Оценка потенциальной информативности сигнальных радиолокационных измерений космических объектов

Автор: Гладышев Анатолий Иванович
Рубрика: Информатика и вычислительная техника
Статья в выпуске: 3, 2016 года.
Бесплатный доступ
В статье представлены угло-частотное пространство радиолокационных измерений и динамические характеристики космических объектов.
Радиоинформационные системы, радиолокационные измерения, космические объекты
Короткий адрес: https://sciup.org/148160271
IDR: 148160271 | УДК: 537.812
Evaluation of potential information content of space objects radar signal measurements
The article presents the angle-frequency space radar measurements and dynamic characteristics of space objects.
Текст научной статьи Оценка потенциальной информативности сигнальных радиолокационных измерений космических объектов
многочастотных и широкополосных сигналов область измерений для каждого фиксированного направления будет иметь вид лучевого сегмента в к -пространстве, где k = ( k 1 ,k 2 ,k 3 ) - удвоенный волновой вектор, величина которого зависит от имеющейся полосы частот A F (см. рис. 1.2).
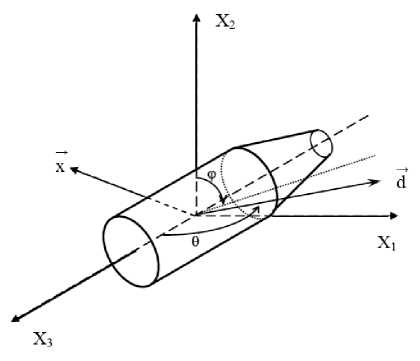
Рис. 1.1. Геометрические соотношения при наблюдении ИСЗ наземной РИС-И
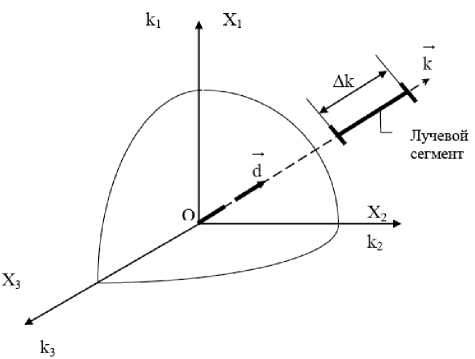
Рис.1.2. Области наблюдений в угло-частотном пространстве при фиксированном ракурсе наблюдения ∆ k = 4 π ∆ F/c
Для ИСЗ, стабилизированных по трем осям (например, KX-11(12), «Лакросс»), изменение направления будет определяться параметрами движения центра масс объекта относительно РИС-И. Если предположить, что угол φ в процессе движения остается практически неизменным (ось x3 направлена вдоль вектора скорости), то типичная область измерений для ИСЗ первой категории будет иметь вид, приведенный на рисунке 1.3. При широкополосных измерениях область представляет собой кольцевой сегмент шириной ∆ К = 4 π ∆ F/c или ∆ К = Кв – Кн , где Кв , Кн – соответственно минимальное и максимальное значения модуля волнового вектора.
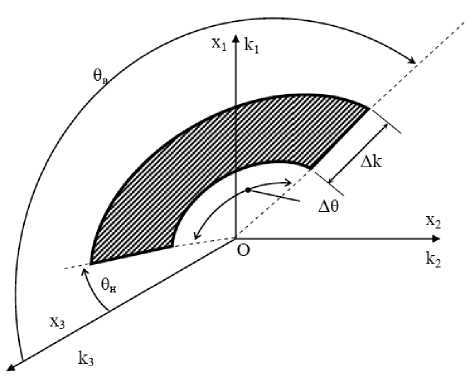
Рис. 1.3. Области наблюдений в угло-частотном пространстве при изменении ракурса наблюдения за счет относительного движения ИСЗ ( θ н, θ в – соответственно начальное и конечное значения угла, Δ θ = θ в – θ н)
Для монохроматического сигнала она вырождается в одно сечение угловой диаграммы отражения. На практике, за время одной проводки, равной нескольким минутам, изменение ракурса наблюдения ИСЗ лежит в пределах от θ н = 20о до θ в =160о. Изменение угла φ для стабилизированных объектов не столь велико и обычно не превышает 5–100. Наблюдение вращающихся объектов имеет две особенности. Во-первых, за время проводки ИСЗ может периодически наблюдаться в одном и том же угловом интервале. Во-вторых, существует принципиальная возможность получения выборки ракурсов в полном угловом диапазоне от 0 до 360°. Для медленно вращающихся ИСЗ, находящихся в режиме кувыркания, время получения полной ракурсной информации обычно составляет 1-2 мин. Если объект стабилизирован вращением, то это время существенно снижается до нескольких секунд, в частности для ИСЗ типа «Феррет».
В зависимости от вида некоординатных измерений, проводимых наземными РИС-И, на области D в к -пространстве будет определена функция, связанная с отражательными и геометрическими характеристиками цели. Для заданной поляризации сигнала при облучении и приеме отражательная способность объекта наиболее полно характеризуется комплексным коэффициентом рассеяния (ККР), квадрат модуля которого определяет ЭПР объекта:
IA (k_ )| = 5( k),
где A ( k ) , a ( k ) - ККР и ЭПР цели.
Некоординатные измерения, осуществляемые с помощью наземной РИС-И, можно разделить на два типа: широкополосные, понимаемые в обобщенном пространственно-временном смысле, и узкополосные. При узкополосных измерениях пространственно-частотная когерентность сигнала не используется. К ним относятся наиболее распространенные энергетические измерения отраженного сигнала или ЭПР. Обычно предполагается, что выполняется условие ∆ F / f 0 << 1 ( f 0 – несущая частота) и цель находится в одном элементе разрешения. Тогда можно полагать, что каждому измерению соответствует одна точка в к -пространстве.
При работе РИС-И в режиме широкополосного зондирования принимаемый сигнал является дальностным портретом (ДП), характеризующим представление отражательной способности цели.
Использование широкополосных сигналов (ШПС) позволяет обеспечить разрешение в продольном направлении, равное:
ВЕСТНИК 2016
ВЕСТНИК 2016
Δx=2π Δk=c2ΔF, где с – скорость света, что дает возможность получать одномерные радиолокационные изображения (РЛИ) объекта. В режиме снятия доплеровских спектров или обращенного синтезирования апертуры с использованием узкополосного сигнала РИС-И обеспечивает проведение пространственно-когерентных измерений. Доплеровские портреты представляют собой одномерные изображения объекта – проекции отражательной способности на прямую, перпендикулярную мгновенной угловой скорости вращения и линии визирования.
Если обозначить угловой размер синтезированной апертуры Δ θ , то разрешающая способность в поперечном направлении составит величину:
λ 0
∆ x 1 ≅ 2 ∆Θ .
С точки зрения решения обратной задачи дифракции, принципиальное значение имеет вопрос об информационной эквивалентности пространственных и частотных измерений. Как пространственные, так и частотные измерения могут характеризоваться изменением вектора k в угло-частотном пространстве. Запишем относительное приращение вектора в форме
— = —e k + A® e ® + A ^ sin ® 0 e T , k 0 k 0
где e k = d e Θ e ϕ – орт ы сферической системы координат в точке k = k 0 ;
Δk,ΔΘ,Δφ – соответствующие приращения. Одинаковые приращения волнового вектора по модулю могут быть обеспечены при изменениях его модульного значения или направления, если выполняется условие: = ΔΘ = Δϕsin Θ0 , k0
где Θ0 – значение ракурсного угла в точке k 0. Из этого выражения и равенства k 0= 4 π f 0/ с следует соотношение эквивалентности
∆F/f0 = ∆Θ , определяющее условие равного разрешения в продольном и поперечном направлениях, выполнение которого целесообразно при синтезе двумерных изображений. Это условие обычно реализуется при снятии радиально-доплеровских портретов (РДП), т.е. при когерентной пространственной обработке широкополосного сигнала, что обеспечивает получение двумерных изображений в координатах «кросс-дальность (частота Доплера) – дальность». Область в угло-частотном пространстве, соответствующая таким измерениям, показана на рис. 1.4.
1 - широкополосные изменения,
2 - доплеровские,
3 - радиально-доплеровские
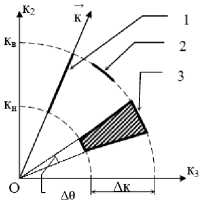
Рис. 1.4. Области в угло-частотном пространстве, соответствующие режимам когерентных измерений
Особенности наблюдения ВОКО, находящихся на геостационарных орбитах, заключаются в том, что ракурсность измерений меньше, чем при наблюдении НОКО. Это может привести к практической невозможности достижения требуемой разрешающей способности в поперечном направлении.
Таким образом, любые виды измерений, проводимые РИС-И, могут быть представлены в угло-частотном пространстве значениями ККР или ЭПР. В общем случае вид области наблюдения представляет собой сферический сегмент и определяется параметрами движения и собственного вращения ИСЗ; видом используемого сигнала и когерентностью проводимой обработки или режимом функционирования РИС-И.
Список литературы Оценка потенциальной информативности сигнальных радиолокационных измерений космических объектов
- Козлов Н.Н., Лучин А.А., Труфанов Е.Ю. Радиоинформационные системы. Математическое обеспечение проектирования, испытаний и функционирования. -М.: Знание, 2011. -703 с.
- Математическое моделирование и исследование измерительных систем/под ред. В.Л. Макарова. -Киев, 1980. -166 с.
- Козлов Н.Н., Ляшко И.И., Макаров В.Л., Цитрицкий О.Е. Математическое обеспечение сложного эксперимента. -Т. 1. Обработка измерений при исследовании сложных систем/Ю.А. Белов, В.П. Диденко. -Киев: Наук. думка, 1982. -304 с.
- Белов Ю.А., Диденко В.П., Козлов Н.Н., Ляшко И.И., Макаров В.Л., Цитрицкий О.Е. Математическое обеспечение сложного эксперимента. -Т. 2. Математические модели при измерениях. -Киев: Наук. думка, 1983. -264 с.
- Белов Ю.А., Козлов Н.Н., Ляшко И.И., Макаров В.Л., Цитрицкий О.Е. Математическое обеспечение сложного эксперимента. -Т. 3. Основы теории математического моделирования сложных радиотехнических систем. -Киев: Наук. думка, 1985. -272 с.
- Гладышев А.И. Вопросы математического моделирования радиоинформационных систем.//Вестник Российского нового университета. Серия «Сложные системы: модели, анализ, управление». -2016. -Выпуски 1-2. -С. 46-52.
- Гладышев А.И., Аборкина Е.С. Вопросы применения существующих методов оценки сложности информационных систем//Вестник Российского нового университета. Серия «Сложные системы: модели, анализ, управление». -2016. -Выпуски 1-2. -С. 114-118.
