Оценка качества управления по отклонениям от прицельной линии

Автор: Агарков Сергей Анатольевич
Журнал: Вестник Мурманского государственного технического университета @vestnik-mstu
Рубрика: Транспорт
Статья в выпуске: 4 т.18, 2015 года.
Бесплатный доступ
Проведена оценка качества управления танкером по отклонениям двух разнесенных точек ДП от прицельной линии. Способ используется при исследовании инновационного принципа управления по отклонениям для сравнения различных вариантов реализации этого принципа. Предложенные критерии показали их согласие с интуитивной оценкой качества управления по виду траекторий
Компьютерное моделирование, моделирование движения судна, влияние ветра, моделирование подруливающего устройства, математическая модель
Короткий адрес: https://sciup.org/14294840
IDR: 14294840
Evaluation of control quality by deviations from the sighting line
Evaluation of the tanker management by deviations of two spaced points on the center plane of the sighting line has been carried out. The method is used while studying the innovative principle of management by deviations to compare different ways for this principle implementation. The proposed criteria have indicated agreement with the intuitive assessment of management quality by trajectories' type
Текст научной статьи Оценка качества управления по отклонениям от прицельной линии
Оценка качества управления – это важный этап изучения любого нового способа, предлагаемого в области судовождения. В проведении модельных испытаний при исследовании принципа управления по отклонениям от прицельных линий одной из задач является сравнение различных способов реализации данного инновационного принципа [1–8]. Это приводит к необходимости введения определенных количественных показателей – критериев качества управления.
Из возможных критериев качества управления [9, 10] мы выбрали два – Q 1 и Q 2 , несколько модифицировав их структуру и, соответственно, содержание. Мы уже использовали их ранее в работе [11], в этот раз будем использовать не сами параметры движения, а их производные. Это позволит оценить и динамику процесса управления.
В критерии Q 1 возьмем производную курса судна по времени:
Q i= I ^ [ dK / dt ] k . (1)
k
В критерии (1) dK k / dt – значение производной курса в k -й момент его регистрации.
Критерий Q 2 также преобразуем к форме с участием производных отклонений носа и кормы танкера:
Q 2 = , I£[К / dt ) 2 + (( d k / dt ) 2 )] . (2)
k
В критерии (2) d n и d k – расстояния носовой и кормовой точек танкера до прицельной линии, от которых взяты производные по времени. Чтобы эти критерии сделать объективными характеристиками, суммы всех опытных точек отнесем к одной точке, для чего суммы поделим на общее число точек испытания. Критерии можно также нормировать, поделив Q 1 на начальный курс судна, а критерий Q 2 – на половину длины танкера. Это сделает критерии Q 1 и Q 2 практически безразмерными и позволит сравнивать результаты модельных испытаний разных судов. Применим эти два критерия при проведении модельных испытаний судна, сравнивая полученные результаты моделирования.
Модельные испытания
Проведем испытания модели танкера ледового класса проекта Aker ACS 650 при различных значениях предельной тяги подруливающих устройств. Они выполнены для шести различных значений предельной тяги Т . На рис. 1 показаны три траектории из этой серии испытаний для значений предельной тяги 20, 40 и 60 кН.
Одновременно в каждом испытании вычислялись критерии Q 1 и Q 2 . Импульс тяги dT , т. е. разовое секундное изменение тяги, был выбран при этом равным 2 кН. Результаты вычислений приведены в табл. 1. Зависимость обоих критериев от величины тяги монотонная, но разнонаправленная. Критерий Q 1 растет с увеличением тяги Т , критерий Q 2 убывает. Поэтому наилучшим по комбинации критериев является промежуточное значение максимальной тяги, оно выбрано нами равным 20 кН. С этим значением предельной тяги Т = 20 кН были выполнены последующие испытания.
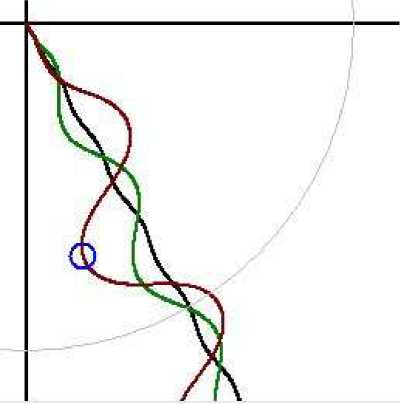
Рис. 1. Траектории танкера (левое поле) при различных величинах предельной тяги ПУ: 20 кН (черная), 40 кН (зеленая) и 60 кН (красная). На поле справа – положение танкера относительно сторон света для его координатного положения на красной траектории (синий кружок)
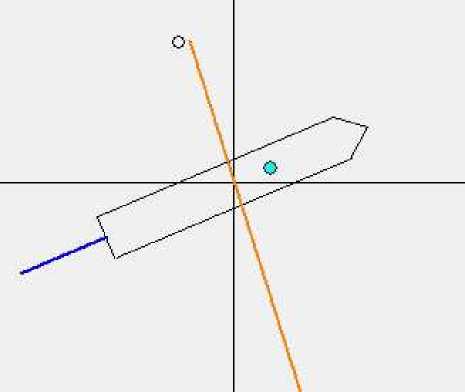
Таблица 1
Критерии качества управления для шести значений предельных тяг ПУ ( dT = 2 кН, число точек 1 500)
|
T , кН |
10 |
20 |
30 |
40 |
50 |
60 |
|
Q 1 |
0.0177 |
0.0447 |
0.0746 |
0.1873 |
0.2705 |
1.2334 |
|
Q 2 ×10 |
0.0041 |
0.0054 |
0.0067 |
0.0076 |
0.0085 |
0.0093 |
Следующая серия испытаний была проведена при постоянной предельной тяге ПУ и изменении импульса dT , на величину которого изменяется тяга при действии управления.
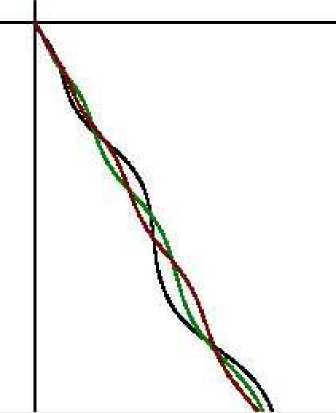
Рис. 2. Траектории танкера при различных величинах импульса тяги ПУ:
1 кН (черная), 2 кН (зеленая) и 3 кН (красная). Тяга Т = 30 кН
Нами было проведено шесть испытаний, для трех из них на рис. 2 изображены траектории.
Одновременно вычислялись и критерии качества, значения которых приведены в табл. 2.
Таблица 2
Критерии качества управления для шести значений импульсов тяг ПУ ( T = 30 кН, число точек 1 500)
|
dT , кН |
0.5 |
1.0 |
1.5 |
2.0 |
2.5 |
3.0 |
|
Q 1 |
0.1697 |
0.1018 |
0.0746 |
0.0612 |
0.0508 |
0.0449 |
|
Q 2 |
0.0065 |
0.0064 |
0.0063 |
0.0062 |
0.0061 |
0.0059 |
Результаты табл. 1 и 2 были обработаны в среде MathCad, где получены аппроксимационные формулы критериев качества в зависимости от предельной тяги Т и импульса тяги dT при управлении. Эти результаты представлены на рис. 3 и 4. Рис. 3 показывает всю процедуру получения аппроксимации зависимости критериев Q 1 и Q 2 от тяги Т , начиная от задания исходных данных в виде векторов в верхней части рисунка до графиков зависимостей в нижней части. Рис. 4 предоставляет ту же информацию зависимости Q 1 и Q 2 от величины импульса тяги dT . Под наименованием coeffs Т со знаком транспонирования ( ) Т приведены векторы коэффициентов разложения критериев в степенные ряды. Анализ всех полученных зависимостей позволяет отметить в качестве оптимальных максимальную тягу Т = 20 кН и импульс тяги dT = 2 кН, что полностью соответствует интуитивной оценке качества управления по виду траектории.
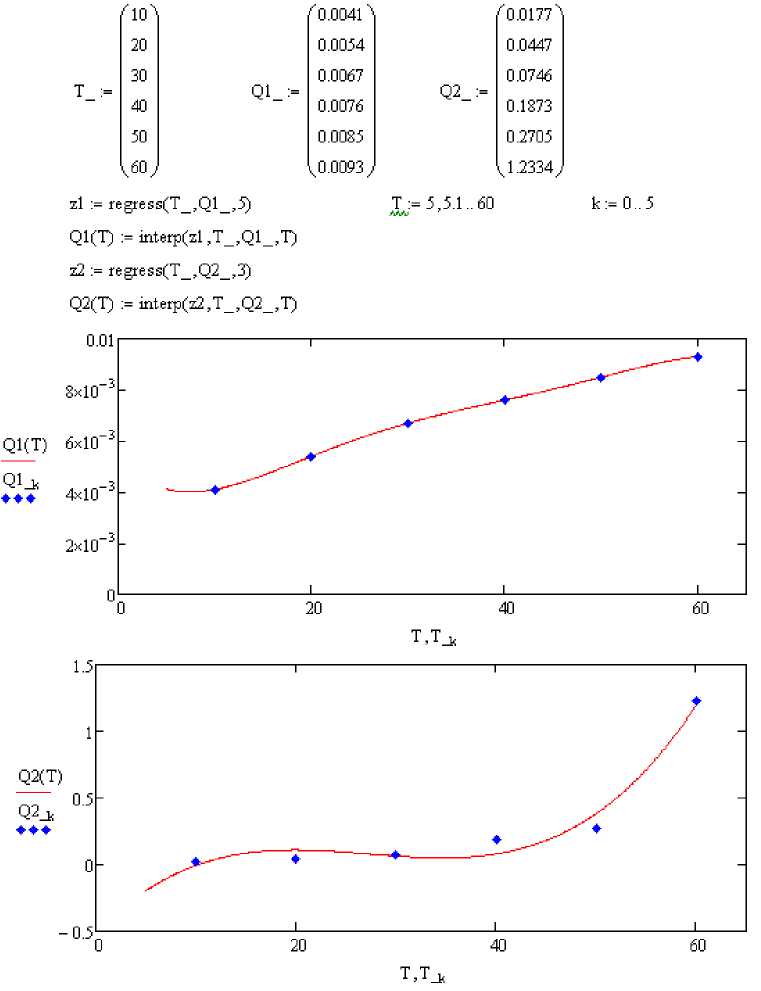
Рис. 3. Аппроксимация зависимости критериев качества управления Q 1 , Q 2 от величины предельной тяги Т
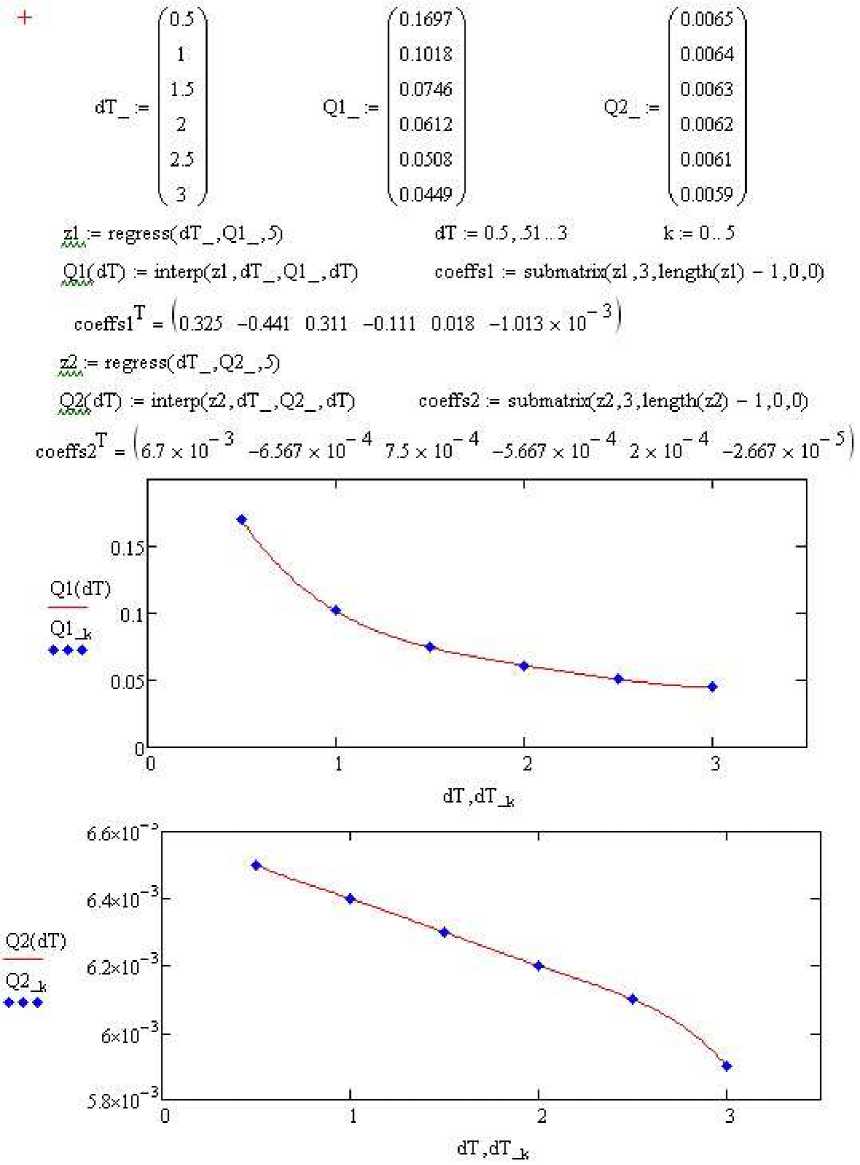
Рис. 4. Аппроксимация зависимости критериев качества управления Q 1 , Q 2 от величины импульса тяги d Т
Заключение
В статье представлены два критерия качества управления движением танкера с использованием известного способа управления по отклонениям от линии прицеливания в процессе выполнения швартовной операции. Выполнена оценка качества управления по отклонениям от прицельной линии методом модельных испытаний маневров танкера при движении лагом в процессе выполнения швартовной операции. При этом варьировались предельные тяги подруливающих устройств и величина импульса их тяги. Введенные критерии показали их согласие с интуитивной оценкой качества управления по виду траекторий.
Список литературы Оценка качества управления по отклонениям от прицельной линии
- Способ управления судном при выполнении им швартовной операции к борту судна-партнера: пат. 2475410 Рос. Федерация. № 2011137696/11; заявл. 13.09.11; опубл. 20.02.13, Бюл. № 5. 7 с.
- Юдин Ю. И., Петров С. О., Холичев С. Н. Способ управления судном при выполнении им швартовной операции к борту судна, стоящего на якоре//Вестник МГТУ. 2013. Т. 16, № 1. С. 187-192.
- Холичев С. Н., Агарков С. А. Моделирование процесса швартовки к борту судна-партнера на финальном этапе сближения судов "борт к борту" с использованием инновационного способа управления судном//Вестник МГТУ. 2015. Т. 18, № 1. С. 60-65.
- Холичев С. Н., Юдин Ю. И., Петров С. О. Моделирование процесса швартовки к борту судна-партнера с использованием инновационного способа управления судном//Вестник МГТУ. 2015. Т. 18, № 1. С. 53-59.
- Пашенцев С. В., Юдин Ю. И. Моделирование процесса управляемого движения судна вдоль линии положения//Вестник МГТУ. 2013. Т. 16, № 1. С. 141-147.
- Юдин Ю. И., Пашенцев С. В. Моделирование управляемого движения судна по произвольной траектории//Эксплуатация водного транспорта. 2012. № 3 (69). С. 32-36.
- Петров С. О., Юдин Ю. И., Холичев С. Н. Моделирование движения танкера на нефтяном терминале в открытом море при управлении на перекрестие//Вестник МГТУ. 2015. Т. 18, № 1. С. 25-32.
- Петров С. О., Агарков С. А. Стратегия управления движением танкера на перекрестие//Вестник МГТУ. 2015. Т. 18, № 1. С. 20-24.
- Карасев А. В., Лукомский Ю. Л., Мусин Е. А. О критерии оптимального управления курсом судна//Судостроение. 1967. № 4. С. 36-40.
- Антомонов Ю. Г. Расчет систем, оптимальных по быстродействию. Л.: Судостроение, 1964. 71 c.
- Агарков С. А., Юдин Ю. И. Оценка качества управления по отклонениям от прицельной линии//Материалы XI междунар. науч.-практ. конф. "Передовые научные разработки -2015". Том 5. Физика. Современные научные разработки. Прага. Издательский дом "Образование и наука", 2015. С. 10-14
