Оценка эффективности высокочастотных методов определения расстояния в условиях шахт

Автор: Краснов Т.В., Кохонькова Е.А., Бурлаков И.Е., Кудинов Д.С.
Журнал: Журнал Сибирского федерального университета. Серия: Техника и технологии @technologies-sfu
Рубрика: Исследования. Проектирование. Опыт эксплуатации
Статья в выпуске: 8 т.16, 2023 года.
Бесплатный доступ
В статье рассматриваются методы определения расстояния с использованием электромагнитных волн С-диапазона (4-8 ГГц) в условиях шахт. Представлен анализ распределения напряженности электрического поля дипольной антенны, установленной на кузов грузовой машины, в горных выработках с переменными свойствами горных пород. Дана характеристика негативных факторов, влияющих на точность определения расстояния методом Time-of-Flight (ToF). Также проведена экспериментальная оценка расстояния между двумя UWB модулями.
Высокие частоты, сверхвысокие частоты, uwb, оценка расстояния, предотвращение столкновений, шахта
Короткий адрес: https://sciup.org/146282766
IDR: 146282766 | УДК: 654.937
Evaluation of the efficiency of high-frequency methods for distance determination in mining conditions
The article discusses methods for determining the distance using electromagnetic waves C-band (4-8 GHz) in mines. An analysis of the distribution of the electric field strength of a dipole antenna mounted on a truck body in mine workings with variable rock properties is presented. The characteristics of the negative factors affecting the accuracy of distance determination by the Time-of- Flight (ToF) method are given. An experimental estimate of the distance between two UWB modules has also been made.
Текст научной статьи Оценка эффективности высокочастотных методов определения расстояния в условиях шахт
Благодарности. Исследование выполнено при финансовой поддержке КГАУ «Красноярский краевой фонд поддержки научной и научно‑технической деятельности» и ООО «Радиотехнические системы» в рамках научного проекта «Разработка системы предупреждения коллизий крупногабаритной горно‑транспортной техники и наезда на персонал на основе комбинированного использования сверхширокополосных СВЧ‑сигналов и низкочастотных электромагнитных волн».
Цитирование: Краснов Т. В. Оценка эффективности высокочастотных методов определения расстояния в условиях шахт / Т. В. Краснов, Е. А. Кохонькова, И. Е. Бурлаков, Д. С. Кудинов // Журн. Сиб. федер. ун‑та. Техника и технологии, 2023, 16(8). С. 986–1000. EDN: IZWHYJ сближения зависит от датчиков, предназначенных для обнаружения объектов. Датчики могут быть визуальными, совмещенными с системами машинного зрения на базе нейросетей (например, видеокамеры), оптическими ультразвуковыми, акустическими или электромагнитными (радар) [7–10]. Любое транспортное средство/инфраструктуру поблизости можно определить заранее и соответствующим образом отправить предупредительные сигналы. Вероятность успешного предотвращения столкновений увеличивается, а проблемы с ложными тревогами также могут быть устранены [12–14].
Подсистемы принятия решений объединяют информацию, полученную от подсистемы обнаружения препятствий, чтобы определить, существует ли опасность столкновения. Если риск столкновения есть, блок информирует подсистему управления вмешательством о необходимости предпринять необходимые действия, чтобы избежать опасности столкновения. В системы принятия решения последние годы активно внедряют анализ с использованием нейронных сетей и машинного обучения [15–17].
Обнаружение приближения является основополагающей системой и может осуществляться с помощью различных методов и алгоритмов измерения дальности или методов позиционирования. Использование стационарных в пространстве базовых станций, которые устанавливаются на перекрестках горных выработок для регистрации подвижных объектов в зоне покрытия, дает точность определения расстояния до десятков сантиметров [18]. Использование GPS на поверхности и в помещениях для позиционирования техники и персонала дает точность до нескольких метров, однако для подземных шахт требуется альтернативный метод, не требующий прямой видимости со спутниками. Также распространено использование портативных датчиков для определения сближения, установленных на корпусе подвижного транспорта и снаряжении рабочих. Для условий шахт наиболее эффективным и быстродействующим является последний метод, не требующий установки базовых станций на обширной площади горных выработок и позволяющий предотвращать столкновение или наезд локально, не используя вычислительные мощности сервера предприятия, соединенного со стационарными базовыми станциями.
Базовым для систем предотвращения столкновений является метод определения расстояния между объектами. В индустрии используются различные технологии обнаружения приближения и алгоритмы определения дальности, наиболее устойчивы к помехам и геометрическим препятствиям радиочастотные методы. Как правило, алгоритмы определения дальности основаны на геометрических параметрах рабочей среды, таких как углы приема сигнала и расстояние между датчиком и объектом. Для удовлетворения различных требований было разработано большое количество алгоритмов определения расстояния [19, 20]. Методы, которые обеспечивают высокую точность и потенциально могут использоваться для обнаружения сближения в подземных условиях, включают несколько основных радиочастотных способов:
-
- анализ разницы во времени прихода волны – Time of Arrival (ToA), Time of Difference Arrival (TDoA);
-
- анализ угла прихода волны Angle of Arrival (AoA);
-
- анализ времени пролета волны – Time of Flight (ToF).
Time of Arrival использует передатчик, три неколлинеарных эталонных приемника и одностороннюю передачу, где целью всегда является передатчик. Поскольку измерения основаны на односторонней передаче, ToA опирается на синхронизацию по времени в передатчиках – 988 – и приемниках, а также на известное местоположение эталонных приемников, что дает высокую точность определения расстояния и радиус действия базовой станции [21]. Требование синхронизации передатчиков и приемников считается основным недостатком систем ToA. Этот метод эффективно работает при использовании множества базовых станций, что не подходит для целей предотвращения столкновений транспорта и горнорабочего в условиях обширных шахт.
Работа Time Difference of Arrival аналогична ToA, однако TDoA использует взаимную корреляцию сигналов на двух эталонных приемниках для измерения расстояния до цели [22]. TDoA имеет те же недостатки, что и ToA, однако дополнительно требует синхронизации по времени эталонных приемников, что увеличивает сложность реализации системы и алгоритмов определения положения с множеством объектов.
Метод Angle of Arrival использует угол прихода сигнала, переданного целью в двух предварительно определенных эталонных узлах, чтобы определить местоположение объекта. Измерение углов основано на антенных решетках. Цель должна лежать в точке пересечения двух направляющих линий, образованных углами прихода, определяемых каждым опорным узлом. Однако точность механизма AoA, используемого в устройствах Bluetooth, не так высока в сравнении с альтернативой, показанной ранее. Для работы метода требуется открытое пространство и эталонные стационарные приемопередатчики, что не выполняет цели предотвращения столкновений техники и персонала в условиях шахт.
Принцип работы метода Time of Flight заключается в анализе времени пролета электромагнитной волны через пространство для вычисления расстояния, используя постоянную величину скорости распространения волны в воздухе, которая не подвержена искажениям. Приемопередатчики обмениваются данными о метках времени для вычисления времени пролета электромагнитной волны. Двусторонняя дальность (DS‑TWR) заключается в двух измерениях времени прохождения сигнала к метке и обратно, данные используются и объединяются для получения времени пролета. Устройство A инициирует первое двустороннее измерение, на которое отвечает устройство B, после чего устройство B инициирует второе двунаправленное измерение, на которое отвечает устройство A, завершая полный обмен. Каждое устройство точно отмечает время передачи и приема сообщений. Четыре сообщения DS‑TWR можно сократить до трех сообщений, используя ответ первого измерения приема‑передачи в качестве инициатора второго измерения приема‑передачи. Это показано на рис. 1, TX – процесс передачи сигнала, RX – процесс приема сигнала. Время пролета вычисляется по формуле [23]:

где T round1 , T round2 – время отправления запроса базовой станции и метки; T reply1 , T reply2 – время ответа базовой станции и метки.
Анализируя приведенные данные, можно вывести, что для каждого рассматриваемого метода характерно низкое энергопотребление и большой радиус действия. Однако метод ToF обладает несколькими преимуществами. Точность определения местоположения методом ToF выше, чем у метода AoA, также метод ToF не требует синхронизации устройств, в отличие от метода TDoA, что позволяет упростить коммуникацию между метками и является более простым с точки зрения реализации алгоритма определения местоположения. Метод ToF – 989 –
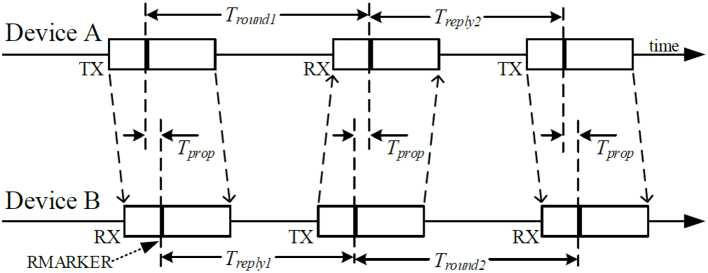
Рис. 1. Двустороннее определение расстояния тремя сообщениями
Fig. 1. Two-way distance detection by three messages в сравнении с AoA не предъявляет жестких конструктивных требований к используемой антенне, что упрощает разработку устройств.
Метод Time of Flight возможно реализовать на базе Bluetooth, Wi‑Fi‑ и UWB‑модулей. Технология UWB дает наибольшую точность в определении расстояния и обеспечивает наибольшую зону покрытия (дальность), а также устойчив к многолучевому распространению сигнала, что является основополагающим параметром. Этот метод возможно реализовать при помощи компактных модулей, включенных в приемопередатчики на корпусе подвижной техники и в снаряжении рабочего. Для дальнейшего анализа необходимо оценить влияние стен горных выработок, транспорта и тела человека на электромагнитное поле UWB‑модулей.
Методы исследования
Для целей обнаружения сближения с применением высокочастотных диапазонов в качестве технической базы предлагается применение UWB‑модулей со встроенной антенной (рис. 2) и метод определения расстояния Time of Flight (ToF), требующий активного ответа, а также обмена дынными между базовой станцией и носимой меткой шахтера. Питание обеспечивается от внешних источников. Время системы для измерения расстояния задается тактовым генератором и контроллером состояний, связь модуля с внешними устройствами обеспечивается через хост‑интерфейс SPI (Serial Peripheral Bus) [14]. Антенна модуля работает как
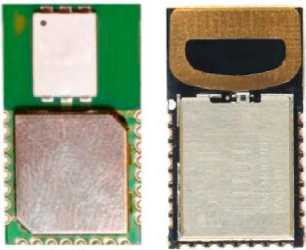
Рис. 2. Платы UWB‑модулей со встроенными антеннами DWM1000 и DWM1001
Fig. 2. UWB module boards with built‑in DWM1000 and DWM1001 antennas приемная и передающая, диаграмма направленности соответствует дипольной антенне без усиления, что позволяет передавать сигнал во всех направлениях.
UWB‑модуль работает только с импульсными сигналами в диапазоне частот от 3,5 до 6,5 ГГц, ширина канала 500 МГц, что дает возможность генерировать короткие импульсы, позволяющие уменьшить влияние помех, вызванных многолучевым распространением сигнала. Модуль DWM1000 имеет структуру, показанную на рис. 3, и включает в себя следующие элементы:
– Аналоговый приемник выполняет функцию усиления принятого сигнала и понижения частоты для дальнейшего преобразования. Приемник оптимизирован для обеспечения широкой полосы пропускания и подавления шумов. Полученный сигнал демодулируется и преобразуется в цифровую последовательность.
– Аналоговый передатчик – генерирует последовательность импульсов путем подачи передаваемых данных в цифровом виде на генератор аналоговых импульсов. Последовательность импульсов преобразуется с повышением частоты, полученный сигнал усиливается и передается на антенну.
– Генератор тактовых сигналов / ФАПЧ (фазовая автоподстройка частоты) – используется для повышения частоты передаваемого и понижения принятого сигнала соответственно.
– Цифровой приемопередатчик содержит в себе модули помехоустойчивого кодирования и декодирования, а также модули с настройкой приемника и передатчика.
– Интерфейс SPI необходим для взаимодействия с микроконтроллером. Через него происходит настройка модуля и передача данных на микроконтроллер.
– Контроллер состояний и модуль управления питанием необходимы для регулирования энергопотребления микросхемы в его различных рабочих режимах (прием, передача, инициализация, сон, глубокий сон и т.д.).
При падении радиоволны на границу раздела двух сред, в данном случае воздух/горная порода, может происходить отражение и преломление волны. Направление падающей волны определяется углом θ с нормалью к поверхности, направление отраженной волны углом θ´, преломленной волны – углом ψ. Связь между этими углами определяется соотношениями [24]:
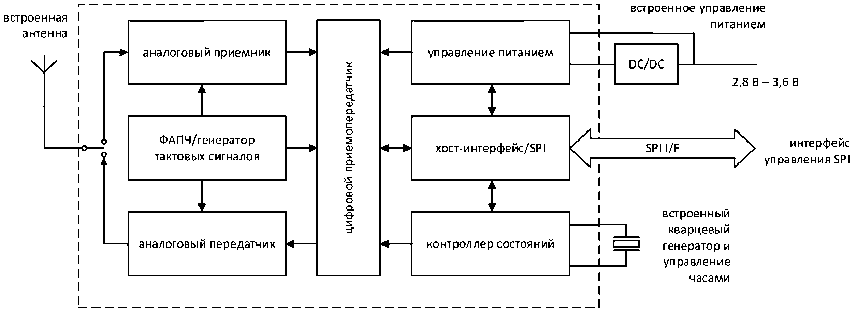
Рис. 3. Структурная схема UWB‑модуля
Fig. 3. Block diagram of the UWB module к, = sin0 = sin0' = k2 = siny . (2)
ЭМ волны на границе двух сред подчиняются двум законам:
-
1. Угол падения равен углу отражения θ=θ´;
-
2. Отношение синусов углов падения и преломления обратно пропорционально отношению волновых чисел k или показателей преломления n в соответствующих средах:
sin 9 k2 n2 ^е2^э sinty кг и, ^ц.
где ε 1 , ε 2 , μ 1 , μ 2 – диэлектрическая и магнитная проницаемость среды 1 и среды 2.
Коэффициент отражения для вертикальной поляризации вычисляется из соотношения
[24]:
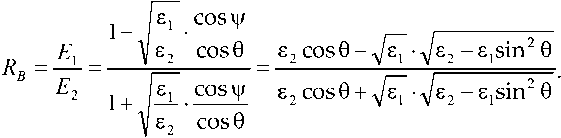
Этот параметр зависит от угла падения волны на поверхность в случаях, когда первая среда обладает меньшим или большим значением ε, чем вторая среда. Выражение для определения коэффициента отражения горизонтально поляризованной волны:
При падении волны на границу воздуха с проводящей средой параметр ε преобразуется в комплексный 8. Коэффициент отражения также становится комплексным R =| R | e – j Ф . Также этот параметр зависит от частоты, как и 8.
На расстоянии h от поверхности электрическая составляющая электромагнитного поля определяется через соотношение [24]:
Е1=\К\Етсо$\ю1-Ф- — —^—\ . (6)
-
1 I I ( x cos0)
Произвольная линейная поляризация включает в себя как горизонтальную, так и вертикальную составляющие EВ = E cosξ и EГ = E sinξ, где ξ – угол поляризации между E и вертикальной плоскостью. Для каждой из составляющих определяются коэффициенты отражения и напряженности поля [24]:
E\b = \Rb \E cos ^соз(го/-Ф5) , (7)
£1Г = /?, |£sin ccos(m/-Ol ), (8)
где RВ =| RВ | e–iФ , RГ =| RГ | e–iФ .
При падении ЭМ волн на неровную поверхность возникает эффект диффузного отражения. Они отражаются в различных направлениях, что создает рассеяние, при котором напряженность отраженной волны меньше, чем при отражении от идеально ровной поверхности. Эффективная величина коэффициента отражения при неровной поверхности отличается – 992 – от случая идеально ровной. Эта разница увеличивается с ростом частоты ЭМ волны и угла падения на поверхность. Отражение имеет характеристику диффузного, если неровности поверхности имеют порядок длины волны и имеют неупорядоченный характер. Часть волны отражается на нижнем уровне неровностей, а часть на верхнем. Также часть неровности перпендикулярна к направлению падения волны. Наибольшая разность фаз определяется между волнами, отраженными от верхнего и нижнего уровня неровности. Разность хода лучей в этом случае составляет:
-
2 AB = 2h cos ф
где h – высота неровности; φ – угол падения волны на поверхность; Это приводит к сдвигу фаз между лучами:
, 2k
Аф = — 2h С05ф.
Если фазовые искажения не превышают π/2, то волну можно считать плоской и влиянием неровностей на поверхности можно пренебречь. Основным параметром влияния неровности поверхности является критерий Рэлея:
где λ – длина волны.
Расчет коэффициента отражения в таком случае является весьма сложной задачей, для которой применяются методы приближения к реальной поверхности путем представления ее в виде синусоидальной или поверхности, покрытой полусферами. В дециметровом и сантиметровом диапазоне коэффициент отражения обычно определяется экспериментально.
Моделирование при помощи метода конечных элементов позволяет определить влияние стенок горных выработок со свойствами горных пород, а также транспорта и тела человека на электромагнитные волны высокочастотных диапазонов. Это позволяет отслеживать влияние электропроводности и диэлектрической проницаемости пород на распространение ЭМ волн в выработке [25]. Для анализа распространения высокочастотных ЭМ волн в среде необходимо численное решение уравнения:
I^Vx^xE)-^2 8,. —— E = 0, (12)
V C£)So)
M - --- -- т>/-*ттттгмэг^о f 1 __ л где ^0 ^д/^О^О – волновое число; – оператор набла; с0 – скорость света.
с0 бу 6z]
Для имитации открытого пространства для внешних границ модели вводится граничное условие:
пхЕ = 0
На границах металлоконструкций и корпуса транспорта используется граничное условие перехода для имитации тонких металлических оболочек. Он представляет собой разрыв в тангенциальном электрическом поле. Математически это описывается соотношением между – 993 – мгновенным изменением электрического поля и плотностью индуцированного поверхностно-
Для анализа отраженных волн на границах воздушной среды и горной породы с неровным рельефом используется граничное условие импеданса:
Это условие используется, если известно, что поле проникает в среду только на небольшое расстояние за пределы границы. Свойства материала относятся к области вне границы. Требование, чтобы это базовое условие было действительным приближением, состоит в том, что величина комплексного показателя преломления определяется как:
где µ 1 и ε 1 – магнитная и диэлектрическая проницаемости пород; µ и ε с – магнитная и диэлектрическая проницаемости воздуха.
Для моделирования была создана двухмерная модель горной выработки с излучателем в виде электрического диполя, установленного на передней части кабины грузового транспорта. Размеры модели указаны на схеме (рис. 4). Границы, представляющие стенки транспортного средства, имеют свойства стали толщиной 3 мм. Горной породе присвоено значение магнитной проницаемости μ=1, электропроводности σ =0,01 См/м, диэлектрической проницаемости ε=10. Ширина горной выработки 4 м, стены с неровным рельефом, имитирующим горные выработки, имеется поворот под углом 90º. Свойства тела горнорабочего, находящегося на пути распространения ЭМ поля, не меняются: μ=1, σ=0,66 См/м, ε=60 [26]. Ток, протекающий в диполе I0 =0,05 мА, исследуемая частота f0 =6,5 ГГц.
Технология ToF требует взаимодействия обоих модулей (на корпусе транспорта и на теле рабочего) в режиме приема и передачи для обмена данными. Моделирование было проведено для ряда случаев, представляющих наиболее распространенные ситуации при взаимодействии UWB‑модулей в горных выработках (рис. 4):
-
1. Передача в режиме прямой видимости LOS (Line of Sight) – первый модуль расположен перед корпусом грузовой машины на расстоянии 10 см (точка 1), второй модуль расположен на торсе человека на расстоянии 24 м в режиме прямой видимости с первым модулем (точка 2);
-
2. Передача в режиме LOS – первый модуль расположен перед корпусом грузовой машины, второй модуль расположен на плече человека (правом и левом) в режиме прямой видимости с первым модулем на расстоянии 24 м (точка 3);
-
3. Передача в режиме NLOS (non‑line of sight) – первый модуль установлен перед корпусом грузовой машины, второй модуль на торсе человека, расположенного в тоннеле за поворотом на расстоянии 6 м (точка 4);
-
4. Передача в режиме NLOS – первый модуль установлен перед корпусом грузовой машины, второй модуль на плече человека (правом и левом), расположенного в тоннеле за поворотом на расстоянии 6 м (точка 5).
Эксперимент был реализован для случаев открытого пространства на поверхности земли и в условиях замкнутого пространства в пределах прямой видимости. Базовая станция, содержащая микроконтроллер, соединенный с модулем UWB сверхширокополосного приемопередатчика DWM 1000 или DWM 1001, работающим на частоте 6,5 ГГц и содержащем встроенную антенну (рис. 5). Приемопередатчик соединен по USB с ноутбуком PC для записи результатов измерения. Носимая метка идентична по строению с базовой станцией и также осуществляет прием и передачу меток времени для определения расстояния.
Базовая станция и метка устанавливаются на нижнюю часть штативов, на верхней части штативов закреплены модули лазерного дальномера для контрольного измерения расстояния между UWB‑модулями. Базовая станция подключена к ноутбуку по USB и стационарна, штатив с носимой меткой перемещается на расстояние от 0,2 до 50 м с шагом от 0,1 до 5 м. На каждой итерации измерения расстояния было произведено 1000 записей значения расстояния для последующего усреднения, данные измерения записывались в соответствующий файл с отметкой данных, измеренных лазерным дальномером. Идентичные измерения были произведены в ограниченном пространстве с удалением от базовой станции на расстояние до 20 м.
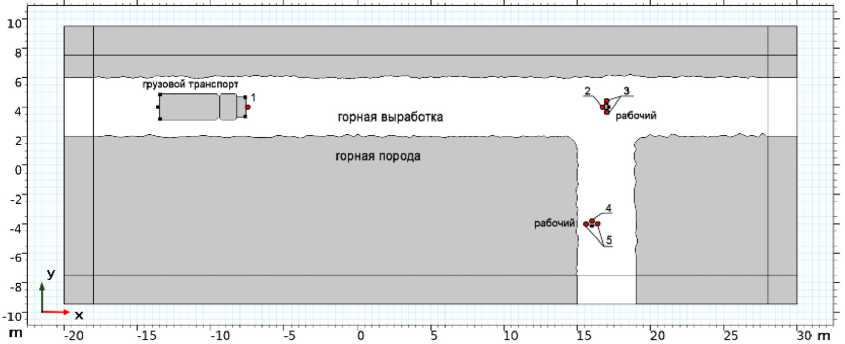
Рис. 4. Схема модели горной выработки
Fig. 4. Scheme of the mining model
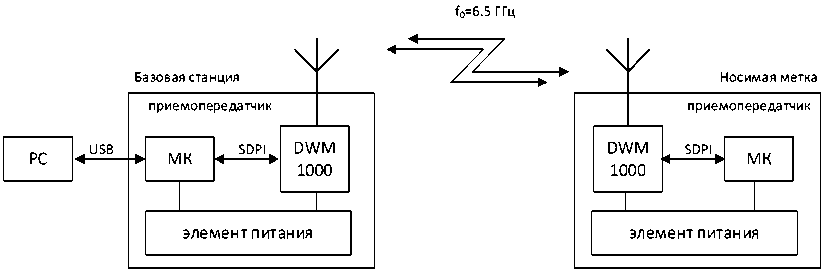
Рис. 5. Структурная схема способа измерения расстояния методом ToF
-
Fig. 5. Block diagram of the ToF distance measurement method
Обсуждение результатов исследования
В ходе моделирования были получены результаты, показывающие распределение электрического поля с частотой 6,5 ГГц в условиях горной выработки для ряда возможных ситуаций, указанных ранее (рис. 6). При установке источника излучения на передней части корпуса транспорта (рис. 6а) основная часть электрического поля отражается перед машиной, в области между боковыми частями и стенами выработки и за ней наблюдаются лишь отраженные волны (уровень E x падает ниже –55 дБ). В зоне прямой видимости явно выра-

а б

в
г
Рис. 6. Распределение электрического поля дипольной антенны в модели горной выработки: а – передающий модуль установлен на корпусе транспорта; б – передающий модуль установлен на плече человека в зоне прямой видимости транспорта (режим LOS); в – передающий модуль установлен на торсе человека вне прямой видимости (режим NLOS); г – передающий модуль установлен на плече человека (режим NLOS)
-
Fig. 6. Distribution of the electric field of the dipole antenna in the mining model: a – the transmitting module is mounted on the vehicle body; б – the transmitting module is mounted on the shoulder of a person in the line of sight of the vehicle (LOS mode); в – the transmitting module is mounted on the torso of a person out of line of sight (NLOS mode); г – the transmitting module is installed on a person’s shoulder (NLOS mode)
жено явление многолучевости, а также интерференционные минимумы и максимумы, распределенные в пространстве тоннеля, однако ширина полосы 500 МГц и малые размеры этих зон (10–20 см) компенсируют их влияние на уровень принятого сигнала. На расстоянии 25 м в зоне LOS напряженность электрического поля E z ослабевает на 37 дБ, в зоне NLOS на суммарном расстоянии 25 м Ez ослабевает на 55 дБ в отраженных от стен лучах и более 60 дБ вне этих областей. В целом при потере прямой видимости возможно принять лишь отраженные от стен и углов волны, что увеличивает время пролета волны и вносит неопределенность в расчет расстояния. Также ярко выражено негативное влияние тела человека на пути распространения сигнала ввиду его электрофизических свойств, что создает «тень» на длину 0,5–1 м. Размещение точки излучения на плече человека в зоне LOS, расположенного на перекрестке, показывает, что тело также искажает диаграмму направленности, отражая основную часть излучения в боковой тоннель (рис. 6б). Так, в области грузовой машины уровень Ez падает на 50 дБ, однако точка излучения находится в прямой видимости, и расстояние может быть определено с минимальной погрешностью ввиду работы UWB в импульсном режиме. При расположении активной точки на торсе или плече человека в зоне NLOS основная энергия излучения рассеивается в зоне прямой видимости, и уровень E z в области грузовой машины ослабевает на 60–65 дБ, что может негативно повлиять на стабильность канала. В этом случае расстояние между модулями определяется не верно. Так, прямое расстояние между точками измерения 24 м, расстояние при следовании по выработке 29 м, а расстояние пролета луча составляет 34–36 м.
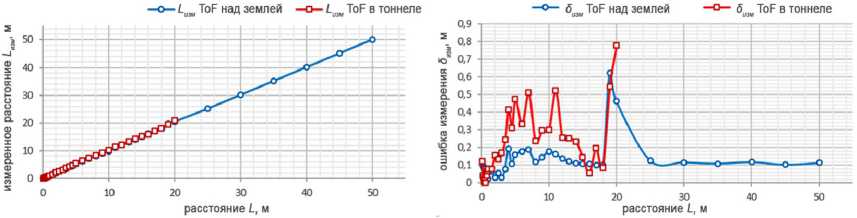
В результате эксперимента были получены графики зависимости измеренного расстояния с использованием UWB‑модулей от расстояния между штативами. Также были получены значения погрешности измерения расстояния (рис. 7). Нестабильное значение погрешности, достигающее 0,2–0,6 м, наблюдается в открытом пространстве над поверхностью грунта на расстоянии от 0,2 до 20 м, при измерении в замкнутом пространстве оно повышается до 0,5–0,8 м. При увеличении расстояния более 20 м погрешность для открытого пространства устанавливается на уровне 0,1 м, составляет менее 1 %. Технология UWB обеспечивает высокую точность измерения расстояния, однако отражения волн от стенок, интерференционные явления
а б
Рис. 7. Зависимость измеренного расстояния методом ToF (а) и погрешность измерения (б) от расстояния между передатчиком и приемником
Fig. 7. The dependence of the measured distance by the ToF method (a) and the measurement error (б) on the distance between the transmitter and receiver и требование прямой видимости между базовой станцией и индивидуальной меткой подразумевают совмещение этой технологии с методом определения расстояния, устойчивым перед влиянием горных пород на близком расстоянии менее 30 м.
Технология ToF на базе UWB обладает малым энергопотреблением, устойчива перед амплитудными и фазовыми искажениями, а также явлением многолучевости, что позволяет использовать ее в условиях прямой видимости для регистрации носимой транспортом или шахтером метки в зоне до 50 м с точностью до 1 м. Однако переотражения и явление многолучевости вносит погрешность в определение расстояния этим методом, также для метода характерно недостоверное определение расстояния в случае потери прямой видимости (шахтер находится за поворотом) ввиду обмена данными между базовой станцией на транспорте и носимой меткой. В наихудшем случае обеспечивается прием лишь отраженных от стен волн, имеющих не стабильный характер как во времени, так и в пространстве, также это увеличивает путь пробега волны, что приводит к неверному определению расстояния. Высокочастотный метод требует совмещения со способами определения расстояния, устойчивыми перед влиянием преград и горных пород.
Выводы
Диэлектрическая проницаемость пород влияет на соотношение энергии преломленной и отраженной волн, что дает преимущество по параметру уровня сигнала в выработке даже при условиях незначительных изгибов тоннеля и неровностей рельефа стенок и свода. Однако множественные переотражения сигнала провоцируют появление зон интерференционных максимумов и минимумов ввиду наложения волн, а также путь и время пролета волны увеличивается, влияет на погрешность определения расстояния для случаев, отличных от прямой видимости между передатчиком и приемным устройством. В случае прямой видимости канал для определения расстояния методом ToF с использованием UWB‑модулей на частоте 6,5 ГГц дает высокую стабильность по уровню сигнала с учетом влияния неровного рельефа стенок горных выработок. Однако в зонах без прямой видимости в виде поворотов тоннеля и преград, таких как шахтное оборудование и целики из горной породы, радиочастотным методам требуется совмещение с альтернативными способами определения расстояния, устойчивыми перед влиянием горных пород.
Список литературы Оценка эффективности высокочастотных методов определения расстояния в условиях шахт
- Permana H. Risk assessment as a strategy to prevent mine accidents in Indonesian mining. Rev. Min. 2010, 4, 43-50.
- Kizil M. Virtual Reality Applications in the Australian Minerals Industry; South African Institute of Mining and Metallurgy: Johannesburg, South Africa, 2003. 569-574.
- Kazan E., Usmen, M. A. Worker safety and injury severity analysis of earthmoving equipment accidents. J. Saf. Res. 2018, 65, 73-81.
- Squelch A. P. Virtual reality for mine safety training in South Africa. J. S. Afr. Inst. Min. Metall. 2001, 101, 209-216.
- Fitch S.M., Newsom S. A., Kim J. H. Effect ofwhole-body vibration exposures on physiological stresses: Mining heavy equipment applications. Appl. Ergon. 2020, 85, 103065.
- Domingues M.S., Baptista A. L., Diogo, M. T. Engineering complex systems applied to risk management in the mining industry. Int. J. Min. Sci. Technol. 2017, 27, 611-616.
- Mohamed Imam, Karim Bai'na. The Future of Mine Safety: A Comprehensive Review of AntiCollision Systems Based on Computer Vision in Underground Mines. Sensors 2023, 23(9), 4294.
- Shuo Jiang, Bo Liu. Absolute Distance Measurement Using Frequency-Scanning Interferometry Based on Hilbert Phase Subdivision. Sensors 2019, 19(23), 5132
- Fuad Aliew. An Approach for Precise Distance Measuring Using Ultrasonic Sensors. Eng. Proc. 2022, 24(1).
- Ali R., Liu R., He Y., Nayyar A., Qureshi B. Systematic Review of Dynamic Multi-Object Identification and Localization: Techniques and Technologies. IEEE Access 2021, 9, 122924-122950.
- Lewen Yu et al. Research on Anti-collision Method of Trackless Equipment in Underground Mine. 2020 J. Phys.: Conf. Ser. 1626.
- Guenther, N., Salow H. Collision Avoidance and Operator Guidance - Innovating Mine Vehicle Safety. Technical report. SICK: Melbourne, Australia, 2012.
- Zhou Z., Zhang J., Gong C. Automatic detection method of tunnel lining multi-defects via an enhanced You Only Look Once network. Comput.-Aided Civ. Infrastruct. Eng. 2022, 37, 762-780.
- Kai H., Xianmin M. Research on avoidance obstacle strategy of coal underground inspection robot based on binocular vision. In Proceedings of the 2017 29th Chinese Control And Decision Conference (CCDC), Chongqing, China, 28-30 May 2017; 6732-6737.
- Dong Xiao et al. An Anti-collision Early Warning System for Mine Trucks Based on RBF Network and Wi-Fi. J. Phys.: Conf. Ser. 1631. 2020.
- Rongxia Wang, Malik Bader Alazzam. Innovative Research of Trajectory Prediction Algorithm Based on Deep Learning in Car Network Collision Detection and Early Warning System. Mobile Information Systems. Vol. 2021.
- Abu Jafar Md Muzahid, Syafiq Fauzi Kamarulzaman. Multiple vehicle cooperation and collision avoidance in automated vehicles: surveyand an AI-enabled conceptual framework. Scientific Reports, Vol. 13, Article number: 603, 2023.
- Lewen Yu, Kai Zhan and Da Zhang. Research on Anti-collision Method of Trackless Equipment in Underground Mine. J. Phys.: Conf. Ser. 1626. 2020.
- Ali R., Liu R., He Y., Nayyar A., Qureshi B. Systematic Review of Dynamic Multi-Object Identification and Localization: Techniques and Technologies. IEEE Access 2021, 9. 122924-122950.
- Sivasakthiselvan S., Nagarajan V., Localization Techniques ofWireless Sensor Networks: A Review. In Proceedings of the 2020 International Conference on Communication and Signal Processing (ICCSP), Chennai, India, 2020. 1643-1648.
- Li B., Zhao K., Shen X. Dilution of Precision in Positioning Systems Using Both Angle of Arrival and Time of Arrival Measurements. IEEE Access 2020, 8. 192506-192516.
- Gendler A., Yaron Peleg S., Amar A. A Diffusion-Based Distributed Time Difference of Arrival Source Positioning. In Proceedings of the 2021 IEEE 24th International Conference on Information Fusion (FUSION), Sun City, South Africa, 2021. 1-5.
- DWM1000 Datasheet. IEEE 802.15.4-2011 UWB Transceiver Module. Version 2.18
- Грудницкая Г. П. Распространение радиоволн. 1967, 244 [Grudnitskaya G. P. Propagation of radio waves. 1967, 244 (in Rus.)].
- Жданов М. С. Геофизическая электромагнитная теория и методы. Пер. с англ. Под ред. Е. П. Велихова. М.: Научный мир. 2012. 680 [Zhdanov M. S. Geophysical electromagnetic theory and methods. Ed. E. P. Velikhova. Moscow. Nauchnyj mir. 2012. 680 (in Rus.)].
- Мустафаев Р.А., Кривцов В. Г. Мустарьев Р. А. Физика: Высшая школа, 1989. 168 [R. A. Mustafaev, V. G. Krivtsov. R. A. Mustar'ev. Physics.Vysshaya shkola, 1989. 168. (in Rus.)].
