Оценка воздействия космической погоды на синхронизацию времени в системе мониторинга переходных режимов

Автор: Успенский М.И.
Журнал: Известия Коми научного центра УрО РАН @izvestia-komisc
Рубрика: Технические науки
Статья в выпуске: 3 (35), 2018 года.
Бесплатный доступ
При управлении электроэнергетической системой для определения векторов тока и напряжения применяют технику на основе меток времени от глобальных навигационных систем с целью синхронизации момента измерений в различных ее узлах. В статье рассмотрены пути определения таких моментов, погрешности, вызываемые различными причинами природы используемой методики, даны некоторые оценки воздействия космической погоды на точность момента измерений. Сделан вывод об ограниченности применения подобной техники в управлении энергосистемой.
Короткий адрес: https://sciup.org/149128798
IDR: 149128798 | УДК: 621.316: | DOI: 10.19110/1994-5655-2018-3-95-100
Space weather impact estimate on synchronization for wams
The equipment based on the global navigation system timestamp is applied to synchronize the measurement moment in various power buses to define the cur- rent and voltage phasors at the power system control. There is a number of the natural reasons which reduce synchronization accuracy. These are irregularities in an ionosphere layer due to solar radiation, geomagnetic storms, mutual disposition of the navigation signal satellites and receivers, the final equipment accuracy in receiving and signal processing. In this paper the ways of such moments and the errors caused by various reasons of the nature on used equipment are considered, some estimates of space weather impact on the measurement moment accuracy are given. The conclusion about limited use of such equipment in power system control is made.
Текст научной статьи Оценка воздействия космической погоды на синхронизацию времени в системе мониторинга переходных режимов
В последнее время в управлении производством электроэнергии используются метки времени от глобальных навигационных систем (ГНС) для синхронизации момента измерений в различных узлах крупных систем с целью получения фазовых сдвигов измеряемых сигналов. Здесь важным является точность в одновременности момента измерений, т.е. чтобы передаваемая с величинами измерений метка времени в различных точках была максимально синхронизирована для всех измерений. Телеметрия, принятая диспетчерским центром и обработанная оперативно-информационным комплексом с учетом меток времени, позволяет диспетчеру получить полную картину развития событий в случае аварий или нештатных ситуаций. Точ- ность отсчета времени приобретает еще большее значение в системах мониторинга с применением векторных измерений. Связь точности синхронизации по времени с погрешностью по углу измерения 1000000
определяется как At I мкс I = , отку- f[Гц]-3600•60
да для 50 Гц погрешность угла менее 1 мин. требует точности синхронизации 0.926 мкс. Согласно требованиям стандартов [1], для задач электроэнергетики необходимо поддерживать одновременность замеров на уровне 1мкс.
Глобальные навигационные системы (ГЛОНАСС – глобальная навигационная спутниковая система России, GPS – Global Positional System, система глобального позиционирования США) обеспечивают не только определение географических ко- ординат, но и точную синхронизацию часов приемников спутниковых сигналов для организации обеспечения единого времени в системах учета электроэнергии, телемеханики, АСУ ТП и релейной защиты и автоматики.
Причины исследований в рассматриваемой области подробнее изложены в работе [2]. Здесь остановимся на некоторых численных оценках воздействия природных явлений на синхронизацию времени в СМПР или в зарубежной литературе WAMS (система мониторинга переходных режимов – Wide Area Measurement System), которая построена на УСВИ или в зарубежной литературе PMU (устройство синхронизированных векторных измерений – Phasor Measurement Unit). Работа СМПР базируется на отметках времени, поставляемых глобальными навигационными системами типа ГЛОНАСС или GPS.
Причины и оценка ошибки синхронизации. Сначала рассмотрим причины появления ошибок в синхронизации времени. Заметим, что при высоте спутника ГЛОНАСС 19 100 км и его нахождении непосредственно над приемником время распространения сигнала составляет °° = 63.67 мс, 300000
где с= 300 000 км/с – распространения радиосигнала. Очевидно, что при нахождении спутника под углом к приемнику эта величина возрастает. Так, если угол возвышения удаленного спутника составляет α = 20о, то при радиусе Земли r = 6366 км и высоте спутника непосредственно над приемником h = 19100 км разность во времени прохождения сигнала от спутников С и В до приемника А Δ t составит (рис.1):
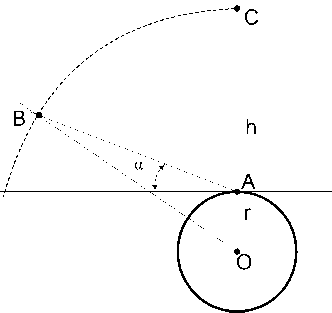
Рис. 1. Разность времени прохождения сигнала.
Fig. 1. A time difference of signal passing.
Л ВАО = 180 ° - (90 ° - Л а ) = 110 ° ;
sin Л ОВА =
r ■ sin Л ВАО r + h
6366 ■ sin 110 ° --------------= 0.235 ;
6366 + 19100
Л ОВА = 13.58 ° ;
Л ВОА = 180 °- 110 ° - 13.58 ° = 56.42 ° ;
( r + h )sin Л ВОА (6366 + 19100)sm56.42 °
АВ =-------------=--------------------= 22578 км ;
sin ЛВАО sm110° дl = 22578 -19100 = 3478км ;
д t = д l / c = 3478000 / 300000 = 11.6 мс .
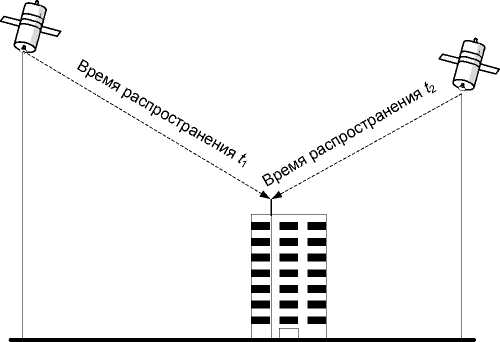
Как позиция приемника, так и синхронизация времени для него определяются при известных точном времени на спутнике и скорости распространения сигнала от спутника к приемнику. Рассмотрим это на простом примере (рис.2). Все необходимые переменные, связанные с приемником, а именно позиция L 1 и временная поправка Δ t распространения сигнала вычисляются с учетом времени его распространения t i и известном расстоянии между спутниками L 2 при известной скорости распространения сигнала с = 300000 км/с. L 2 определяется по известным координатам спутников [3].
Расстояние L 1
Расстояние L 2
Рис. 2. Определение позиции приемника и времени распространения сигнала до него.
Fig. 2. A receiver position definition and signal propagation time to it.
Для позиции на линии достаточно источников сигнала двух спутников
L 2 + ( t 1 - t 2 ) ■ c
-
L1 = 2 .
Для позиции на плоскости требуются три источника, а в пространстве – четыре. Следовательно, для определения расстояния и времени распространения сигналов спутников в 3-мерном пространстве должно наблюдаться не меньше четырех спутников. Заметим, что реально в отсутствии помех (гор, строений или зарослей) можно видеть до пяти … шести спутников. Расстояние до i -го спутника можно определить как R i = t i ٠ c . Но поскольку известны координаты только спутников, то расстояние до него в 3-мерном пространстве
Ri = ^(Xcn.i-Xnp.) +( Ycn.i-Ynp.) +(Zen.i-Znp.) + с ^дt , где неизвестные переменные позиции приемника Xпр. Yпр. Zпр. и погрешность времени распространения ∆t, т.е. необходима система с не менее, чем 4 уравнениями. Поскольку реально с позиции приемника наблюдается больше спутников, то систему можно решать методом наименьших квадратов. В результате получаем расстояния до спутников Ri, по которым можно вычислить и время распространения ti =Ri / c+Δt, необходимое для коррекции момента пуска АЦП устройства синхронизированных векторных измерений.
Понятно, что все известные значения находятся с определенной ошибкой. Ниже перечислены причины появления ошибок:
– Данные по позиции спутника известны с точностью до 1 ÷ 5 м.
– Часы спутника . При стабильности генератора 10-13 ошибка часов за сутки без учета релятивистских явлений составляет примерно 10 нс. Их учет рассмотрен ниже.
– Влияние ионосферы . Ионосфера является частью атмосферного слоя между 60 и 1000 км над поверхностью Земли. Молекулы газа в ионосфере положительно ионизированы. Ионизация, в основном, вызвана солнечным излучением (только во время дня!). Определенное влияние на ионизацию оказывают геомагнитные возмущения в годы активности Солнца. Если сигналы от спутника проходят через вакуум со скоростью света, то в ионосфере скорость этих сигналов замедляется и, следовательно, более не является константой. Уровень ионизации меняется в зависимости от времени и места, усиливается днем и на экваторе, а также под влиянием солнечных штормов. Если влияние ионизации известно, то данный эффект можно компенсировать геофизическими коррекционными моделями. Кроме того, если скорость сигнала зависит от частоты, дополнительно можно сделать коррекцию с помощью двух частот приемника УСВИ, поскольку, чем выше частота, тем сильнее задержка сигнала. Следовательно, можно скорректировать скорость прохождения радиосигнала через ионосферу.
– Влияние тропосферы . Тропосфера является частью атмосферного слоя между 0 и 15 км над поверхностью Земли. Возникновение ошибок здесь обуславливается изменением плотности молекул газа и влажности воздуха. Плотность уменьшается с увеличением высоты. Увеличение плотности или влажности замедляет скорость сигналов спутника. Для коррекции данного эффекта используется простая модель на основе стандартной атмосферы (P) и температуры(T):H – высота, м; T = 288.15oK – 6.5٠10-3٠H, oK; P = 1013 мбар (T/288.15oK)5.256, мбар.
– Отражение . Сигналы спутников отражаются от зданий, деревьев, гор и т.д. и отклоняются перед получением приемником. Сигнал искажается из-за интерференции. Эффект отражения сигналов можно частично компенсировать выбором места расположения (без отражателей), хорошей антенны и времени измерения (рис. 3).
– Влияние приемника . Дальнейшие ошибки возникают из-за шума измерений приемника УСВИ и задержек по времени в приемнике. Сюда же входят так называемые радиопакеты, радиошумы, производимые электромагнитными процессами на Солнце, которые существенно снижают отношение “полезный сигнал/шум”. Современные технологии позволяют учесть такое влияние.
Позиция момента Т 1
Отраженный сигнал не принимается
'N УСВИ
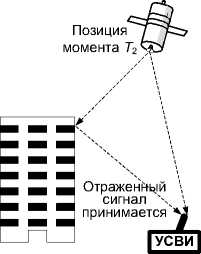
Рис. 3. Наложение отраженного сигнала из-за позиции спутника.
Fig. 3. A reflected signal interference because of a satellite position.
– Влияние взаиморасположения спутников с учетом их возможного затенения (DOP – dilution of precision - «снижение точности»). Точность любого измерения пропорционально зависит от величины DOP. Это означает, что если увеличить DOP вдвое, то ошибка в определении позиции возрастет также в два раза. Значение DOP является обратной величиной по отношению к объему четырехгранника, образованного позициями спутников и приемника. Наилучшее геометрическое расположение при максимальном объеме, и, следовательно, минимальном показателе снижения точности DOP. В работе J.-M.Zogg [2] дана таблица оценочных погрешностей по перечисленным причинам (табл. 1).
Таблица 1
Оценки погрешностей
Estimates of errors
Table 1
|
Причина погрешности |
Величина погрешности в позиции, м |
Величина погрешности во времени, мкс |
Доля погрешности |
|
Данные по позиции |
2.1 |
7 |
0.195 |
|
Часы спутника |
2.1 |
7 |
0.195 |
|
Влияние ионосферы |
4.0 |
13.3 |
0.370 |
|
Влияние тропосферы |
0.7 |
2.3 |
0.065 |
|
Влияние приемника |
1.4 |
4.7 |
0.130 |
|
Влияние взаиморасположения спутников с учетом их возможного затенения |
0.5 |
1.7 |
0.045 |
|
Общее среднеквадратичное значение |
5.3 |
17.5 |
1.0 |
Таким образом, причины погрешности точного времени при передаче его сигналов от спутника к приемнику следующие: задержки в аппаратуре источника и приемника, время распространения радиосигнала от источника к приемнику, фазовые сдвиги из-за явлений отражения и преломления в ионосфере и тропосфере Земли, отставание или замедление времени на борту спутника из-за погрешности датчика времени и релятивистских явлений.
Задержки также делятся на детерминированные и недетерминированные. Первые измеряются при подготовке аппаратуры и затем учитываются при синхронизации бортового источника времени с эталонным источником времени на Земле. Такая синхронизация происходит один-два раза в сутки. Детерминированные погрешности в приемниках также измеряются и учитываются при работе. Погрешность недетерминированной задержки не превышает ±2нс [4]. Вклад в погрешность времени из-за релятивистских явлений (разностью времени, отсчитываемой часами на Земле и часами на борту движущегося спутника) оценен в работе С.Н. Филимонова [5], и на широте Москвы часы спутника опаздывают относительно наземных часов на 0.43 нс за каждую секунду или за 39 мин примерно на 1мкс. Следовательно, коррекция часов спутника должна выполняться с интервалом не более 36 мин, чтобы погрешность расхождения часов не превышала требуемые ±926 нс. Здесь следует отметить, что при единообразной коррекции эта погрешность не имеет заметного значения, поскольку в задачах СМПР важны не столько точность величины времени, сколько одновременность момента измерений в разных узлах большой системы.
Влияние геомагнитных штормов на синхронизацию. Выше отмечалось, что одной из причин появления ошибки синхронизации является геомагнитный шторм – нарушение в магнитосфере
Земли, управляемое изменениями в солнечном ветре [6]. Таким штормом управляет один из высокоскоростных потоков (вспышки мягкого и жесткого рентгена), либо поток извлечения массы короны, причем последний приводит к более существенным воздействиям. При оценке среднего времени до следующего события в вычислении вероятности возниковения при распределениях Бернулли, т.е. независимых событий, либо происходящих, либо нет с постоянной вероятностью возникновения, можно получить как
1 Р ( х ) = ,
-
1 + т
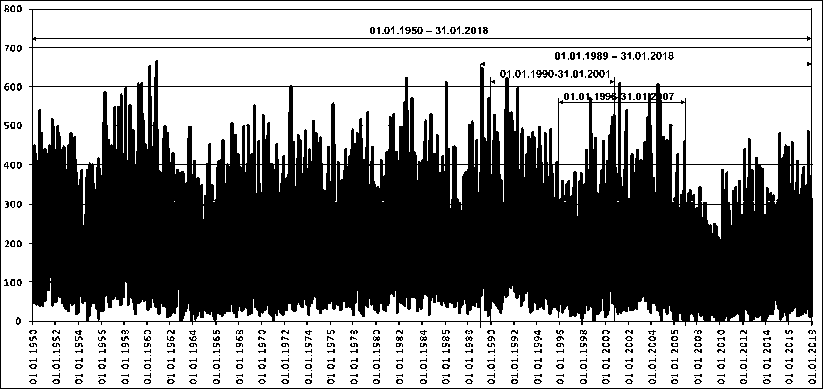
где τ – среднее время между событиями, т.е. сумма промежутков времени между событиями на число этих промежутков.Уровни активности Солнца хорошо отражаются количеством солнечных вспышек по датам (рис. 4). Он дает представление о том , в какие промежутки активности Солнца мы получим оценки вероятности возникновения штормовых геомагнитных возмущений. Диапазоны по датам и нижние уровни значения Dst, характеризующего величину шторма, к соответствующим вероятностям приведены в табл. 2 и показаны на рис. 5.
= 200
Е U ™ 150
о
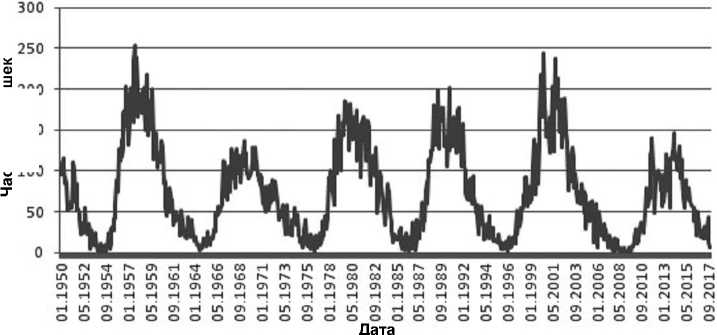
Рис. 4. Уровни активности Солнца по солнечным вспышкам (Использована база данных [7]). Fig. 4. The Sun activity levels on solar flashes (The database [7] is used).
Дата
Рис. 5. Значения |Dst| за период 01.01.1950 31.01.2018 (Использована база данных [7]).
Fig. 5. |Dst| values during 01.01.1950 31.01.2018 (The database [7] is used).
Таблица 2
Оценка вероятности возникновения геомагнитных возмущений
Probability estimate of geomagnetic disturbance emergence
Table 2
|
Диапазон |
| Dst |, нТл |
τ , дней |
P ( x ) |
Примечание |
|
01.01.195028.02.2018 |
300 |
8.5 |
0.105 1/день |
За период 67 лет |
|
01.01.195028.02.2018 |
600 |
1380 |
0.209 1/год |
За период 67 лет |
|
01.01.198928.02.2018 |
300 |
10.4 |
0.088 1/день |
За 28 последних лет |
|
01.01.198928.02.2018 |
600 |
1404 |
0.206 1/год |
За 28 последних лет |
|
01.01.199001.01.2001 |
300 |
7.9 |
0.112 1/день |
Между 2 минимумами |
|
01.01.199001.01.2001 |
600 |
1794 |
0.169 1/год |
Между 2 минимумами |
|
01.01.199601.01.2007 |
300 |
10 |
0.091 1/день |
Между 2 максимумами |
|
01.01.199601.01.2007 |
600 |
607 |
0.375 1/год |
Между 2 максимумами |
Из таблицы видно, что для уровня штормов в 300 нТл вероятность такого возмущения в день составляет в среднем 10%, не сильно отклоняясь в различные периоды солнечной активности (8.8÷ 11.2%). При уровне |Dst| в 600 нТл вероятность этого события лежит в диапазоне 16.9÷37.5%, но уже в год. В периоды штормов от 300 нТл можно ожидать перерывов в связи с ГЛОНАСС, но здесь важна еще длительность такого перерыва, поскольку при коротких перерывах спасает местный источник точного времени, который синхронизировался по каждой временной метке спутников. Его стабильность обычно лежит в диапазоне 10-6 ÷10-12, что позволяет пропустить метки спутников в течение нескольких минут в зависимости от стабильности генератора приемника. Так, при стабильности генератора 10-10 погрешность в 1 мкс наступит уже через 2.8 ч. В табл. 3 даны вероятности того, что событие с |Dst|> 300 нТл продлится более 3 ч за различные периоды наблюдения.
Таблица 3 Оценка вероятности продолжительности геомагнитных возмущений от 3 ч и более
Table 3
Probability estimate of geomagnetic disturbance duration for 3 and more hours
|
Диапазон |
Dst |, нТл |
P ( x ), соб./год |
Максимальный промежуток, часы |
|
01.01.1950-28.02.2018 |
300 |
0.102 |
12 |
|
01.01.1989-28.02.2018 |
300 |
0.274 |
6 |
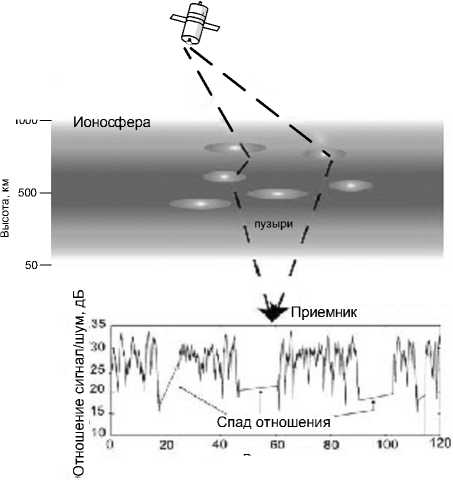
Другие причины природного воздействия на синхронизацию. Генератор приемника спасает и в случае прохождения грозы или присутствия солнечных радиопакетов (СРП), когда связь со спутниками ГЛОНАСС может прерываться на короткое время. Подобное влияние СРП на глобальные навигационные системы было отмечено в первый раз 5 декабря 2006 г. при солнечном минимуме. Этот пакет был величиной в 1 млн солнечных флюксов (один солнечный флюкс =1022 Вт·м2Гц-1); 6, 13 и 14 декабря в том же году зафиксированы события с меньшими потоками. Энергия на частотах ГЛОНАСС была достаточна для вмешательства в работу приемника информации в течение 10 ÷ 20 мин в каждом случае. Данные по позиции нескольких приемников плохо раскодировались (из-за неустойчивости связи) и были потеряны [8]. Следуя приблизительно на 12÷24 ч позади быстрых воздействий, эти пакеты представляли плазменные частицы, связанные с выбросом солнечной короны. Последние косвенно приводят к возмущениям в ионосферной электронной плотности на значительных площадях Земного шара и вызывают крупномасштабные (на10÷1000 км) структуры и градиенты, подобные волне, в ионосфере. Генерируются также небольшие структуры (меньше чем 1 км), и они вызывают сцинтилляцию (т.е. быстрые изменения по амплитуде и фазе) сигналов. Сцинтилляции∗ производятся сигналами, рассеянными в ионосфере из-за упомянутых выше ее неравномерностей, так называемых “пузырей” (рис. 6). Такие колебания обычно происходят в экваториальных и высоких широтах, где они представляют серьезную проблему. Во время экстремальных событий космической погоды ионосферная сцинтилляция может наблюдаться и в средних широтах в глобальной форме.
Время, с
Рис. 6. Влияние ионосферных неравномерностей на отношение сигнал/шум.
Fig. 6. Ionospheric irregularity impact on the signal/ noise factor.
Амплитудная сцинтилляция, вызывающая быстрые изменения в соотношении полезный сигнал-шум, может привести к потере сигнала во всех приемниках. Фазовая сцинтилляция, достаточно нару-
∗ Сцинтилляция – (от лат. scintillatio – мерцание), кратковременная (10 –4 … 10 –9 с) вспышка, возникающая при взаимодействии заряженных частиц солнечного вещества с ионосферой Земли при солнечных штормах.
шающая фазу полезного сигнала, заставляет фазоотслеживающий цикл приемника терять блокировку, влияющую на прием важного навигационного сообщения данных, включающего спутниковые эфемериды (данные о положении спутника). Цикл отслеживания кода, измеряющего расстояние до спутника, довольно устойчив к фазовой сцинтилляции и обычно остается заблокированным. Потеря фазной привязки приемника, используемая в высоко интегрированных приложениях, особенно важна, поскольку эти приемники должны регулярно считывать спутниковое сообщение данных. Для смягчения этого спутник базируется на системах приращения, использующих длину символов сообщения в 500 символов в секунду, вместе с длиной половины кодера и повторения сообщений при ошибках пакета сообщения.
К сожалению, оценки разрушения сообщений ГНС, вызванного сцинтилляцией, связанной с суперштормом, плохие. Существующее предположение представляет полную потерю обслуживания сроком на один день, однако весьма вероятно, что будут периоды, когда, по крайней мере, одна группа спутниковых сигналов может быть получена, и синхронизация времени восстановлена. Для критической инфраструктуры рабочее предположение расширено на перерыв обслуживания сроком до трех дней и включает допуск на реинициализацию совокупности спутников (или системы приращения) после шторма.
Заключение
Современные электроэнергетические системы и, в первую очередь “умные” сети, используют временные метки глобальных навигационных систем для синхронизации измерения векторов токов и напряжений. Однако существует ряд природных и технических явлений, отрицательно воздействующих на выполнение такой функции ГЛОНАСС. К природным явлениям относятся геомагнитные бури, сцинтилляции, грозы, а к техническим можно отнести надежность функционирования технических средств ГНС, в том числе, погрешности измерения времени, окружение антенн приемников сигнала спутников ГЛОНАСС. Оценка вероятности событий, связанных с геомагнитными штормами по базе данных [7], показала, что можно ожидать возмущения при |Dst| > 300 нТлот 38 до 76 событий в год, а из них длительностью более 3 ч один раз в 4…8 лет. Такие оценки указывают на необходимость резервирования автоматики управления режимами электроэнергетических систем с использованием ГНС менее совершенными, но автономными системами, не привязанными к ГНС.
Список литературы Оценка воздействия космической погоды на синхронизацию времени в системе мониторинга переходных режимов
- IEEE Standard for Synchrophasor Measurements for Power Systems IEEE. Std C37.118.1 2011
- Успенский М.И. Природные проблемы синхронизации времени в системе МПР // Методические вопросы исследования надежности больших систем энергетики. Вып. 67. Сыктывкар, 2016. С. 396-402
- Zogg Jean-Marie. GPS. Essentials of Satellite Navigation/u-blox AG, GPS-Compendium, 2009. 174 p. Available: https://www.u-blox.com
- Глобальная навигационная спутниковая система ГЛОНАСС. Интерфейсный контрольный документ. Навигационный радиосигнал в диапазонах L1, L2 с открытым доступом и частотным разделением. М.: РНИИ КП, 2008. 74 с
- Филимонов С.Н. О некоторых проблемах синхронизации точного времени сигналами ГЛОНАСС // Технологии информационного общества. 2013. №7. С.130-132
- Riley P. On the probability of occurrence of extreme Space Weather events // Space Weather. 2012. Vol.10. Iss.2. P. 1-19. Available: https://onlinelibrary.wiley.com/doi/ 10.1029/ 2011 SW000734/full DOI: 10.1029/2011SW000734
- FTP Directory: ftp://ftp.ngdc.noaa.gov/STP/ GEOMAGNETIC_DATA/INDICES/KP_AP
- Walter T., Hansen A., Blanch J. and Enge P./ Robust Detection of Ionospheric Irregularities// Navigation. 2001. Vol.48. Iss.2. P. 89-100
