порогового значения и требует усиления для оцифровки и детектирования.
Так как приемный антенный контур является параллельным колебательным контуром, работающим в режиме полного включения, то он подчиняется ряду соотношений. Резонансная частота определяется из уравнения:
fo — 7 1 / 2 n ’ (18)
'° p--RCp где ρ – волновое сопротивление; RLwa1 – активное сопротивление антенны; RCp – активное сопротивление согласующей емкости; LWA1 – индуктивность антенны; CP – величина согласующей емкости антенны.
Волновое сопротивление антенны:
P = ^ , (19)
Добротность антенного контура:
Q = - (20)
R где r = rl+rc– сумма активных потерь.
На рис. 6 показана комлектация передающего (а) и приемного устрйства (б). Передатчик и внутренняя магнитная антенна на базе ферритового сердечника установлены в корпусе, генератор сигнала подключается через разъем. Внешние антенны альтернативных конфигураций
б
Рис. 6. Внешний вид устройств передачи и приема сигнала: а – опытный образец передатчика и передающая магнитная антенна на ферритовом сердечнике; б – опытный образец приемника и приемные ферритовые антенны
Fig. 6. Appearance of signal transmission and reception devices: a – a prototype transmitter and a transmitting magnetic antenna on a ferrite core; б – a prototype receiver and receiving ferrite antennas
– 34 – подключаются через клеммы. Приемное устройство и антенна установлены в корпусе, регулировка коэффициентов усиления производится вручную. На цифровом дисплее отображается информация о частоте принимаемого сигнала и значении коэффициентов усиления, а также напряжения на выходе АЦП приемника. Приемные антенны выполнены для частоты 8 кГц (однокомпонентная в виде одной катушки на 4000 витков) и 125 кГц (трехкомпонентная в виде трех ортогональных катушек из 43 витков каждая).
Эксперимент поставлен с использованием показанных образцов передатчика и приемника. Передающее устройство и передающая антенна укомплектованы в пластиковый корпус и подключены к внешнему генератору Agilent 33220A, который формирует сигнал с амплитудной модуляцией. Частота несущего колебания f 0 =8 кГц, частота модуляции f м =100 Гц, глубина модуляции M=80 %, ток на источнике питания I 0 =1,6 А, напряжение на генераторе U 0 =500 мВ. Передатчик и приемник установлены на одном уровне высоты над поверхностью земли h =1,5 м, передающая и приемная антенны ориентированы по одной оси Х, расстояние между передатчиком и приемником меняется от 0,6 м до 30 м с шагом 1 м. На расстоянии 0,6 м усилительные каскады приемника входят в режим ограничения ( K 1 =0, K 2 =0), что делает это расстояние начальным для измерения уровня сигнала.
В качестве выходных данных получен уровень сигнала на выходе усилителя ( U ус ), детектора ( U д =е изм ), АЦП ( U АЦП ), значение коэффициентов усиления каскада 1 ( K 1 ) и 2 ( K 2 ), значение сопротивления цифровых потенциометров ( R 1 , R 2 ), уровень сигнала на выходе детектора без усиления e изм .
Передающее и приемное устройства устанавливаются на штативы для проведения измерений. Передатчик подключается к источнику питания и внешнему генератору Agilent 33220A. При анализе расстояния на частоте 8 кГц используется антенна на базе ферритового стрежня, установленного внутри корпуса передатчика, а также внешняя антенна, согласованная на частоте 125 кГц. Приемное устройство подключается к выносной антенне, согласованной на частоту 8 кГц и ориентированной сонаправленно излучающей антенне. К выходному порту приемника подключается осциллограф для оценки выходного сигнала и амплитуды огибающей. Начальное значение расстояния для измерения сигнала определяется по режиму ограничения усилителя. Начальное расстояние L 0=0,6 м, которое увеличивалось с шагом 1 м до конечного измерения на расстоянии 30 м. В качестве выходных данных были зафиксированы коэффициенты усиления каскадов и амплитуда огибающей на выходе детектора с использованием осциллографа.
Зависимость амплитуды огибающей на выходе усилителя и детектора без усиления показана на рис. 7. Уровень сигнала по результатам эксперимента определяется достаточным для АЦП и последующей обработки с учетом усиления на расстоянии до 30 м как на 8 кГц, так и на 125 кГц. Зависимости измеренного уровня сигнала от расстояния имеют общую тенденцию с теоретическими данными eэт, без учета влияния грунта и пород. Уровень сигнала на выходе детектора при измерении на частотах 8 и 125 кГц в различных условиях отличается при его сравнении с e 0 в начальной точке на расстоянии L 0. Так, L 0(8_кГц)=0,6 м и L 0 (125_кГц)=1,8 м. На частоте 125 кГц напряжение на выходе детектора выше, чем при использовании частоты 8 кГц, однако это не является решающим параметром при определении расстояния.
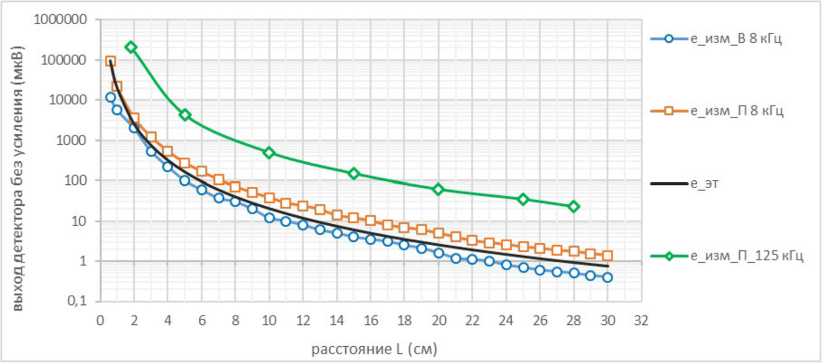
Рис. 7. Измеренный уровень сигнала на выходе детектора без учета усиления
Fig. 7. The measured signal level at the detector output without taking into account the gain
Данные измерения необходимо сравнить с результатами моделирования и эталонным изотропным магнитным излучателем по параметру определения расстояния между передающей антенной и приемником. В качестве начального значения уровня сигнала использовано значение e 0 на расстоянии L 0 , напряженность магнитного поля и сигнала с расстоянием уменьшается по закону ~1/ L 3 .
Используя отношение e0 и измеренного значения e изм на расстоянии L возможно определить этот параметр через соотношение: μ
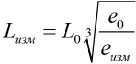
На рис. 8 показаны графики оценки расстояния L изм при увеличении расстояния между передатчиком приемником на расстояние L . При моделировании было использовано переменное магнитное поле на частоте 8 кГц, в эксперименте использовался сигнал с амплитудной модуляцией (несущая частота f 0 =8 кГц, частота огибающей f м =100 Гц, глубина модуляции M=80 %), а также сигнал с частотой несущей 125 кГц. Измерения проводились на частоте 8 кГц на поверхности (Lизм П) и в подземном тоннеле (Lизм В). Измерение на частоте 125 кГц имеет тенденцию к меньшему затуханию с расстоянием при измерении в равных условиях, чем у поля эталонного излучателя e эт , что приводит к ошибке (погрешности) определения расстояния 12 м на расстоянии 28 м, при этом расчетное расстояние (Lизм_П_125 кГц) больше фактического. Данный эффект возможен в результате искажения диаграммы магнитного поля (увеличение напряженности Н над поверхностью) на этой частоте поверхностью грунта. Для остальных случаев измеренное расстояние оказывается меньше эталонного как при моделировании, так и при экспериментальных замерах. Это обосновано поглощающими свойствами среды, вносящей дополнительный фактор затухания, в отличие от L эт , полученной для изотропного магнитного излучателя с учетом закона 1/L 3 и не учитывающей влияние грунта или выработки.
Рис. 8. График зависимости измеренного расстояния от расстояния между передатчиком и приемником для случаев идеального излучателя экспериментальных данных и моделирования
Fig. 8. Graph of the dependence of the measured distance on the distance between the transmitter and receiver for the cases of an ideal emitter of experimental data and modeling
Заключение и выводы
Из моделирования и экспериментальных данных можно вывести, что среда и различные типовые ситуации, такие как смена среды с поверхности на горные выработки, вносят погрешность в определение расстояния между магнитным маяком и приемником. Данные случаи позволяют корректировать эту погрешность поправочными коэффициентами, определяемыми экспериментально или при калибровке системы. Погрешность без возможности корректировки вносит электропроводность горных пород ввиду непредсказуемого характера изменения. Наименьшее влияние уровень сигнала, наведенного на антенне приемника, изменение электропроводности пород, оказывает на частоты менее 40 кГц. Так, сигнал на частоте 8 кГц дает погрешность 1 м на расстоянии 28 м при максимальном разбросе параметра σ=10–3÷10–1 См/м. Процесс калибровки системы позволит использовать низкочастотный метод определения расстояния для предупреждения столкновений транспорта и наезда на персонал. Моделирование указывает, что использование низких частот позволяет максимально снизить слияние горных пород и преград на результат измерения расстояния. Данная система позволяет организовать канал в одном направлении – от маяка на транспорте к более компактному приемнику на теле горнорабочего, в который возможно встроить функцию предупреждения (вибрация, звуковой или световой сигнал) об опасном сближении с транспортом, что наиболее востребовано вне зон прямой видимости (тоннели с поворотами, перепады высот, целики из рудного массива).
Список литературы Оценка эффективности низкочастотных методов измерения расстояния в подземных горных выработках для реализации системы предотвращения столкновений
- Rasche Т. Too Close for Comfort - The Case for Proximity Detection and Vehicle Collision Avoidance Systems. Technical Report. 2009. URL: https://www.qmihsconference.org.au/wp-content/ uploads/qmihsc-2009-writtenpaper-rasche.pdf
- Guidance Note QGN 27 Collision Prevention; Technical Report. Mines Inspectorate of the Department of Natural Resources, Mines and Energy. Melbourne, VIC, Australia, 2017.
- Vehicle Collisions in the Western Australian Mining Industry 2015-16. Technical Report Department ofMines, Industry Regulation and Safety: East Perth, WA, Australia, 2019.
- Guenther N., Salow H. Collision Avoidance and Operator Guidance - Innovating Mine Vehicle Safety. Technical report; SICK: Melbourne, Australia, 2012.
- Li L., Liu H., Xu Y., Zheng Y. Measurement Linearity and Accuracy Optimization for Time-of-Flight Range Imaging Cameras, Proceedings of the 2020 IEEE 4th Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Chongqing, China, 12-14 June 2020. Vol. 1, 520-524.
- Mazomenos E., De lager D., Reeve J., White N. A two-way time offlight ranging scheme for wireless sensor networks, Wireless Sensor Networks. Springer: Berlin/Heidelberg, Germany, 2011; Vol. 6567, 163-178.
- Li В., Zhao K., Shen X. Dilution of Precision in Positioning Systems Using Both Angle of Arrival and Time of Arrival Measurements. IEEE Access 2020, 8, 192506-192516.
- Gendler A., Yaron Peleg S., Amar A. A Diffusion-Based Distributed Time Difference of Arrival Source Positioning, Proceedings of the 2021 IEEE 24th International Conference on Information Fusion (FUSION). Sun City, South Africa, 1-4 November 2021, 1-5.
- Mototolea D., Nicolaescu I., Mindroiu A., Vlasceanu A. Evaluation of Errors Caused by Inaccurate Clock Synchronization in Time Difference of Arrival-Based Localization Systems, Proceedings of the 2019 International Symposium on Signals, Circuits and Systems (ISSCS), Iasi, Romania, 2019, 1-4.
- Демирчян K.C., Нейман Л. P., Коровкин H. В. Чечурин В. Л.. Теоретические основы электротехники. Т. 3,2003 [DemirchyanK. S., NeimanL. R., KorovkinN. V., Chechurin V. L. Theoretical foundations of electrical engineering. Vol.3, 2003 (inRus.)]
- Дортман. Н.Б. Физические свойства горных пород и полезных ископаемых (петрофи-зика). Справочник геофизика. 2-е изд. М.: Недра, 1984. 455 с. [Dortman N. В. Physical properties of rocks and minerals (petrophysics). Geophysicist's Handbook. 2nd ed. Moscow, Nedra. 1984. 455 p. (inRus.)]
- Мельников H.B., Ржевский В. В. Справочник физических свойств горных пород. М.: Недра, 1975. 279 с. [N. V. Melnikov, V. V. Rzhevsky. Directory of physical properties of rocks. Moscow, Nedra, 1975. 279 p. (inRus.)]
- Григорьев А. Д. Методы вычислительной электродинамики. М.: Физматлит, 2012. [Grigoriev A. D. Methods of computational electrodynamics. Moscow, Fizmatlit, 2012 (in Rus.)]
- Matinfara M., Zareamoghaddamb H., Eslamia M., Saeidy M. GMRES implementations and residual smoothing techniques for solving ill-posed linear systems, Computers and Mathematics with Applications, 2012, 63, 1-13.
- Бессонов Л. А. Теоретические основы электротехники. Электромагнитное поле. 10-е изд. М.: Гардарики, 2003 [Bessonov L. A. Theoretical foundations of electrical engineering. Electromagneticfield. 10th ed. Moscow, Gardariki, 2003 (in Rus.)]
