Оценка механизмов свободного хода как объектов сервиса

Автор: Шарков Олег Васильевич, Корягин Сергей Иванович, Патрикеев Михаил Витальевич
Журнал: Технико-технологические проблемы сервиса @ttps
Рубрика: Диагностика и ремонт
Статья в выпуске: 1 (51), 2020 года.
Бесплатный доступ
Представлены результаты сравнения технического уровня механизмов свободного хода с цилиндрическими и эксцентриковыми заклинивающимися элементами зарубежных производителей. В качестве критериев сравнения предложены коэффициенты относительного диаметра и массы. Показано, что для различных типов механизмов свободного хода коэффициент относительного диаметра имеет качественное и количественное совпадение.
Механизм свободного хода, технический уровень, сервисное обслуживание, технологическое оборудование
Короткий адрес: https://sciup.org/148319955
IDR: 148319955 | УДК: 621.837
Estimation of freewheel mechanisms as service objects
The results of comparing the engineering level of freewheel mechanisms with cylindrical and eccentric wedging elements of foreign manufacturers are presented. The coefficients of relative diameter and mass are proposed as comparison criteria. It is shown that for different types of freewheel mechanisms the coefficient of relative diameter has a qualitative and quantitative coincidence.
Текст научной статьи Оценка механизмов свободного хода как объектов сервиса
Одними из наиболее ответственных элементов приводов, во многом определяющих надежность различных машин и технологического оборудования, являются механизмы свободного хода (МСХ). В качестве примеров их использования можно назвать пищевое и полиграфическое оборудование, автотракторные стартеры, автоматические коробки передач, металлорежущие станки и др. [1–7].
Несмотря на большое разнообразие конструкций МСХ в технических системах в основном нашли применение механизмы с цилиндрическими и эксцентриковыми роликами [2].
В настоящее время на внутреннем Российском рынке преимущественно представлены МСХ зарубежных фирм – «GMN», «Ring-spann», «Stieber» (Германия), «Renold» (Великобритания), «Tsubaki» (Япония). Они предлагают МСХ различного конструктивного испол- нения с широким диапазоном нагрузочных и габаритных параметров. В табл. 1 приведены основные характеристики МСХ общемашиностроительного применения (величина передаваемого вращающего момента от 50 до 5000 Н·м) зарубежных производителей.
МСХ следует считать невосстанавливае-мыми изделиями. Известные попытки их ремонта путем наплавления изношенных рабочих поверхностей внутренней звездочки, замены заклинивающихся роликов и т.п. не приводили к полному восстановлению работоспособности.
Таким образом, при сервисном обслуживании или ремонте технологического оборудования, в случае потери МСХ работоспособности необходимо провести их замену. При этом возникает необходимость сравнительной оценки технического уровня МСХ как объектов сервиса, и выбрать наиболее приемлемую конструкцию механизма.
Таблица 1 – Характеристики механизмов свободного хода
|
Тип МСХ |
Вращающий момент T , Н·м |
Рабочий диаметр D , мм |
Масса m , кг |
|
Роликовые МСХ |
|||
|
Тип AE фирмы «Stieber» (Германия) |
55…3500 |
37…125 |
0,3…6,8 |
|
Тип VGF фирмы «GMN» (Германия) |
90…2350 |
50…125 |
0,6…8,9 |
|
Тип REUSNU фирмы «Renold» (Великобритания) |
49…3275 |
36…140 |
0,2…5,8 |
|
МСХ с эксцентриковыми роликами |
|||
|
Тип RSCI фирмы «Stieber» (Германия) |
212…4500 |
66…160 |
0,30…2,60 |
|
Тип BREU фирмы «Tsubaki» (Япония) |
607…4739 |
75…140 |
2,70…17,2 |
|
Тип SF фирмы «Ringspann» (Германия) |
200…5000 |
55…145 |
0,90…13,3 |
В настоящее время технический уровень различных машиностроительных изделий принято оценивать количественным параметром, показывающим отношение основных конструктивных характеристик или затраченных материальных средств к полученному результату.
Для МСХ основным полученным результатом является величина передаваемого механизмом вращающего момента – T .
Основной конструктивной характеристи- кой МСХ принято считать его рабочий диаметр – D (рис. 1).
Рабочий диаметр МСХ можно использовать не только для сравнения их радиальных габаритов, но и при расчетах прочности, жесткости, нагрузочной способности и др. Этот диаметр обычно используют в качестве модуля при определении размеров различных конструктивных элементов МСХ. Например, для МСХ с тремя и пятью роликами по ОСТ 27-60721-84 «Муфты обгонные роликовые. Основные параметры и размеры» диаметр и длина заклинивающегося ролика изменяется в диапазоне d = (0,12 ... 0,13 )D и l = (0,20 ... 0,25 )D , а длина и толщины внешней обоймы – l = (0,35 ... 0,45 )D и h = ( 0,125 ...0,20)D .
При этом параметр D косвенно учитывает и массо-габаритные характеристики механизмов.
В этом случае, для оценки технического уровня можно использовать коэффициент относительного диаметра, определяемый по формуле
KD = D/T . (1)
Коэффициент удобен еще и тем, что позволяет увязать возможность установки нового механизма с существующими габаритными
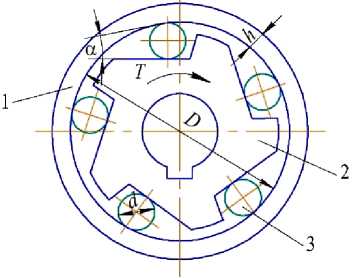
Рисунок 1 – Конструкция роликового МСХ:
-
1 – внешняя обойма; 2 – звездочка;
-
3 – заклинивающийся ролик
Если строгие ограничения на габаритные размеры отсутствуют, тогда параметром, отражающим затраченные средства, является масса m , в которой интегрировано, пусть и косвенно, отражаются производственные затраты. Такой подход широко используется применительно к редукторам [8] и отражен в ГОСТ 31592–2012 «Редукторы общемашиностроительного применения. Общие технические условия».
Тогда технический уровень МСХ можно оценить коэффициентом относительной массы
Km = m/ T . (2)
Некоторые авторы для сравнения технического уровня МСХ предлагают использовать показатель обратный K m , который можно назвать относительным моментом K =1/ Km .
Например, усредненные значения коэффициента относительного момента МСХ для стартеров составляют: KT =26,6 Н·м/кг (роликовые); K =39,1 Н·м/кг (с эксцентриковыми роликами); K =24,3 Н·м/кг (фрикционные);
размерами.
K =21,7 Н·м/кг (пружинные); K =59,9 Н·м/кг (храповые) [9].
Формулы (1) и (2) удобно использовать на практике, т.к. входящие в них параметры приводятся в справочниках, каталогах, статьях и др. При этом следует учитывать, что долговечность сравниваемых МСХ должна быть примерно одинакова.
На рис. 2 и 3 представлены графики, характеризующие зависимость относительных габаритов от передаваемой нагрузки для МСХ иностранных производителей (табл. 1).
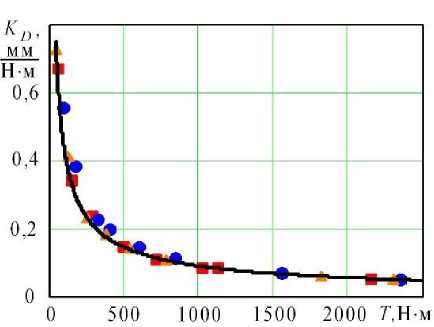
Рисунок 2 – Зависимость коэффициента относительного диаметра от вращающего момента для роликовых МСХ фирм: ■ – «Stieber»; • – «GMN»; ▲ – «Renold»
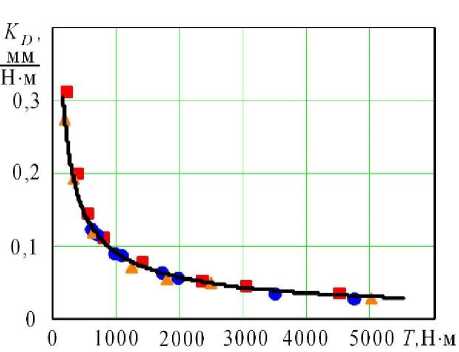
Рисунок 3 – Зависимость коэффициента относительного диаметра от вращающего момента для МСХ с эксцентриковыми роликами фирм: ■ –
«Stieber»; • – «Tsubaki»; ▲ – «Ringspann»
Анализ полученных результатов показывает, что практически для всех типоразмеров МСХ с цилиндрическими и эксцентриковыми заклинивающимися телами коэффициент K характеризуется качественным и количественным совпадением. На основании использования регрессионного анализа установлено, что аналитически коэффициент относительного диаметра можно описать степенной зависимостью типа [10]
K D = 10 T - 0 , 68 . (3)
Тогда, решая совместно выражения (1) и (3), можно получить зависимость для ориентировочной оценки необходимых габаритных размеров МСХ
D = 10 T 0,32 . (4)
Такое совпадение коэффициентов K для МСХ с различным типом заклинивающихся тел можно объяснить единым критерием их работоспособности – величиной допускаемых контактных напряжений [ g н ] в местах соприкосновения заклинивающихся тел с внутренней или внешней обоймами [1–3, 11].
Контактные напряжения возникают под действием нормальных сил, которые можно рассчитать по формулам источников [3] и [12] соответственно:
4 т
F N = -------.
zDtg а
F
N
Г 2
v I D [ Ст H ]
— 0,349 Е ^ v d J
где а - угол заклинивания;
z – число заклинивающихся роликов;
V z = l/d - коэффициент длины закли нивающего ролика, v z =1—4;
V,, = D / d - коэффициент диаметра заклинивающего ролика,
V d =5—9; е - приведенный модуль упругости материала механизма;
[ g н ] - допускаемое контактное напряжение.
Совместное решение выражений (4) и (5) позволяет получить ориентировочную зависимость величины рабочего диаметра внешней обоймы от передаваемой нагрузки в виде
1,39 ТЕ v d
D = з --------- d—
\ zV i [ ст н ]2 tg а или D = TCC , (6)
где C – эмпирический коэффициент, зависящий от конкретного типа механизма.
Как видно из формулы (6) для выполнения условия постоянства контактных напряжений [ g н ] при увеличении нагрузки т рабочий диаметр D должен изменяться по степенной зависимости близкой к показанной на рис. 2 и 3.
На рис. 4 и 5 представлены графики, характеризующие зависимость коэффициента относительной массы от передаваемой нагрузки для МСХ (табл. 1). Анализ полученных результатов показывает, что наблюдается значительный разброс величины коэффициента K как в зависимости от конструктивных схем МСХ различных производителей, так и от типа тел заклинивания.
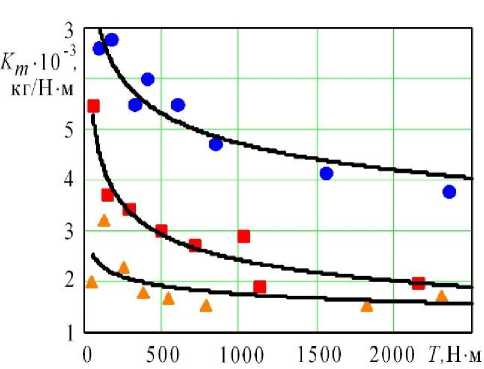
Рисунок 4 – Зависимость коэффициента относительной массы от вращающего момента для роликовых МСХ фирм : ■ – «Stieber»; • – «GMN»; ▲ – «Renold»
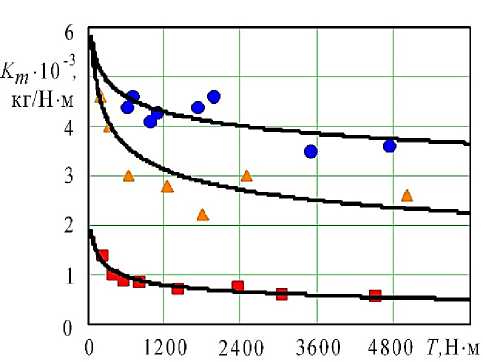
Рисунок 5 – Зависимость коэффициента относительной массы от вращающего момента для МСХ с эксцентриковыми роликами фирм :
■ – «Stieber»; • – «Tsubaki»; ▲ – «Ringspann»
Таким образом, коэффициент относительной массы целесообразно использовать преимущественно при технико-экономических расчетах.
Полученные зависимости позволяют предварительно оценить технический уровень различных типов МСХ иностранных производителей и дать рекомендации по подбору наиболее рационального типа механизма для конкретного технологического оборудования.
Список литературы Оценка механизмов свободного хода как объектов сервиса
- Orthwein W.C. Clutches and brakes: design and selection. - New York: Marcel Dekker, 2004. - 330 p.
- Ряховский О.А., Иванов С.С. Справочник по муфтам - Ленинград: Политехника, 1991. - 384 с.
- Архангельский Г.В., Архангельский А.Г. Роликовые механизмы свободного хода. - Одесса: Наука и техника, 2009. - 92 с.
- Sharkov O.V., Koryagin S.I. Operational reliability of free-wheel mechanisms in a pulsed variable-speed drive // Russian Engineering Research. - 2017. - Т.37. - №1. - С. 9-12.
- Иванов А.С., Ермолаев М.М., Куралина Н.Н., Седова Л.А. Конструирование муфт свободного хода редукторов // Вестник машиностроения. - 2014. -№10. - С. 3-7.
- Благонравов А.А., Ревняков Е.Н. Механизмы свободного хода импульсных бесступенчатых передач // Автомобильная промышленность. - 2008. - № 6. -С. 16-18.
- Кропп А.Е. Новые обгонные муфты и области их применения // Вестник машиностроения. - 2005. -№ 6. - С. 8.-12.
- Абдуллаев А.И., Наджафов А.М. Качественная оценка технического уровня. Пакетного редуктора // Вестник машиностроения. - 2008. - №12. - С. 6-9.
- Мартиросов А.Г., Крупский В.И. Выбор перспективного привода для автотракторных стартеров повышенной мощности // VI Всесоюзная научно-техническая конференция по управляемым и автоматическим механическим приводам и передачам гибкой связью: сборник тезисов докладов. - Одесса, 1980. - С. 220-221.
- Львовский Е.Н. Статистические методы построения эмпирических формул. - Москва: Высшая школа, 1988. - 224 с.
- Хабрат Н.И. Силовые взаимодействия деталей в роликовой обгонной муфте // Вестник машиностроения. - 2011. - №7. - С. 33-37.
- Золотов И.А., Шарков О.В. Анализ напряженно-деформированного состояния внешней обоймы роликовых механизмов свободного хода // Известия вузов. Машиностроение. - 2013. - № 10. - С. 36-41. doi:10.18698/0536-1044-2013-10-36-41.
