Оценка угловой скорости отделения наноспутника формата Cube Sat от транспортно-пускового контейнера

Автор: Баринова Елена Витальевна, Лапшова Елена Александровна
Журнал: Космическая техника и технологии @ktt-energia
Рубрика: Динамика, баллистика, управление движением летательных аппаратов
Статья в выпуске: 2 (49), 2025 года.
Бесплатный доступ
Наноспутники (НС) формата CubeSat продолжают набирать всё большую популярность. Чаще всего их запуск осуществляется с помощью транспортнопусковых контейнеров (ТПК), которые работают как интерфейс между НС и ракетой-носителем. При этом в процессе выхода из ТПК НС приобретает угловую скорость относительно центра масс. Поскольку для выполнения ряда целевых задач важно обеспечивать определённую ориентацию НС в пространстве, возникает задача оценки угловой скорости отделения. В данной работе приводится математическая модель процесса отделения НС формата CubeSat от ТПК типа P-POD. Также проводится статистическое моделирование с учётом погрешности определения параметров наноспутника и его случайного расположения внутри ТПК. В качестве примера рассматривается НС SamSat-ION, созданный в Самарском университете. Полученная в данной работе математическая модель может быть полезна разработчикам наноспутников для оценки угловой скорости отделения НС.
Наноспутник, транспортно-пусковой контейнер, угловая скорость отделения, процесс отделения
Короткий адрес: https://sciup.org/143184746
IDR: 143184746 | УДК: 629.783-022.532
Estimate of angular velocity of CubeSat nanosatellite separation from orbital deployer
CubeSat nanosatellites (NS) continue to acquire popularity. Most commonly, they are launched using orbital deployers, which act as an interface between the NS and the launch vehicle. When getting out of the orbital deployer, a nanosatellite acquires angular velocity relative to its center of inertia. Since it is important to maintain a specific space orientation of a nanosatellite for a number of objectives, a need arises to estimate the separation angular velocity. In this paper we preset a mathematical model of the separation process of CubeSat nanosatellites from P-POD-type orbital deploy er. Statistical modeling is also performed with regard to measurement errors of the nanosatellite parameters and its random location inside the orbital deployer. As an example, the SamSat-ION nanosatellite developed at Samara University is considered. The mathematical model obtained in this work may be useful for nanosatellite developers for estimating the separation angular velocity of a nanosatellite.
Текст научной статьи Оценка угловой скорости отделения наноспутника формата Cube Sat от транспортно-пускового контейнера
Наноспутники (НС) — это малые космические аппараты массой 1…10 кг [1]. Несмотря на небольшой размер, современные НС имеют широкую область применения: научно-образовательные программы, реализация технологических экспериментов, мониторинг околоземного пространства [2], дистанционное зондирование Земли [3], исследования геофизических полей, инспекция космического мусора [4], астрономические наблюдения и др. Основным преимуществом данного формата является открытость и стандартизированная архитектура, которая позволяет быстро и при сравнительно небольших финансовых затратах создавать бортовые системы космического назначения, используя коммерческие комплектующие [5].
Обычно запуск НС происходит с помощью транспортно-пусковых контейнеров (ТПК). Это система, позволяющая доставить НС на орбиту, минимизировав нагрузки, которые действуют на него при транспортировке на космодром, а также в процессе выведения на орбиту со стороны ракеты-носителя (РН). Также с помощью ТПК производится отделение НС после его доставки на рабочую орбиту.
ТПК является вторичной полезной нагрузкой и работает как интерфейс между НС и РН. Поскольку вторичная полезная нагрузка создаёт дополнительный риск для любой миссии, нужно минимизировать вероятность ошибок путём создания стандартизированной вторичной полезной нагрузки, которую знают и которой доверяют поставщики запусков. ТПК должен сохранять свою структурную целостность, несмотря на любые структурные сбои, которые могут возникнуть в самом пусковом устройстве или в НС. ТПК электрически и механически изолирует НС от остальной части РН, снижая риск повреждения в результате возникновения нештатных ситуаций. Основные задачи, которые выполняет ТПК — защита РН и основной полезной нагрузки; обеспечение безопасного и надёжного процесса отделения НС; обеспечение возможности запуска НС на различных РН [6].
Между НС и направляющими ТПК существуют зазоры, которые оказывают существенное влияние на возникновение угловой скорости вокруг центра масс (ЦМ) НС при его отделении. Зная диапазон угловой скорости отделения НС вокруг его ЦМ, можно эффективнее обеспечить нужную ориентацию и стабилизацию НС, а также более точно определить количество ресурсов, необходимых для демпфирования угловой скорости. Таким образом, задача исследования движения НС при отделении от ТПК является актуальной. Этому вопросу посвящены работы российских и зарубежных авторов. Например, в работе [7] проводится оценка угловой скорости космического аппарата на основе кватернионных и векторных измерений. Авторы работы [8] описывают процесс отделения моделями виброударов с одной и тремя степенями свободы для различных стадий развёртывания. На основании полученной модели проводится оценка угловой скорости отделения НС. В работе [9] исследуется процесс отделения НС от ТПК в случае плоского движения. Построена математическая модель движения НС внутри ТПК, а также приведены оценки влияния параметров НС и ТПК на скорости отделения.
В данной работе рассматривается процесс отделения НС от ТПК типа P-POD в случае пространственного движения. Составленная математическая модель позволяет произвести оценку закручивания НС по трём осям, а также определить изменение линейной скорости и сил реакции опор со стороны направляющих ТПК. Кроме того, в работе проводится статистическое моделирование процесса отделения НС от ТПК, учитывающее случайное начальное положение НС в контейнере, а также погрешности определения массо-центровочных и инерционных характеристик НС.
В качестве примера рассматривается НС SamSat-ION , созданный в Самарском университете. Он был выведен на орбиту 27 июня 2023 г. с космодрома Восточный в рамках программы «УниверСат» [10].
Математическая модель процесса отделения наноспутника от транспортно-пускового контейнера
Запуск НС в основном происходит с помощью ТПК типа P-POD ( Poly-Picosatellite Orbital Deployer [6, 11]), основанных на пружинном толкателе. Это наиболее простой способ выведения на орбиту НС формата CubeSat для университетов или небольших компаний, так как они сравнительно недорогие, а также достаточно просты в применении. Стандартное устройство развёртывания P-POD вмещает три CubeSat 1U , но конструкция также может быть удлинена, чтобы вместить большее количество НС.
Во время развёртывания НС перемещается по направляющим, встроенным в углы трубы. Конструкция трубы обеспечивает отделение НС без значительного вращения. Данный ТПК отличается тем, что в нём нет механизма для фиксации НС внутри трубы, что снижает вероятность заклинивания НС при его отделении [6, 12].
В данной работе при построении математической модели используются три системы координат (СК):
-
1. СК Ox 0 y 0 z 0 жёстко связана с ТПК. Ось x 0 направлена вдоль продольной оси ТПК, ось y 0 направлена вдоль поперечной оси ТПК, ось z 0 дополняет систему до правой.
-
2. Базовая СК Bxb yb zb . Начало базовой СК находится в геометрическом центре торца НС, ближайшего к платформе толкателя, ось xb направлена вдоль продольной оси НС, оси yb и zb направлены параллельно рёбрам НС таким образом, чтобы СК была правой.
-
3. Центральная СК Cxyz расположена в ЦМ НС. Её оси параллельны
осям базовой СК, а положение начала координат относительно базовой СК определяется координатами xC , yC и zC .
При построении модели предполагаем, что НС и ТПК — абсолютно твёрдые тела; движение НС происходит только под действием силы пружинного толкателя; силу трения не учитываем; толщиной и массой платформы толкателя пренебрегаем. НС и ТПК рассматриваем как прямоугольные параллелепипеды, без учёта элементов, находящихся за пределами габаритов рамы НС. Раму полагаем изготовленной точно, возможным её искривлением пренебрегаем [13].
Движение НС рассматривается относительно СК Ox 0 y 0 z 0. Положение НС в пространстве определяется с шестью переменными: х , у , z — координаты ЦМ НС в СК Ox 0 y 0 z 0; ψ , θ , ϕ — углы поворота НС ( ψ — угол между проекцией продольной оси НС на плоскость ТПК Ox 0 y 0 и осью Ox 0; θ — угол между проекцией продольной оси НС на плоскость ТПК Ox 0 z 0 и осью Ox 0; ϕ — угол собственного вращения НС).
Принимается допущение, что в начальный момент времени НС повёрнут так, что он касается направляющих ТПК в четырёх точках: P 1, P 2, P 3, P 4. На рис. 1–3 приведены проекции положения НС формата CubeSat 3U в ТПК в процессе отделения.
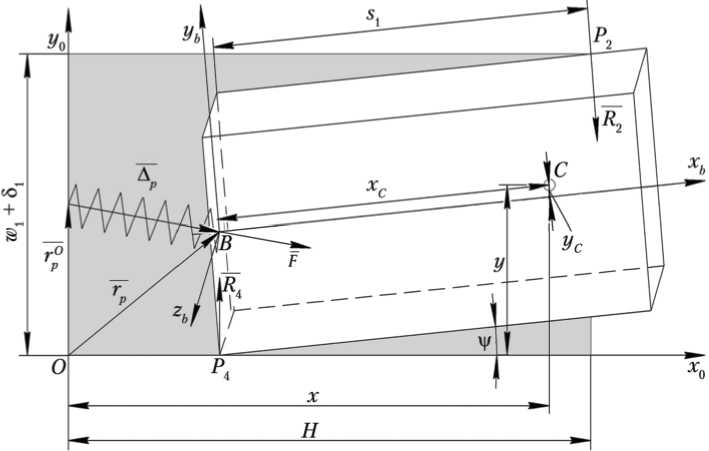
Рис. 1. Положение наноспутника (НС) в транспортно-пусковом контейнере (ТПК) (горизонтальная проекция): Ox 0 y 0 z 0 — жёстко связанная с ТПК система координат (СК); Bxbybzb — базовая СК; rp — радиус-вектор точки B в СК Ox 0 y 0 z 0 ; rpO — радиус-вектор крепления пружины в СК Ox 0 y 0 z 0 ; ψ — угол между проекцией продольной оси НС на плоскость ТПК Ox 0 y 0 и осью Ox 0 ; х, у — координаты ЦМ НС в СК Ox 0 y 0 z 0 ; С — центр масс (ЦМ) НС; xC — смещение ЦМ НС относительно задней торцевой части по оси х; yC — смещение ЦМ НС относительно его геометрического центра по оси y; w 1 — поперечный размер –НС; δ1 — величина зазора между Н–С и направляющими ТПК; Н — длина ТПК; F –— с–ила пружинного толкателя; Δ p — вектор перемещения платформы толкателя; R 2 , R 4 — силы реакции, действующие на НС со стороны направляющих ТПК; P 2 , P 4 — точки контакта НС с направляющими ТПК; s 1 — расстояние от точки контакта P 2 до оси yb (рисунок создан авторами)
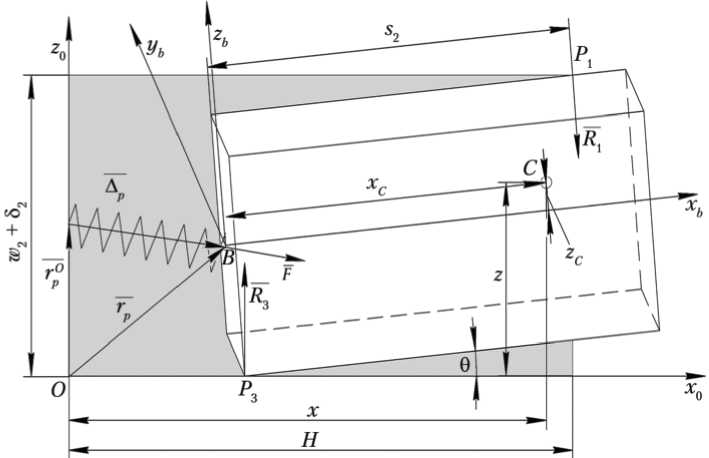
Рис. 2. Положение наноспутника (НС) в транспортно-пусковом контейнере (ТПК) (фронтальная проекция): Ox 0 y 0 z 0 — жёстко связанная с ТПК система координат (СК); Bxbybzb — базовая СК; rp — радиус-вектор точки B в СК Ox 0 y 0 z 0 ; rpO — радиус-вектор крепления пружины в СК Ox 0 y 0 z 0 ; θ — угол между проекцией продольной оси НС на плоскость ТПК Ox 0 z 0 и осью Ox 0 ; х, z — координаты центра масс (ЦМ) НС в СК Ox 0 y 0 z 0 ; С — ЦМ НС; xC — смещение ЦМ НС относительно задней торцевой части по оси х; zC — смещение ЦМ НС относительно его геометрического центра по оси z; w 2 — поперечный размер НС; δ2 — величина зазора между НС и направляющими ТПК; Н — длина ТПК; F — сила пружинного толкателя; Δ p — вектор перемещения платформы толкателя; R 1 , R 3 — силы реакции, действующие на НС со стороны направляющих ТПК; P 1 , P 3 — точки контакта НС с направляющими ТПК; s 2 — расстояние от точки контакта P 1 до оси zb (рисунок создан авторами)
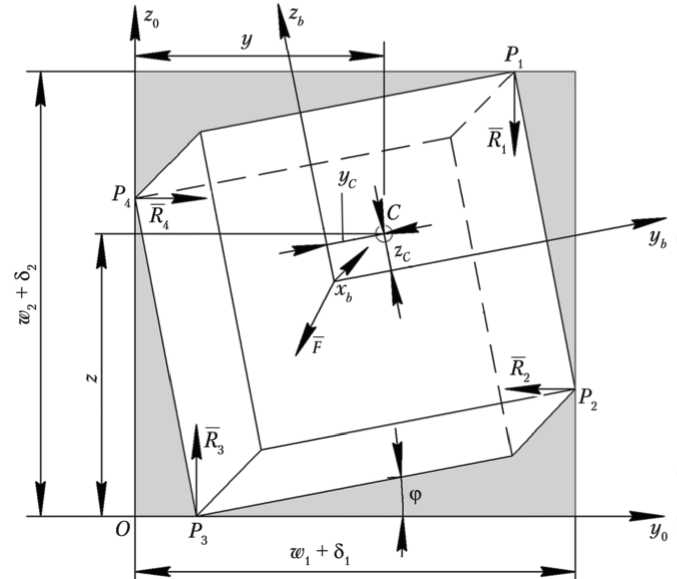
Рис. 3. Положение наноспутника (НС) в транспортно-пусковом контейнере (ТПК) (профильная проекция): Ox 0 y 0 z 0 — жёстко связанная с ТПК система координат (СК); Bxbybzb — базовая СК; ϕ — угол собственного вращения НС; х, у, z — координаты центра масс (ЦМ) НС в СК Ox 0 y 0 z 0 ; С — координата ЦМ НС; yC, zC — смещения ЦМ НС относительно его геометрического центра по осям y и z соответственно; w 1 , w 2 — поперечные размеры НС; δ1 , δ2 — величины зазоров между НС и направляющими ТПК; F — сила пружинного толкателя; Δ p — вектор перемещения платформы толкателя; R 1 , R 2 , R 3 , R 4 — силы реакции, действующие на НС со стороны направляющих ТПК; P 1 , P 2 , P 3 , P 4 — точки контакта НС с направляющими ТПК (рисунок создан авторами)
Отделение НС происходит под действием силы пружинного толкателя F , которая передаётся от пластины выталкивающего механизма в центр торцевой части НС. Её модуль рассчитывается следующим образом:
по осям y и z соответственно; w 1, w 2 — поперечные размеры НС; δ 1, δ 2 — величины зазоров между НС и направляющими ТПК.
Проекции силы упругости на оси СК, связанной с ТПК ( Ox 0 y 0 z 0):
^^^^^^^^^^^^^^^
F = P0 – cx |Δp |, где cx — жёсткость пружины; P0 — начальное усили–е толкателя, P0 = cxhp; hp — ход толкателя; Δp — вектор перемещения платформы толкателя, который вычисляется по следующей формуле:
Fx = F
Fy = F
A px
। AJ
A py
I AJ
(A px
A py
A pz
|
xC |
x |
||
|
= DT |
– yC |
+ y |
+ |
|
– zC |
w i + 8 i
W 2 + 8 2
где D — матрица перехода от СК Ox 0 y 0 z 0, связанной с ТПК, к базовой СК Bxbybzb , связанной с НС; xC — смещение ЦМ НС относительно задней торцевой части по оси х ; yC , zC — смещения ЦМ НС относительно его геометрического центра
Fz = F
A pz
I Д P I ’
Проекции силы упругости на оси базовой СК ( Bxbybzb ):
F xb = DF x ;
F yb = DF y ;
F zb = DF z .
Уравнения пространственного движения НС в процессе отделения имеют следующий вид:
mx = F x + R 1 sin 0 + R 2 sin v ;
my = F y + R 4 - R 2 cos y ;
mz = F z + R 3 - R 1 cos 0 ;
J 1 V = F xb y c - F yb x C - R 2 s 1 – xC
– R 4 xC cos ψ cos θ
w 1
2 + y C
sin ψ cos ϕ ;
J 2 Ф = - Fyb z C – Fzb y C ×
× R 1
+ R 2
w 1
2 – yC
w 2
2 – zC tg ϕ cos ϕ cos ψ + R 3
w 1
2 + yC
w 2
2 + zC tg ϕ cos ϕ cos ψ +
w 2
2 + zC
w 1
2 – yC tg ϕ cos ϕ cos θ + R 4
J 3 θ = FxbzC – FzbxC – R 1 s 2 – xC
– R 3 xC cos θ
C
w 2
2 – zC
w 1
2 + yC tg ϕ cos ϕ cos θ
;
w 2
2 + zC sin θ
cos ψ cos ϕ ,
где m — масса наноспутника; знак «“» обозначает вторую производную по времени; R1, R2, R3, R4 — силы реакции, действующие на НС со стороны направляющих ТПК (см. рис. 3); J1, J2, J3 – моменты инерции относительно осей z, x, y соответственно; s1 — расстояние от точки контакта P2 до оси yb; s2 — расстояние от точки контакта P1 до оси zb. Расстояния s1 и s2 вычисляются по следующим формулам:
s 1 = H – x + xC cos ψ +
w 1
2 (cos ϕ + sin ϕ ) – yC
sin ψ ;
s 2 = H – x + xC cos θ +
w 2
2 (cos ϕ + sin ϕ ) – xC
sin θ ,
где Н — длина ТПК.
Чтобы учесть контакт НС с направляющими ТПК в точках P 1, P 2,
H – x – ( s 2 – xC )cos θ cos ψ + 2 – z
2 C C
H – x – (s1 – xC)cosψ cosθ + 21 – yC w2
-
2 + zC cos θ cos ϕ + xC sin θ – z = 0;
w 1
-
2 + yC cos ψ cos ϕ + xC sin ψ – y = 0.
P 3, P 4, систему уравнений (1) необходимо дополнить следующими уравнениями связей:
sin θ cos ϕ = 0;
sin ψ cos ϕ = 0;
Системы (1) и (2) образуют систему дифференциально-алгебраических уравнений. Для её решения необходимо дважды продифференцировать уравнения кинематических связей (2). Таким образом, система (1) и дважды продифференцированные уравнения кинематических связей образуют систему линейных уравнений для реакций и ускорений.
Если в процессе отделения потерян контакт НС с какой-либо направляющей ТПК, соответствующая реакция становится равной нулю и из системы исключается соответствующее ей уравнение связи. После этого процесс интегрирования возобновляется до полного выхода НС из контейнера [13].
Разработанная математическая модель не накладывает ограничений на величину моментов инерции НС, однако в предложенном виде работает только для наноспутников, у которых величина смещения ЦМ относительно геометрического центра в поперечном направлении положительна и составляет не менее 0,1 мм. Это обусловлено предположением, что до процесса отделения ТПК с установленным внутри него наноспутником испытывает некоторые вибрационные нагрузки и, таким образом, до начала процесса НС занимает устойчивое положение равновесия, когда он касается направляющих в четырёх точках. В случае, когда в начальный момент времени НС касается направляющих в меньшем количестве точек, например в трёх точках, одна из реакций будет равна нулю на протяжении всего промежутка времени выхода НС из ТПК. Ситуация, когда НС в начальный момент времени касается направляющей только в одной точке, представляется крайне маловероятной.
Моделирование процесса отделения наноспутника SamSat-ION
Разработанная математическая модель позволяет определить угловые скорости отделения для НС форматов CubeSat 1U , CubeSat 2U , CubeSat 3U и CubeSat 6U .
В качестве иллюстрации было проведено моделирование процесса отделения
НС SamSat-ION . Параметры НС и ТПК приведены в табл. 1, 2. Результаты моделирования представлены на рис. 4, 5.
Таблица 1
Параметры транспортно-пускового контейнера (ТПК)
|
Параметр |
Обозначение |
Значение |
|
Длина |
H |
0,36 м |
|
Максимальный зазор между НС и направляющими ТПК по оси у |
δ 1 |
0,2 мм |
|
Максимальный зазор между НС и направляющими ТПК по оси z |
δ 2 |
0,2 мм |
|
Жёсткость пружины |
c x |
33 Н/м |
Примечание . НС — наноспутник.
Таблица 2
Параметры наноспутника (НС) SamSat-ION
|
Параметр |
Обозначение |
Значение |
|
Масса |
m |
3,6 кг |
|
Длина |
l |
0,34 м |
|
Поперечный размер по оси у |
w 1 |
0,1 м |
|
Поперечный размер по оси z |
w 2 |
0,1 м |
|
Смещение центра масс (ЦМ) НС относительно задней торцевой части по оси х |
xC |
0,182 м |
|
Смещение ЦМ НС относительно задней торцевой части по оси у |
yC |
0,004 м |
|
Смещение ЦМ НС относительно задней торцевой части по оси z |
zC |
0,001 м |
|
Момент инерции относительно оси х |
J 2 |
0,008кг∙м2 |
|
Момент инерции относительно оси у |
J 3 |
0,037кг∙м2 |
|
Момент инерции относительно оси z |
J 1 |
0,038кг∙м2 |
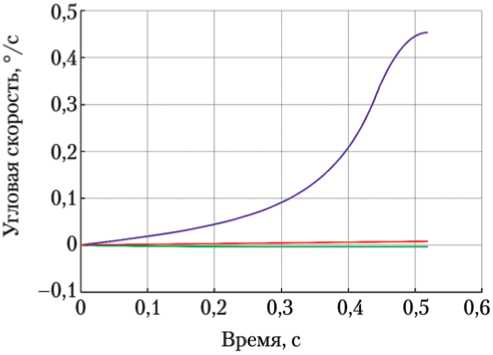
Рис. 4. Изменение угловой скорости наноспутника ω при выходе из транспортно-пускового контейнера: ---- — ш^, угловая скорость НС вокруг оси z; ---- — ш^, угловая скорость НС вокруг оси х; ---- — шв, угловая скорость НС вокруг оси y (рисунок создан авторами)
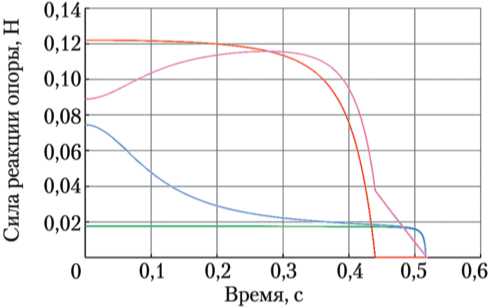
Рис. 5. Изменение сил реакции опоры наноспутника R 1 , R 2 , R 3 , R 4 при выходе из транспортно-пускового контейнера: — R 1 ; ^^^- — R 2 ; — R 3 ; — R 4 (рисунок создан авторами)
На рис. 4 видно, что в рассматриваемом случае при случайных начальных углах поворота НС в контейнере больше всего НС закручивается вокруг оси z, где угловая скорость и ^ максимальна и равна 0,430 ° /с. Угловая скорость НС вокруг оси у и = 0,016 ° /с. Закручивание НС вокруг продольной оси невелико — угловая скорость вокруг оси х в момент отделения и0 = - 0,005 ° /с.
Графики на рис. 5 позволяют определить количество точек контакта НС с направляющими ТПК в каждый момент времени в процессе движения внутри ТПК. Таким образом, через 0,45 с после начала движения контакт в точке P 2 потерян, реакция R 2 становится равной нулю и не оказывает влияния на дальнейшее движение НС.
Статистическое моделирование процесса отделения наноспутника от транспортно-пускового контейнера
P 1, P 2, P 3, P 4 — в начальный момент времени используется следующая последовательность углов поворота: угол у 0 ^ угол ф 0 ^ угол 0 0 .
-
1. Поворот на угол ^ 0 .
-
2. Поворот на угол ф 0.
-
3. Поворот на угол 0 0.
Угол у 0 принимается случайной величиной, принадлежащей интервалу [0, у max ], где у max — угол, который достигается максимально возможным поворотом НС вокруг оси z . Величину угла у max можно получить из решения следующего уравнения:
l sin V max + w I cos V max = w 1 + 8Г
Далее с учётом выполненного поворота НС на случайный угол у 0 осуществляется поворот на угол ф 0, который определяется из следующего уравнения:
w 2sin ф 0 + l sin у 0cos ф 0 + w 1cos у 0cos ф 0 = w 1 + 5 1.
Угол 0 0 определяется путём решения следующей системы уравнений:
w 2cos 0 osin ф o + w 1sin у 0sin ф 0cos a +
+ l cos y 0sin 0 0 = w 2 + 5 2 ;
< w 1cosу0cosф0 + w 2sinу0sinф0cosa +
+1 cosy0sin00 = w 1 + 51, где a — угол, обозначенный на рис. 6.
При построении математической модели процесса отделения НС от ТПК было выявлено, что значительное влияние на угловую скорость отделения оказывает начальное положение НС внутри ТПК, которое носит случайный характер. Поэтому было проведено статистическое моделирование, которое учитывает случайное начальное положение НС в контейнере.
Для обеспечения касания НС с направляющими ТПК в четырёх точках —
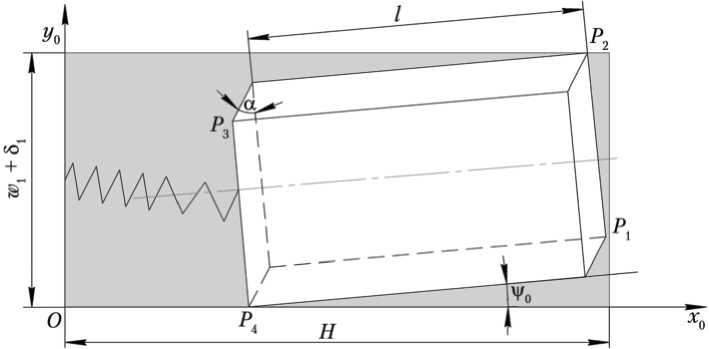
Рис. 6. Проекция положения наноспутника (НС) в транспортно-пусковом контейнере (ТПК) при повороте НС на начальные углы у0, ф0 и 00 (вид сверху): Ox 0 y 0 z 0 — жёстко связанная с ТПК система координат; у0 — начальное значение угла у ; w 1 — поперечный размер НС; 51 — величина зазора между НС и направляющими ТПК; Н — длина ТПК; a — угол между проекциями рёбер НС на плоскость Ox 0 y 0 ; l — длина НС; P 1 , P 2 , P 3 , P 4 — точки контакта НС с направляющими ТПК (рисунок создан авторами)
Таким образом, при последовательных поворотах ψ 0 → ϕ 0 → θ 0 обеспечивается касание НС с направляющими ТПК в точках P 1, P 2, P 3, P 4, где угол ψ 0 — случайная величина, принадлежащая промежутку [0, ψ max], угол ϕ 0 считается максимальным с учётом угла ψ 0, а угол θ 0 — максимальный при случайном ψ 0 и максимальном ϕ 0.
Среди большого количества функций плотности распределения вероятности, наиболее часто используемыми в технических приложениях являются равномерное и нормальное распределения [14]. В работе приведены результаты статистического моделирования процесса отделения НС SamSat-ION для двух случаев: величина ψ 0 распределена по нормальному и равномерному законам.
Нормальный закон распределения. Сначала рассмотрим случай, когда начальный угол ψ0 распределён по нормальному закону. Функция плотности распределения вероятности для нормально распределённой случайной величины ψ0 имеет следующий вид:
pn ( ψ 0) =
У о - М ( У о )
_______1______ е --У )
^(Уо) V2n где M(ψ0) = max — математическое ожидание (МО) случайной величины (СВ) ψ0; σ(ψ0) — среднеквадратическое отклонение (СКО). Согласно правилу «трёх сигм» примем, что в усло-
У тах виях данной задачи σ ( ψ ) = max . 0 6
Для заданной плотности вероятности начального угла ψ 0 по разработанной математической модели была проведена серия 10000 моделирований для параметров НС, приведённых в табл. 2. На рис. 7 приведены результаты статистического моделирования. Полученные характеристики распределения угловой скорости приведены в табл. 3.
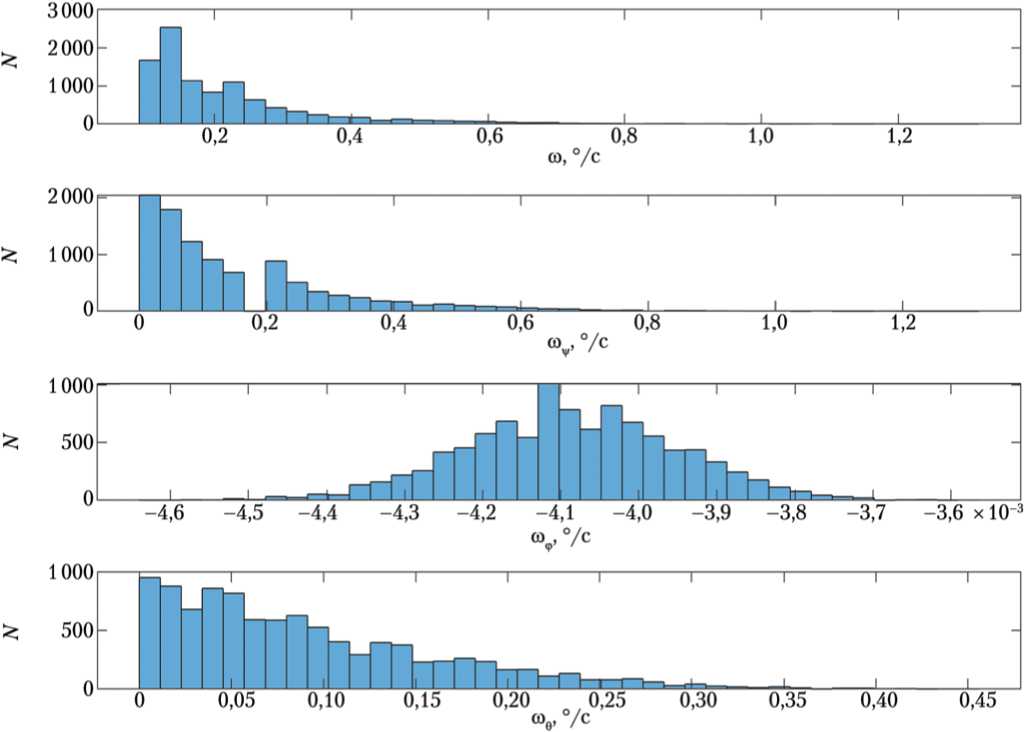
Рис. 7. Гистограммы распределения угловой скорости (значения начального отклонения угла ψ0 распределены по нормальному закону): N — количество моделирований, попадающих в заданный интервал; ω — абсолютная угловая скорость; ωψ , ωϕ , ωθ — угловая скорость вокруг осей z, x, y соответственно (рисунок создан авторами)
Таблица 3
|
Параметр |
МО, °/с |
СКО, °/с |
|
ш |
0,22 |
0,14 |
|
ш V |
0,16 |
0,16 |
|
ш Q |
–0,0040 |
0,0002 |
|
ш |
0,09 |
0,07 |
Примечание . МО — математическое ожидание; СКО — среднеквадратическое отклонение; ш — абсолютная угловая скорость; ю ^ , шф, ю0 — угловая скорость вокруг осей z , x , y соответственно.
Характеристики распределения угловой скорости
Таким образом, при параметрах НС, приведённых в табл. 2, и при условии, что СВ v 0 распределена по нормальному закону, МО абсолютной угловой скорости равно 0,22 ° /с, а СКО — 0,14 ° /с.
Для определения массо-центровочных и инерционных характеристик НС в Самарском университете используется специализированный стенд, который позволяет определять координаты ЦМ с погрешностью не более 0,5 мм и осевые моменты инерции — с погрешностью не более 1,5% [15, 16]. На рис. 8 и в табл. 4 приведены результаты моделирования для случая, когда координаты ЦМ НС — СВ, распределённые по нормальному закону с МО, равными номинальным значениям, а СКО принимается равным 0,2 мм. Моменты инерции J1, J2, J3 распределены по нормальному закону с МО, равными номинальным значениям, и СКО, равными 0,5% от величин номинальных значений.
Характеристики распределения угловой скорости
Шу 7с
Рис. 8. Гистограммы распределения угловой скорости (значения начального отклонения угла v 0 , координаты центра масс и моменты инерции относительно осей x, y, z распределены по нормальному закону): N — количество моделирований, попадающих в заданный интервал; ш — абсолютная угловая скорость; ш ^ , ш ^ , шв — угловая скорость вокруг осей z, x, y соответственно (рисунок создан авторами)
Таблица 4
|
Параметр |
МО, °/с |
СКО, °/с |
|
ш |
0,23 |
0,12 |
|
ш V |
0,16 |
0,16 |
|
ш Q |
–0,0040 |
0,0001 |
|
ш |
0,09 |
0,08 |
Примечание . Обозначения см. в примечании к табл. 3.
По результатам моделирования можно сделать вывод, что МО абсолютной угловой скорости отделения равно 0,23 ° /с со СКО 0,12 ° /с. При сравнении результатов моделирования из табл. 4, 5 и рис. 7, 8 можно заметить, что характеристики распределения изменились не сильно. Это говорит о том, что погрешность, с которой определяются массо-центровочные и инерционные характеристики НС, не оказывает существенного влияния на угловую скорость отделения НС.
Равномерный закон распределения. Проведём статистическое моделирование процесса отделения НС SamSat-ION для случая, когда v 0 распределена по равномерному закону.
Равномерный закон распределения СВ на практике используется, когда отсутствует какая-либо дополнительная информация о СВ, кроме интервала значений, в который попадают её реализации. Это наиболее «грубое» описание СВ, которое позволяет получить «гарантированные» оценки и избежать принятия ошибочных технических решений. Так как в данной задаче нам не известны истинные МО и СКО v0 в случае нормального распределения, то целесообразнее принимать начальный угол v0 распределённым по равномерному закону.
Для СВ у 0, равномерно распределённой на промежутке [0, V max], функция плотности распределения вероятности имеет следующий вид:
0, если v 0< 0;
Рр ( W =
—, если 0 < V < V max ;
' max
0, если V 0 > V max ,
V maxmax где MО^ = ——; о(^0) = главные
вероятностные характеристики распределения.
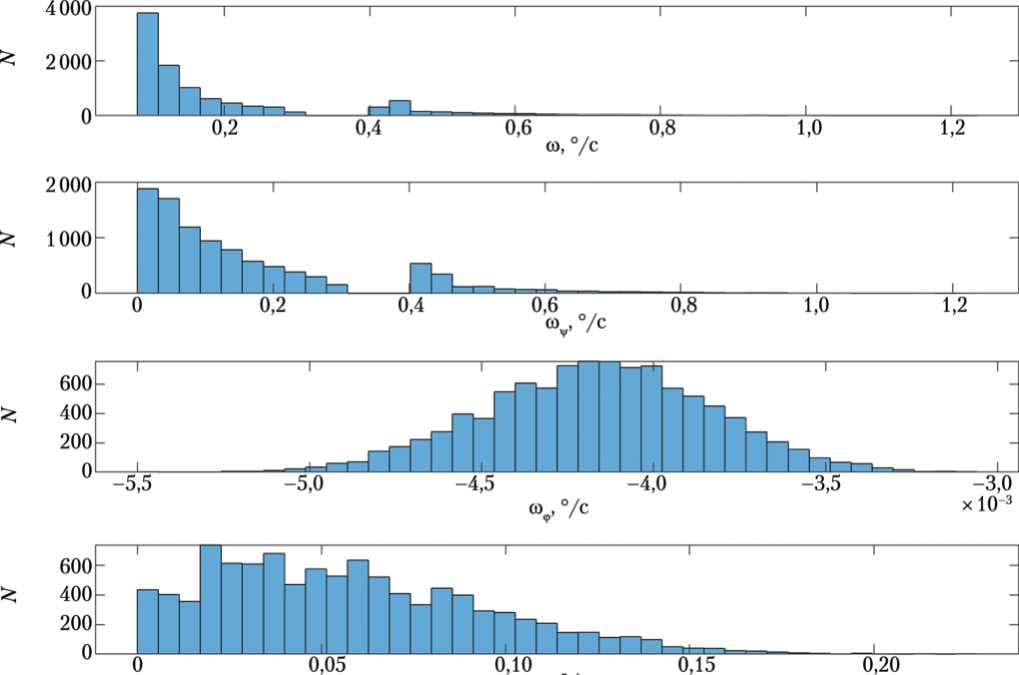
На рис. 9 приведены результаты статистического моделирования (10 000 моделирований) для случая, когда начальный угол v 0 распределён по равномерному
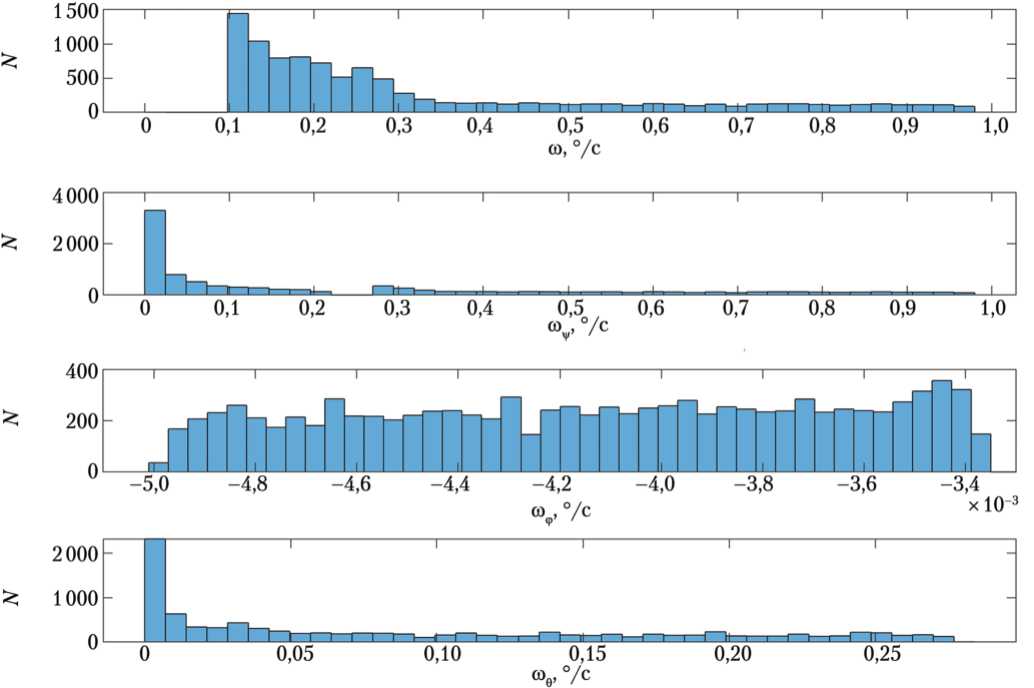
Рис. 9. Гистограммы распределения угловой скорости (значения начального отклонения угла V распределены по равномерному закону, координаты центра масс и моменты инерции относительно осей x, y, z распределены по нормальному закону): N — количество моделирований, попадающих в заданный интервал; ш — абсолютная угловая скорость; ш ^ , ш ^ , шв — угловая скорость вокруг осей z, x, y соответственно (рисунок создан авторами)
закону, а массо-центровочные и инерционные характеристики НС — по нормальному. Полученные характеристики распределения угловой скорости приведены в табл. 5.
Таблица 5
Характеристики распределения угловой скорости
|
Параметр |
МО, °/с |
СКО, °/с |
|
ф |
0,32 |
0,25 |
|
ф V |
0,25 |
0,29 |
|
ф Q |
–0,0040 |
0,0005 |
|
ф в |
0,08 |
0,08 |
Примечание . Обозначения см. в примечании к табл. 3 (с. 112).
Результаты моделирования показали, что МО абсолютной угловой скорости отделения равно 0,32 ° /с, а СКО — 0,25 ° /с.
Сравнивая результаты моделирований из табл. 4, 5, можно заметить, что МО абсолютной угловой скорости выше в случае равномерного распределения угла у 0. Это связано с тем, что равномерный закон распределения даёт более общую оценку угловой скорости отделения НС.
Моделирование показало, что оба случая распределения согласуются с практическими результатами, полученными при запуске НС SamSat-ION , угловая скорость отделения которого по предварительным результатам лётных испытаний составила 0,3-0,5 ° /с.
Выводы
В данной работе приведена математическая модель процесса отделения НС формата CubeSat от ТПК типа P-POD . В модели учитывается влияние пластины толкателя ТПК, действие сил реакции опоры со стороны направляющих ТПК, а также жёсткость пружины. С помощью этой модели можно исследовать процесс отделения НС следующих форматов: CubeSat 1U , CubeSat 2U , CubeSat 3U , CubeSat 6U .
Было проведено статистическое моделирование процесса отделения НС SamSat-ION от ТПК, которое учитывает случайное начальное положение НС в контейнере, обеспечивающее касание НС с направляющими ТПК в четырёх точках в начальный момент времени. Рассмотрены два закона распределения начального угла v0: нормальный и равномерный. При этом для предварительных оценок угловой скорости отделения рекомендуется использовать равномерный закон, так как он позволяет получить «гарантированные» оценки и избежать принятия ошибочных технических решений. При статистическом моделировании также учитывались погрешности определения координат ЦМ и моментов инерции НС. Можно сделать вывод, что погрешность, с которой измеряются массоцентровочные и инерционные характеристики НС на стенде Самарского университета, не оказывает существенного влияния на оценку угловой скорости отделения НС.
Предлагаемая в данной работе математическая модель может быть полезна разработчикам НС для предварительной оценки их начальной угловой скорости относительно ЦМ при отделении.
