Оценка погрешностей измерения навигационно-посадочных параметров с использованием псевдоспутников

Автор: Казыкин А.А., Мусонов В.М.
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Авиационная и ракетно-космическая техника
Статья в выпуске: 4 т.25, 2024 года.
Бесплатный доступ
В настоящий момент существенное количество региональных аэродромов не имеют достаточного места для наземного навигационного оборудования. Это может привести к нежелательным последствиям при посадке воздушного судна (ВС) при слабом визуальном контакте экипажа со взлётно-посадочной полосой (ВПП). Система псевдоспутников способна повысить безопасность полетов на этапе посадки в сложных метеорологических условиях на региональных аэродромах без использования индикатора на лобовом стекле (ILS) после оценки погрешностей навигационно-посадочных параметров. Система псевдоспутников может быть использована для повышения безопасности полётов на этапе посадки в сложных метеорологических условиях на региональных аэродромах. Эта система состоит из контрольно-корректирующей станции и псевдоспутников, которые работают в определённых частотных диапазонах. При использовании этой системы на воздушном судне устанавливается плановый навигационный прибор ПНП-72, который выдаёт основную навигационную информацию с заданной точностью. Это позволяет пилотам использовать более точную информацию и выполнять безопасный заход на посадку и посадку ВС на ВПП даже при слабом визуальном контакте с ней. Таким образом, использование системы псевдоспутников может помочь решить проблему недостаточного количества наземных навигационных средств на региональных аэродромах. Это позволит обеспечить более точное определение местоположения ВС и улучшить качество навигационной информации, предоставляемой экипажу. Применение системы псевдоспутников может стать альтернативой использованию дорогостоящих и сложных систем ILS, особенно на небольших аэродромах, где установка таких систем может быть нецелесообразной или экономически невыгодной. Однако для успешного внедрения и эксплуатации системы псевдоспутников необходимо провести дополнительные исследования и испытания, чтобы определить оптимальные параметры работы системы, а также разработать соответствующие нормативные документы и процедуры для обеспечения безопасности полётов.
Псевдоспутники, безопасность полетов, gps-спутники, удаленные аэродромы, спутниковые навигационные системы глонасс
Короткий адрес: https://sciup.org/148330573
IDR: 148330573 | УДК: 528.2:629.73 | DOI: 10.31772/2712-8970-2024-25-4-454-463
Estimation of measurement errors of navigation and landing parameters using pseudosatellites
At the moment, a significant number of regional airfields do not have sufficient space for ground navigation equipment, this can lead to undesirable consequences when landing an aircraft with weak visual contact of the crew with the runway (runway). The pseudo-satellite system is able to improve flight safety at the landing stage in difficult meteorological conditions at regional airfields without using ILS (indicator on the windshield), after evaluating errors in navigation and landing parameters. The pseudo-satellite system can be used to improve flight safety at the landing stage in difficult meteorological conditions at regional airfields. This system consists of a control and correction station and pseudo satellites that operate in certain frequency ranges. When using this system, the PNP-72 scheduled navigation device is installed on the aircraft, which provides basic navigation information with a given accuracy. This allows pilots to use more accurate information and perform a safe approach and landing of aircraft on the runway, even with weak visual contact with it. Thus, the use of a pseudo-satellite system at regional airfields can significantly improve flight safety at the landing stage, especially in difficult meteorological conditions when the use of ILS is impossible. The use of a pseudo-satellite system can also help solve the problem of an insufficient number of ground navigation aids at regional airfields. This will allow for a more accurate determination of the aircraft's location and improve the quality of navigation information provided to the crew. The use of a pseudo-satellite system can become an alternative to the use of expensive and complex ILS systems, especially at small airfields where the installation of such systems may be impractical or economically unprofitable. However, for the successful implementation and operation of the pseudo-satellite system, additional research and testing is necessary to determine the optimal parameters of the system, as well as to develop appropriate regulatory documents and procedures to ensure flight safety.
Текст научной статьи Оценка погрешностей измерения навигационно-посадочных параметров с использованием псевдоспутников
Наземные псевдоспутники для навигации самолетов обычно называются наземными станциями дифференциальной коррекции (DGNSS) или базовыми станциями ГНСС (глобальной навигационной спутниковой системы). Они играют важную роль в повышении точности и надежности навигации в воздушном пространстве:
-
- работа наземных станций DGNSS. Наземные станции DGNSS располагаются на земной поверхности и оснащены высокоточными приемниками сигналов ГНСС (например, GPS, ГЛОНАСС). Эти станции непрерывно принимают сигналы от спутников и затем корректируют их для устранения ошибок, связанных с атмосферными и другими факторами, которые могут влиять на точность навигации;
-
- передача коррекций. Наземные станции передают коррекции в реальном времени через радиосвязь или сети данных в навигационные приемники, установленные на борту самолетов. Это позволяет самолетам уточнять свои координаты и улучшать точность навигации до нескольких сантиметров [1];
-
- повышение точности: Использование наземных станций DGNSS позволяет значительно повысить точность и надежность навигации в воздушном пространстве. Это особенно важно
для взлетов, посадок, подходов к аэропортам и других фаз полета, где точность играет решающую роль в безопасности [2];
-
- устранение эффекта ионосферы. Наземные станции DGNSS могут помочь устранить ошибки, вызванные ионосферой Земли, что может существенно улучшить точность навигации.
Решение задачи оптимизации и выбор методов её решения зависит от формирования целевой функции, а также используемого критерия оптимизации [3].
Оптимизация размещения псевдоспутников
В основе выбора целевой функции лежит зависимость величины погрешностей измерения координат ВС от значений геометрического фактора (ГФ) [4]. Таким образом, точность определения навигационно-временных параметров с помощью спутниковых навигационных систем (ССН) можно оценить через геометрические факторы (ГФ). Горизонтальный геометрический фактор HDOP позволяет определить точность определения горизонтальных координат (рис. 1), а чтобы оценить точность определения вертикальной координаты, т. е. высоты, используется вертикальный геометрический фактор VDOP (рис. 2).
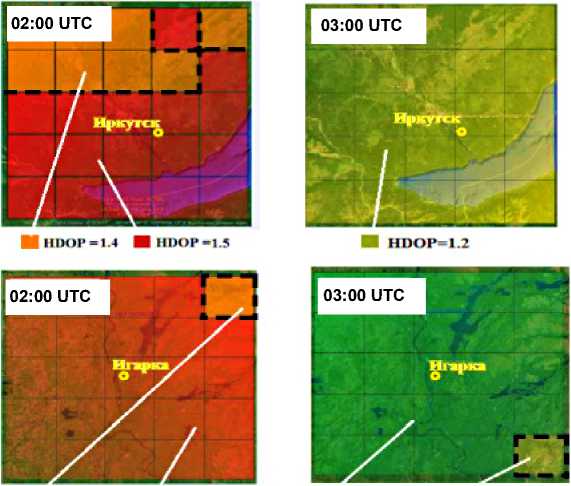
ШЮР=1.2 Мнпор 1.3 ЦНПОР 1.0 ■ ШЮР=1.1
Рис. 1. Поле точности GPS по коэффициенту снижения точности в горизонтальной плоскости (HDOP)
Fig. 1. GPS accuracy field by the coefficient of accuracy reduction in the horizontal plane (HDOP)
Важно подчеркнуть, что применение псевдоспутников (ПС) оказывает значительное влияние на снижение вертикального геометрического фактора при решении навигационной задачи [5]. Так как на этапе посадки особенно важны строгие требования к точности определения высоты, ПС следует разместить таким образом, чтобы точность определения высоты была наилучшей на всём протяжении посадочной траектории [6]. Таким образом, в качестве целевой функции при решении задачи нахождения оптимального расположения ПС в районе аэродрома будем использовать среднее вдоль всей посадочной траектории значение вертикального ГФ VDOP:
VDOPcp ( B ПС L ПС H ПС ) ^ min
где ВпсLпсНпс – геодезические координаты ПС. Для большинства аэродромов посадку на ВПП можно проводить с двух противоположных посадочных курсов. Принимая во внимание этот фактор, ПС нужно расположить так, чтобы средний VDOP стал минимальным для обеих траек- торий посадки, начиная с точек захода на глиссаду и заканчивая точками касания ВПП (рис. 3). Учитывая этот факт, выражение (1) примет вид:
n
E VDOPCP (BПСLПСHПС) ^ min n 1 , (2)
где n – количество точек посадочной траектории, в которых вычисляется ГФ. Принимая во внимание небольшие изменения ГФ в близлежащих точках, для вычисления среднего ГФ вдоль траектории посадки достаточно использовать 25–30 равномерно распределённых точек. Следовательно, оптимальным размещением ПС предлагается считать то, которое обеспечивает минимальное среднее значение VDOPср для всей траектории посадки, определённое выражением (2). Поскольку вследствие орбитального движения НС наблюдаются временные вариации геометрического фактора в районе аэродрома, то при решении задачи оптимизации используемое в качестве критерия среднее значение VDOP вдоль всей посадочной траектории должно учитывать и эту особенность. Выражение (2) примет вид:
1 n
-
- E VDOPcf i ( B пс L пс H пс ) ^ min
n 1 , (3)
где i – момент времени, на который рассчитано среднее вдоль посадочной траектории значение VDOP.
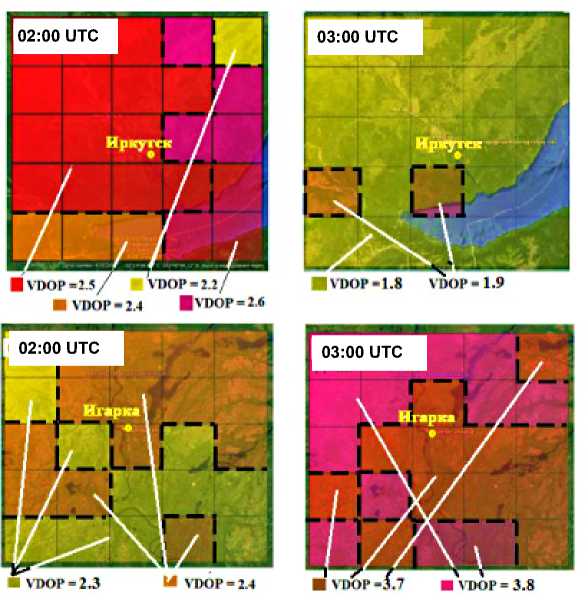
Рис. 2. Поле точности GPS по коэффициенту снижения точности в вертикальной плоскости (VDOP)
Fig. 2. GPS accuracy field by vertical plane accuracy reduction factor (VDOP)
Продолжительность полного цикла орбитального движения ГЛОНАСС составляет примерно восемь суток (691200 с). Так как временные изменения VDOP довольно медленные, для решения этой задачи достаточно выбирать временной интервал для расчёта VDOP около 10 мин (600 с). Чтобы учесть весь период повторяемости орбитальной структуры ГЛОНАСС, необходимо 691200 разделить на 600, что равно 1152 значениям [7].
Изучаются способы создания системы наземного оборудования для системы посадки и бортового оборудования ВС, а также методы высокоточной синхронизации нескольких псевдоспутников. Эта система представляет собой локальную систему посадки воздушных судов (ЛСПВС) [8]. В состав наземного оборудования ЛСПВС входят:
-
– опорная станция дифференциальной коррекции навигационных сигналов (КНС);
-
– передатчики ПС, сигнал которых модулирован дальномерным кодом;
-
– контрольный приемник, обеспечивающий проверку сигнала, излучаемого ПС, по нескольким критериям;
-
– мощность сигнала, сдвиг шкалы времени дальномерного кода, структура и содержание передаваемой цифровой информации.
Основные особенности представленного варианта построения наземного сегмента ЛСПВС:
-
– синхронизация шкал времени (ШВ) ПС непосредственно по выходным дальномерным радиосигналам ПС;
-
– совмещение функций контроля и синхронизации ПС;
-
– совмещение приемного устройства, обеспечивающего формирование дифференциальных поправок КНС с приемным устройством синхронизации ШВ ПС;
-
– управление задержкой дальномерного сигнала и излучаемой мощностью каждого ПС по локальной сети;
-
– использование в базовой станции высокостабильного опорного генератора (ОГ) для поддержания синхронизации с КНС при временном отсутствии приема сигналов НКА;
-
– максимальное уменьшение стоимости ПС для «безболезненного» увеличения их числа в ЛСПВС.
Структурная схема ЛСПВС представлена на рис. 3.
НКА ГЛОНАСС/GPS
ВС
Антенный модуль для приемов сигналов НКА
Антенный модуль I для приема сигналов I
ПС в диапазоне F ПС St
S nc (Fnc)
Модуль преобразования
л
частоты сигналов ПС из диапазона F ПС в диапазоне I
L2 GPS с функцией АРУ I
Shk*
Sue (L2)
Модуль суммирования сигналов в L-диапазоне
Высокостабильный ОГ
\ '
\ \ \ \ \
/
/ /
/И " /1 \ / / \ ’ J \
J
Сигналы ПС на частоте F ПС
\
\
\
\
\
•* \
ум
ПС.1
ПС-N
Измерения параметров сигналов НКА и ПС Расчет дифференцированных поправок Определение рассогласования шкал времени ПС Контроль помеховой обстановки
Формирование пакетов ККИ
Формирование команд управление ШВ ПС Формирование команд управления мощностью ПС
Пакеты ККИ, команды управления ШВ ПС, команды управления мощностью ПС
Базовая станция ЛС ПВС
Рис. 3. Структурная схема ЛСПВС
Fig. 3. The block diagram of the LSPVS
Анализ показывает, что для обеспечения разделения излучений сигналов нескольких ПС, электромагнитной совместимости сигналов ПС с наземным оборудованием системы ЛСПВС, навигационным оборудованием ГЛОНАСС/GPS и бортовым оборудованием ВС, а также для достижения высокой точности измерения радионавигационных параметров (задержки доплеровского сдвига частоты, фазы и разности фаз сигналов несущей частоты), необходимо использовать для ПС сигналы, отличные от существующих сигналов КНС [9]. В частности, рекомендуется передавать сигналы ПС на несущей частоте, значительно отличающейся от частот сигналов НКА ГЛОНАСС/GPS, что обеспечит частотное разделение этих сигналов [10].
При выборе частотного диапазона сигнала ПС важно также учитывать расположение антенны для приёма сигналов ПС на борту воздушного судна. Существуют два варианта размещения антенны: в верхней и нижней части фюзеляжа [11].
Повышение точности навигации
Общий результат использования наземных псевдоспутников для навигации самолетов – это значительное улучшение точности и безопасности полетов, что особенно важно в гражданской и военной авиации. Эта технология позволяет пилотам и автоматическим системам управления самолетами точно определять свое местоположение и следовать заданному маршруту с высокой степенью уверенности [12].
Наземные ПС повышают точность навигации путем предоставления дополнительных источников данных и коррекций для приемников GPS (или других спутниковых навигационных систем), что помогает улучшить точность позиционирования [13].
Наземные ПС размещаются в известных местах с известными координатами. Они могут наблюдать за сигналами от спутников и вычислять ошибки в этих сигналах, вызванные атмосферным воздействием или другими факторами [14]. Затем они передают эти коррекции на приемники GPS, которые используют их для улучшения точности позиционирования. Система дифференциального позиционирование (DGPS) использует станцию на земле, известную как базовая станция, которая измеряет ошибки в GPS-сигналах и отправляет коррекции на ПС (реальные GPS-спутники) и приемники на земле. Это позволяет улучшить точность позиционирования на конкретной территории.
Real-Time Kinematic (RTK): RTK – это метод, который также использует базовую станцию, но в этом случае коррекции передаются в режиме реального времени и приемник на земле может достичь очень высокой точности (до сантиметров) в позиционировании.
Системы коррекции в реальном времени . Существуют различные системы коррекции в реальном времени, такие как Wide Area Augmentation System (WAAS) в США или European Geostationary Navigation Overlay Service (EGNOS) в Европе. Они предоставляют коррекции сигналов GPS через спутники или наземные станции.
Усиление сигнала GPS . Для улучшения сигнала на конкретной территории можно использовать усилители сигнала GPS или распределенные антенны.
Использование дополнительных сенсоров . Для повышения точности позиционирования возможно использовать дополнительные сенсоры, такие как инерционные измерители (IMU) или магнитометры, чтобы компенсировать ошибки GPS [15].
Локальные базы данных и карты . Создание локальных баз данных о территории, включая информацию о преградах, зданиях и т. д., помогает в коррекции позиционирования.
Распределение коррекций в реальном времени . Наземные ПС передают коррекции в реальном времени на приемники GPS через сеть или радиоканал. Это позволяет обновлять информацию о коррекциях непрерывно и мгновенно учитывать изменения в атмосферных условиях или других факторах, влияющих на точность.
Чтобы улучшить точность навигации, наземные ПС могут интегрировать данные из различных источников, таких как геодезические измерения, информация о высоте, метеорологические данные и др.
Совокупность этих факторов позволяет наземным ПС увеличивать точность навигации и обеспечивать более надежное и точное позиционирование для приемников GPS и других навигационных систем.
Оптимальное количество ПС зависит от нескольких факторов, включая цели навигации, точность, надежность и степень уверенности в позиционировании. Важно понимать, что чем больше спутников используется в процессе позиционирования, тем выше вероятность достижения более точных результатов. Однако существует оптимальное количество спутников, которое можно использовать для обеспечения достаточной точности и надежности, а именно:
-
- минимальное количество спутников для 2D-позиционирования: для определения двумерной (широты и долготы) позиции требуется как минимум 3 видимых спутника. Это обеспечивает позиционирование на поверхности Земли;
-
- минимальное количество спутников для 3D-позиционирования: для трехмерного (широта, долгота и высота) позиционирования требуется как минимум 4 видимых спутника. Это три спутника для определения горизонтальной позиции и четвертый для высоты.
Для увеличения точности и надежности позиционирования рекомендуется использовать больше видимых спутников. Обычно, чем больше спутников, тем лучше [15].
Итак, оптимальное количество ПС зависит от конкретных требований задачи. В большинстве ситуаций более 4 видимых спутников обеспечивают хорошую точность, но авиации могут потребоваться дополнительные спутники для повышения надежности и точности позиционирования.
Проанализируем воздействие количества оптимально размещённых станций сети на параметры интегрированной навигационной системы в исследуемой области воздушного пространства вокруг аэродрома Байкит. При этом задача определения оптимальных позиций станций (рассматривалась возможность подключения до пяти станций) решалась поэтапно, т. е. после определения оптимальной позиции первой станции определялась оптимальная позиция второй станции, затем третьей и так далее. Полученные результаты показывают, что увеличение числа станций ведёт к снижению среднего значения VDOP и диапазона его изменений.
В таблице приведены рассчитанные для момента времени 11:30 UTC 07.05.2021 г. значения среднего VDOP вдоль посадочной траектории как при отсутствии ПС (графа 2), так и при их различном количестве. Выбранный момент времени характеризуется одним из худших значений VDOP = 2 в районе аэродрома Байкит на полном 8-суточном интервале работы ГЛОНАСС.
VDOP при разном количестве ПС (Байкит)
|
ГЛОНАСС |
ГЛОН+1ПС |
ГЛОН+2ПС |
ГЛОН+3ПС |
ГЛОН+4ПС |
ГЛОН+5ПС |
|
|
Средний VDOP |
2 |
1,311 |
0,973 |
0,870 |
0,791 |
0,742 |
|
Выигрыш без ПС, % |
– |
35 |
52 |
57 |
61 |
63 |
Согласно таблице, применение оптимизации размещения позволяет сократить VDOP следующим образом: при использовании одного ПС – на 35 %, двух ПС – на 52 %, трёх ПС – на 57 %, четырёх ПС – на 63 %. Дальнейшее увеличение количества ПС в сети не приводит к значительному улучшению вертикального геометрического фактора и точности определения высоты полёта ВС. Таким образом, хотя использование более четырёх ПС для повышения точности определения высоты полёта ВС нецелесообразно, это повышает надёжность системы.
Заключение
Использование ПС в навигационно-посадочных системах позволяет повысить точность определения навигационных параметров и улучшить надёжность навигационного обеспечения. Применение таких систем особенно актуально для аэродромов с ограниченными возможностями наземной инфраструктуры и в сложных метеорологических условиях.
Использование псевдоспутников в навигационно-посадочных системах также способствует снижению зависимости от глобальных навигационных спутниковых систем, таких как GPS и ГЛОНАСС, и повышению автономности навигационного обеспечения.
Список литературы Оценка погрешностей измерения навигационно-посадочных параметров с использованием псевдоспутников
- Исследование точностных характеристик наземной радионавигационной системы на основе псевдоспутников [Электронный ресурс]. URL: https://infokosmo.ru/en/article/16748/issledovanie_tochnostnyh_harakteristik_nazemnoy_radionavigacionnoy_sistemy_na_osnove_psevdosputnikov_/?ysclid=lyfy3ln1ot593699423 (дата обращения: 15.04.2024).
- Исследование точностных характеристик аппаратуры спутниковых радионавигационных систем воздушных судов в высоких широтах [Электронный ресурс]. URL: https://cyberleninka.ru/article/n/issledovanie-tochnostnyh-harakteristik-apparatury-sputnikovyhradionavigatsionnyh-sistem-vozdushnyh-sudov-v-vysokih-shirotah (дата обращения: 15.04.2024).
- Цуканов И. Р., Азман А. В. Решаемые проблемы, преимущества и перспективы развития стратосферных беспилотных летательных аппаратов // Изв. ТулГУ. Технические науки. 2023. № 2. C. 6–7.
- Навигационно-посадочный комплекс беспилотного летательного аппарата с использованием псевдоспутников [Электронный ресурс]. URL: https://vestnik.rsreu.ru/ru/?option=com_ content&view=article&id=1123:1995-4565-2021-77-36-42&catid=194:vypusk-77&ysclid=lyfy94y51q197080686 lyfy7jnavy732330790 (дата обращения: 17.04.2024).
- Методика выбора конфигурации наземных базовых станций локальной навигационной системы для обеспечения наименьшей погрешности навигационных определений / А. Б. Гладышев, М. А. Голубятников, В. Н. Ратушняк, Д. Д. Кликно // Журнал СФУ. Техника и технологии. 2023. № 7. C. 4–5.
- Исследование параметров и расчет бюджета радиолинии в наземной системе ближней навигации на основе псевдоспутников [Электронный ресурс]. URL: https://cyberleninka.ru/article/n/issledovanie-parametrov-i-raschet-byudzheta-radiolinii-v-nazemnoy-sisteme-blizhneynavigatsii-na-osnove-psevdosputnikov (дата обращения: 18.04.2024).
- Агаев Ф. Г., Асадов Х. Г., Асланова Ф. Б. Много функциональные беспилотные летательные аппараты. Оптимизация и синтез с учетом воздействия шумов // Тр. МАИ. 2021. № 117. C. 5–6.
- Погосян М. А., Верейкин А. А. Системы автоматической посадки летательных аппаратов: аналитический обзор. Информационное обеспечение // Тр. МАИ. 2020. № 113. C. 5.
- Алгоритм оптимизации размещения псевдоспутников методом нелдера-мида / С. А. Якушенко, С. О. Бурлаков, В. Е. Егрушев и др. // Междунар. журнал гуманит. и естеств. наук. 2022. № 3-2. С. 6.
- Трусфус М. В., Абдуллин И. Н. Алгоритм обнаружения маркерных изображений для вертикальной посадки беспилотного летательного аппарата // Тр. МАИ. 2021. № 116. С. 7.
- Математические основы фрактально-скейлингового метода в статистической радиофизике и приложениях [Электронный ресурс]. URL: https://cyberleninka.ru/article/n/matematicheskie-osnovy-fraktalno-skeylingovogo-metoda-v-statisticheskoy-radiofizike-i-prilozheniyah (дата обращения: 21.04.2024).
- Федеральная служба государственной статистики [Электронный ресурс]. URL: http://www.gks.ru (дата обращения: 21.04.2024).
- Глобальный Аэронавигационной план [Электронный ресурс]. URL: https://studylib.ru/doc/2110923/global._nyj-ae-ronavigacionnoj-plan-na-2013–2028-gg (дата обращения: 22.04.2024).
- Инструкция по использованию глобальной навигационной спутниковой системы в гражданской авиации [Электронный ресурс]. URL: https://www.mintrans.ru/documents /detail.php?ELEMENT_ID=17850 (дата обращения: 23.04.2024).
- Statistical Summary of Commercial Jet Airplane Accidents Worldwide Operations [Электронный ресурс]. URL: http://www.boeing.com/resources/boeingdotcom/company/about_bca /pdf/statsum (дата обращения: 24.04.2024).
