Оценка применения частотно-регулируемого привода конвейера

Автор: Саржанулы А., Дайч Л.И., Войткевич С.В.
Журнал: Теория и практика современной науки @modern-j
Рубрика: Основной раздел
Статья в выпуске: 3 (57), 2020 года.
Бесплатный доступ
Статья посвящена моделированию асинхронного двигателя при использовании прямого пуска двигателя и системы управления с преобразователем частоты с автономным инвертором напряжения. Выделяются и описываются характерные особенности для построения и моделирования сложных электромеханических систем приложения Simulink и SimPowerSystem, которые входят в пакет прикладных программ Matlab. В процессе работы были произведены моделирования двух разных вариантов пуска асинхронного двигателя: пуск двигателя от трехфазного источника напряжения;уск двигателя с помощью частотного преобразователя. Данное направление также дополняется сравнительным анализом привода с частотным преобразователем
Частотный преобразователь, асинхронный двигатель
Короткий адрес: https://sciup.org/140275309
IDR: 140275309 | УДК: 62-531.6
Evaluation of the use of the frequency regulated conveyor drive
The article is devoted to modeling an induction motor when using direct start of the motor and control system with a frequency converter with an autonomous voltage inverter. The characteristic features for constructing and modeling complex electromechanical systems of the Simulink and SimPowerSystem applications, which are part of the Matlab application package, are highlighted and described. In the process of work, simulations of two different options for starting an induction motor were made: direct engine start from a three-phase voltage source; starting the engine using a frequency converter. This direction is also supplemented by a comparative analysis of the drive with and without a frequency converter.
Текст научной статьи Оценка применения частотно-регулируемого привода конвейера
Одним из путей решения увеличения производительности труда является повышение уровня автоматизации производства, что может быть достигнуто за счет оптимизации режимов работы оборудования.
Конвейеры имеют важную роль в современных технологических процессах. Их применение позволяет увеличить производства труда.
Аналоговые комплексы автоматизированного управления конвейерами, широко применяемые в настоящее время, заметно снижают производительность. В связи с этим возникает необходимость в автоматизированных системах контроля и управления ленточными конвейерами, построенных на современных устройствах.
Конвейеры классифицируются по принципу работы, конструктивной составляющей и по области применения. АСУ конвейерных установок осуществляют следующие функции: автоматизация запуска и остановки конвейерных машин с центрального пульта управления; проверка оборудования перед ее запуском; осуществление дополнительных задач в процессе перемещения материалов.
Ленточные конвейеры являются наиболее распространенными видами и применяются в машиностроении, приборостроении, на открытых горных работах и в шахтах. Основой конвейера представляется бесконечно-замкнутая упругая лента. Движение ленты осуществляется с помощью барабанов, которые приводятся в движения электроприводом через редуктор.Долгое время в приводах конвейеров использовались нерегулируемые электроприводы на базе асинхронного двигателя. В связи с повышением требований к качеству технологических процессов появилась необходимость в регулировании скорости приводов.
Частотный преобразователь позволяет осуществлять регулирование частоты вращения асинхронного двигателя. Современные частотные преобразователи подходят как для однодвигательных систем, так и для многодвигательных. Применение частотных преобразователей позволяет решить следующие задачи: плавный пуск; плавная остановка; оперативное изменение динамики разгона и торможения. Частотный преобразователь позволяет изменять скорость нелинейно. С помощью точного управления вращательным моментом частотный преобразователь исключает вероятность «опрокидывания». Система обратной связи даёт возможность точно контролировать текущую скорость и реагировать на ее отклонение. Поэтому двигатель может поддерживать заданную скорость очень точно. Когда конвейер приводится в движение несколькими двигателями, их работа должна быть синхронизирована. Эта задача также эффективно решается с помощью частотного преобразователя.Структурная схема преобразователя частоты представлена на рисунке 1. Преобразователь состоит из следующих основных частей: звена постоянного тока (ЗПТ), содержащего неуправляемый выпрямитель с фильтром рисунок 2; мостового трехфазного инвертора, выполненного на IGBT-транзисторах; системы управления; блока питания БП; датчиков тока ДТ. Выпрямитель осуществляет преобразование трехфазного переменного напряжения сети питания в выпрямленное напряжение постоянной амплитуды.
Инвертор посредством широтно-импульсного модулирования преобразует постоянное напряжение в переменное квазисинусоидальное регулируемой частотой f и амплитудой U. Через цепь постоянного тока передается активная мощность из сети к двигателю. Для циркуляции реактивной мощности, которая необходима для создания электромагнитного поля асинхронного двигателя, образуется цепь: обмотки статора двигателя — обратные диоды, шунтирующие транзисторные ключи — конденсаторы фильтра. При запирании ключей индуктивные токи замыкаются через диоды на конденсатор фильтра, не вызывая перенапряжений.
Силовой блок
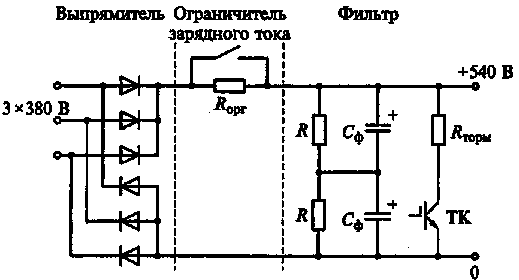
Рисунок 2 - Принципиальная схема звена постоянного тока (ЗПТ)
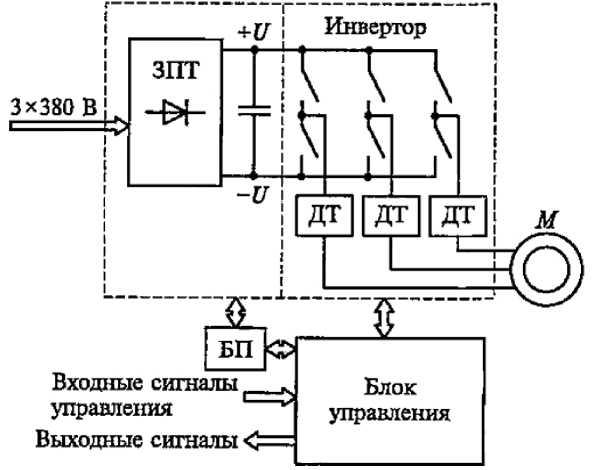
Рисунок 1- Структурная схема преобразователей частоты преобразователя частоты
Rогр — резистор ограничения тока заряда конденсатора;
Rторм -тормозной резистор; ТК — транзисторный ключ;
Сф — конденсатор фильтра;
Целю выполненой работы является подтверждение выбранного решения по замене нерегулируемого асинхронного электропривода на регулируемый, с преобразователем частоты. Было принято решение сравнительный анализ проводить по результатам имитационного моделирования.
Для этого были разработаны имитационные модели асинхронного электропривода с прямым пуском и с применением частотного преобразователя.
Для моделирования был выбран пакет прикладных программ Simulink. Он входит в программный пакет MatLab, предназначенный для аналитического и численного решения математических задач, а также для моделирования электротехнических и электромеханических систем. MatLab получил наиболее распространенное применение в инженерной практике.
Библиотека блоков SimPowerSystems является одной из множества дополнительных библиотек Simulink, ориентированных на моделирование электромеханических и электроэнергетических систем и устройств. SimPowerSystems содержит набор блоков для имитационного моделирования электротехнических устройств. В состав библиотеки входят модели пассивных и активных электротехнических элементов, источников энергии, электродвигателей, трансформаторов, линий электропередачи и прочего оборудования.
Применяя возможности Simulink, SimPowerSystems и других библиотек, было проведено моделирование и сравнительный анализ нерегулируемого асинхронного электропривода и регулируемого, с преобразователем частоты.
В таблице 1 приведены справочные данные двигателя, применяемые в процессе построения имитационной модели. На рисунке 3 приведена модель прямого пуска асинхронного двигателя.
Перед началом моделирования необходимо перенести в окно настроек параметров модели параметры двигателя. Окно параметрирования двигателя приведено на рисунке 4.
Таблица 1 – Параметры асинхронного двигателя для моделирования
|
Наименование параметра |
Значение |
|
Мощность |
200 кВт |
|
Синхронная частота вращения |
1000 об/мин |
|
Номинальная частота вращения |
978 об/мин |
|
Номинальное скольжение |
2,2 % |
|
КПД |
0,945 |
|
Коэффициент мощности |
0,9 |
|
Номинальное напряжение |
1140 В |
|
Отношение пускового тока к номинальному |
7 |
|
Отношение пускового момента к номинальному |
1,6 |
|
Момент инерции |
8,8 кг*м2 |
|
Число пар полюсов |
3 |
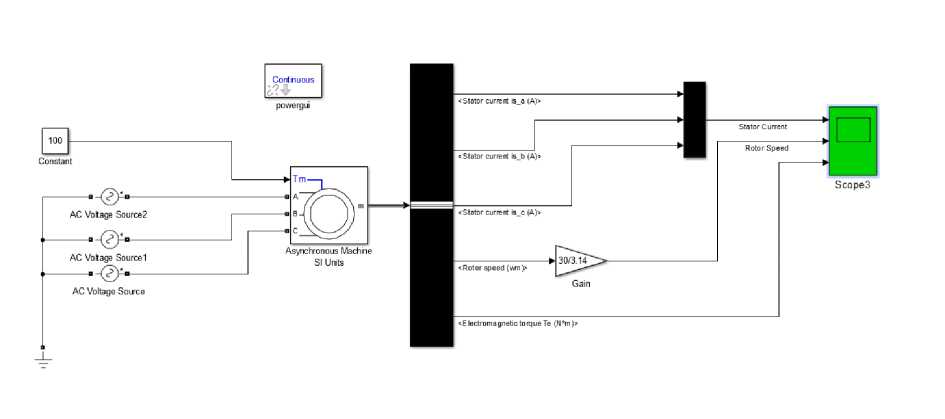
Рисунок 3 - Модель прямого пуска асинхронного двигателя
В процессе моделирования было оценено соответствие рассматриваемой модели реальному электроприводу. Для этого рассматривались различные режимы работы электропривода, такие как: пуск на холостом ходу; пуск под нагрузкой; изменение знака момента сопротивления на валу двигателя; торможение двигателя свободным выбегом без нагрузки и т.д. Во всех рассматриваемых режимах поведение разработанной модели соответствовало поведению реального электропривода с асинхронным двигателем.
По результатам проведенного моделирования мы получили динамические зависимости двигателя (ток статора, частоту вращения, двигательный момент) при прямом пуске под нагрузкой. На рисунке 5 приведена часть результатов моделирования, отражающая ток статора, частоту вращения и двигательный момент при прямом пуске асинхронного двигателя.
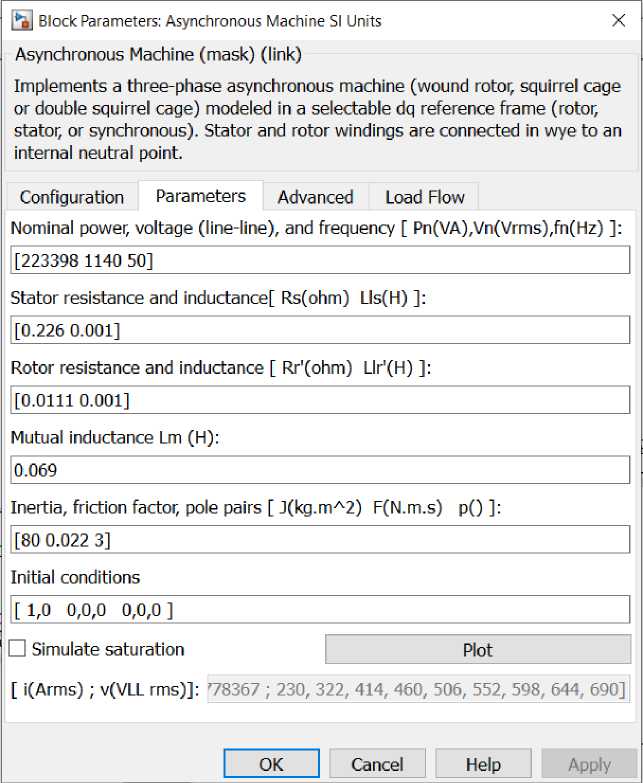
Рисунок 4 - Окно параметров асинхронного двигателя в пакете Simulink
По результатам проведенного моделирования мы получили динамические зависимости двигателя (ток статора, частоту вращения, двигательный момент) при прямом пуске под нагрузкой. * Scope3 -OX
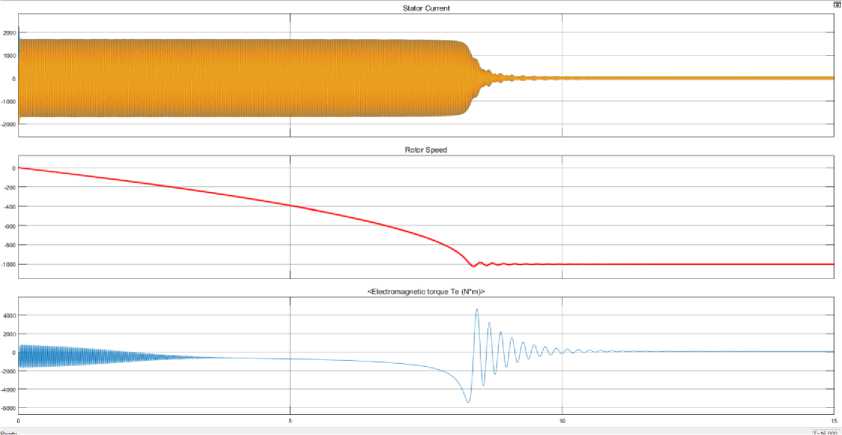
Рисунок 5 – Ток статора, частота вращения и двигательный момент при прямом пуске под нагрузкой асинхронного двигателя
Далее была разработана имитационная модель асинхронного двигателя с преобразователем частоты и автономным инвертором напряжения. Реализация разработанной математической модели, также как и при прямом пуске, осуществлялась с помощью пакета программ MatLab (приложения Simulink и библиотеки SimPowerSystems).
Регулирование скорости асинхронного двигателя возможно изменением напряжения и частоты источника питания, который может работать в режиме источника напряжения или источника тока. Следовательно, регулирование скорости и момента на валу электродвигателя возможно изменением напряжения источника питания при f = const, изменением частоты и напряжения источника питания (скалярное частотное управление), изменением частоты и тока статорной обмотки (скалярное частотно-токовое управление), изменением частоты и текущих значений переменных асинхронного двигателя и взаимной ориентацией их векторов в полярной или декартовой системе координат (векторное управление).
На рисунке 5 приведена имитационная модель частотно-регулируемого привода асинхронным двигателем. На рисунке 6 приведена подробная модель системы электропривода ПЧ-АДКЗ с АИ.
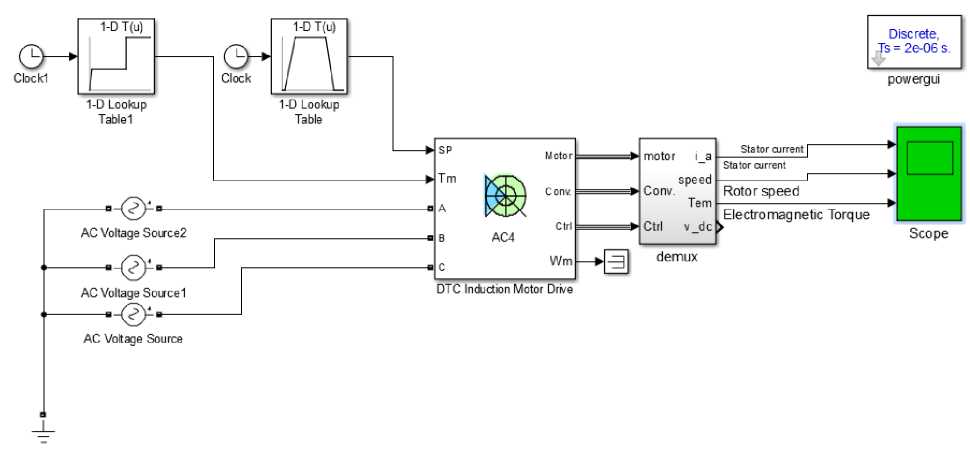
Рисунок 6 - Структура модели асинхронного двигателя с преобразователем частоты и автономным инвертором напряжения На рисунке 7 приведена часть результатов моделирования, отражающая ток статора, частоту вращения и двигательный момент при пуске асинхронного двигателя с преобразователем частоты. Применение преобразователя частоты позволяет сформировать любую желаемую диаграмму разгона (и торможения) асинхронного двигателя. Анализируя результаты моделирования прямого пуска асинхронного привода видно, что в течении разгона ток статора двигателя превышает ток статора после завершения разгона более чем в 8 раз.
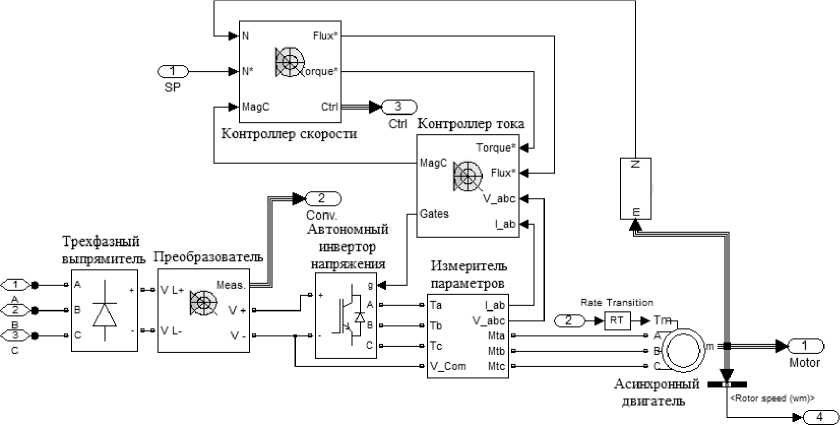
Рисунок 7 - Структура блока системы электропривода ПЧ-АДКЗ с АИН
Анализируя результаты моделирования пуска асинхронного привода с преобразователем частоты видно, что ограничение динамики разгона за счет ограничения заданной скорости снизило превышение пускового тока. В приведенном эксперименте пусковой ток не превышает рабочий больше, чем в 2 раза.
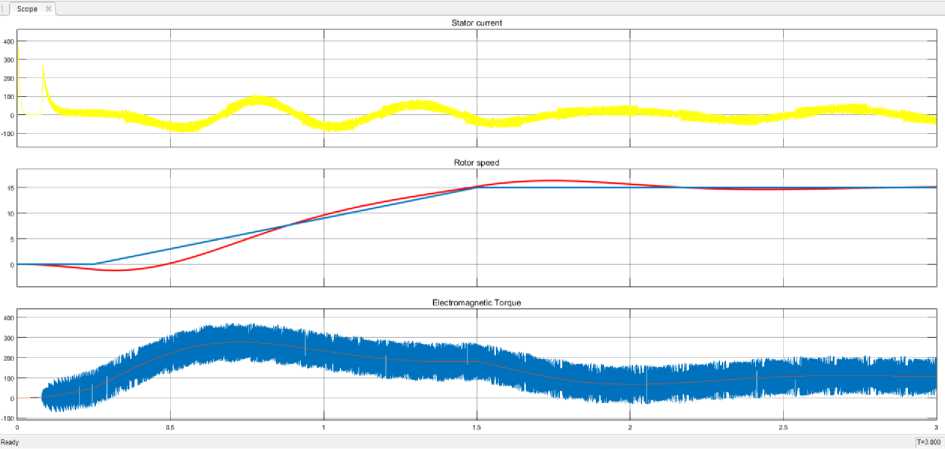
Рисунок 8 – Ток статора, частота вращения и двигательный момент при пуске асинхронного двигателя с преобразователем частоты и автономным инвертором напряжения.
Также, из приведенных графиков видно, что наличие активного момента сопротивления в момент пуска начинает раскручивать двигатель в направлении, противоположном заданному.
Выводы:
Предложенное решение по введению в асинхронный электропривод частотного преобразователя оправданно, так как помимо появившейся возможности улучшения управляемости технологическим процессом, пусковые токи существенно снижаются. Снижение пусковых токов позволяет упростить систему электроснабжения привода и повысить селективность системы токовой защиты.
Список литературы Оценка применения частотно-регулируемого привода конвейера
- А. С. Семёнов, Моделирование режимов работы асинхронного двигателя в пакете программ Matlab. Вестник СВФУ, 2014, том 11, № 1 c. 51-59.
- В. Г. Макаров, В. А. Гусельников Модель трехфазного асинхронного двигателя с короткозамкнутым ротором в пакете Matlab. Вестник технологического университета. 2016. Т.19, №10. с. 109-112.
- Семёнов А. С., Пак А. Л., Моделирование режима пуска электродвигателя погрузочно-доставочных машин применительно к рудникам по добыче алмазосодержащих пород. Приволжский научный вестник. Ижевск, 2012. № 11 (15). c. 17-23.
